3547344077
71
Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2012 (94)
Mv) =
- + 0,24
(9)
100+ 8v
z wyznaczoną przez nich - na podstawie własnych badań - aproksymacją dla pociągów dużej prędkości (HST - High Speed Tram)
ju(v) =-—-+ 0,005 • (10)
42 + 0,3 lv 1 '
Oba wykresy przedstawiono na rys. 6. Jak widać, tylko początkowe przebiegi charakterystyk mniej więcej się pokrywają. Powyżej prędkości 30 km/h obie charakterystyki zaczynają się różnić i to znacznie.
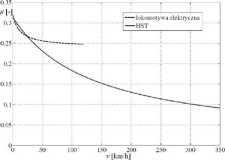
Rys. 6. Zależność współczynnika przyczepności p(v) od prędkości pojazdu dla lokomotywy elektrycznej i dla pociągów dużej prędkości (HST) według badań chińskich [6]
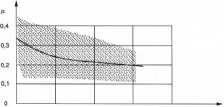
Rys. 7. Zakres zmienności pomierzonych (rzeczywistych) wartości współczynnika przyczepności według Curtiusa i Knifflera w zależności od warunków występujących na styku kolo -szyna [1]
Trzeba też pamiętać, że podane wyrażenia opisują tylko jakąś średnią wartość współczynnika przyczepności. W określonych warunkach równie prawdopodobna jest każda inna wartość tego współczynnika, leżąca w pewnym paśmie, obejmującym wartości powyżej i poniżej krzywej, wyznaczonej na podstawie wzoru (rys. 7) [1,5], Dokładna wartość zależy od warunków panujących między kołem, a szyną (woda, zanieczyszczenia szyn, obecność piasku itp.).
Tak więc bardzo ważnym problemem dla konstruktora pojazdu szynowego staje się pytanie, który przebieg współczynnika przyczepności przyjąć do obliczeń i z jakim prawdopodobieństwem traktować wyznaczone wartości współczynnika przyczepności.
3.3. Maksymalna siła przyczepności pojazdu Jak wynika z zależności (6) maksymalna siła przyczepności pojazdu zależy od współczynnika przyczepności oraz od masy napędnej pojazdu. W przypadku lokomotywy o wszystkich osiach pędnych masa napędna jest równa masie całkowitej lokomotywy. Natomiast masę na-pędną elektrycznych zespołów trakcyjnych z napędem skupionym można w przybliżeniu wyznaczyć, znając całkowitą masę m i całkowitą liczbę osi n pojazdu, oraz liczbę osi pędnych wp, ze wzoru
do
n
Jednak takie postępowanie jest uzasadnione tylko w tych przypadkach, w których masa całkowita pojazdu jest równomiernie rozłożona na wszystkie osie pojazdu. W większości przypadków tak niestety nie jest. EZT pokazany na rys. 8 o układzie osi Bo,-(2')-(2')-(2')-Bo' )' ma znacznie bardziej obciążone oba skrajne wózki, gdyż w przedniej części pojazdu umieszczono przekształtniki trakcyjne, a także dodatkowo, w skrajnych wózkach EZT-a zamontowano silniki trakcyjne. W takich przypadkach masę napędną pojazdu należy wyznaczać indywidualnie jako masy napędne dla każdego zestawu kołowego na podstawie znajomości rozmieszczenia mas na pokładzie i dachu pojazdu, pod jego podłogą oraz w wózkach.

Rys. 8. Przykład elektrycznego zespołu trakcyjnego (EZT), wykorzystujący wózki wspólne, czyli tak zwane wózki Jacobsa Dla przykładu wyznaczmy maksymalną charakterystykę siły przyczepności pojazdu, którego charakterystyki momentu utyku napędu trakcyjnego pokazano na rys. 2. Do obliczeń przyjęto aproksymację współczynnika przyczepności według Curtiusa i Knifflera, zakla-
Bo' - oznacza dwie osie napędne, zgrupowane w jednym wózku, przy czym każdy zestaw kołowy napędzany jest oddzielnym silnikiem; (2') - oznacza dwie osie toczne, zgrupowane w jednym wózku wspólnym (Jacobsa) [4]
Wyszukiwarka
Podobne podstrony:
67 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2012 (94) Lech Lipiński, Mirosław Miszewski Pojazdy
Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2012 (94) Rys. 2. Przeliczenie rodziny charakterystyk
72 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2012 (94) dając, że masa całkowita pojazdu wynosi 8
74 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2012 (94) czepności. W przypadku lokomotyw 4-osio-w
69 Zeszyły Problemowe - Maszyny Elektryczne Nr 1/2012 (94) ruchowe silnika. Powyższa uwaga nie dotyc
70 Zeszyły Problemowe - Maszyny Elektryczne Nr 1/2012 (94) 3. Współczynnik przyczepności koło -szyna
73 Zeszyły Problemowe - Maszyny Elektryczne Nr 1/2012 (94) Rys. 9. Charakterystyka siły utyku napędu
89 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2013 (98) Jarosław Załęski, Michał Dadana, Paweł
90 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2013 (98) magnetycznej urządzeń „automotive" t
91 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2013 (98) > awarię na skutek u
92 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2013 (98) Tabela 1. Wybrane parametry badanego
93 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2013 (98) 5. Wnioski Układ napędo
49 Zeszyty Problemowe - Maszyny Elektryczne Nr 73/2005Zbigniew Szulc, Włodzimierz Koczara Politechni
50 Zeszyty Problemowe - Maszyny Elektryczne Nr
51 Zeszyty Problemowe - Maszyny Elektryczne Nr 73/2005 T
52 Zeszyty Problemowe - Maszyny Elektryczne Nr 73/2005 k, [kVAih/mI] Q [m‘/h] Rys. 4. Zależność
53 Zeszyty Problemowe - Maszyny Elektryczne Nr 73/2005 Na rys. 6 zostały przedstawione wyniki pomiar
116 Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) szczenią, zasady pomiaru, wartości odnie
Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) 119 PN-EN 14253+A 1:2011 PN-EN
więcej podobnych podstron