5441336903
512
J. Giergiel, W. Żylski
with nodal linę described as a, substituting driving wheels 1, 2 and free rolling wheel 3, was assumed. For the model accepted in such a form, assuming that there is one piane of motion, unambiguous formulation reąuires setting of the coordinates of the point A, angle of instantaneous rotation j3, and angle a, that is the following coordinates: xa, Da-, P, cc. The analysed system is non-holonomic, so these coordinates are linked by eąuations of constraints imposed on the velocity
xa — to. cos P = 0 yA — Ta sin P = 0 (1-1)
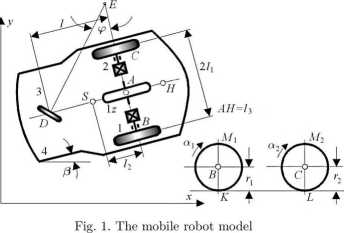
Dependences (1) arise from projections of the point of contact of wheel lz contact with the road onto XY axes. These are eąuations of classical non-holonomic constraints, which can be written in a matrix form
(1.2)
J(<j)g = 0
where the Jacobian matrix is defined as
1 0 0
0 1 o
—r cos P —r sin 0
(1.3)
whereas q= [xa,VAi/3,oż\T■
To describe motion of the model, Lagrange’s eąuations of the second kind are used. For a non-holonomic system they are written in the following vector form
(1.4)
Wyszukiwarka
Podobne podstrony:
DSC01390 c His body Has been described as a “freak of naturę" and : J j
figure eight[1] FIGURĘ EIGHT This knot can also be tied by tying a Figurę Eight Knot with doubled li
CML ENGINEERING I DESCRIPTION Students gain theoretical knowledge and practical skills connected wit
Katherine Pierce katherine pierce 20157301 800 600 ■* r Other things aay chaage as. but we start and
Ittman 39 PHYSICAL CUCTURE ANO BREATHING. 39 Exercise No. I. Clasp right wrist with the left hand, a
milo 01 06 PRELIMINARY £X£RCI5E NO. 5 For Ilia Waitt R*
MACHINĘVISION PT. LANIUS INOVASI INDONESIA COME WORK WITH US! OPEN POSITION AS MTA
night im day * -5 IE +5 IE - black linę, HR slowing -white linę, * p<0.05 as compared to INI
więcej podobnych podstron