Politechnika Śląska
Wydział Elektryczny
LABORATORIUM
ROBOTÓW I MANIPULATORÓW
Temat: Sterowanie napędem robota.
Sekcja: Marcin Szymik
Wojciech Górywoda
Grzegorz Wawręty
Cel ćwiczenia
Celem ćwiczenia jest sformułowanie modelu matematycznego silnika prądu stałego napędzającego pojedynczy człon manipulatora, następnie po sformułowaniu modelu implementacja w postaci graficznej w programie MATLAB/SYMULINK, a w końcowym etapie zbudowanie modelu sterowania silnika „od punktu do punktu „ z wykorzystaniem regulatora PID.
Przebieg ćwiczenia
Modele silnika
(sL+R)Ia(s)=U(s)-sKbΘ(s)
(s2Jm+sBm) Θ(s)=KiIa(s)-rTobc(s)
Na podstawie powyższego układu równań oraz poniższych parametrów zbudowano układ poniżej.
Jm = 0,3
Bm = 0,01
R = 1Ω
L = 0,05H
Kb = 0,215
Ki = 10
U = 200V
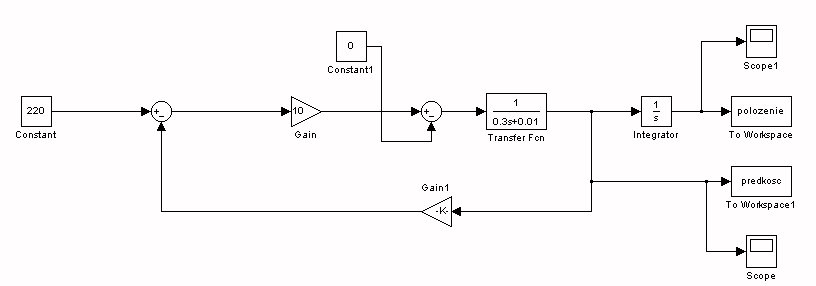
Rys.1. Schemat blokowy silnika prądu stałego.
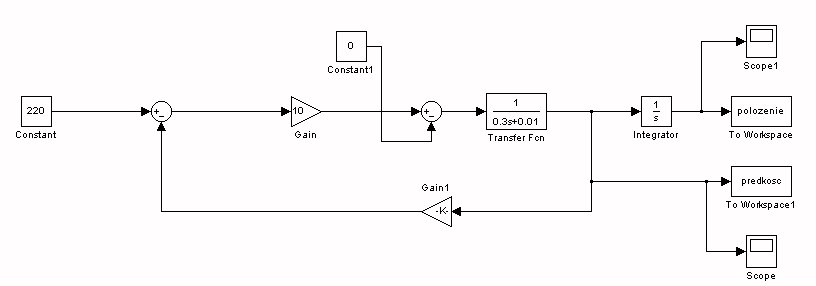
Rys.2. Schemat blokowy silnika prądu stałego ze zredukowanym rzędem.
Dokonano symulacji rozruchu silnika (wymuszenie skokiem napięcia) dla nieobciążonego rT=0 i obciążonego silnika rT=20Nm.
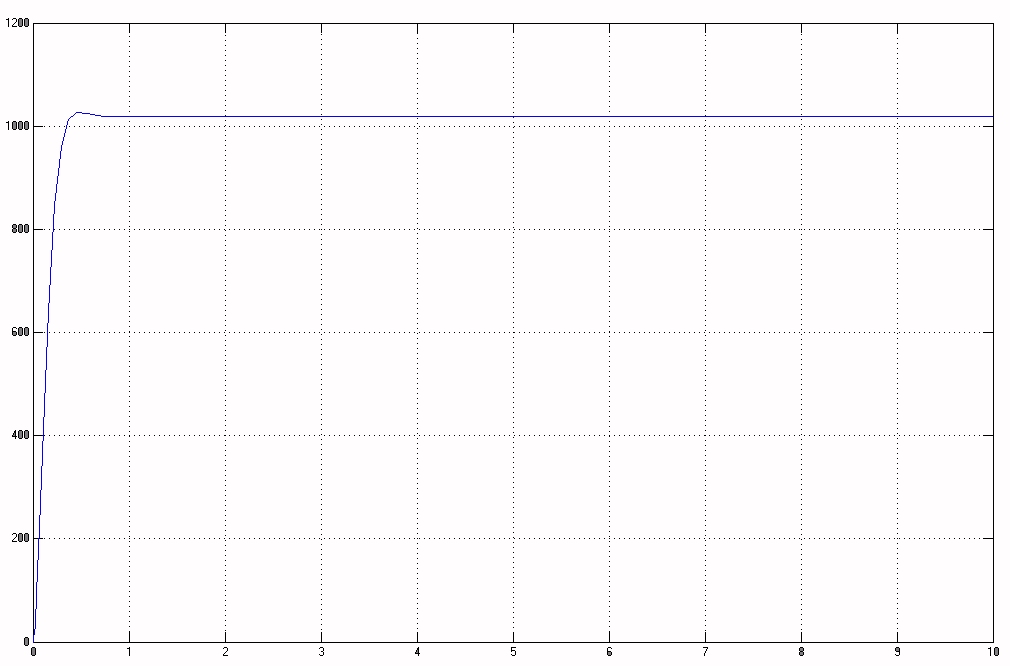
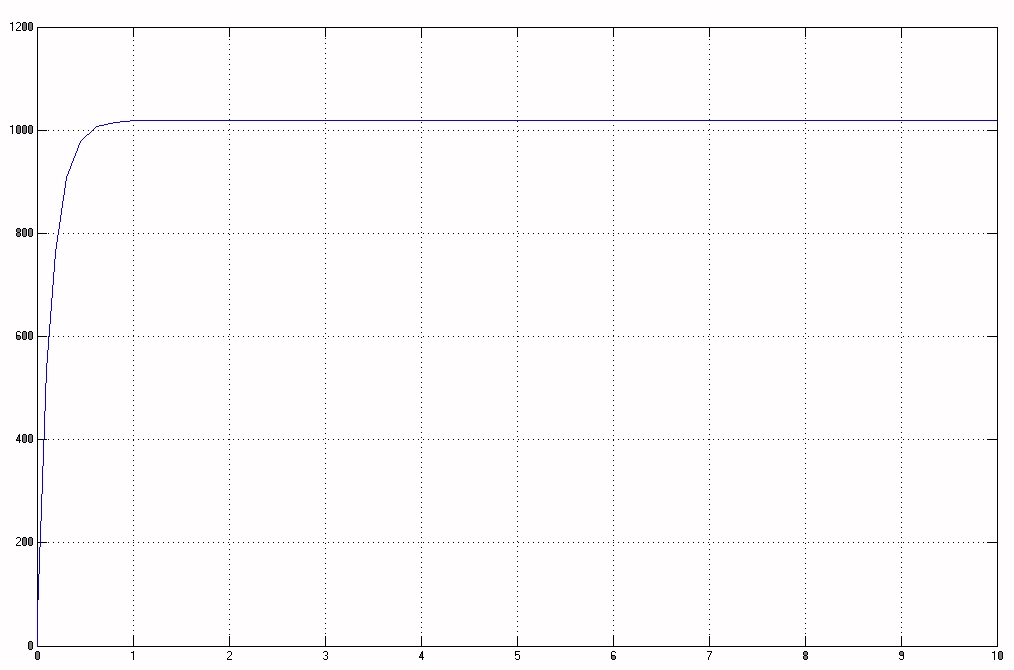
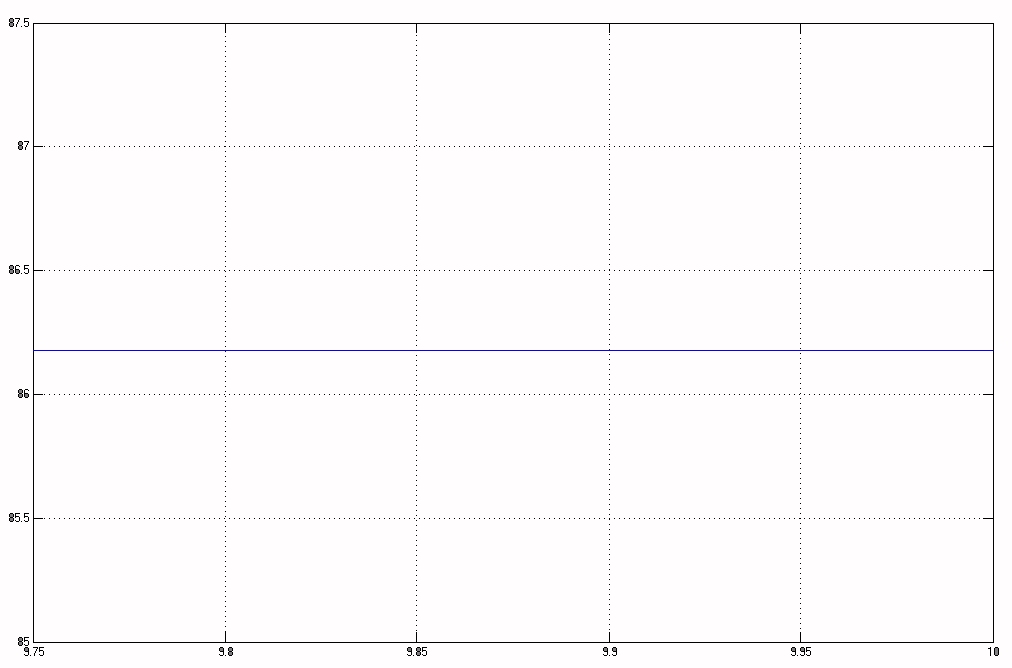
Rys.3. Wykres prędkości obrotowej wału silnika dla rT=0 Nm.
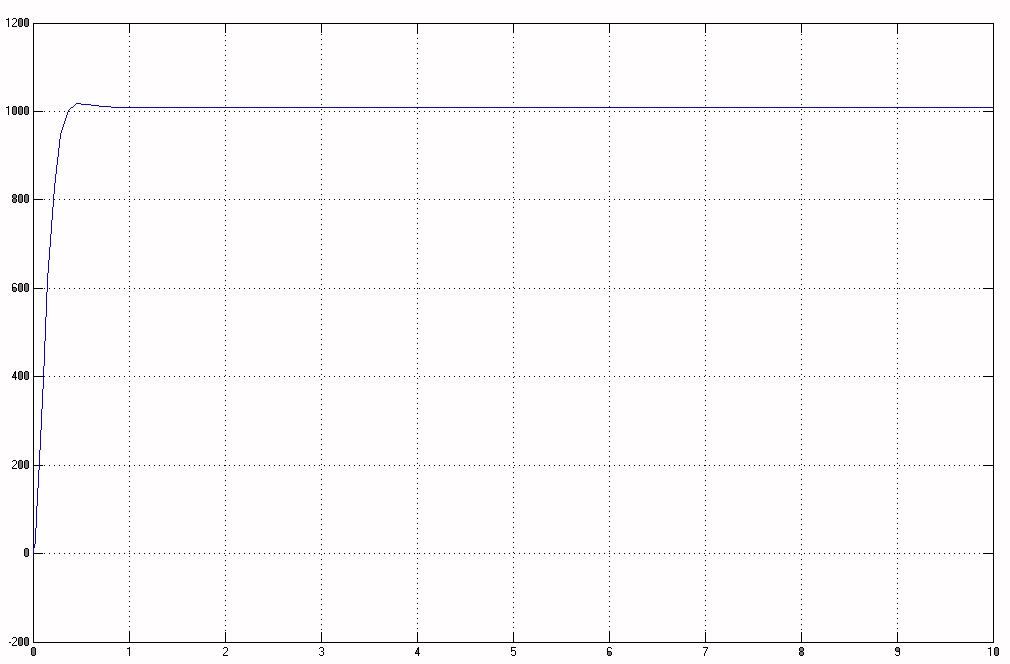
Rys.4. Wykres prędkości obrotowej wału silnika dla rT=20 Nm.
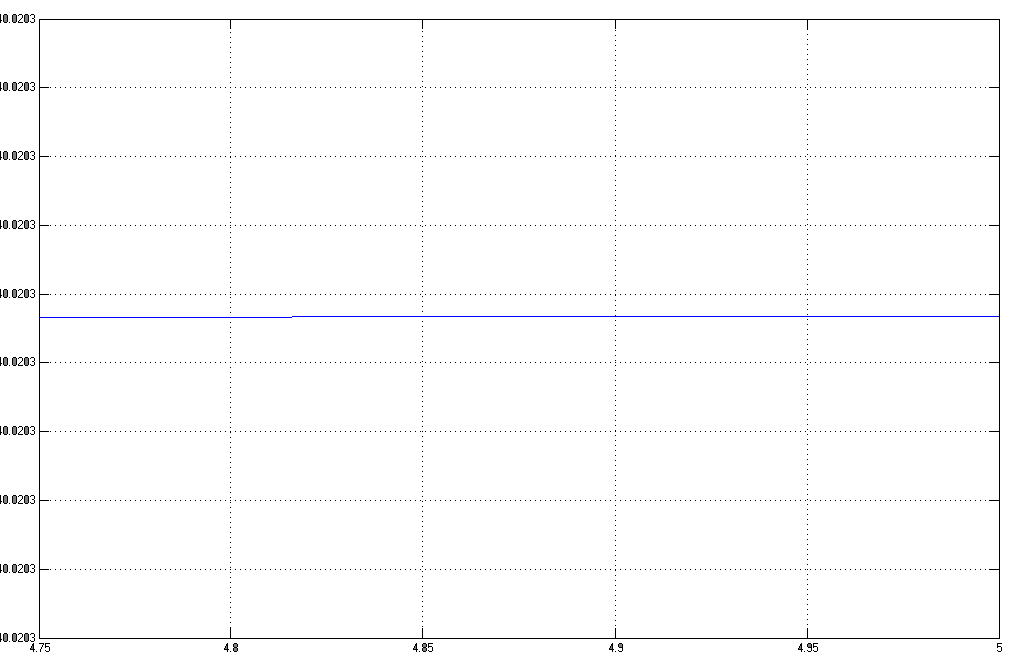
Rys.5. Wykres prędkości obrotowej wału silnika ze zredukowanym rzędem dla rT=0Nm.
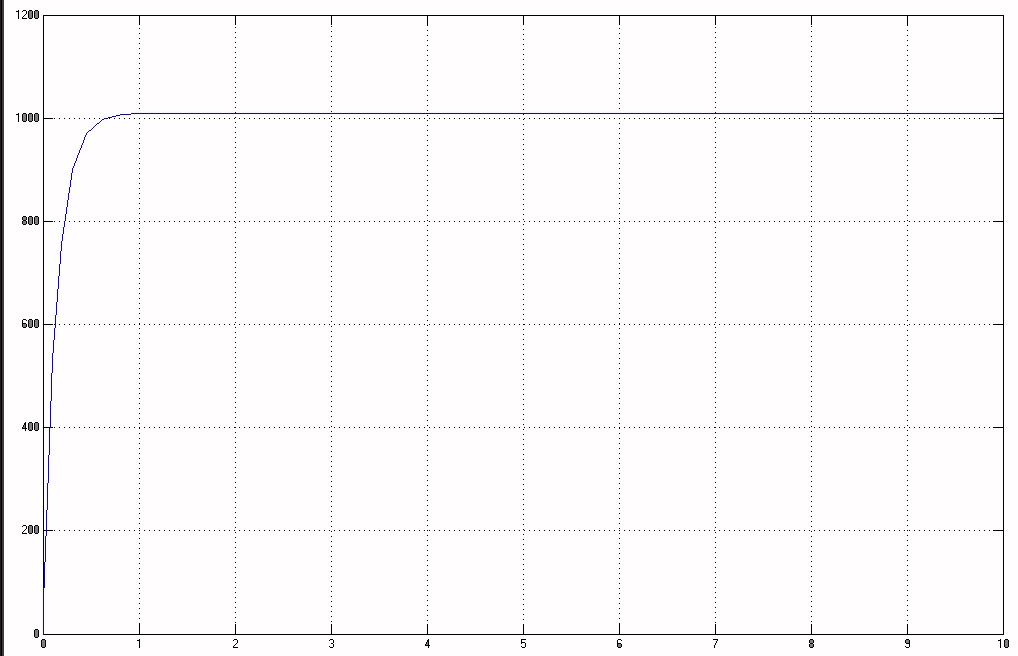
Rys.6. Wykres prędkości obrotowej wału silnika ze zredukowanym rzędem dla rT=20Nm.
Sterowanie silnika - regulator PI
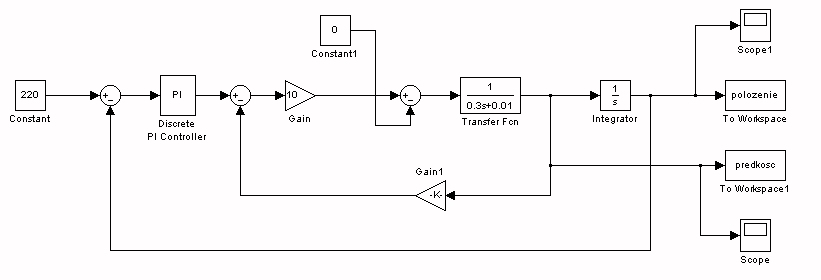
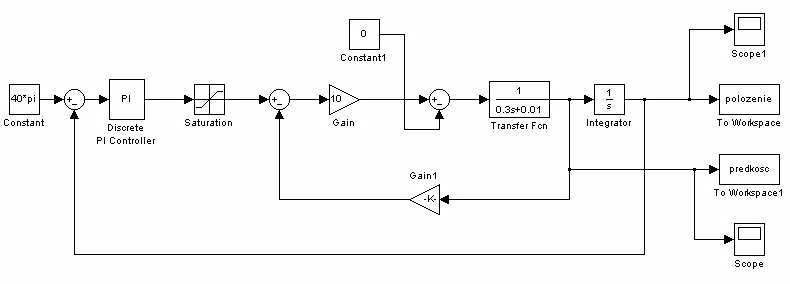
Rys.7. Model sterowania układu silnika.
Dokonano symulacji pracy silnika poprzez zadanie położenia dla nieobciążonego rT=0
i obciążonego silnika rT=20Nm przed i po strojeniu regulatora.
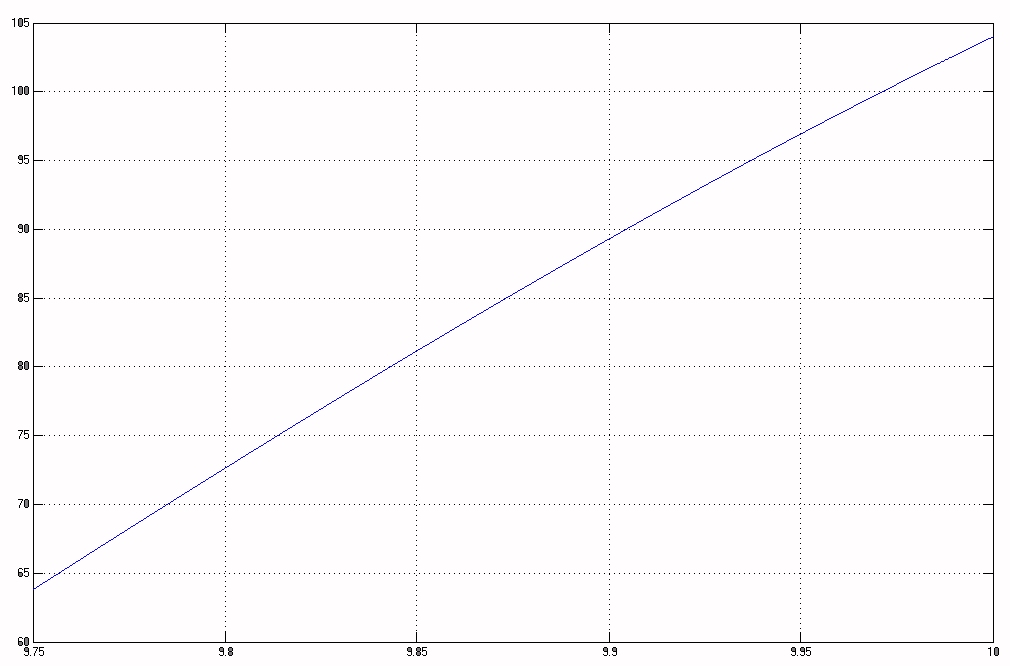
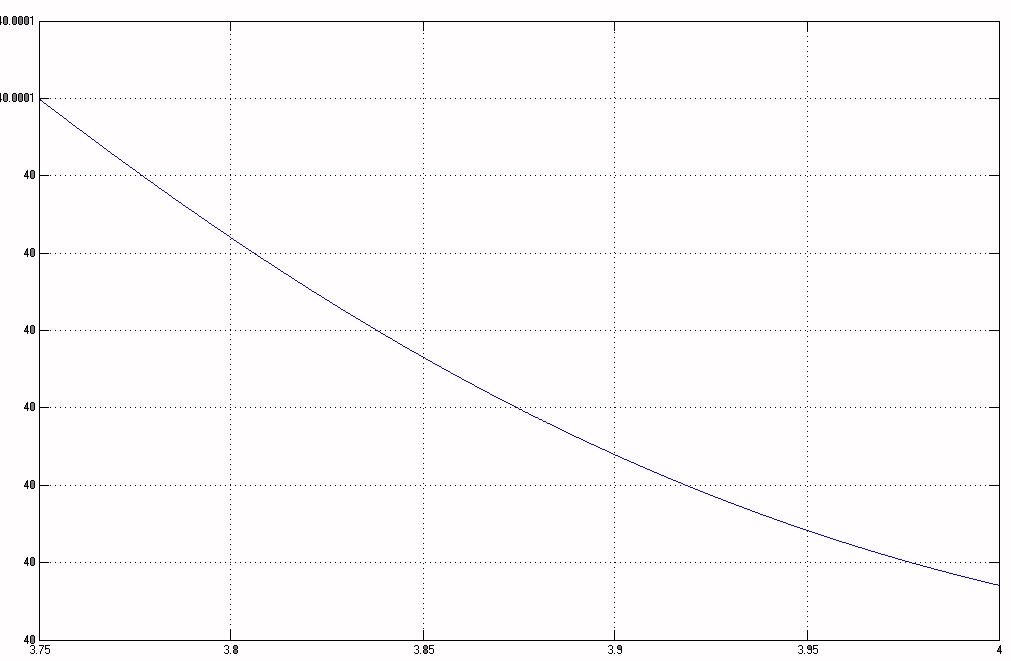
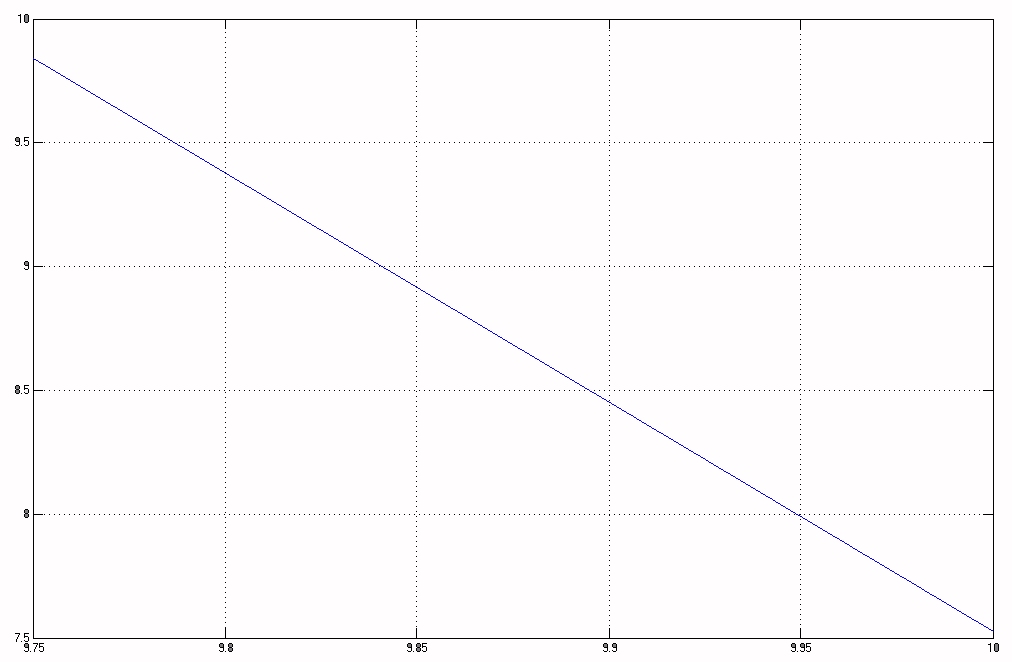
Rys.8. Wykres położenia wału silnika przed strojeniem regulatora dla rT=0Nm.
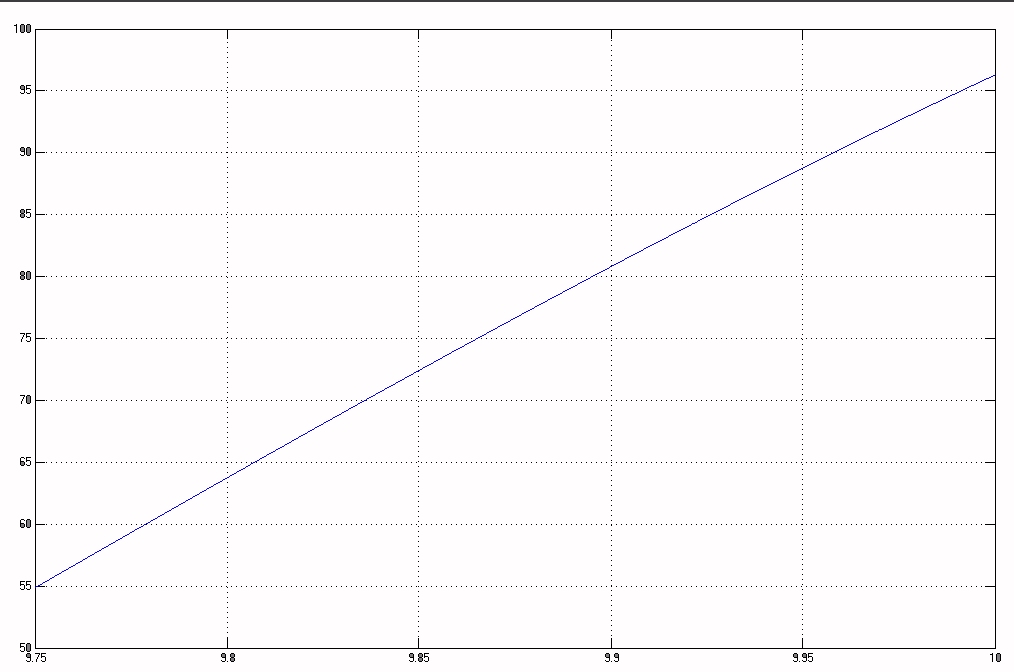
Rys.9. Wykres położenia wału silnika po dostrojeniu regulatora dla rT=0Nm.
Rys.10. Wykres położenia wału silnika przed strojeniem regulatora dla rT=20Nm.
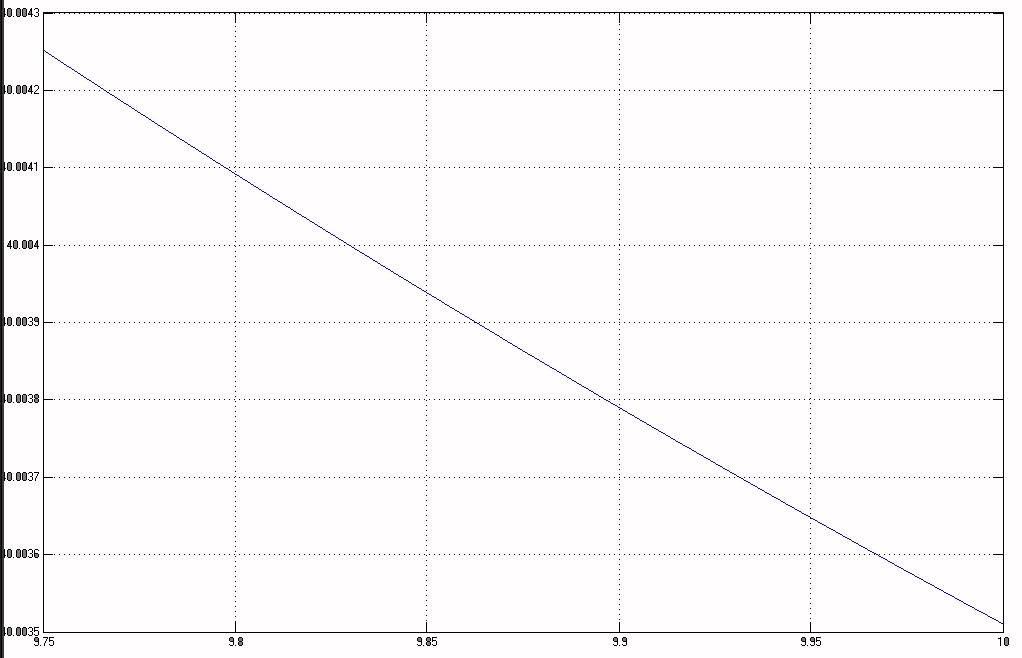
Rys.11. Wykres położenia wału silnika po dostrojeniu regulatora dla rT=20Nm.
Rys.11. Model sterowania układu silnika z ograniczeniem napięcia.
Rys.12. Wykres położenia wału silnika (z ograniczeniem napięcia) przed strojeniem regulatora dla rT=0Nm.
Rys.13. Wykres położenia wału silnika (z ograniczeniem napięcia) po dostrojeniu regulatora dla rT=0Nm.
Rys.14. Wykres położenia wału silnika (z ograniczeniem napięcia) przed strojeniem regulatora dla rT=20Nm.
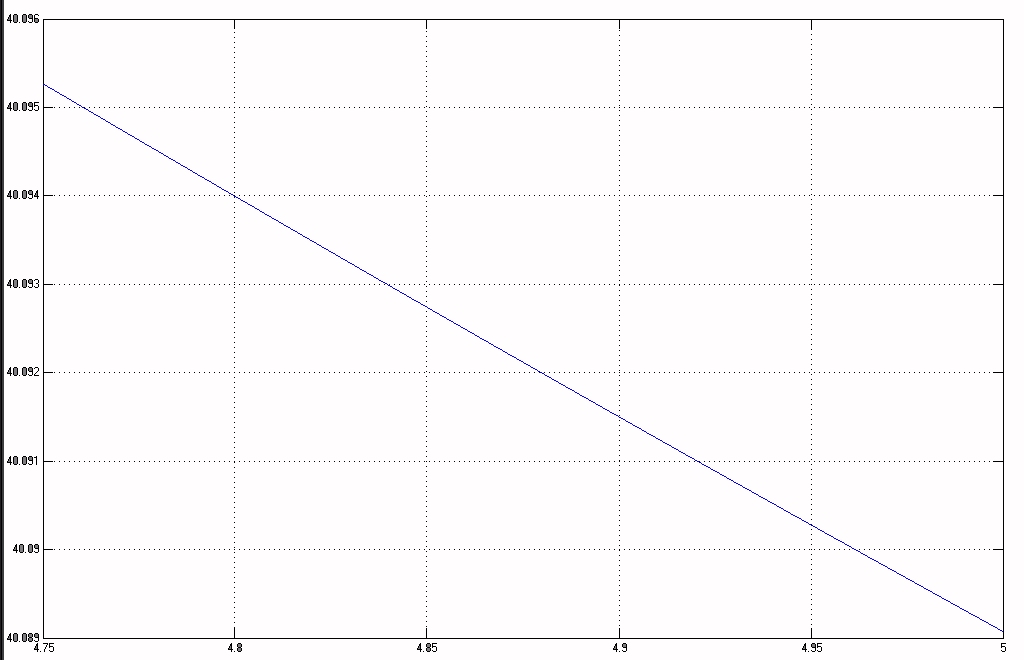
Rys.15. Wykres położenia wału silnika (z ograniczeniem napięcia) po dostrojeniu regulatora dla rT=20Nm.
WNIOSKI I UWAGI
Jak widać z charakterystyk dojście do prędkości znamionowej dla silników ze zredukowanym rzędem jest łagodniejsze. Gdyby taki silnik istniał byłoby to jego zaletą, gdyż podczas dochodzenia do tej prędkości nie występują oscylacje. Niestety jest to tylko model matematyczny.
Aby uzyskać zadane położenie moment silnika musi zrównoważyć moment obciążenia. Dla obciążenia znamionowego i zadanych parametrów wstępnych (P=1, I=0) nie jest to możliwe.
Od regulatorów wymagamy aby wartość zadana została osiągnięta jak najszybciej oraz żeby dojście do niej nie było poprzedzone oscylacjami. Zwiększając wzmocnienie Kp zwiększa się liczba oraz amplituda oscylacji co nie jest korzystne, jednakże układ szybciej dochodzi do wartości zadanej (ch-ka 6.1.2). Natomiast zmniejszając Kp układ nie oscyluje, ale dojście do zadanej pozycji zajmuje mu więcej czasu (ch-ka 6.1.2 - czas się wydłużył o 1s). Dla niewyregulowanego układu z ograniczeniem i zadanym obciążeniu M=0Nm układ osiąga dalsze położenie, a dla M=20Nm w ogóle do niego nie dochodzi.
Wyszukiwarka
Podobne podstrony:
Laboratorium MT, POLITECHNIKA ŚLĄSKA Wydział Mechaniczny-Technologiczny - MiBM POLSL, Inżynierskie,
LABORKI NAP HYDR1 , Politechnika, Sprawozdania, projekty, wyklady, Automatyka
obrabiarki sterowanie numerycznie, POLITECHNIKA ŚLĄSKA Wydział Mechaniczny-Technologiczny - MiBM POL
my Dyskretne uk ady regulacji v.4, Elektrotechnika AGH, Semestr IV letni 2013-2014, Teoria Sterowani
Sterowanie wieloosiowym napędem robota IRB 6 M Pawlak, K Krawczyk
KARTA INSTRUKCYJNA OBROBKI2, POLITECHNIKA ŚLĄSKA Wydział Mechaniczny-Technologiczny - MiBM POLSL, Se
17 listopada, Politechnika Śląska semestr I GiG, Górnictwo
wzory Finanase przedsiebiorstw, Politechnika Śląska ZiIP i inne, Finanse
czystakartainstrukcyjnaobrobki, POLITECHNIKA ŚLĄSKA Wydział Mechaniczny-Technologiczny - MiBM POLSL,
Rozk ad labów, POLITECHNIKA ŚLĄSKA Wydział Mechaniczny-Technologiczny - MiBM POLSL, Inżynierskie, Se
Politechnika Śląska sprawko moje (Naprawiony)
Politechnika śląska w gliwicach sprawko na dziekana
podstawowe informacje o ochronie prawnej wzorów przemysłowych, Studia - Politechnika Śląska, Zarządz
Projekt (chemia), Uczelnia - Politechnika Slaska, Chemia, Chemia
Testy 5 ekonomika podatkowa, Politechnika Śląska ZiIP i inne, Ekonomika podatkowa
więcej podobnych podstron