WYKŁAD 11
DRGANIA PUNKTU MATERIALNEGO
Drgania swobodne nietłumione
Drganie ruch drgający punktu materialnego jest to ruch w dostatecznie małym otoczeniu położenia swojej równowagi stałej x
A 0 m B
A, B położenia krańcowe punktu materialnego m
0 punkt położenia równowagi stałej
Drgania swobodne drgania zachodzące pod działaniem
sił sprężystych
Drgania swobodne nietłumione drgania swobodne bez
działania sił oporu (np. tarcia, oporu powietrza itd.)
Przypomnienie z Wytrzymałości Materiałów
Belka zginana P
(a)
l P = kf =kcP k = 1/c
Sprężyna rozciągana
D P = 0
Rys.16 f
P
(b)
k sztywność sprężyny
k = 1/c (b1)
Koniec Wytrzymałości Materiałów
Przypadek gdy drga masa m zawieszona na sprężynie (17) o sztywności k (rys.16).
W położeniu równowagi na punkt materialny
działają siły:
Q siła ciężkości, S0 = kλst reakcja sprężyny (c)
z równania (c) wydłużenie sprężyny λst = S0/k = Q/k =mg/k
Początek układu współrzędnych
przyjęto w położeniu równowagi
punktu materialnego.
Siły działające na punkt material- S0
-ny wychylony z położenia równo-
-wagi przedstawiono na rys.17.
Dynamiczne równanie różniczkowe Q x S
ruchu punktu materialnego ma Rys.17
postać ![]()
x Q
![]()
(d)
dzieląc stronami (d) oraz przenosząc -kx na prawą stronę
otrzymujemy 
![]()
(19)
rozwiązaniem (19) jest funkcja ![]()
przy przyjęciu że ![]()
, ![]()
mamy że:
![]()
(20)
bo ![]()
Z równania (20) wynika, że rozważany punkt materialny porusza się ruchem harmonicznym prostym, przy czym częstość drgań własnych ω0 równa się częstości kołowej.
Stąd okres drgań wynosi
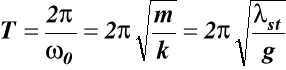
(21)
Określenie C1, C2, *0
![]()
![]()
(e)
![]()
(e1)
gdzie: A amplituda drgań
*0 faza początkowa
Stałe całkowania wyznaczamy z warunków
początkowych. Dla przykładu dla t = 0, wychylenie punktu
materialnego z położenia równowagi wynosiło x0,
Równania ruchu i prędkości mają postaci
![]()
(22)
![]()
(22a)
dla t = 0 mamy: C1 = x0 , C2 = V0/ω0
równanie (22) ma postać
(f)
Na podstawie zależności (e)
(g)
Okres drgań określamy ze wzoru (21), a częstotliwość
(h)
Przykład 12
Określić równanie ruchu masy m = 20kg, zawieszonej na sprężynie, jeśli dla t = 0, x0 = 5mm, V0 = 30mm/s. Dane sprężyny: D = 100mm, d = 5mm, G = 8⋅104MPa, i = 20.
Rozwiązanie
Z zależności (b) i (b1) 
Z zależności (19) 
ω0 = 3.95 /s z równania (f) równanie ruchu ma postać 
Drgania swobodne tłumione
Przypadek gdy na punkt materialny m działają siły:
S = kx proporcjonalna do wychylenia
R = -cVx opór którego wartość jest proporcjonalny do
pierwszej potęgi prędkości (rys.18)
Dynamiczne równanie różniczkowe
ruchu punktu ma postać
![]()
(23)
Po uporządkowaniu i oznaczeniu


m
Równanie (23) przyjmuje postać x ![]()
![]()
(i)
Aby rozwiązać (i) podstawiamy x Rys.19
![]()
(j)
Po zróżniczkowaniu (j) ![]()
, ![]()
(k)
Po podstawieniu (k) do (i)
![]()
![]()
(l)
Pierwiastki równania (l)
![]()
(m)
gdzie ![]()
W zależności od wartości wyróżnika równanie charakterystyczne (l) może mieć trzy różne rozwiązania:
a. Przypadek tłumienia nadkrytycznego (n>ω0)
Wyróżnik równania charakterystycznego jest większy od
zera, pierwiastki równania charakterystycznego są
rzeczywiste i oba ujemne, a rozwiązanie ogólne równania
(i) ma postać

(n)
Jest to przypadek silnego tłumienia, ruch aperiodyczny.
b. Przypadek tłumienia krytycznego (n = ω0)
Wyróżnik równania charakterystycznego jest równy zeru
Rozwiązaniem jest jeden ujemny pierwiastek podwójny
![]()
(o)
Rozwiązanie równania (i) ma postać
![]()
(p)
c. Przypadek tłumienia podkrytycznego (n < ω0)
Wyróżnik równania charakterystycznego jest mniejszy
od zera, równanie (l) ma wtedy dwa pierwiastki
zespolone i rozwiązanie ogólne równania (i) ma postać
![]()
(r)
gdzie ![]()
jest częstością drgań tłumionych
Charakter ruchu przedstawiono na rys.20. Ruch ma charakter o amplitudzie r0e-nt stale malejącej
x
t1 t2 t T = t2 - t1
T Rys.20 Drgania swobodne tłumione
(tłumienie podkrytyczne)
Drgania wymuszone nietłumione
Jeśli poza siłą ciężkości i siłą sprężystą na punkt materialny działa okresowo zmienna w czasie siła wymuszająca, to powstające wtedy drgania nazywamy
wymuszonymi. 26dyn
Na punkt materialny S
działa siła zewnętrzna m
![]()
(rys.21), mg
oraz mg i S = kx P x Rys.21
Dynamiczne równanie różniczkowe ruchu
(s)
Równanie (s) jest liniowym równaniem różniczkowym niejednorodnym, rozwiązaniem jest ![]()
(u)
x1 rozwiązanie równania jednorodnego
x2 rozwiązanie szczególne równania niejednorodnego
![]()
![]()
(w)
Po podstawieniu (w) do (s) i przyrównaniu współczynników przy tych samych funkcjach trygonometrycznych znajdujemy wartość stałej A. Patrz poniżej:
, 
stąd 
(z)
Aby określić C1 i C2 przyjmujemy
dowolne warunki początkowe (dla t = 0, x = x0, ![]()
)
Patrz poniżej: z (u) mamy
x = x1 + x2 =![]()
dla t = 0, x = x0 = C1 C1 = x0
![]()
Po podstawieniu C1, C2, A do (u) otrzymujemy

27dyn
Wykres A w funkcji A
ω/ω0 (rys.22)
P0/(mω02)
Rys.22 0 1 2 3 ω/ω0
21dyn
22dyn
23dyn
24dyn
25dyn
Wyszukiwarka
Podobne podstrony:
Mechanika - Dynamika, dynamikawyklad8, wykład 8
Mechanika - Dynamika, dynamikawyklad10, Zasady ruchu dla punktu materialnego Wykład 10
Mechanika - Dynamika, cwiczeniadynamika11, Ćwiczenie 11
Tlumienie dynamiczne w ukladach sprezystych, sem III, +Mechanika Techniczna II - Wykład.Ćwiczenia.La
Dynamika, Budownictwo, Mechanika, Dynamika
Mechanika - Dynamika, cwiczeniadynamika12, Cwiczeniadynamika11
dynamikawyklad13, Wykład 13
Dynamika Wykłady Część teoretyczna
Mechanika płynów wykład 11
Mechanika - Dynamika, cwiczeniadynamika10, Ćwiczenia 10
Pozycjonowanie dynamiczne wykład
Mechanika nieba wykład 11
Dynamika ściąga, MECHANIKA (DYNAMIKA)
mechanika-dynamika, budowictwo pcz (h.fresh06), I rok (sem I i sem II), mechanika toeretyczna, egzam
Mechanika - Dynamika, dynamikawyklad12, DYNAMIKA UKŁADU PUNKTÓW MATERIALNYCH
Mechanika - Dynamika, cwiczeniadynamika13, Przykład 47
Term-3R, Budownictwo, Mechanika, Dynamika
Term-1R, Budownictwo, Mechanika, Dynamika
Mechanika I dynamika (cz 2)
więcej podobnych podstron