Praca, moc, energia –
praca
cos
s
F
s
F
W
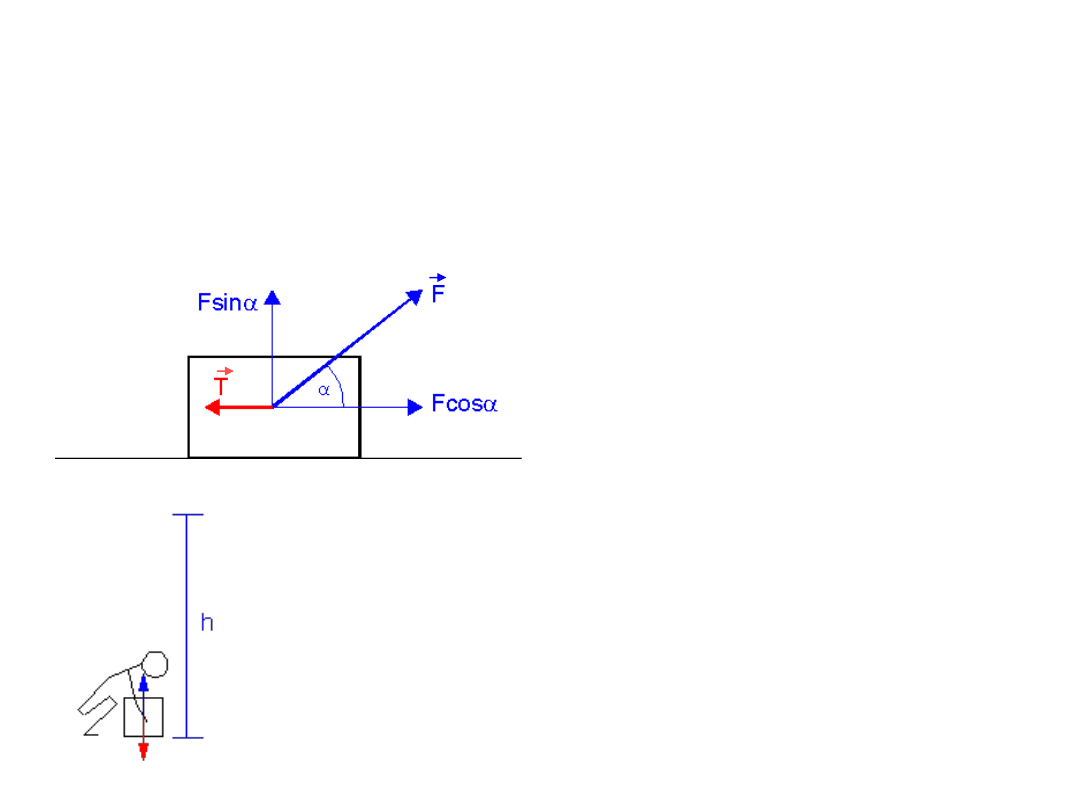
Praca W wykonana przez stałą siłę F jest iloczynem skalarnym tej siły F i
wektora przesunięcia s
W > 0 gdy
α < 90°,
W < 0 gdy
α > 90°,
W = 0 gdy
α = 90°.
W trakcie podnoszenia ciała na wysokośd h człowiek działa siłą
F równą ciężarowi ciała ale przeciwnie skierowaną, więc
wykonuje "dodatnią" pracę W = mgh
Praca wykonana przez człowieka jest równa co do wartości
"ujemnej" pracy wykonanej przez siłę ciężkości.
Praca, moc, energia –
praca
x
F
W
n
i
i
1
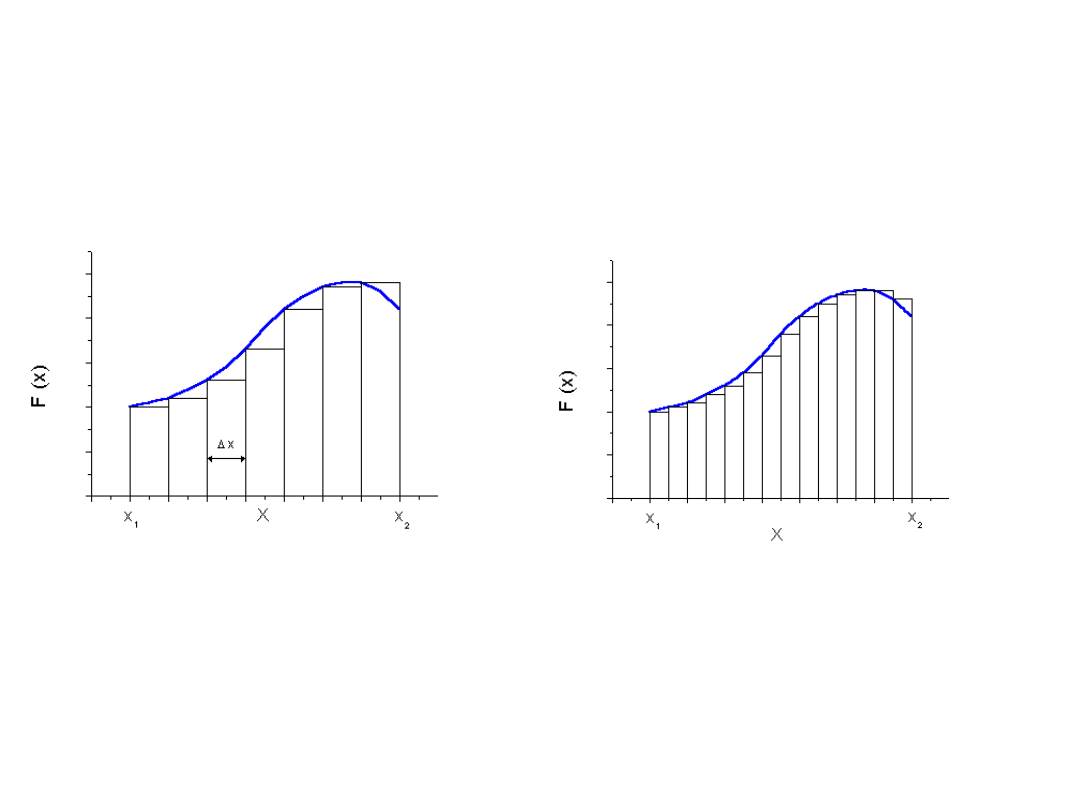
Praca wykonana przez siłę zmienną.
x
F
W
i
i
2
1
)
(
lim
1
0
x
x
n
i
i
x
dx
x
F
x
F
W
Jednostką pracy jest w układzie SI dżul (
J
); 1J = 1N·m.
W fizyce atomowej powszechnie używa się jednostki elektronowolt (
eV
); 1eV =
1.6·10
-19
J.
Praca, moc, energia – moc
dt
dW
t
W
P
t
lim
0
F
dt
s
d
F
dt
dW
P
Moc definiujemy jako ilośd wykonanej pracy
do czasu w jakim została ona wykonana.
Jeżeli praca W została wykonana w czasie
t to
średnia moc
jest
dana wzorem:
Dla stałej siły F wzór ten przyjmuje postad:
Dla czasu t → 0 mówimy o
mocy chwilowej:
t
W
P
Praca, moc, energia –
energia
2
v
2
0
t
a
t
x
energia kinetyczna
określona przez masę i prędkośd,
energia potencjalna
określona przez masy i ich wzajemne
położenia
t
a
t
a
0
0
v
v
v
v
t
x
2
v
v
0
2
v
2
v
2
v
v
v
v
2
0
2
0
0
m
m
t
t
m
x
a
m
x
F
W
2
v
2
m
E
k
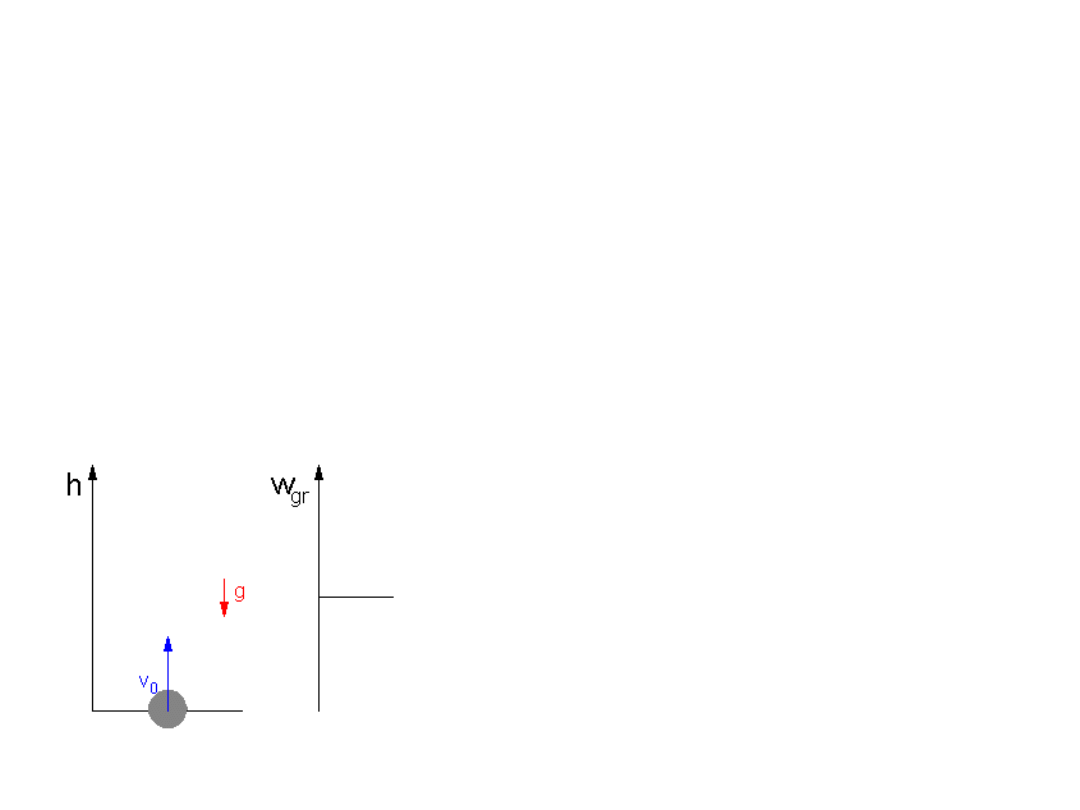
Ruch prostoliniowy pod wpływem
działania stałej siły F
Wykonana przez siłę F praca jest równa
Połowę iloczynu masy ciała i kwadratu prędkości
nazywamy
energią kinetyczną
Praca wykonana przez
wypadkową siłę F
działającą na punkt
materialny jest równa
zmianie energii kinetycznej
tego punktu -
twierdzenie o
pracy i energii
W = E
k
– E
k0
Praca, moc, energia –
energia
0
E
h
g
m
E
p
Energia potencjalna jest energią, którą dane
ciało, podlegające działaniu pewnej siły,
ma dzięki swemu położeniu w przestrzeni.
Pole jednorodne to pole, które w każdym punkcie jest jednakowo silne: działa ono na
ciało siłą o stałej wartości, kierunku
i zwrocie niezależnie od położenia ciała.
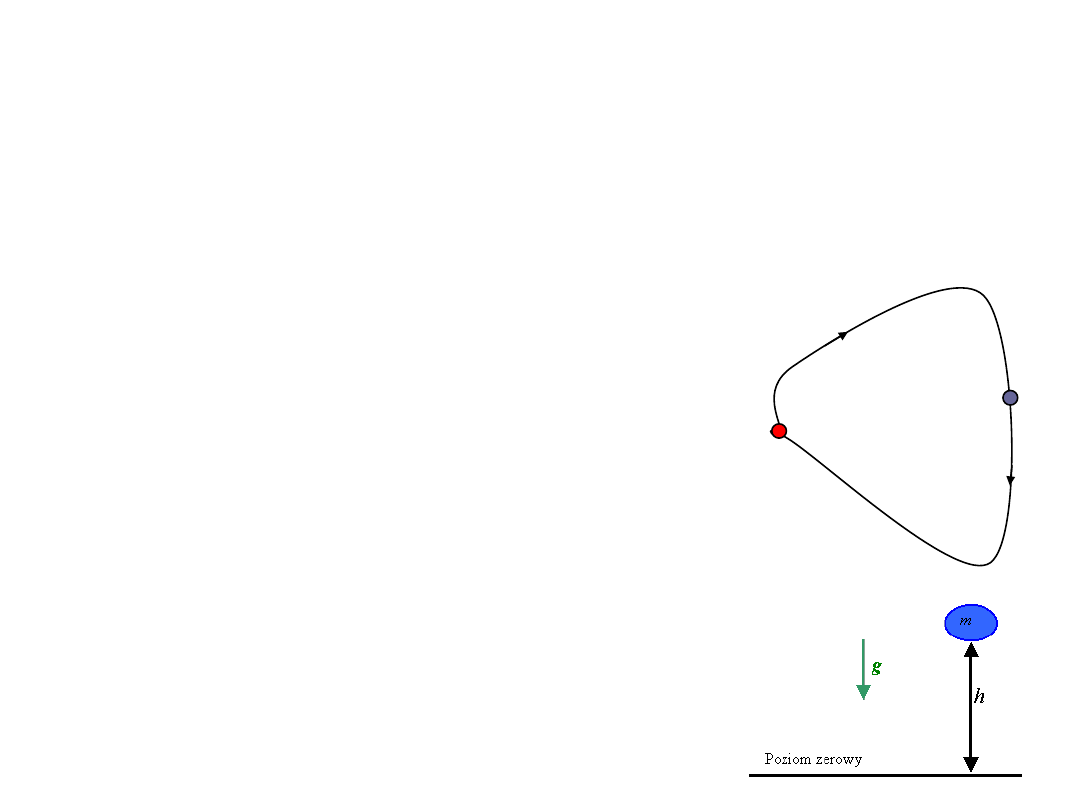
Energia potencjalna w jednorodnym polu grawitacyjnym
Energią potencjalną ciała w punkcie P względem punktu
O nazywamy pracę, jaką wykonuje siła zachowawcza
przy przesunięciu tego ciała od punktu P do punktu O
Grawitacyjną energię potencjalną określamy
jako pracę siły ciężkości mg na pionowym
torze o wysokości h:
O
1
2
P
Praca, moc, energia –
energia
Siłę nazywamy zachowawczą jeżeli praca wykonana przez nią nad punktem materialnym
poruszającym się między dwoma punktami zależy tylko od tych punktów, a nie od łączącej
je drogi.
Siła jest zachowawcza, jeżeli praca wykonana przez tę siłę nad punktem materialnym,
który porusza się po dowolnej drodze zamkniętej jest równa zeru
.
Energia potencjalna jest wielkością skalarem. Może
przybierad wartości ujemne.
Praca siły ciężkości
mg
na drodze
zamkniętej jest równa zeru.

Dynamika bryły sztywnej
• ruch obrotowy punktu materialnego,
• definicja bryły sztywnej,
• dynamika bryły sztywnej:
– ruch obrotowy,
– ruch obrotowo – postępowy,
–
moment bezwładności,
– II zasada dynamiki dla ruchu obrotowego,
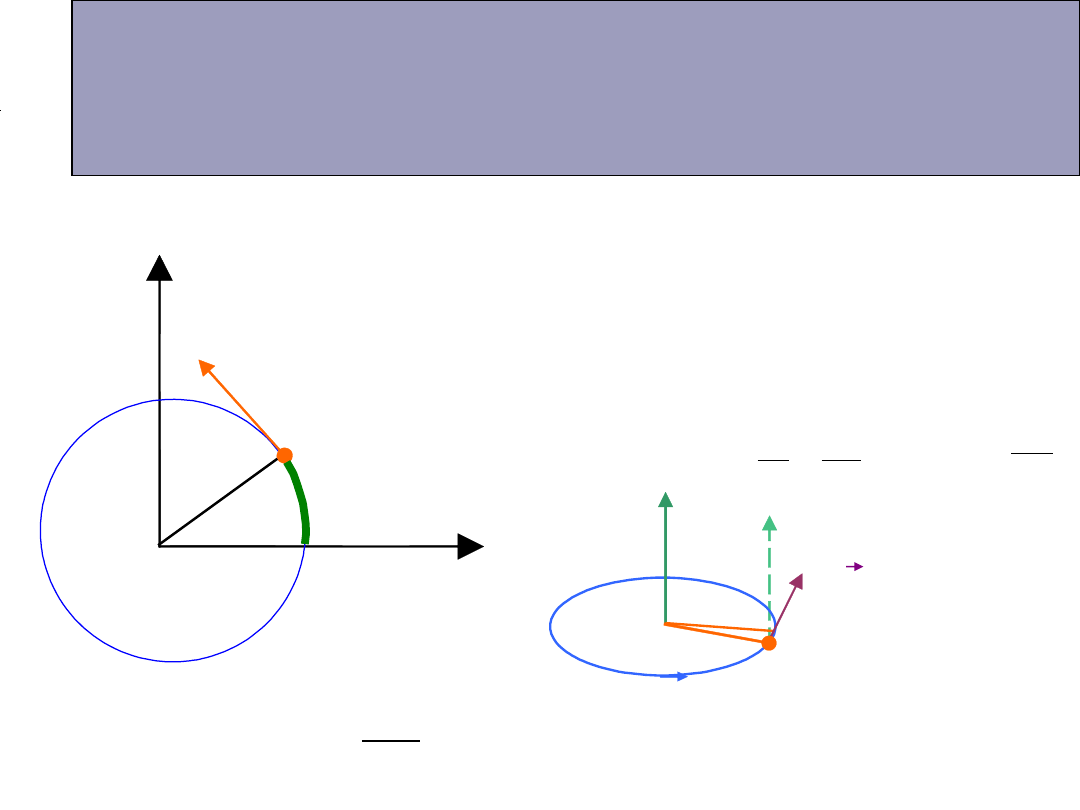
Ruch obrotowy punktu materialnego
•
ruch po okręgu -
szczególny przypadek płaskiego ruchu krzywoliniowego
r
s
x
y
v
A
•
droga kątowa –
położenie punktu A określamy za
pomocą kąta
r
s
•
droga liniowa –
wyraża za pomocą drogi kątowej
w sposób następujący:
•
prędkośd kątowa:
r
dt
d
dt
ds
dt
d
r
v
A
•
prędkośd liniowa punktu A:
r
kierunek wektora
dany jest przez
regułę śruby
prawoskrętnej
•
przyspieszenie kątowe:
dt
d
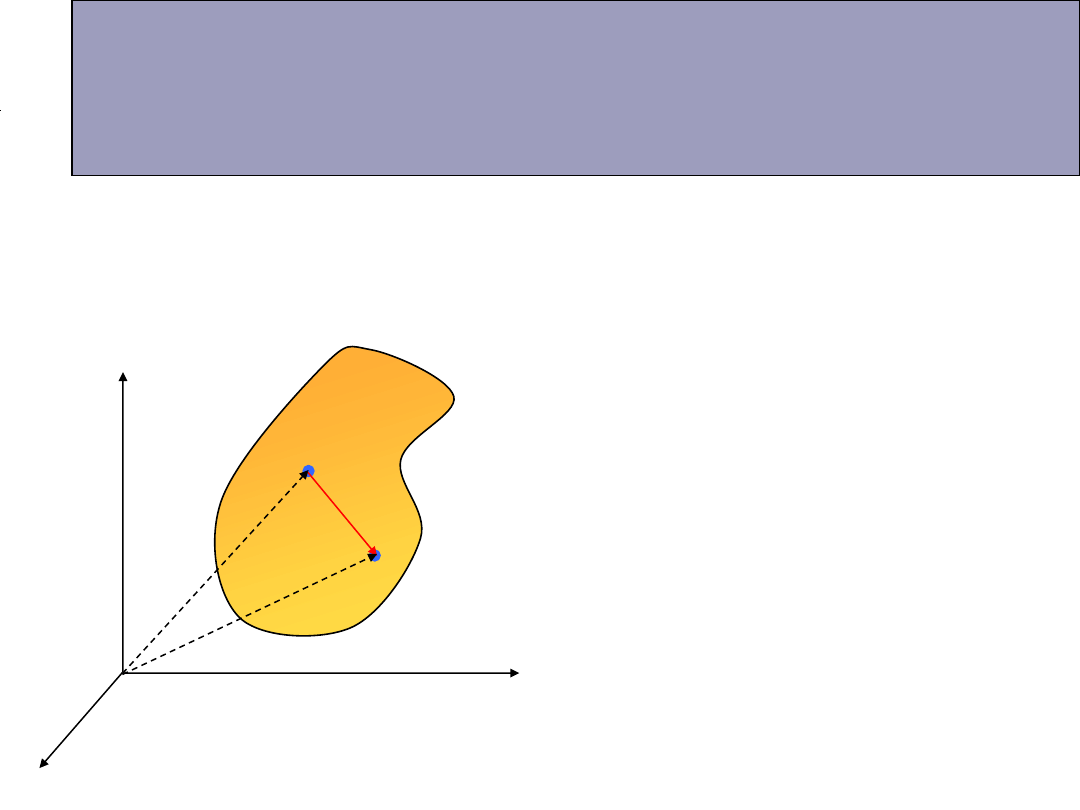
Dynamika bryły sztywnej
• Bryłą sztywną
nazywamy ciało stałe, w którym odległośd dwu
dowolnie wybranych punktów nie ulega zmianie, mimo działających na
to ciało sił.
x
z
y
m
1
m
2
i
r
ij
r
j
r
const
r
r
r
j
i
ij
|
|
|
|
• Ciałem sztywnym
nazywamy
takie ciało, w którym wszystkie
punkty mają zawsze względem
siebie stałe odległości.
Rodzaje ruchów bryły sztywnej
stopnie swobody:
f = 3
x
z
y
m
1
x
z
y
m
1
m
2
r
f = 2
jeden punkt unieruchomiony
dwa punkty unieruchomione
x
z
y
m
1
m
2
m
3
f = 1
Ciało sztywne swobodne ma
sześd stopni swobody!
Rodzaje ruchów bryły sztywnej
ruch postępowy:
wektory prędkości i przyspieszenia są takie same dla
wszystkich punktów,
x
y
z
dowolny odcinek łączący dwa punkty zachowuje stałe
położenie do siebie równoległe
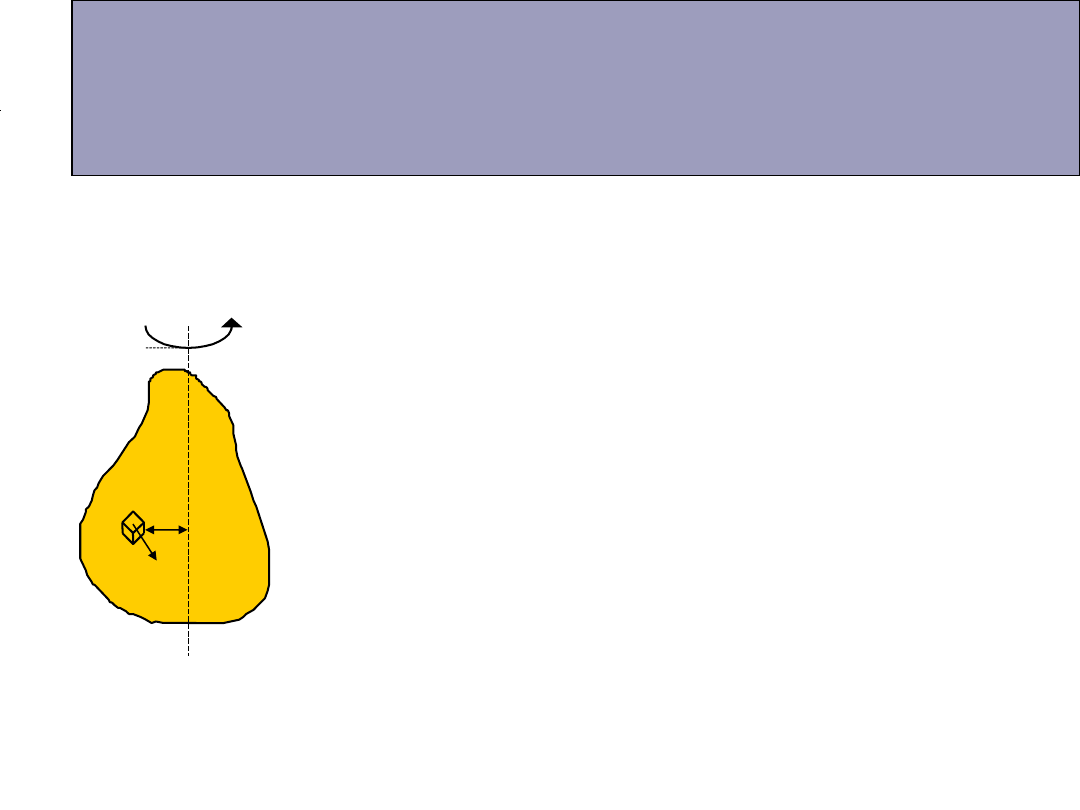
Rodzaje ruchów bryły sztywnej
ruch obrotowy:
wszystkie punkty poruszają się po okręgach, których
środki leżą na jednej prostej zwaną osią obrotu,
x
y
z
oś
poszczególne punkty bryły mają tę samą prędkośd kątową,
poszczególne punkty bryły mają różne prędkości liniowe,
zależne od odległości od osi obrotu.
Rodzaje ruchów bryły sztywnej
ruch postępowo – obrotowy:
ogólny ruch ciała sztywnego można złożyd z ruchu
postępowego i obrotowego
x
y
z
oś
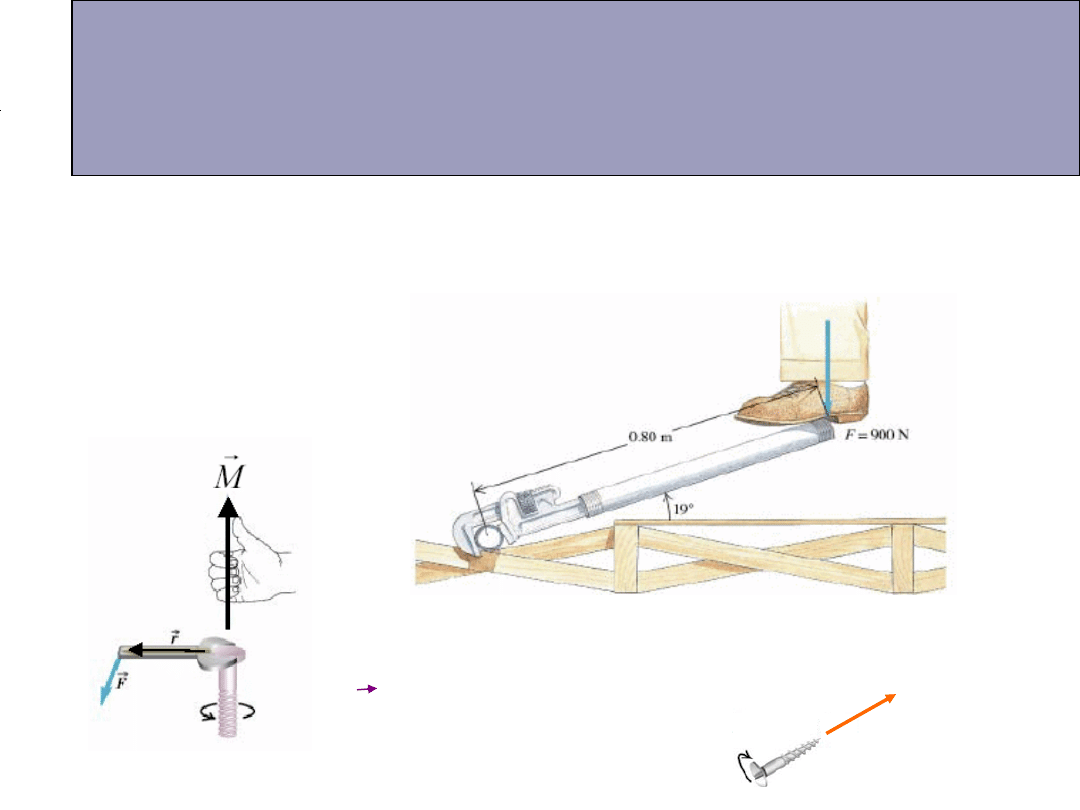
Moment siły
F
r
M
kierunek momentu sił wyznaczamy z reguły śruby
prawoskrętnej,
Wielkością fizyczną wywołującą obrót bryły sztywnej jest
moment siły
(tzw.
moment obrotowy
):
Aby spowodowad ruch obrotowy bryły sztywnej niezbędna jest siła.
r
nazywamy ramieniem siły,
M
gdy:
0
||
M
F
r
Moment bezwładności
podzielmy bryłę sztywną na zbiór
n
punktów materialnych
o masach
m
1
,
m
2
,….,
m
n
Przeanalizujmy ruch obrotowy bryły sztywnej wokół stałej osi ze stałą prędkością
kątową
i
m
i
v
i
r
odległości poszczególnych mas od osi obrotu wynoszą
r
1
, r
2
,…., r
n
momentem bezwładności
I
bryły sztywnej względem danej osi
nazywamy sumę iloczynów mas poszczególnych punktów bryły
sztywnej i kwadratów odległości od danej osi:
n
i
i
i
r
m
I
1
2
w przypadku bryły o ciągłym rozkładzie masy:
n
i
i
i
n
dm
r
r
m
I
1
2
2
lim
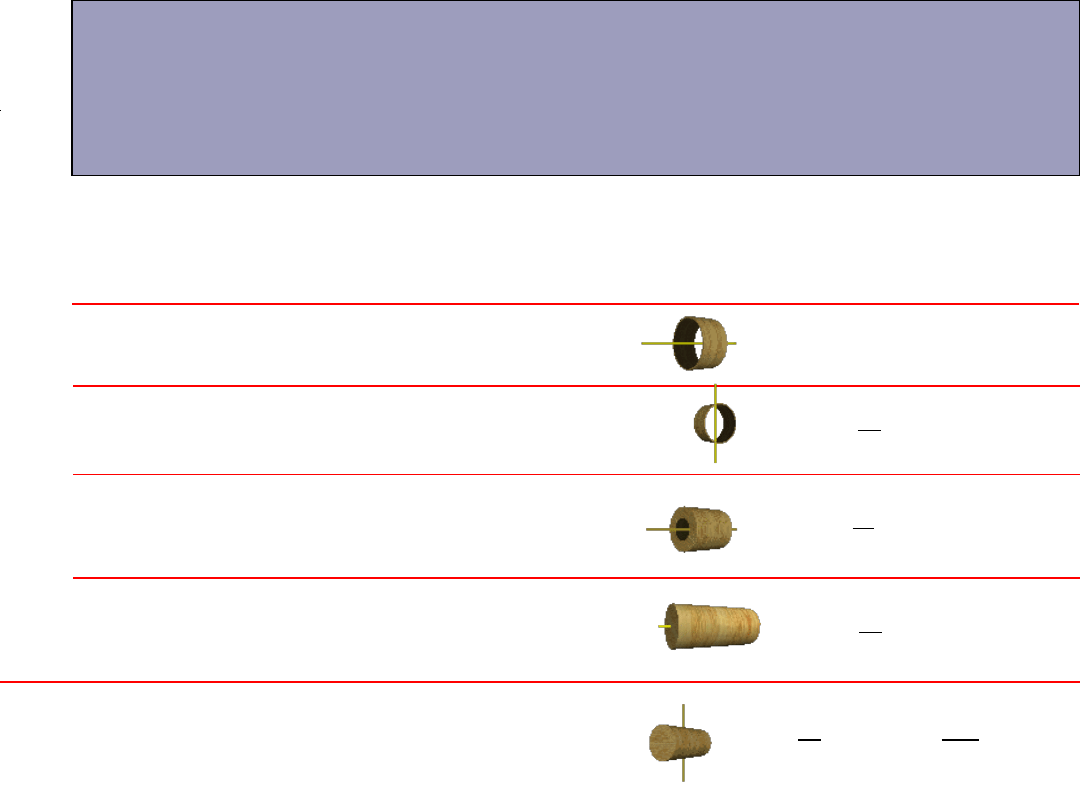
Moment bezwładności
- przykłady
2
2
2
1
2
1
r
r
m
I
2
r
m
I
moment bezwładności
I
jest analogiczną wielkością do masy
m
w ruchu
postępowym. Chociaż masa ciała nie zależy od jego położenia to moment
bezwładności zależy od osi, wokół której obraca się ciało:
cienki pierścieo o masie
m
i promieniu
r
obracający się wokół własnej osi:
pierścieo o masie
m
i promieniach
r
1
i
r
2
obracający się wokół własnej osi:
walec o masie
m
, długości
L
i promieniu
r
obracający się wokół własnej osi:
2
2
1
r
m
I
cienki pierścieo o masie
m
i promieniu
r
obracający się wokół osi prostopadłej:
2
2
1
r
m
I
walec o masie
m
, długości
L
i promieniu
r
obracający się wokół osi prostopadłej do
niego i przechodzącej przez środek:
2
2
12
1
4
1
L
m
r
m
I
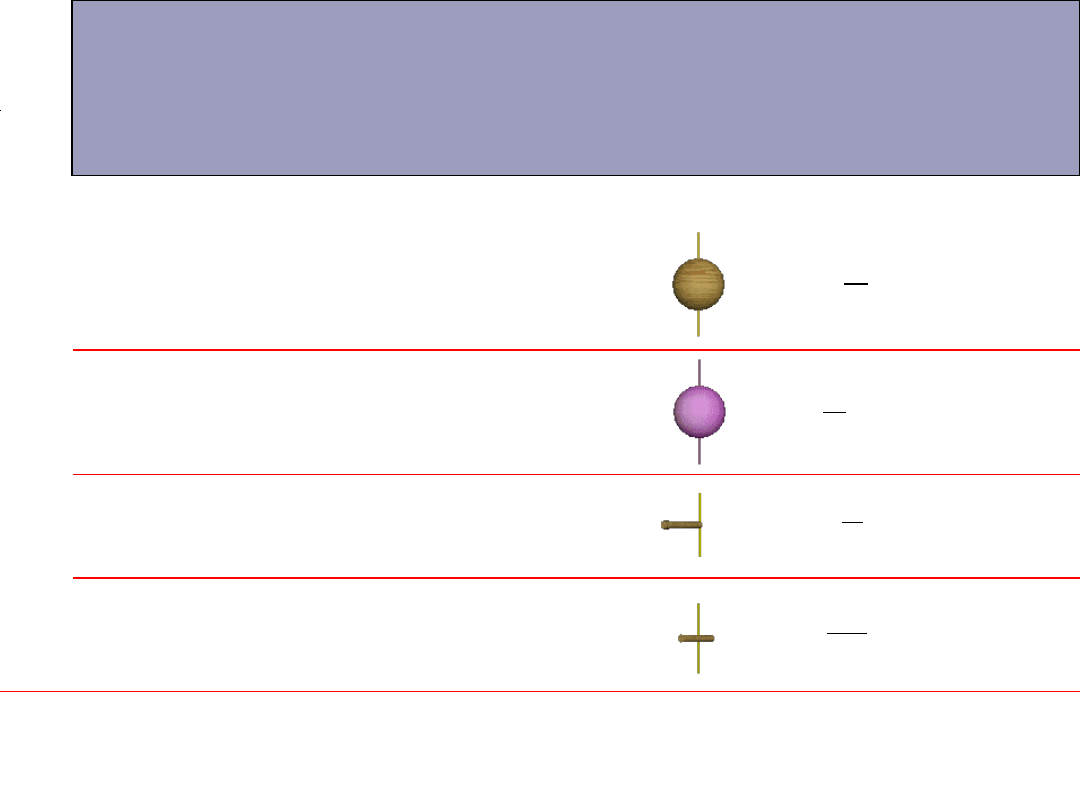
Moment bezwładności
- przykłady
2
3
2
r
m
I
2
12
1
L
m
I
2
5
2
r
m
I
kula o masie
m
i promieniu
r
obracająca się wokół własnej osi:
sfera o masie
m
i promieniu
r
obracająca się wokół własnej osi:
pręt o masie
m
i długości
L
obracający się wokół osi prostopadłej
do niego i przechodzącej przez jego koniec:
2
3
1
L
m
I
pręt o masie
m
i długości
L
obracający się wokół osi prostopadłej
do niego i przechodzącej przez jego środek:
jednostką momentu bezwładności
jest
2
1
m
kg
Twierdzenie Steinera
0
I
m
2
a
m
I
I
o
Moment bezwładności
I
bryły sztywnej względem danej osi jest równy sumie
momentu bezwładności
I
o
względem osi do niej równoległej, przechodzącej przez
środek
masy
bryły
oraz
iloczynu
masy
tej
bryły
i kwadratu odległości
a
obu osi:
a
II zasada dynamiki dla ruchu obrotowego
Przeanalizujmy ruch obrotowy bryły sztywnej wokół stałej osi
podzielmy bryłę sztywną na zbiór
n
punktów materialnych
o masach
m
1
,
m
2
,….,
m
n
,
odległości poszczególnych mas od osi obrotu wynoszą
r
1
, r
2
,…., r
n
,
i
m
i
F
i
r
na poszczególne masy
m
i
działają siły
F
i
stycznie do okręgów,
po których poruszają się punkty,
n
i
i
i
F
r
M
1
wypadkowy moment sił działający na bryłę sztywną jest równy:
podstawiając:
i
i
i
a
m
F
i
i
r
m
II zasada dynamiki dla ruchu obrotowego
Moment sił działających na bryłę sztywną jest
równy iloczynowi momentu bezwładności tej bryły
i jej przyspieszenia kątowego
i
m
i
F
i
r
n
i
i
i
i
r
m
r
M
1
i ostatecznie:
otrzymamy:
n
i
i
i
r
m
1
2
I
M
I
M
II zasada dynamiki dla ruchu obrotowego –
moment pędu (kręt)
i
m
i
v
i
r
Moment pędu
L
(kręt) –
punktu
materialnego o masie
m
i
i wektorze wodzącym
r
i
, poruszającego się z prędkością
v
i
względem osi obrotu definiujemy wzorem:
)
(
i
i
i
i
i
i
v
m
r
p
r
L
dla całej bryły możemy zapisad:
podstawiając:
n
i
i
i
i
v
m
r
L
1
r
v
n
i
i
i
i
r
m
r
1
n
i
i
i
m
r
1
2
I
I
L
10:36
II zasada dynamiki dla ruchu obrotowego –
moment pędu (kręt)
Pochodna momentu pędu bryły względem czasu jest
równa momentowi siły działającej na bryłę sztywną
II zasadę dynamiki możemy zapisad:
I
M
dt
d
I
dt
I
d
)
(
dt
L
d
M
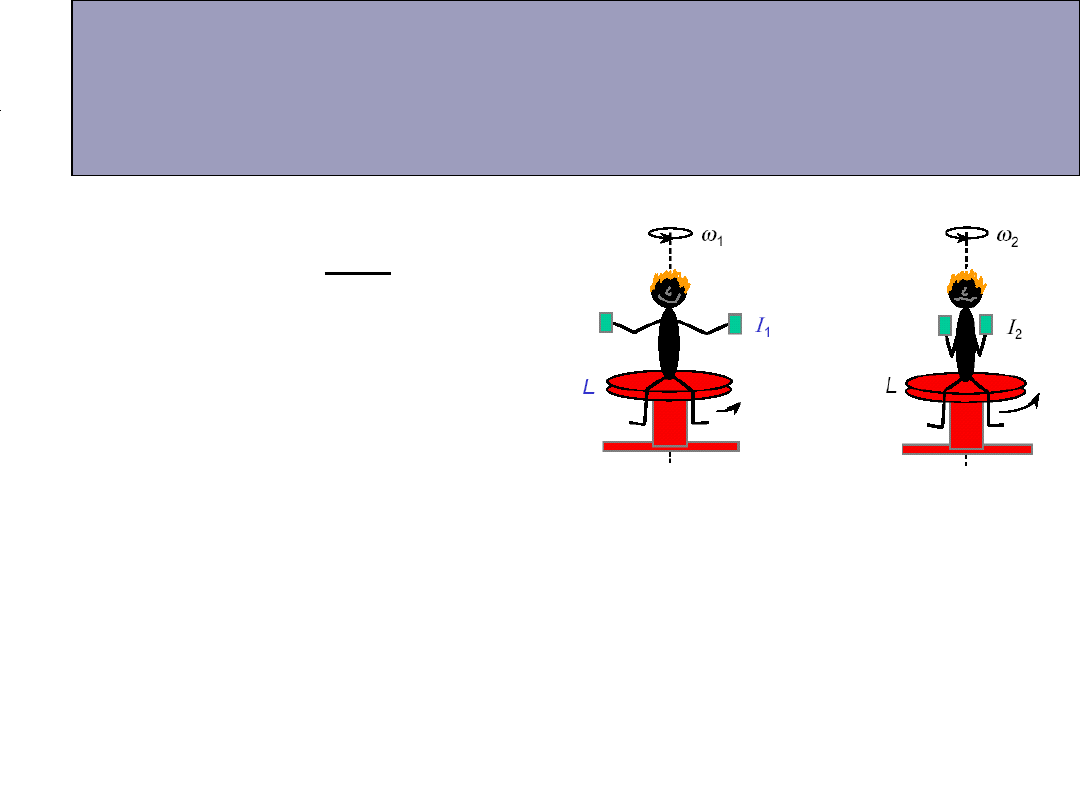
Zasada zachowania momentu pędu
(krętu)
0
M
const
L
Jeżeli moment wypadkowy sił
zewnętrznych działających
na bryłę równa się zeru,
to całkowity moment pędu
(kręt) pozostaje stały.
dt
L
d
M
moment sił zewnętrznych wynosi zero,
moment pędu jest zachowany,
2
2
1
1
I
I
ponieważ:
2
1
I
I
zatem:
1
2
zmniejszenie momentu bezwładności
przyspiesza obrót:
Energia kinetyczna ruchu obrotowego
2
2
2
2
1
2
1
i
i
i
i
ki
r
m
v
m
E
n
i
i
i
r
m
1
2
2
2
1
Energię kinetyczną –
obliczamy sumując energie kinetyczne
poszczególnych punktów bryły:
dla całej bryły mamy zatem:
n
i
i
i
k
r
m
E
1
2
2
2
1
2
2
1
I
E
k
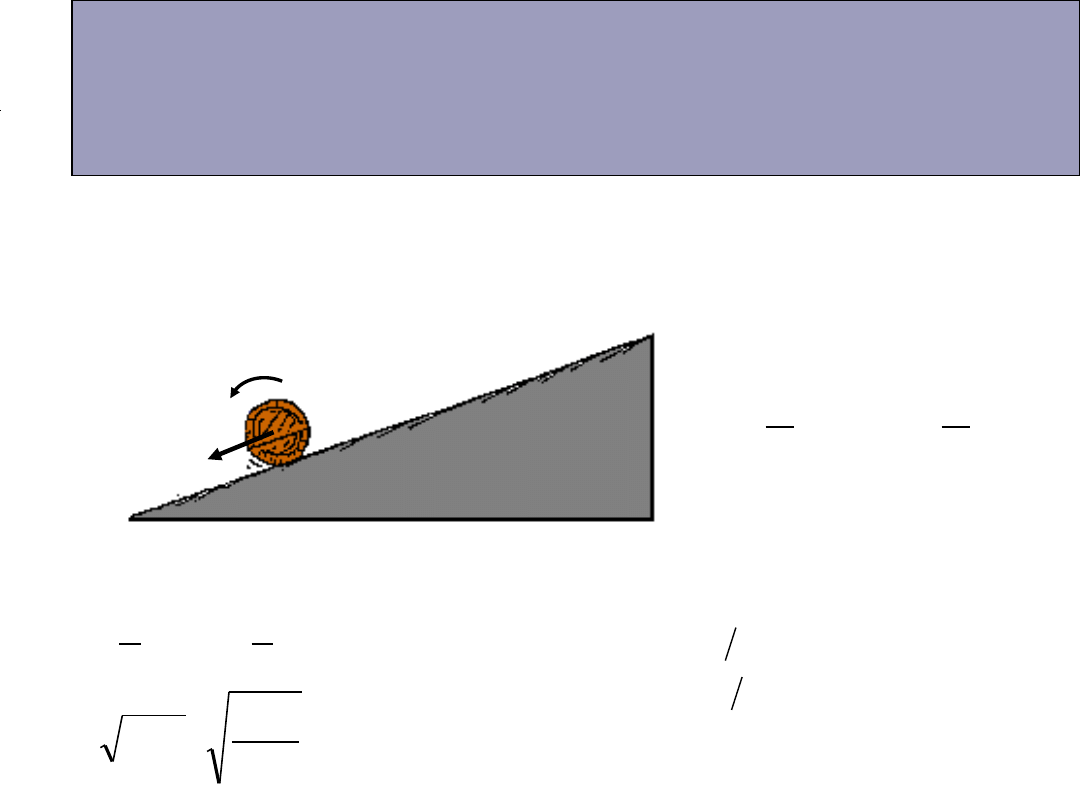
Energia kinetyczna ruchu postępowo –
obrotowego
v
m
1
1
2
c
gh
v
k
Energia kinetyczna
obracającej się bryły jest sumą energii kinetycznej
ruchu obrotowego i energii kinetycznej środka masy:
jeżeli wysokośd równi wynosi
h
, a promieo ciała
r
, to obliczmy prędkośd ciała
u podstawy równi:
2
2
2
1
2
1
I
v
m
E
k
2
2
2
1
2
1
k
k
I
v
m
mgh
2
r
m
c
I
r
v
kula
5
2
,
walec
2
1
ściance
cienkiej
o
rura
1
c
10:36
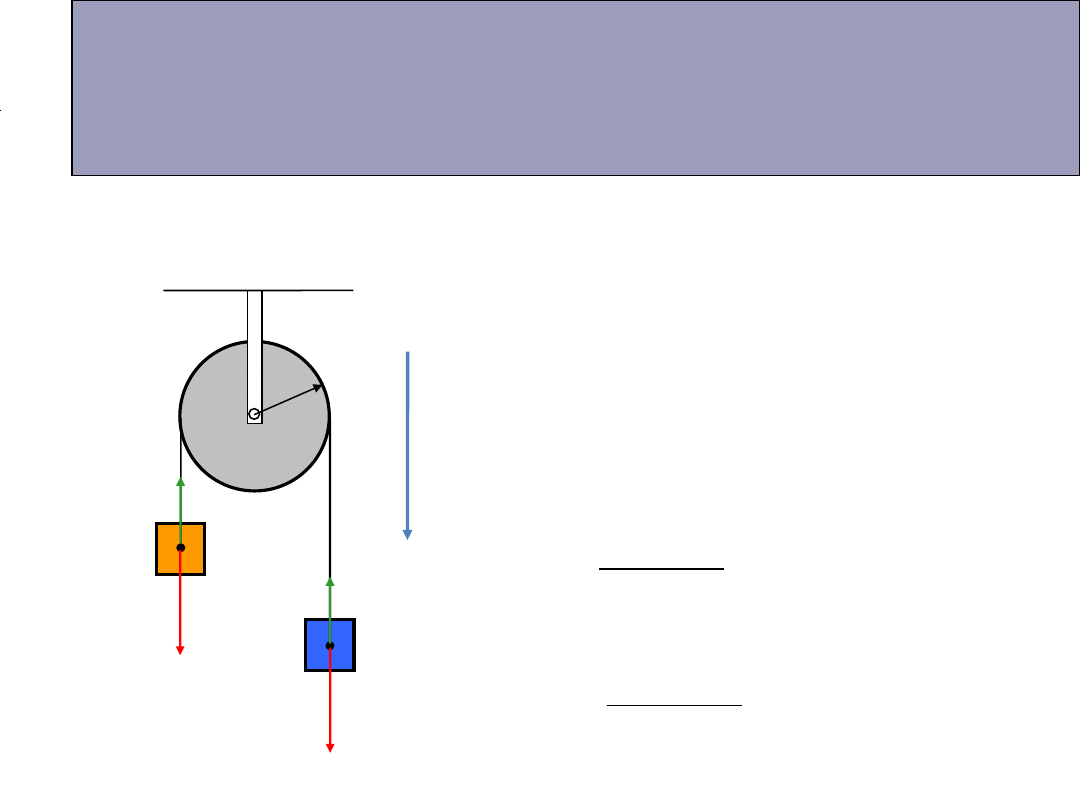
Przykłady – maszyna Atwooda
g
m
1
g
m
2
N
obliczmy przyspieszenie, z jakim poruszają się masy oraz naciąg nici:
bloczek nieruchomy:
g
m
N
a
m
1
1
m
1
m
2
m
r
N
a
N
g
m
a
m
2
2
g
m
m
a
m
m
)
(
)
(
1
2
2
1
g
m
m
m
m
a
2
1
1
2
g
m
m
m
m
N
2
1
2
1
2
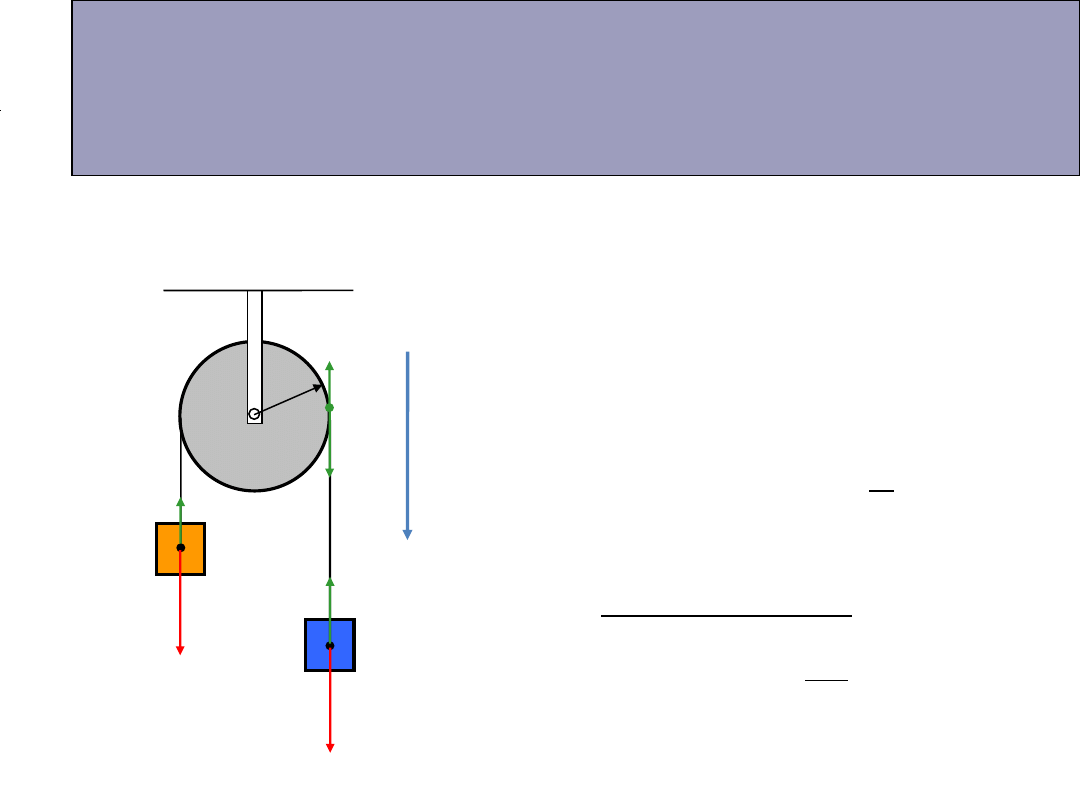
Przykłady – maszyna Atwooda
g
m
1
g
m
2
2
N
obliczmy przyspieszenie, z jakim poruszają się masy oraz naciąg nici:
bloczek ruchomy:
g
m
N
a
m
1
1
1
m
1
m
2
m
r
1
N
a
2
2
2
N
g
m
a
m
g
m
m
m
m
m
a
2
2
1
1
2
......
1
N
2
N
1
N
I
N
N
r
M
)
(
1
2
......
2
N
r
a
I
I
N
N
r
)
(
1
2
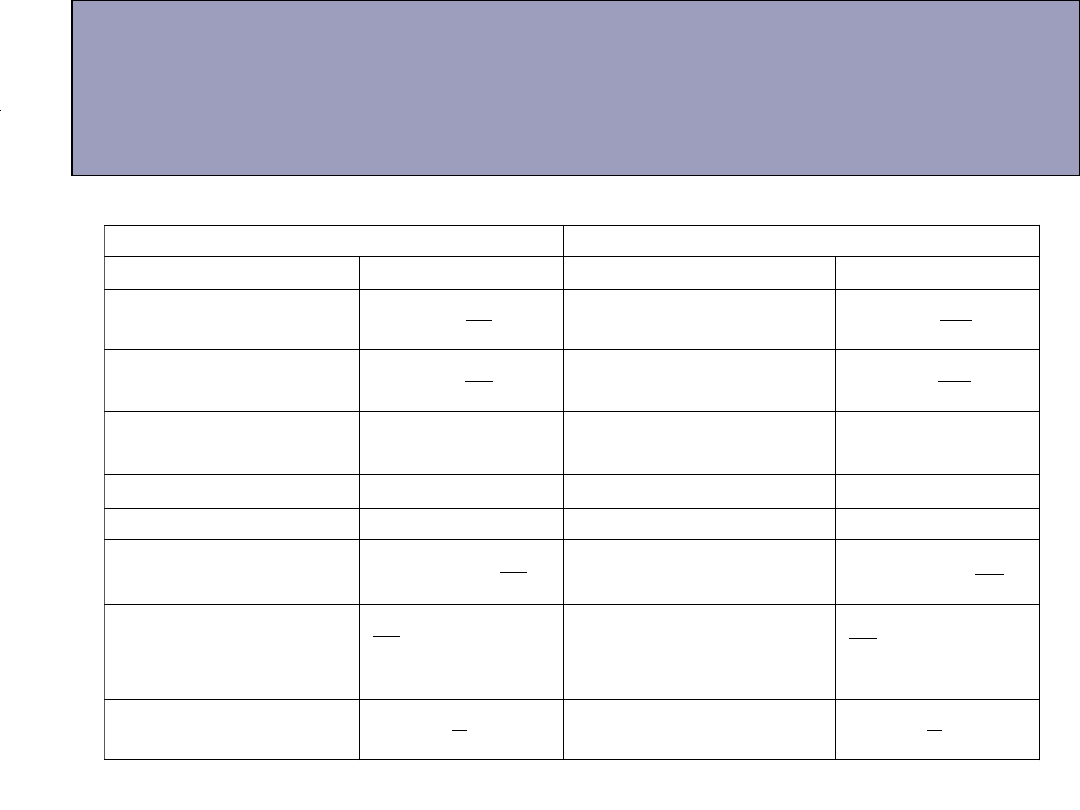
Analogia między ruchem postępowym i
obrotowym
Ruch prostoliniowy
Ruch obrotowy
Droga liniowa
s
Droga kątowa
Prędkość liniowa
dt
s
d
v
Prędkość kątowa
dt
d
Przyspieszenie
liniowe
dt
v
d
a
Przyspieszenie
kątowe
dt
d
Masa
m
Moment
bezwładności
I
Pęd
v
m
p
Moment pędu
I
L
Siła
F
Moment siły
M
II zasada dynamiki
dt
p
d
a
m
F
II zasada dynamiki
dt
L
d
I
M
Zasada
zachowania pędu
const
p
dt
p
d
0
Zasada zachowania
momentu pędu
const
L
dt
L
d
0
Energia kinetyczna
2
2
1
v
m
E
k
Energia kinetyczna
2
2
1
I
E
k
11:19
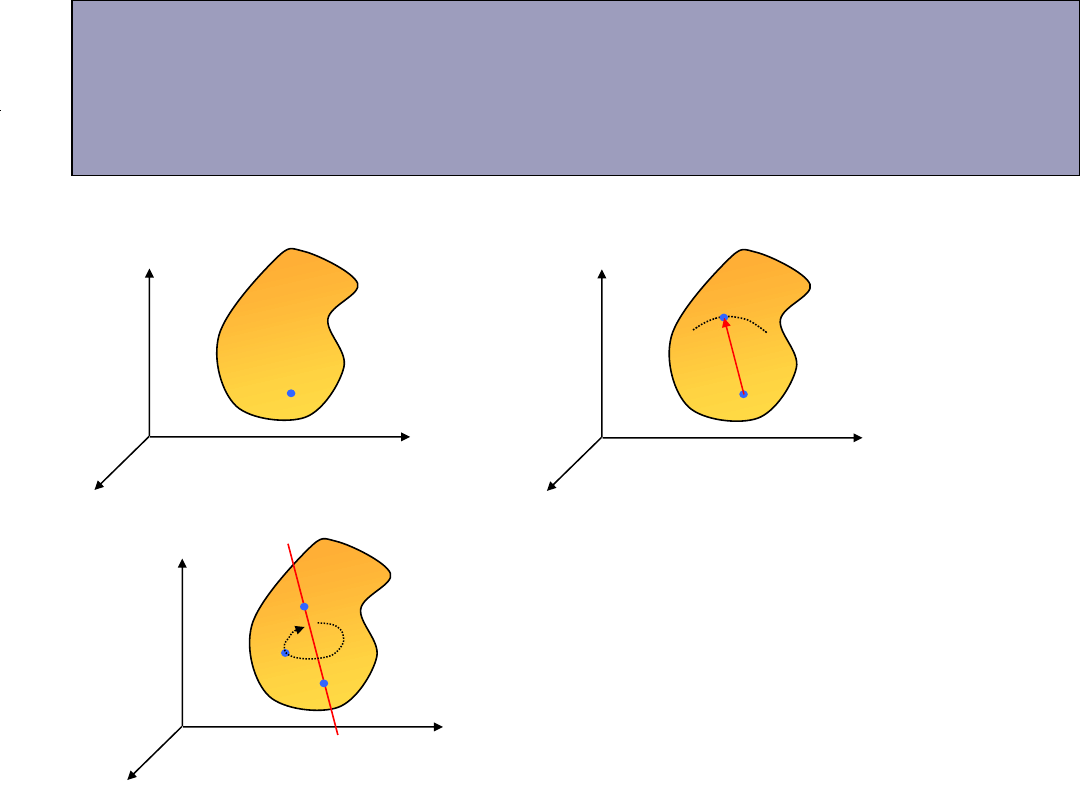
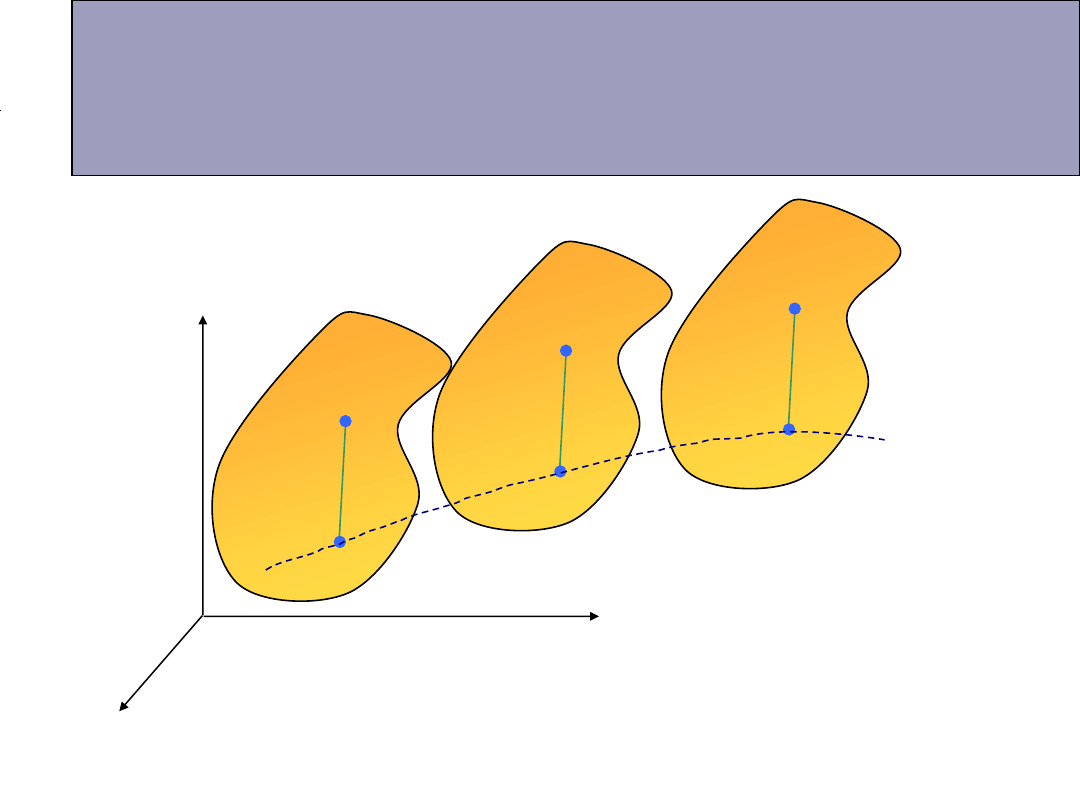
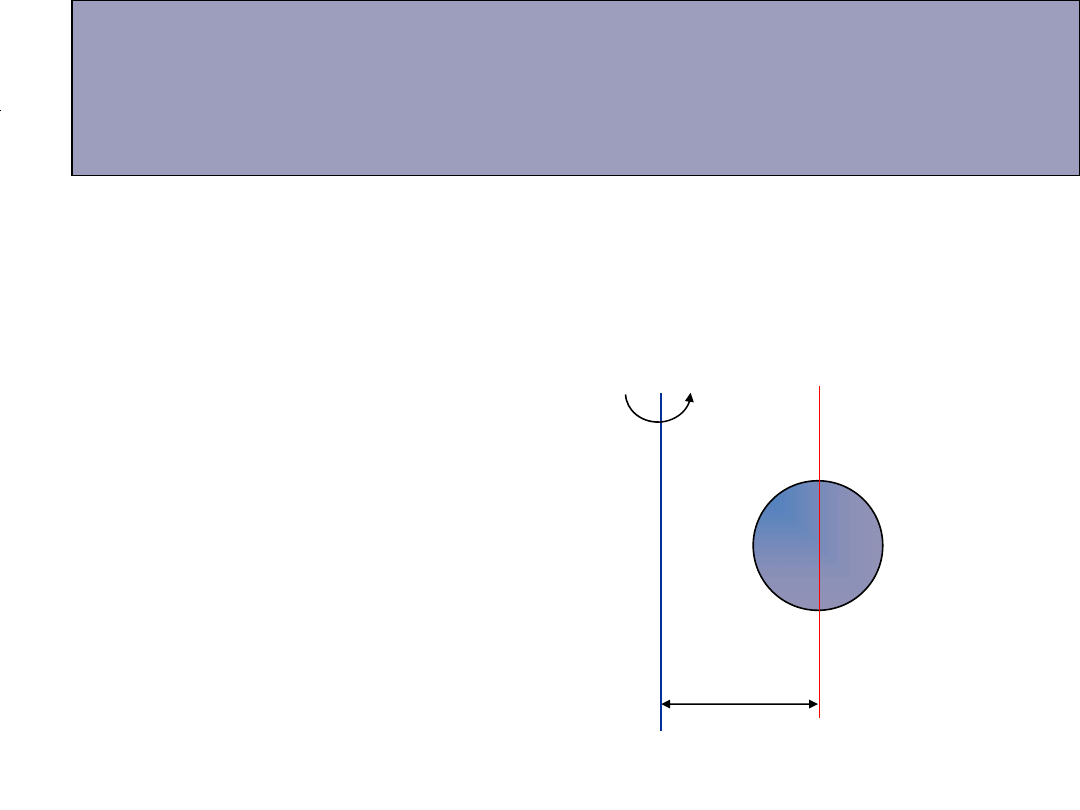
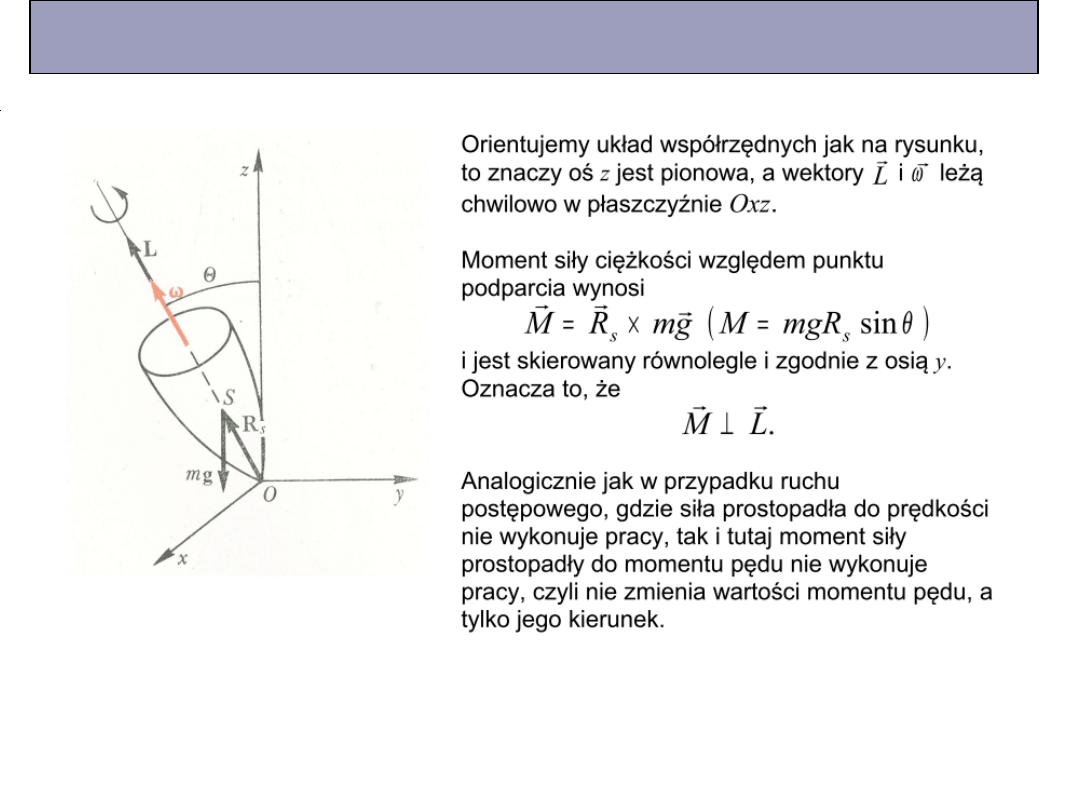
Precesja
Precesja lub ruch precesyjny –
zjawisko zmiany kierunku osi
obrotu obracającego się ciała. Oś
obrotu sama obraca się wówczas
wokół pewnego kierunku w
przestrzeni zakreślając
powierzchnię boczną stożka.
11:19
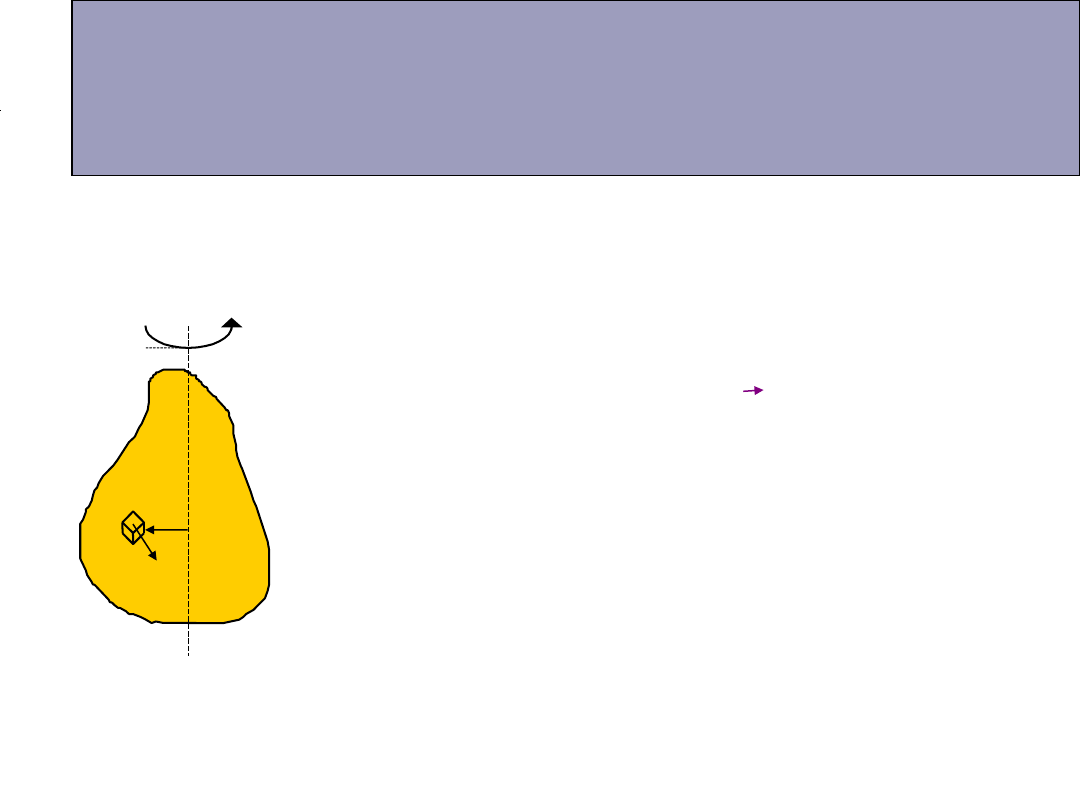
Precesja
Precesja przy nieobecności sił zewnętrznych
Precesja występuje w przypadku swobodnie obracającej się bryły, gdy na ciało nie
działają żadne siły zewnętrzne. Dzieje się tak wówczas, gdy oś, wokół której obraca
się bryła nie jest jej osią główną.
11:19
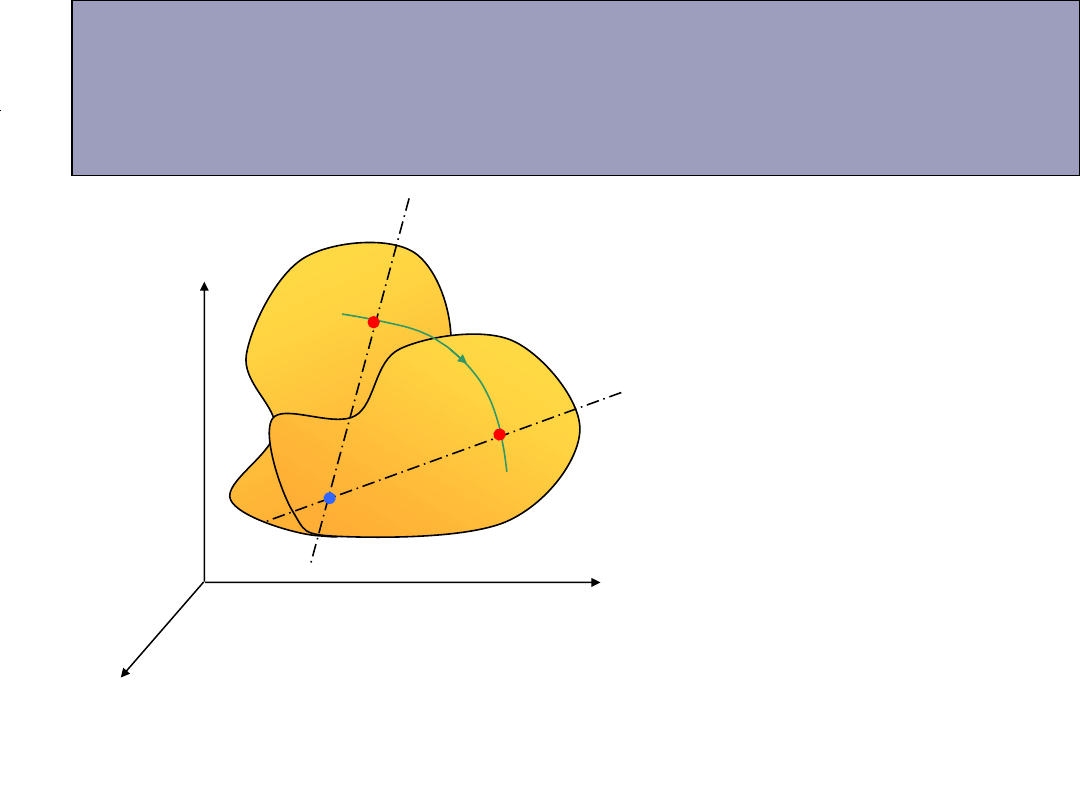
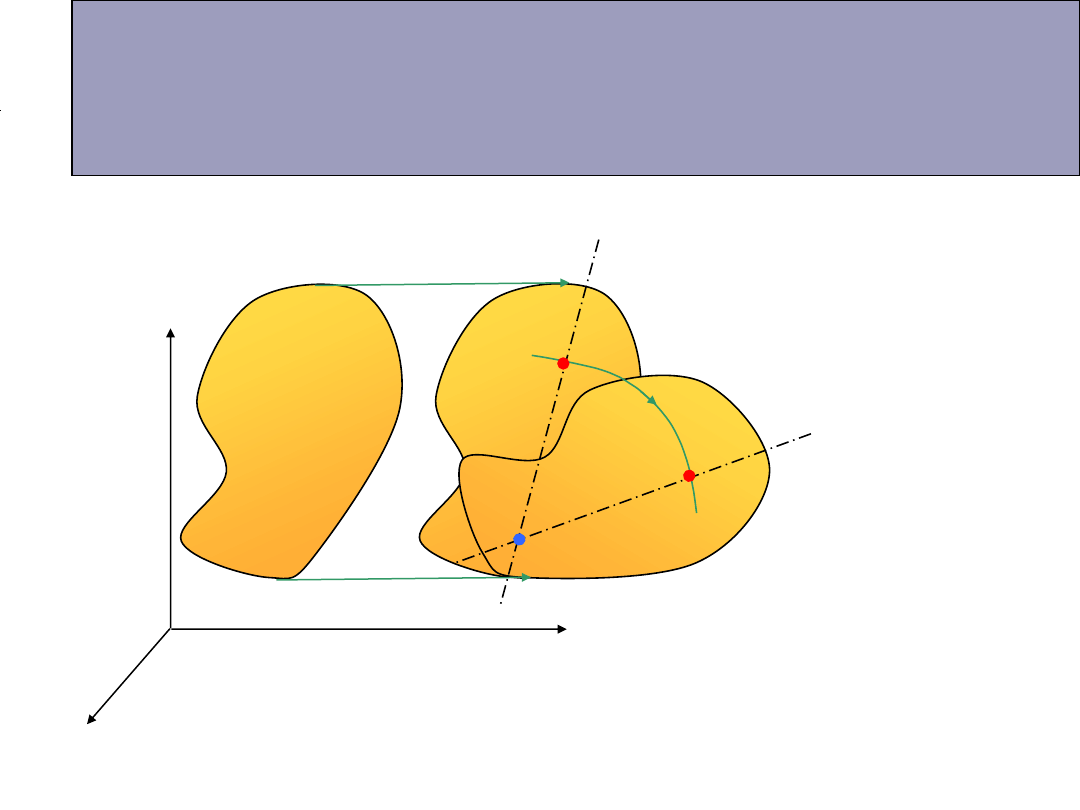
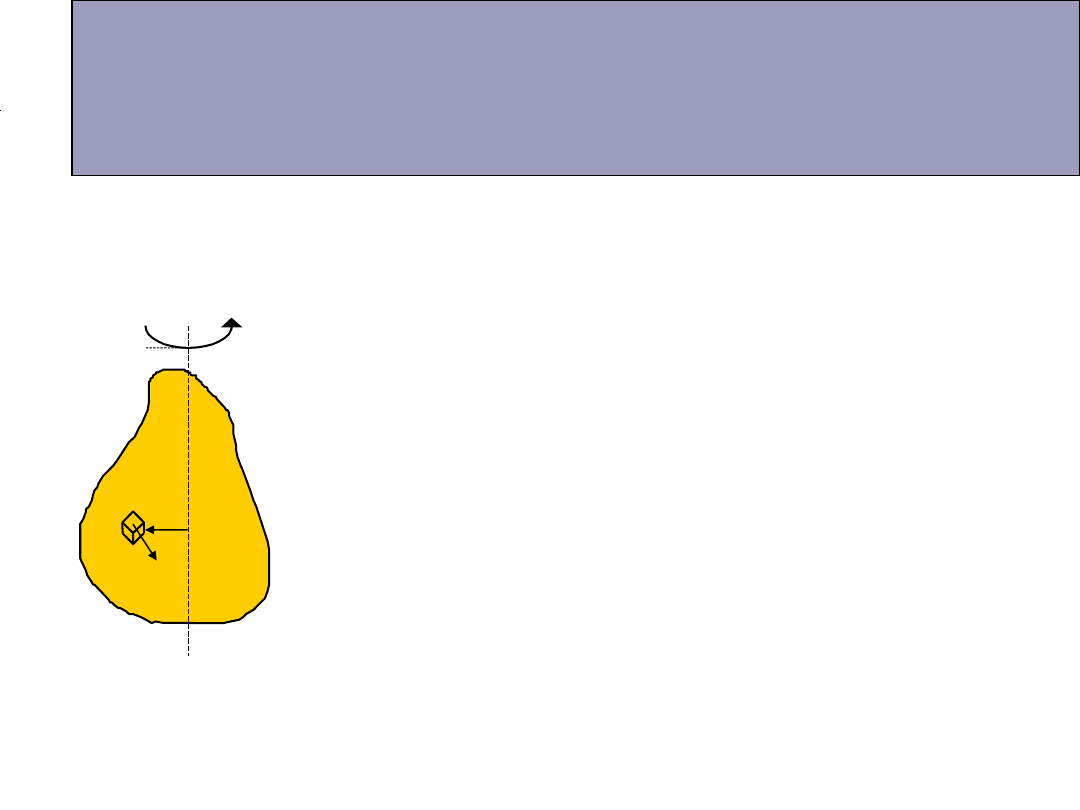
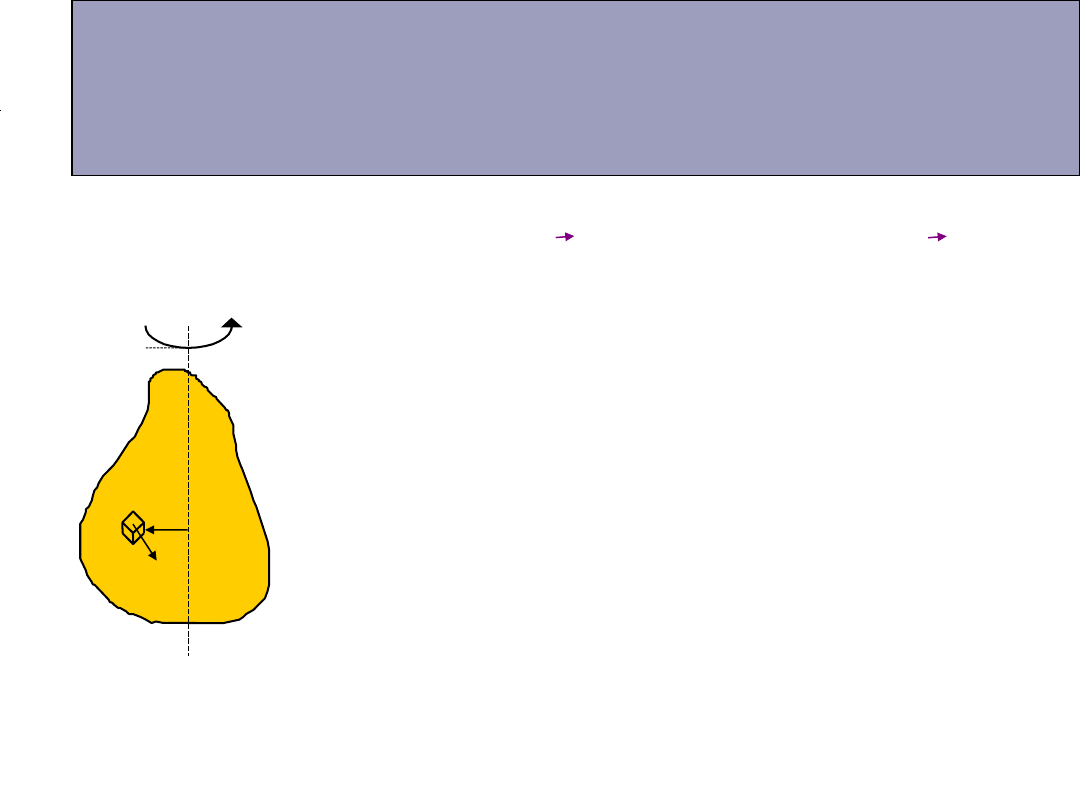
Precesja
Precesja wymuszona
Precesja wymuszona występuje wówczas, gdy ciało obracające
się dookoła osi zostanie poddane momentowi siły ze składową
prostopadłą do momentu pędu ciała. Wtedy oś obrotu ciała
wykonuje ruch kreśląc sobą powierzchnię w kształcie bocznej
powierzchni stożka.
Zjawisko to może byd zaobserwowane na przykładzie
wirującego bąka, gdy oś bąka nie jest pionowa przyciąganie
ziemskie stara się przewrócid bąka, ale bąk nie przewraca się,
a charakterystycznie zatacza się, co jest właśnie precesją. W
ten sposób precesja powoduje stabilnośd wirujących ciał.
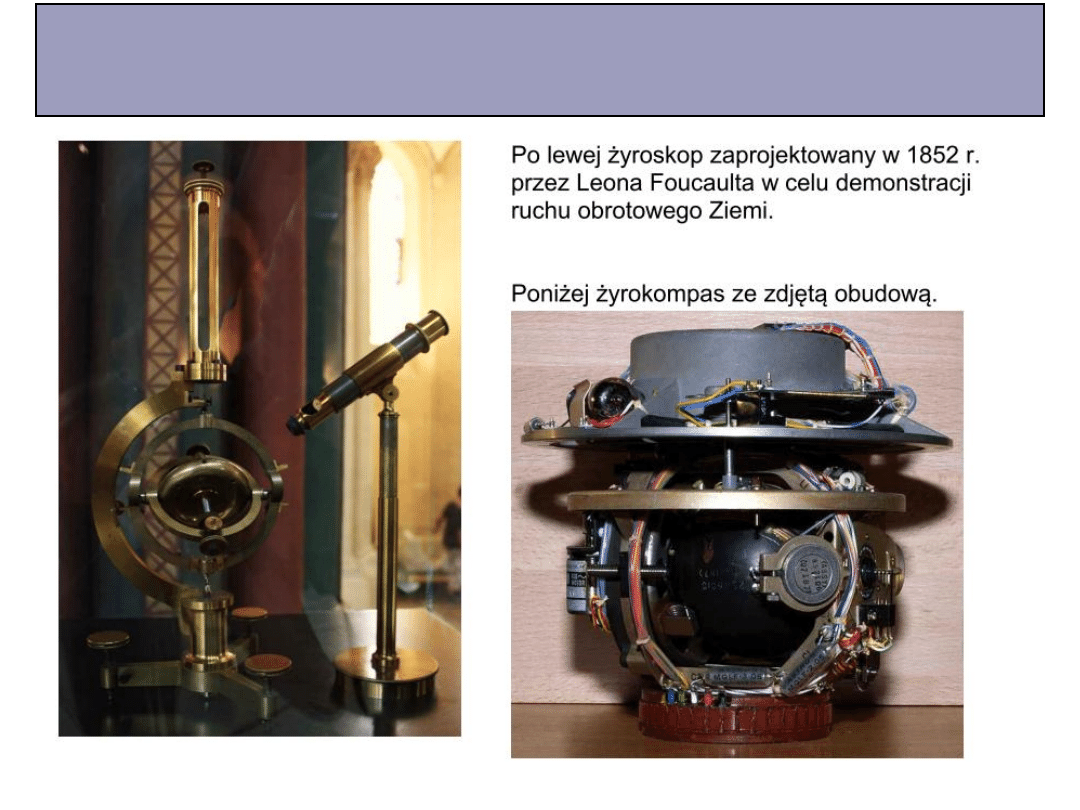
Dzięki precesji działają również żyrokompasy.
11:19
Precesja
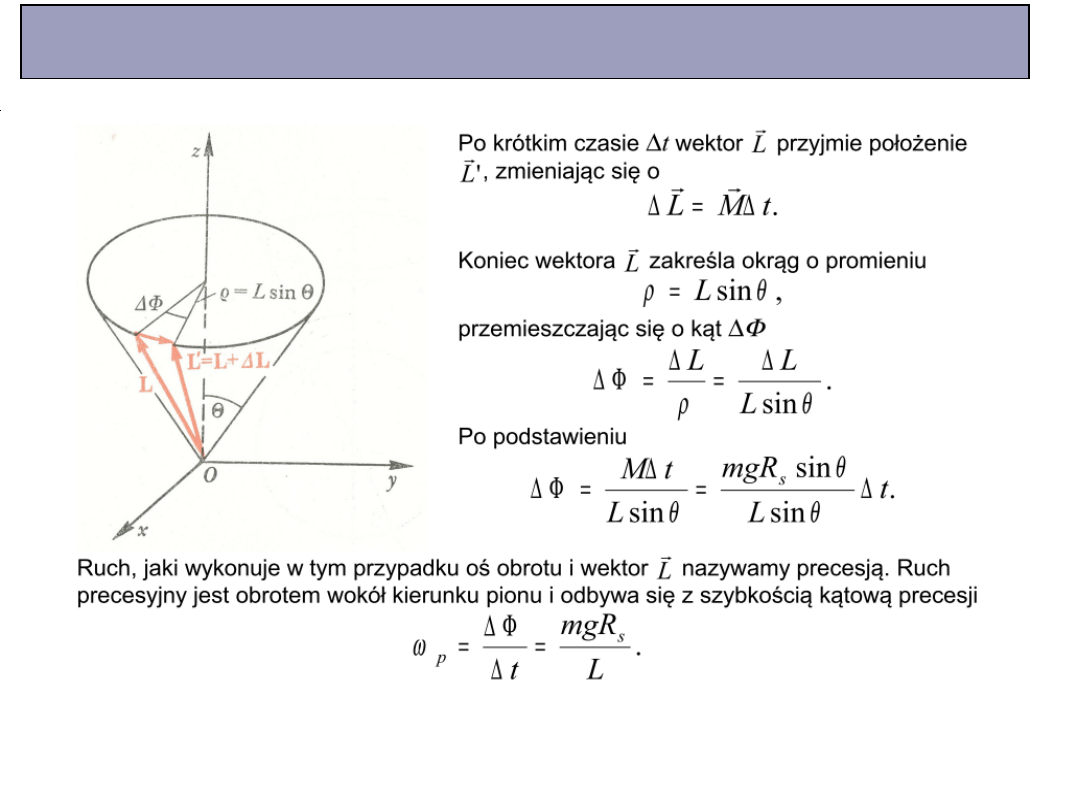
11:19
Precesja

11:19
Precesja
Prędkośd precesji można zmniejszyd zmniejszając
wartośd momentu siły i zwiększając
moment pędu przez rozpędzenie ciała do większej
prędkości kątowej.
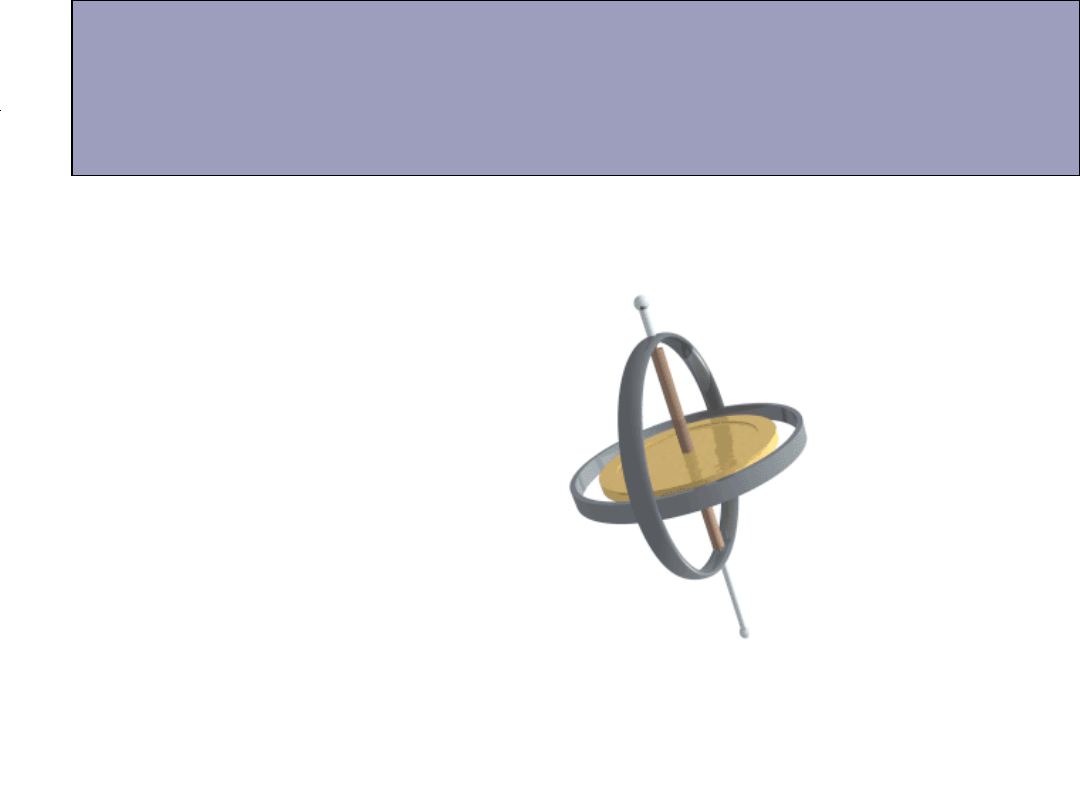
Stosując zawieszenie Cardana i dobre łożyska
można praktycznie wyeliminowad moment siły
działający na wirujący bąk i straty energii
wywołane tarciem.
Moment pędu tak zawieszonego bąka nie
powinien się zmieniad, czyli zachowywad stały
kierunek w przestrzeni, niezależnie od położenia
obudowy.
Taka konstrukcja nazywa się żyroskopem.
Animacja działania żyroskopu
11:19
Żyroskop
Skutecznośd żyroskopu spada wraz z
zmniejszeniem się prędkości obrotowej
Żyroskop

11:19
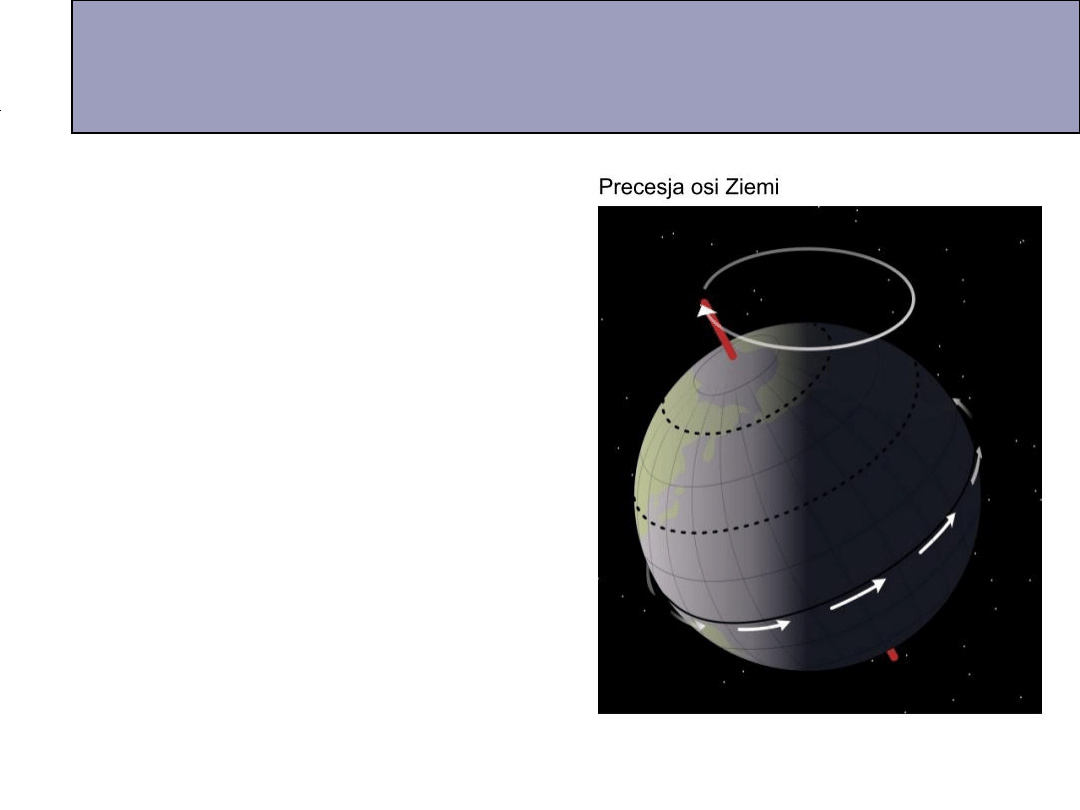
Precesja osi Ziemi
Precesja osi Ziemi została odkryta przez Hipparcha w 130 roku p.n.e. Jest to data
akceptowana przez tradycyjną, akademicką interpretację historii. Zjawisko precesji było
znane i obserwowane już w starożytnym Sumerze, a potem Egipcie.
Jest to zjawisko przejawiające się wykonywaniem przez oś Ziemi ruchu po powierzchni
bocznej stożka. Innymi słowy, oś ziemska kreśli na tle nieba okrąg. Zakreślenie pełnego
okręgu trwa 25 920 lat.
Zjawisko to jest wywołane przez oddziaływanie grawitacyjne ze strony Księżyca i Słooca. Oś
obrotu Ziemi nie jest prostopadła do jej płaszczyzny obiegu wokół Słooca (ekliptyki), ale
pochylona pod kątem ok. 23,5°. Jednocześnie Ziemia nie jest kulą. Jest spłaszczona na
biegunach, stąd jej moment bezwładności względem osi obrotu jest większy niż dla kuli. W
rezultacie jej oś obrotu porusza się po powierzchni bocznej stożka, nie zachowując stałego
położenia w przestrzeni.
11:19
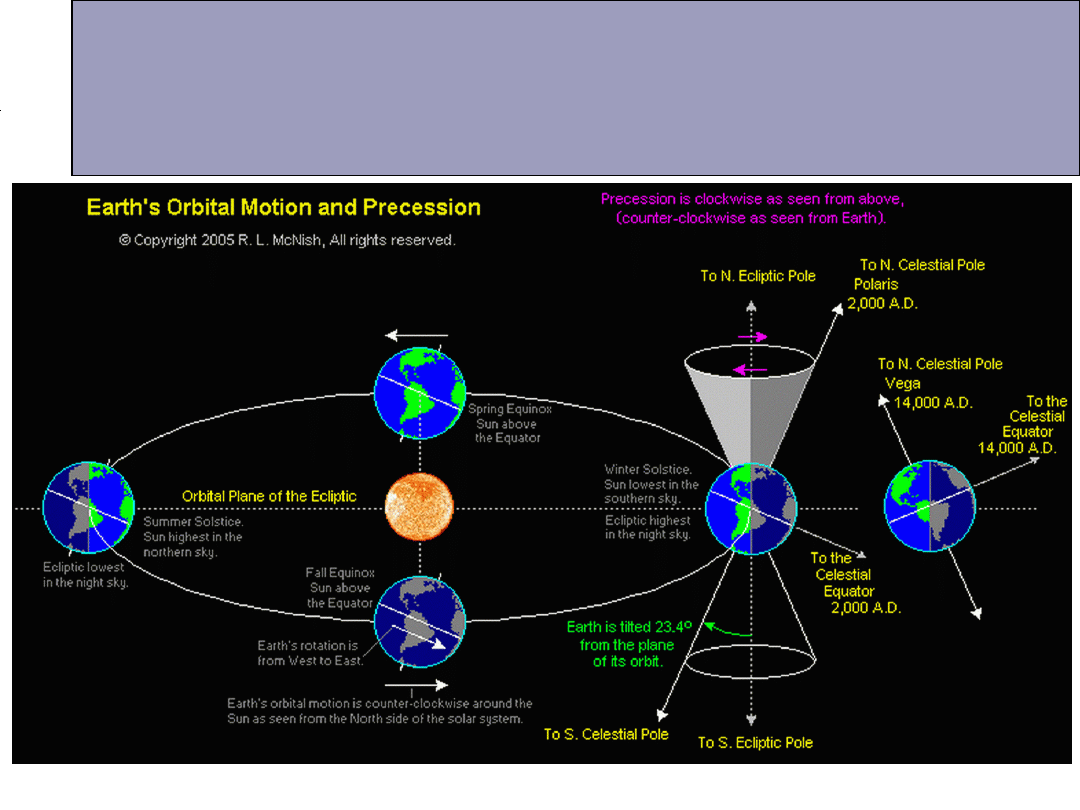
Skutkiem precesji Ziemi jest to, że równik
niebieski wędruje po ekliptyce z prędkością 1°
na 72 lata, a biegun niebieski zakreśla wokół
bieguna ekliptyki okrąg o promieniu 23,5°.
Dlatego też Gwiazda Polarna nie zawsze była na
biegunie nieba. Za 11 tysięcy lat będzie tam się
znajdowad Wega. Podobnie przesuwa się po
ekliptyce punkt Barana, inaczej zwany punktem
równonocy wiosennej. Precesja powoduje
również różnicę między rokiem gwiazdowym a
rokiem zwrotnikowym.
Precesja osi Ziemi
11:19
Precesja osi Ziemi
Wyszukiwarka
Podobne podstrony:
Fizyka INF 5 2011(1)
Fizyka INF 1 2011
Fizyka INF 8 2011
Fizyka INF 4 2011
Fizyka INF 2 2011
Fizyka INF 9 2011
Fizyka INF 6 2011
Fizyka INF 4 2011(1)
29 sprawozdanie, Politechnika Rzeszowska, Fizyka Sprawozdania, prz inf 2011
Ćw 4 Fizyka, Politechnika Rzeszowska, Fizyka Sprawozdania, prz inf 2011
SPRAWOZDANIE 45, Politechnika Rzeszowska, Fizyka Sprawozdania, prz inf 2011
FIZYKA 2002 2011
FIZYKA 2002 2011
Fizyka Wsp 2011
Tech Inf 2011 temat 2, UG, UG1, Technologia Informacyjna
fizyka budowli I 2011, politechnika lubelska, budownictwo, 3 rok, semestr 5, fizyka budowli, laborat
fizyka pr 2011
więcej podobnych podstron