„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Zbigniew Eliasz
Stosowanie sterowników i komputerów w automatyce
731[01].Z1.02
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
mgr inż. Roman Grobelny
mgr inż. Dariusz Główczak
Opracowanie redakcyjne:
mgr inż. Zbigniew Eliasz
Konsultacja:
mgr inż. Ryszard Dolata
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 731[01].Z1.02
„Stosowanie sterowników i komputerów w automatyce”, zawartego w modułowym
programie nauczania dla zawodu mechanik automatyki przemysłowej i urządzeń
precyzyjnych
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1. Wprowadzenie
3
2. Wymagania wstępne
5
3. Cele kształcenia
6
4. Materiał nauczania
7
4.1. Oznaczenia i symbole stosowane na sterownikach i w dokumentacji
technicznej oraz budowa i parametry elektryczne sterowników
7
4.1.1. Materiał nauczania
7
4.1.2. Pytania sprawdzające
13
4.1.3. Ćwiczenia
13
4.1.4. Sprawdzian postępów
14
4.2. Zasada działania sterownika i jego parametry elektryczne
15
4.2.1. Materiał nauczania
15
4.2.2. Pytania sprawdzające
17
4.2.3. Ćwiczenia
17
4.2.4. Sprawdzian postępów
24
4.3. Elektryczne układy wykonawcze współpracujące ze sterownikami
25
4.3.1. Materiał nauczania
25
4.3.2. Pytania sprawdzające
34
4.3.3. Ćwiczenia
34
4.3.4. Sprawdzian postępów
37
4.4. Zabezpieczenia instalacji elektrycznych i układów elektronicznych
stosowane przy sterownikach
38
4.4.1. Materiał nauczania
38
4.4.2. Pytania sprawdzające
42
4.4.3. Ćwiczenia
42
4.4.4. Sprawdzian postępów
47
4.5. Komputerowe
wspomaganie
projektowania
systemów
z
zastosowaniem sterowników
48
4.5.1. Materiał nauczania
48
4.5.2. Pytania sprawdzające
54
4.5.3. Ćwiczenia
54
4.5.4. Sprawdzian postępów
57
5. Sprawdzian postępów
58
6. Literatura
64

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik ten będzie Ci służył pomocą podczas przyswajania wiedzy z zakresu stosowania
sterowników i komputerów w automatyce. Musisz jednak wiedzieć, że na świecie istnieje
wiele firm produkujących sterowniki różniące się nieco między sobą. W tym poradniku
znajdziesz przykład oparty na jednym z nich. Istnieje jednak więcej podobieństw niż różnic
między sterownikiem opisanym w poradniku, a innymi produkowanymi na świecie. Jestem
pewien, że w razie potrzeby po zapoznaniu się z dokumentacją techniczną dowolnego
sterownika znajdziesz w niej podobieństwo do sterownika tutaj opisanego.
W poradniku znajdziesz:
−
wymagania wstępne – wykaz umiejętności, jakie powinieneś mieć opanowane, aby bez
problemów korzystać z materiału tej jednostki,
−
wykaz umiejętności, jakie ukształtujesz podczas pracy z poradnikiem,
−
materiał nauczania – „pigułka” wiadomości teoretycznych niezbędnych do opanowania
treści jednostki modułowej,
−
zestaw pytań, które pozwolą Ci sprawdzić, czy opanowałeś już podane treści,
−
ćwiczenia pomogą Ci zweryfikować wiadomości teoretyczne oraz ukształtować
umiejętności praktyczne,
−
sprawdzian postępów,
−
test osiągnięć – przykładowy zestaw zadań i pytań. Zaliczenie testu potwierdzi
opanowanie materiału całej jednostki modułowej,
−
literaturę uzupełniającą.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
Schemat układu jednostek modułowych
731[01].Z1
Podstawy regulacji
i wykorzystanie techniki
komputerowej w automatyce
731[01].Z1.01
Analizowanie struktury układu
regulacji i charakterystyk
regulatorów
731[01].Z1.02
Stosowanie sterowników
i komputerów w automatyce

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu nauczania jednostki modułowej powinieneś umieć:
−
posługiwać się dokumentacją konstrukcyjną i technologiczną, katalogami oraz normami
technicznymi,
−
odczytywać rysunki techniczne oraz schematy układów automatyki analogowej
i cyfrowej,
−
mierzyć podstawowe wielkości fizyczne i geometryczne,
−
stosować różne sposoby łączenia elementów,
−
rozpoznawać elementy mechanizmów precyzyjnych w przyrządach i układach
automatyki przemysłowej,
−
rozpoznawać elementy napędów hydraulicznych, pneumatycznych i elektrycznych
stosowanych w układach automatyki przemysłowej,
−
montować elementy i zespoły układów automatyki przemysłowej, aparatury kontrolno–
pomiarowej i urządzeń precyzyjnych,
−
przestrzegać przepisów bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej
oraz ochrony środowiska,
−
organizować stanowisko pracy zgodnie z wymaganiami ergonomii,
−
udzielać pierwszej pomocy poszkodowanym w wypadkach przy pracy,
−
komunikować się z uczestnikami procesu pracy,
−
korzystać z różnych źródeł informacji,
−
badać układy elektryczne i elektroniczne,
−
posługiwać się komputerem w stopniu podstawowym.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
−
rozpoznać oznaczenia i symbole stosowane na sterownikach,
−
rozróżnić wejścia i wyjścia analogowe i cyfrowe sterowników,
−
zidentyfikować elementy układów elektrycznych współpracujących ze sterownikiem,
−
wyjaśnić budowę, zasadę działania i określić funkcje układów elektrycznych
współpracujących ze sterownikiem,
−
podłączyć sterownik do sieci zasilającej,
−
połączyć sterownik z układami pomiarowymi i wykonawczymi zgodnie z dokumentacją
techniczną,
−
zlokalizować uszkodzenia w obwodach,
−
określić rodzaje błędów i usterek w obwodach (skorzystać z kodów błędów
sterowników),
−
skorzystać z programów komputerowych w celu uruchamiania sterowników,
−
sprawdzić zabezpieczenia instalacji i urządzeń elektrycznych oraz układów
elektronicznych,
−
posłużyć się dokumentacją techniczną, katalogami oraz normami, podczas doboru
elementów układów elektrycznych i elektronicznych,
−
skorzystać z programu komputerowego podczas dobierania elementów układów
elektrycznych i elektronicznych,
−
zastosować zasady bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej
oraz ochrony środowiska na stanowisku pracy.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
4. MATERIAŁ NAUCZANIA
4.1. Oznaczenia
i
symbole
stosowane
na
sterownikach
i w dokumentacji technicznej oraz budowa i parametry
elektryczne sterowników
4.1.1. Materiał nauczania
Sterowniki możemy podzielić na różne sposoby. Ze względu na wielkość możemy
wyróżnić trzy grupy sterowników:
1. Sterowniki małe – max 100 I/O (I – wejścia dwustanowe, O – wyjścia dwustanowe),
przeznaczone są do obsługi pojedynczej maszyny lub małego węzła technologicznego.
2. Sterowniki średnie – od 100 do 500 I/O. Przeznaczone są do obsługi pojedynczego węzła
technologicznego lub prostej linii produkcyjnej.
3. Sterowniki duże – od 500 do 3000 I/O. Przeznaczone są do obsługi całej linii
produkcyjnej lub kilku węzłów technologicznych.
Ze względu na budowę rozróżniamy dwie grupy sterowników:
1. Sterowniki kompaktowe – charakteryzujące się zwartą budową zawierającą wszystkie
elementy z brakiem możliwości ich przekonfigurowania.
2. Sterowniki modułowe – występuje w nich jedna płyta rozszerzeń z miejscem na moduły,
które można dobierać według potrzeb projektanta.
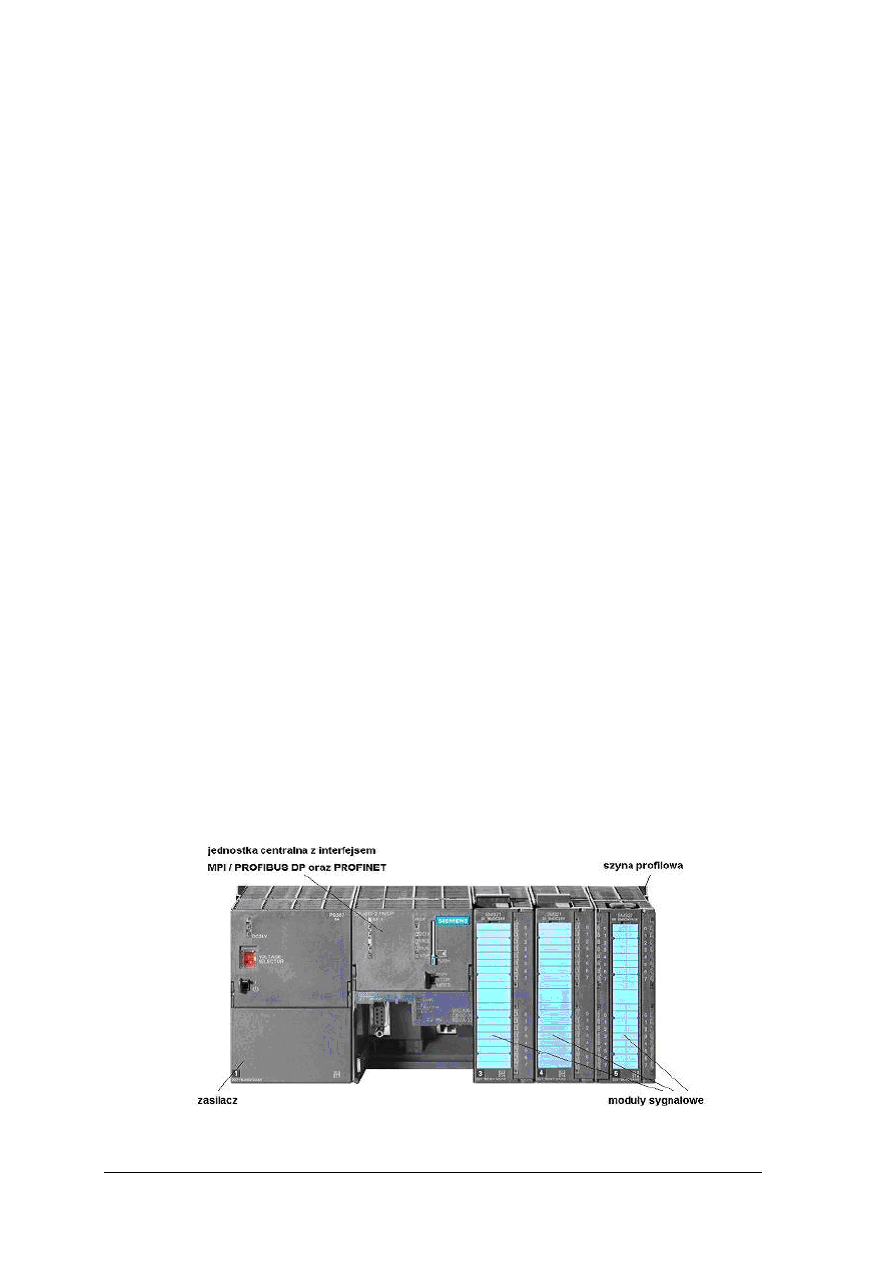
Budowa zewnętrzna
Sterowniki programowalne różnych producentów różnią się między sobą dość znacznie,
jednak z reguły posiadają pewne cechy wspólne. W budowie zewnętrznej sterownika PLC
zauważyć można takie elementy jak:
−
dwustanowe moduły wejść i wyjść,
−
analogowe moduły wejść i wyjść,
−
jednostkę centralną CPU,
−
zasilacz,
−
kasetę rozszerzeń z miejscem na moduły,
−
obwody licznika impulsów,
−
moduł pozycjonowania osi,
−
moduły komunikacyjne obsługujące standardowe protokoły przesyłania danych.
Elementy wewnętrzne sterownika zabudowane są w zwartej obudowie najczęściej
z tworzywa sztucznego zapewniającego ochronę przeciwporażeniową oraz ochronę przed
przypadkowym wprowadzeniem części mogących spowodować uszkodzenie mechaniczne lub
elektryczne sterownika. Wyprowadzenia realizowane są wtykowo, dzięki czemu możliwe jest
wykonywanie szybkich połączeń bez potrzeby uprzedniego mocowania sterownika na tablicy.
(rys. 1). Oznaczenia na sterownikach:
Wejście sterownika
Wyjście sterownika
INPUT
OUTPUT
IN
OUT
E
A
EINGANG
AUSGANG
EIN
AUS
WEJŚCIE
WYJŚCIE
WEJ
WYJ
I
Q
X
Y
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
Rys. 1.
Budowa zewnętrzna sterownika [opracowanie własne]
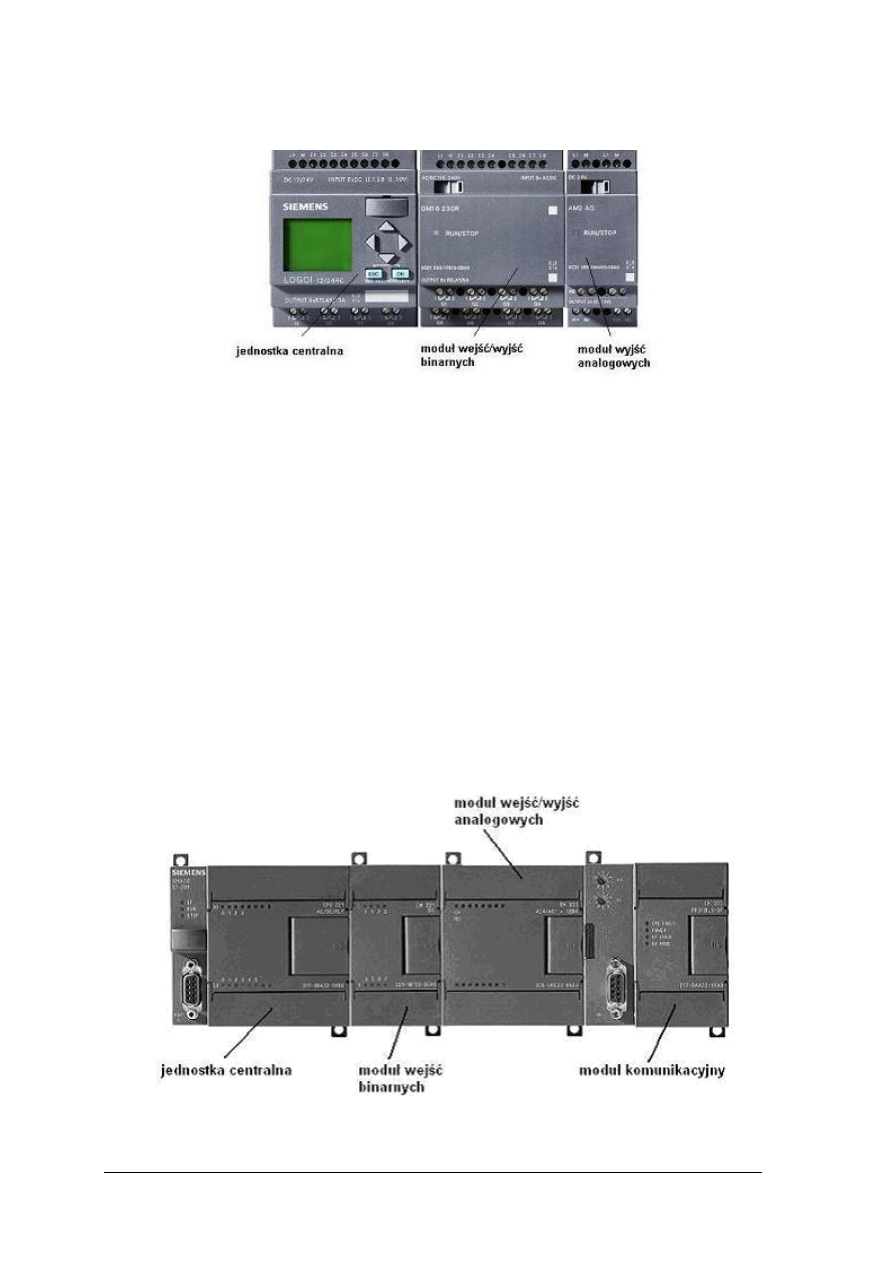
Sterownik LOGO! (sterownik mały, rys. 2) to uniwersalne urządzenie służące
do przełączania i sterowania w zastosowaniach domowych i przemysłowych. Umożliwia
sterowanie oświetleniem, roletami, żaluzjami, systemami grzewczymi i klimatyzacyjnymi
oraz szeregiem innych urządzeń. LOGO! znajduje również zastosowanie w przemyśle do
budowy układów sterowania i automatyzacji maszyn. Posiada dopuszczenie do zastosowań
na statkach
morskich. Dzięki wykorzystaniu
inteligentnych sterowników LOGO!
optymalizowany jest czas projektowania oraz uruchamiania instalacji. Minimalizowane są
układy związane z wykonaniem połączeń elektrycznych w odniesieniu do konwencjonalnych
sterowań budowanych na bazie przekaźników i styczników. Ważną zaletą sterowników
LOGO! jest łatwość programowania. Program tworzymy łącząc ze sobą gotowe bloki
funkcyjne. Podstawowe dane techniczne LOGO!:
−
maksymalna liczba we/wy cyfrowych: 24/16,
−
maksymalna liczba we/wy analogowych: 8/2,
−
modułowa konstrukcja,
−
duży wybór modułów wejścia/wyjścia,
−
automatyczny przełącznik lato/zima,
−
wyświetlacz LCD z możliwością wyświetlania znaków alfanumerycznych,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
−
możliwość łatwej rozbudowy,
−
eliminacja zakłóceń w klasie B.
Rys. 2. Budowa sterownika LOGO! (przykład małego sterownika modułowego) [7]
Moduł podstawowy LOGO! Basic dostępny jest w dwóch klasach napięciowych
(zasilany napięciem 24VDC, 12VDC (napięcie stałe), 24VDC lub 24VAC (napięcie
przemienne), a także w zakresie napięć 115 – 240VAC/DC) oraz w dwóch wykonaniach
(z wyświetlaczem oraz bez wyświetlacza). Moduł podstawowy LOGO! wyposażony jest
w interfejs umożliwiający dołączenie dodatkowych modułów rozszerzeń. LOGO! może
zostać zamontowany na 35 mm szynie DIN lub bezpośrednio na ścianie lub drzwiach szafy
sterującej. Za pomocą modułów rozszerzeń można podłączyć 24 wejścia binarne, 16 wyjść
binarnych, 8 wejść analogowych oraz 2 wyjścia analogowe. Dzięki modułowi 2 wyjść
analogowych można wykorzystać w programie funkcje regulatora PI itp.
Sterownik S7–200 (sterownik średni, rys. 3) jest sterownikiem dedykowanym
automatyzacji maszyn i urządzeń oraz przeznaczonym do tworzenia zdecentralizowanych
struktur sterowania dla małych obiektów typu przepompownie, małe oczyszczalnie ścieków.
Niewielkie wymiary i kompaktowa budowa modułowa predysponują S7–200 do zastosowań
w miejscach o ograniczonej przestrzeni zabudowy. Może być łatwo dopasowany do wymagań
użytkownika. Sterownik charakteryzuje się doskonałą wydajnością oraz funkcjonalnością.
Obsługuje procesy w czasie rzeczywistym, tzn. że sterownik wyposażony jest w zegar czasu
rzeczywistego (ustawiona jest w nim data i czas), który pozwala na sterowanie
uwzględniające pory roku oraz pory dnia.
Rys. 3. Budowa sterownika S7–200 (przykład średniego sterownika modułowego) [7]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
Podstawowe dane techniczne S7 – 200:
−
maksymalna liczba we/wy cyfrowych: 128/120,
−
maksymalna liczba we/wy analogowych: 28/7,
−
modułowa konstrukcja,
−
duży wybór modułów wejścia/wyjścia,
−
możliwość budowy zdecentralizowanych struktur,
−
brak ruchomych części mechanicznych (wentylatora),
−
duża wydajność,
−
wersja „SIPLUS” o rozszerzonym zakresie temperatur od –25ºC do +70ºC
W rodzinie sterowników S7 – 200 występuje podział na sterowniki zasilane napięciem
230V AC oraz sterowniki zasilane z dodatkowego zasilacza napięciem 24V DC. Sterowniki
S7 – 200 zasilane napięciem 24V DC mają zintegrowane wyjścia typu „open colector”
24V DC/0,75A, zaś sterowniki zasilane napięciem 230V AC mają zintegrowane wyjścia
przekaźnikowe. Każda jednostka centralna wyposażona jest w wewnętrzny zasilacz 24V DC,
który może być zastosowany do zasilania modułów rozszerzeń. Sterownik montowany jest
wraz z modułami rozszerzeń na standardowej szynie DIN 35 mm. Bezpośrednio do CPU
(jednostki centralnej) można dołączyć max. 7 modułów rozszerzeń (CPU 224, CPU 226),
max. 2 moduły rozszerzeń (CPU 222). CPU 221 nie posiada możliwości rozszerzeń. Każdy
sterownik ma ponadto diody LED informujące o aktualnym trybie pracy oraz jedno lub dwa
złącza komunikacyjne służące do programowania sterownika oraz komunikacji z innymi
sterownikami lub urządzeniami zewnętrznymi typu panele operatorskie, czytniki kodów
paskowych, modemy GSM/GPRS, modemy analogowe, komputery PC itd. Sterownik
wyposażony jest też w gniazdo pamięci zewnętrznej EEPROM, służącej do przenoszenia
programu lub archiwizacji programów oraz danych. Podtrzymanie danych pamięci RAM jest
zrealizowane za pomocą kondensatora o dużej pojemności. Dane umieszczone w obszarach
remanentnych (podtrzymywanych po zaniku napięcia zasilania), po wyłączeniu zasilania
podtrzymywane są przez 70 godzin. Przy zastosowaniu baterii zewnętrznej można czas
podtrzymania wydłużyć do 200 dni.
Sterownik S7 – 300 (sterownik duży, rys. 4) jest najbardziej popularnym i najczęściej
stosowanym w przemyśle sterownikiem PLC. Przeznaczony jest do automatyzacji maszyn,
linii produkcyjnych i obiektów technologicznych. S7 – 300 stanowi nowoczesną
i uniwersalną platformę systemu automatyki. Umożliwia budowę zarówno autonomicznych
jak i opartych o sieci komunikacyjne, rozproszonych układów sterowania. Sterowniki S7–300
charakteryzują się prostą konfiguracją i programowaniem, co wpływa na obniżenie kosztów
projektowania i eksploatacji systemu automatyki.
Rys. 4. Budowa sterownika S7–300 [7]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
Kompletny sterownik S7 – 300 składa się z modułu zasilacza, procesora CPU
oraz modułów wejść/wyjść lub modułów komunikacyjnych i funkcjonalnych. Moduły mogą
być dołączane do CPU w dowolnej kolejności. Sterownik S7 – 300 nie wymaga „kasety”.
Poszczególne komponenty sterownika montowane są na specjalistycznej szynie montażowej.
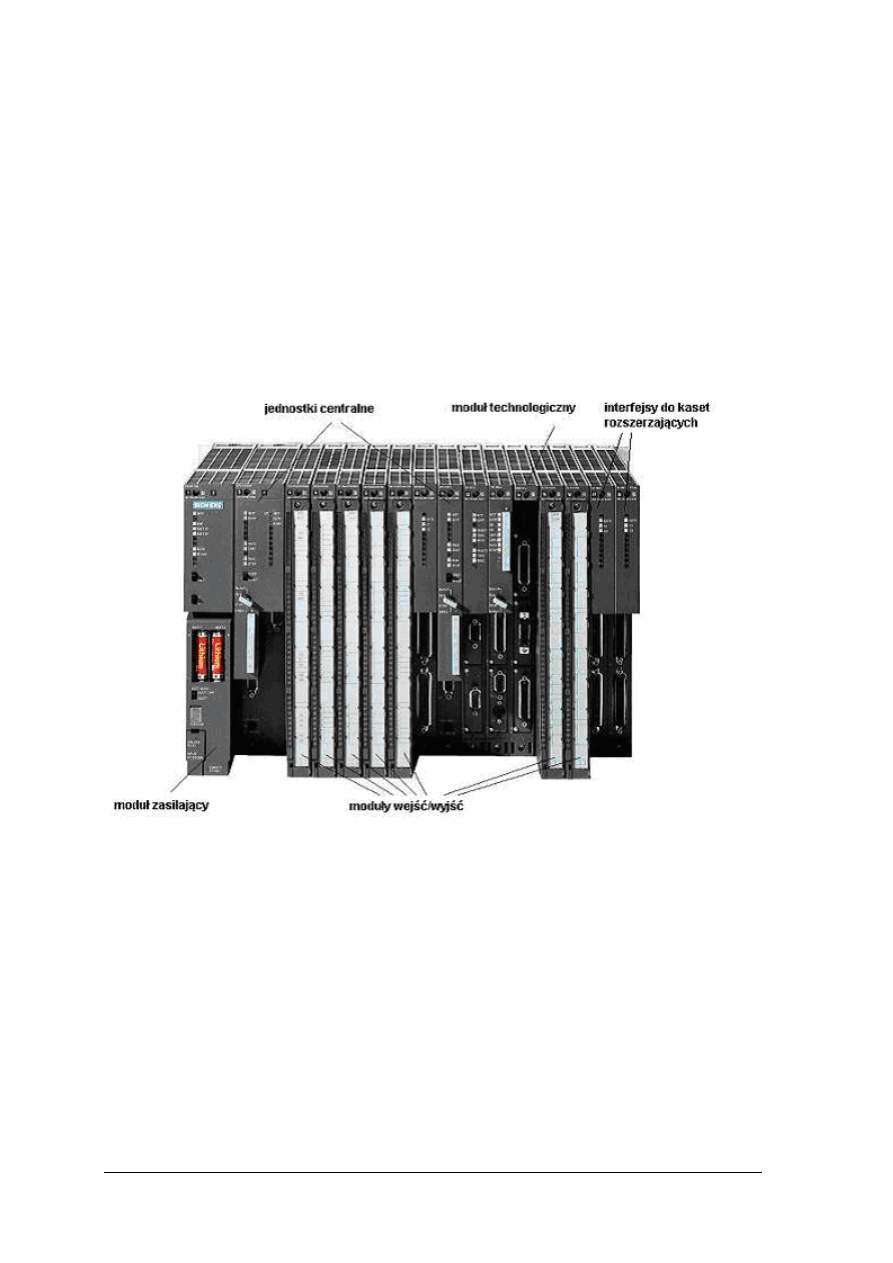
Sterownik S7 – 400 (sterownik bardzo duży, rys. 5) to najbardziej wydajny i niezawodny
sterownik PLC firmy SIEMENS. Przeznaczony jest do sterowania procesami
technologicznymi oraz maszynami produkcyjnymi we wszystkich gałęziach przemysłu. Moc
obliczeniowa, wielkość pamięci oraz zasoby komunikacyjne umożliwiają budowanie na bazie
S7 – 400 kompletnych układów sterowania dla całej linii produkcyjnej. S7 – 400 stosowany
jest powszechnie w automatyce procesowej, w której sterownik PLC pełni funkcję
centralnego systemu sterowania i współpracuje za pośrednictwem sieci przemysłowych
z rozproszonymi układami wejścia/wyjścia. Doskonale sprawdza się również jako system
sterowania w szybkich maszynach produkcyjnych, dla których krótki cykl programu
sterownika gwarantuje uzyskanie maksymalnych wydajności produkcji.
Rys. 5. Budowa Sterownika S7–400 (przykład dużego sterownika modułowego) [7]
Podstawowe dane techniczne S7 – 400:
−
maksymalna liczba we/wy cyfrowych: 131056/131056,
−
maksymalna liczba we/wy analogowych: 8192/8192,
−
maks. pamięć programu 4 MB
−
komunikacja: MPI, PROFIBUS, Ethernet, PROFINET,
−
bardzo krótki czas wykonywania instrukcji,
−
konstrukcja bez wentylatora,
−
duży wybór procesorów, modułów wej/wyj, opcji komunikacyjnych, modułów
funkcyjnych,
−
możliwość pracy wieloprocesorowej,
−
interfejsy do systemów IT i sieci WWW.
Sterownik S7 – 400 ma konstrukcję modułową i nie posiada ruchomych, zużywających
się części mechanicznych. Jego konfiguracja sprzętowa może być optymalnie dopasowana
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
do wymagań danej aplikacji. Poszczególne elementy systemy S7 – 400 montowane są
w kasecie „rack” z wbudowaną magistralą „backplane”. Moduły sygnałowe mogą być
umieszczane centralnie, bezpośrednio za procesorem głównym CPU lub w kasetach
oddalonych. Moduły sygnałowe centralne oraz zdalne można wymieniać pod napięciem
i w trakcie pracy systemu. Szybka i wydajna magistrala „backplane” sterownika S7 – 400
pozwala na obsługę przez główne CPU kilku procesorów komunikacyjnych. Każdy
z procesorów komunikacyjnych może kontrolować niezależną sieć przemysłową,
np. PROFIBUS lub PROFINET.
Wykorzystanie sieci przemysłowych umożliwia podzielenie całego systemu sterowania
na odrębne podsystemy np. do wymiany danych ze zdalnymi wej/wyj, napędami
elektrycznymi, panelami operatorskimi lub systemami MES. Do łączenia ze sobą kaset
centralnej oraz rozszerzających (maksymalnie do 21 kaset rozszerzających) wykorzystywane
są moduły interfejsowe.
Oznaczenia i symbole spotykane w dokumentacji
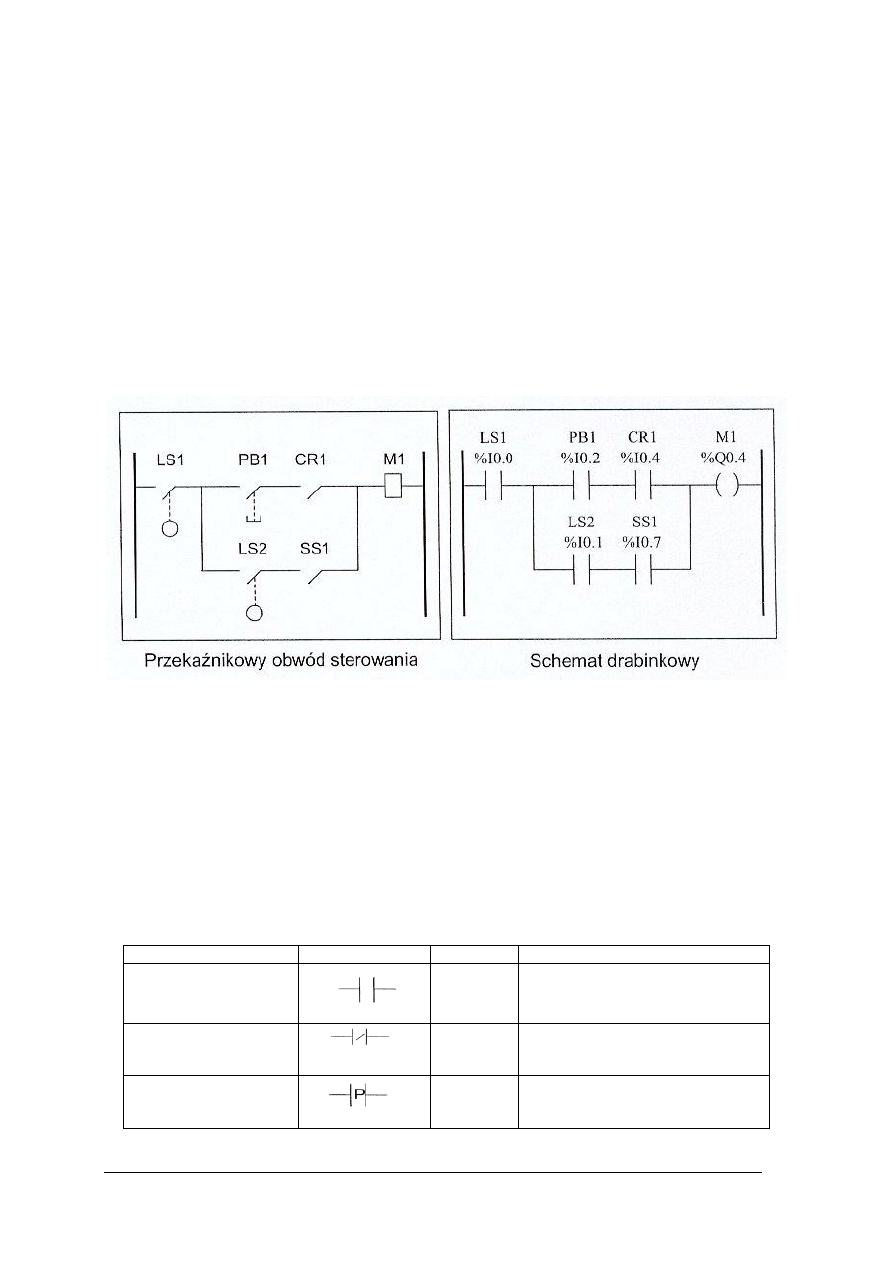
Rys. 6.
Równoważne schematy obwód przekaźnikowy – Ladder [5, s.212]
Rysunek 6 pokazuje uproszczony schemat połączeń przekaźnikowego obwodu
sterowania i równoważny schemat drabinkowy (Ladder). Wszystkie wejścia związane
z aparatami łączeniowymi obwodu przekaźnikowego (LS1, LS2, PB1, CR1, SS1)
są pokazane jako zestyki w schemacie drabinkowym. Cewka M1 obwodu przekaźnikowego
jest reprezentowana przez symbol cewki wyjściowej w schemacie drabinkowym. Numery
adresów umieszczone nad każdym symbolem zestyku/cewki w schemacie drabinkowym
są odniesieniem do rozmieszczenia zewnętrznych połączeń wejść/wyjść sterownika.
Symbole graficzne elementów w języku drabinkowym
Instrukcje w języku drabinkowym zawierają elementy graficzne (rys. 7, rys. 8, rys. 9)
Nazwa
Element graficzny Instrukcja
Funkcja
Zestyk normalnie otwarty
LD
Przejście
przez
zestyk,
gdy
kontrolowany
obiekt
bitowy
jest
w stanie 1.
Zestyk
normalnie
zamknięty
LDN
Przejście
przez
zestyk,
gdy
kontrolowany
obiekt
bitowy
jest
w stanie 0.
Zestyk do wykrycia zbocza
narastającego
LDR
Zbocze narastające: wykrycie zmiany
stanu
kontrolowanego
obiektu
bitowego z 0 na 1.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
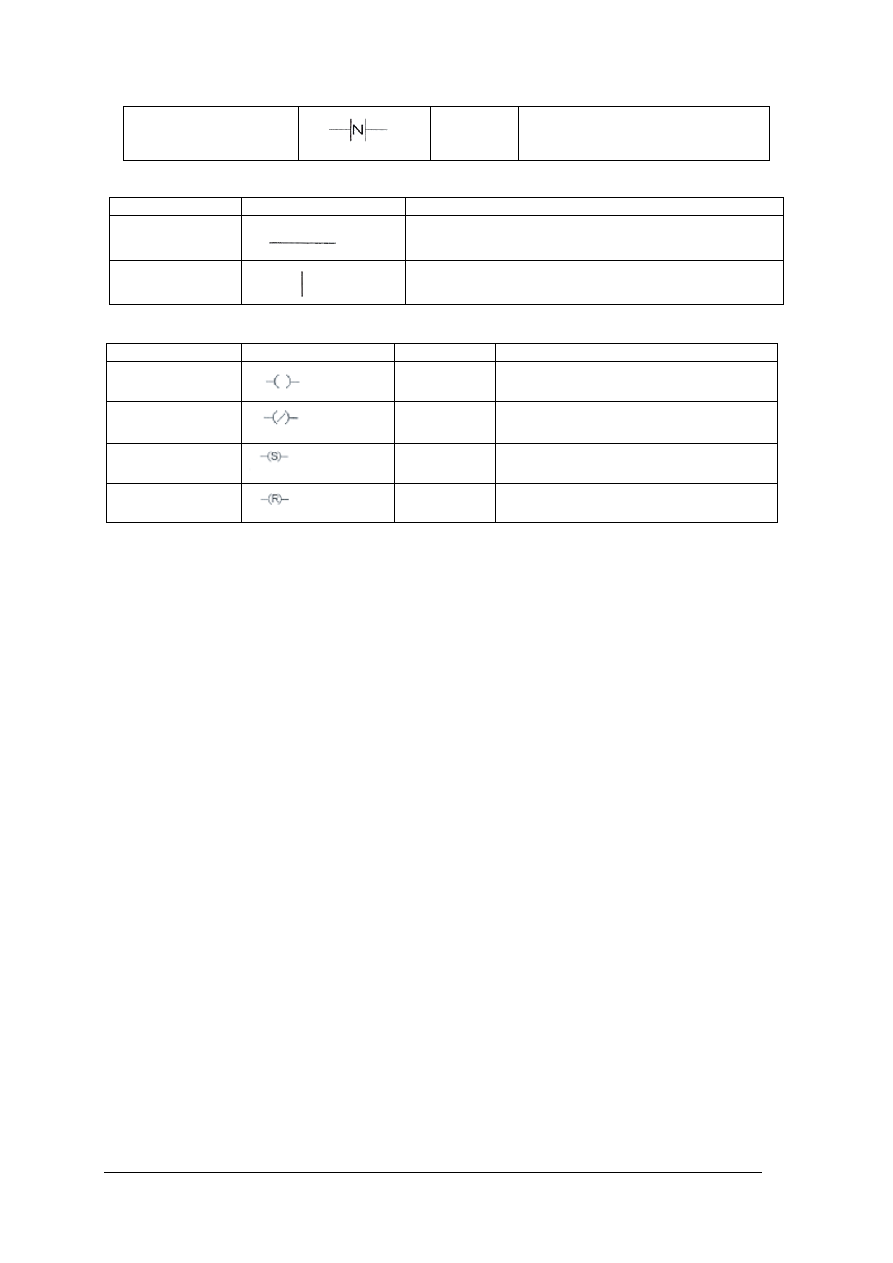
Zestyk do wykrycia zbocza
opadającego
LDF
Zbocze narastające: wykrycie zmiany
stanu
kontrolowanego
obiektu
bitowego z 1 na 0.
Rys. 7.
Symbole zestyków w schemacie drabinkowym [5, s.219]
Nazwa
Element graficzny
Funkcja
Łącznik poziomy
Połączenie szeregowe elementów graficznych testu i akcji
pomiędzy dwoma szynami potencjału.
Łącznik pionowy
Połączenie równoległe elementów graficznych testu i akcji.
Rys. 8.
Symbole elementów łączących w schemacie drabinkowym [5, s.219]
Nazwa
Element graficzny
Instrukcja
Funkcja
Cewka
bezpośrednia
ST
Skojarzony obiekt bitowy otrzymuje wartość
wyniku strefy testu.
Cewka zanegowana
STN
Skojarzony
obiekt
bitowy
otrzymuje
zanegowaną wartość wyniku strefy testu.
Cewka ustawiania
S
Skojarzony obiekt bitowy jest ustawiony na
1, gdy wynik strefy testów jest 1.
Cewka kasowania
R
Skojarzony obiekt bitowy jest ustawiony na
1, gdy wynik strefy testów jest 0.
Rys. 9.
Symbole cewek stosowane w schemacie drabinkowym [5, s.220]
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. W jaki sposób dzielimy sterowniki?
2. Jakie znasz części składowe sterownika?
3. Jakie zaciski są dostępne na zewnątrz obudowy sterownika?
4. Jak oznaczane są wejścia, a jak wyjścia na sterowniku?
5. Jak oznaczane są wejścia i wyjścia sterownika w dokumentacji?
6. Jak oznaczone są zaciski zasilające na sterowniku i w dokumentacji?
7. Jakiego typu zestyki występują w schemacie drabinkowym i jakie mają symbole?
8. Jakiego typu cewki występują w schemacie drabinkowym i jakie mają symbole?
4.1.3. Ćwiczenia
Ćwiczenie 1
Dokonaj identyfikacji wyprowadzeń sterownika.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) odszukać wyprowadzenia sterownika,
2) zidentyfikować wyprowadzenia,
3) wskazać i nazwać poszczególne wyprowadzenia,
4) wyjaśnić funkcje poszczególnych wyprowadzeń lub grup wyprowadzeń,
5) wykonać szkic sterownika z naniesionymi wyprowadzeniami,
6) nanieść oznaczenia wyprowadzeń sterownika na szkicu.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
Wyposażenie stanowiska pracy:
−
sterownik PLC,
−
dokumentacja techniczna sterownika,
−
arkusze papieru formatu A4, flamastry,
−
arkusz do ćwiczenia.
Ćwiczenie 2
Rozpoznaj symbole i oznaczenia w dokumentacji układów sterowniczych.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) odszukać symbole i oznaczenie w otrzymanej dokumentacji układu sterowniczego,
2) zidentyfikować poszczególne symbole i oznaczenia w dokumentacji,
3) rozpoznać i nazwać elementy układu sterowniczego przedstawione kolejnymi
symbolami,
4) rozpoznać na schemacie wyprowadzenia sterownika,
5) umieścić rozpoznane elementy układu sterowniczego na stanowisku montażowym,
6) połączyć układ sterowniczy zgodnie ze schematem,
7) przerysować schemat ideowy i narysować schemat montażowy,
8) nanieść oznaczenia na narysowane schematy.
Wyposażenie stanowiska pracy:
−
schemat układu sterowniczego,
−
sterownik PLC,
−
dokumentacja techniczna sterownika,
−
zestaw elementów umieszczonych na schemacie układu sterowniczego,
−
przewody łączeniowe,
−
zestaw narzędzi monterskich,
−
arkusze papieru formatu A4, flamastry,
−
arkusz do ćwiczenia.
4.1.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
wyjaśnić pojęcie wejście binarne (cyfrowe)?
2)
wyjaśnić pojęcie wejście analogowe?
3)
wyjaśnić pojęcie wyjście cyfrowe?
4)
wyjaśnić pojęcie wyjście analogowe?
5)
wyjaśnić pojęcie zaciski zasilające?
6)
wyjaśnić pojęcie złącze komunikacyjne?
7)
wskazać na sterowniku wejście binarne (cyfrowe)?
8)
wskazać na sterowniku wejście analogowe?
9)
wskazać na sterowniku wyjście cyfrowe?
10) wskazać na sterowniku wyjście analogowe?
11) wskazać na sterowniku wejście zasilające?
12) wskazać na sterowniku złącze komunikacyjne?
13) rozpoznać oznaczenia stosowane w dokumentacji?
14) powiązać oznaczenia w dokumentacji i na sterowniku?
15) odczytać symbole elementów w schematach drabinkowych?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
4.2. Zasada działania sterownika i jego parametry elektryczne
4.2.1. Materiał nauczania
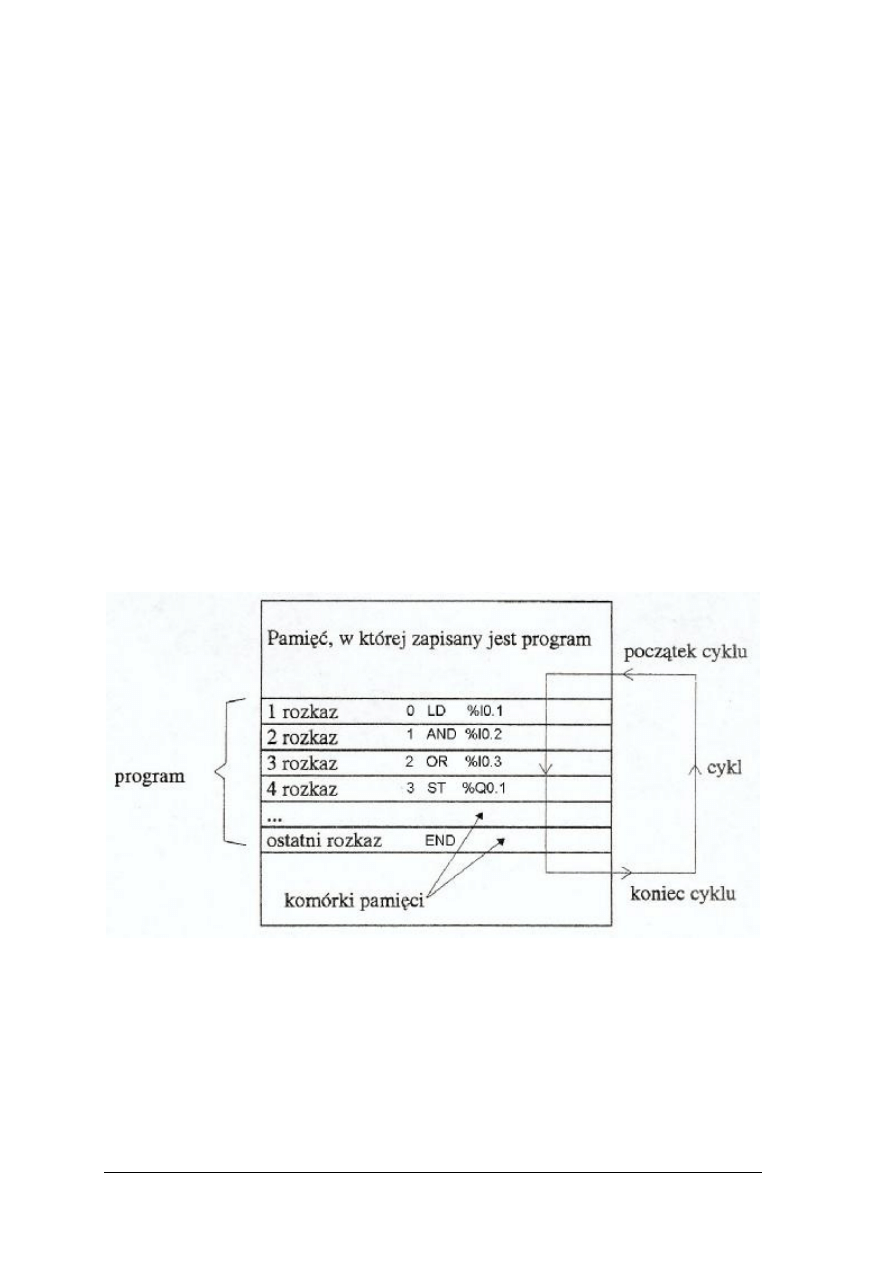
Obróbka programu przez sterownik
Sterownik odczytuje na początku programu stany sygnałów na wejściu i wyjściu
i zapamiętuje je w specjalnie zarezerwowanym obszarze pamięci. Stany te pozostają
niezmienne w czasie jednego cyklu programowego. Następnie rozpoczyna się proces analizy
programu polegający na opracowywaniu rozkazów, w kolejności ich występowania
w programie. Po realizacji całości programu, wyniki operacji logicznych wyprowadzane
zostają na odpowiednie wyjścia sterownika. Następnie rozpoczyna się proces obróbki
programu od początku tzn. od zapisania w pamięci stanu sygnałów na wejściu i wyjściu PLC.
Sterownik realizuje sygnały w sposób szeregowy tzn. kolejno krok po kroku i w sposób
cykliczny tzn. po realizacji wszystkich rozkazów w programie rozpoczyna się proces obróbki
programu od początku. Czas trwania jednego cyklu programowego zależny jest od długości
programu, rodzaju operacji (binarne słowne – słowo to 16 bitów) i ilości urządzeń
rozszerzających.
Wyjścia cyfrowe sterownika są podstawowymi składnikami bloków wyjść sterowników
PLC. Produkowane są (przeważnie) dwa rodzaje wyjść: tranzystorowe o obciążalności 0,5A
oraz przekaźnikowe o obciążalności 8 A. Przez wyjścia cyfrowe sterownik steruje
urządzeniami zewnętrznymi takimi jak: przekaźniki, styczniki, elektrozawory, lampki
kontrolne, sygnały akustyczne, silniki krokowe itd. Istnieją również specjalizowane wyjścia
cyfrowe w zależności od potrzeb producentów.
Rys. 10. Obróbka programu przez sterownik – cykl programowy [opracowanie własne]
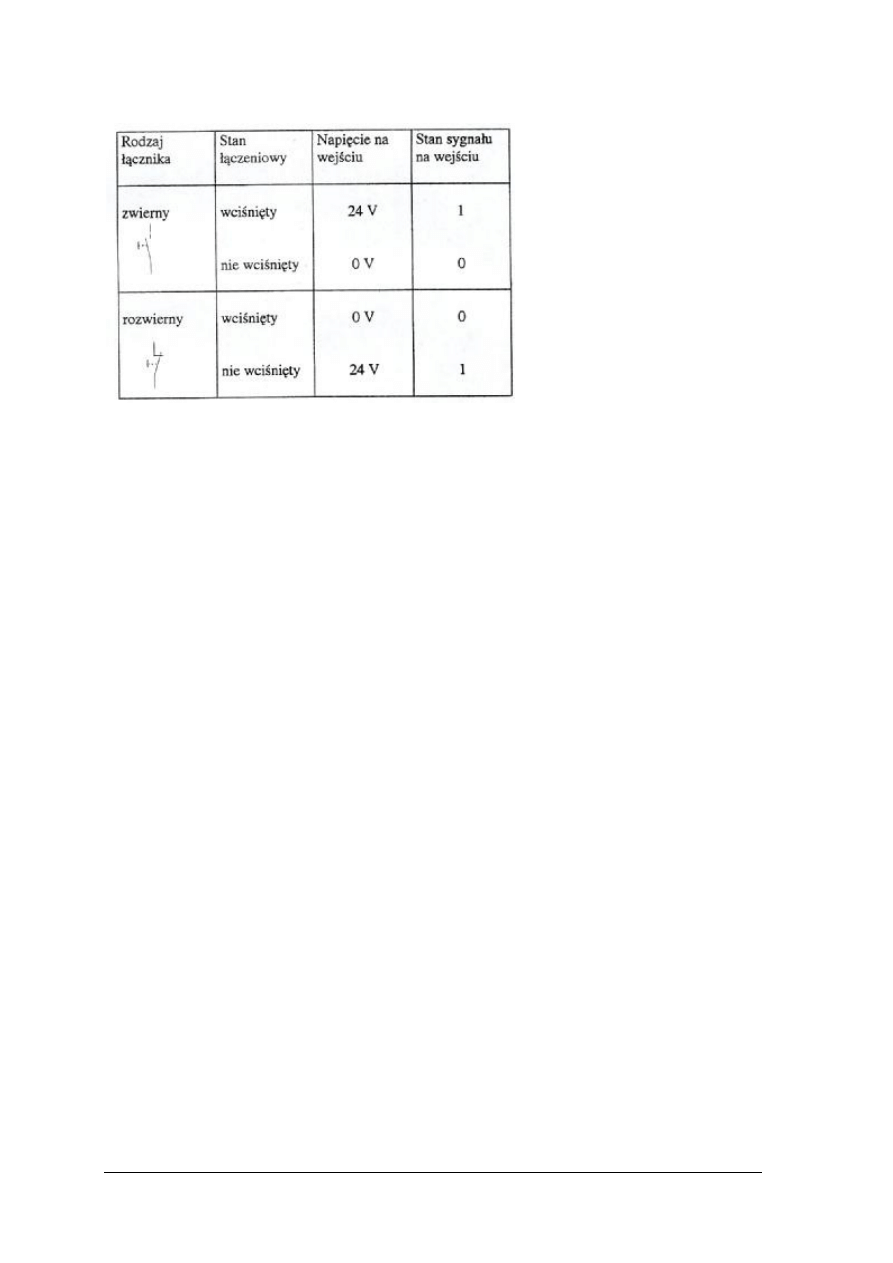
Analiza stanu sygnału na wejściu – łączniki zwierne i rozwierne [tabela 1]. Zadaniem
sterownika jest analiza stanu sygnałów na wejściu, obróbka informacji według zadanego
programu i odpowiednie wysterowanie wyjść. Analiza stanu sygnałów na wejściu polega na
stwierdzeniu czy:
−
podane zostało napięcie 24 V – sygnał 1,
−
brak napięcia – sygnał 0.
Najprostszym sposobem podania sygnału na wejście sterownika jest użycie łączników
zwiernych i rozwiernych.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
Tabela 1. Tabela łączeń [opracowanie własne]
Łącznik zwierny
–
wciśnięcie łącznika zwiernego powoduje podanie napięcia
na wejściu sterownika, a więc pojawienie się sygnału 1
Łącznik rozwierny
–
wciśnięcie łącznika rozwiernego powoduje zanik napięcia
na wejściu sterownika, a więc pojawienie się sygnału 0
Sygnał 1
–
sygnał 1 pojawia się na wejściu sterownika kiedy:
a) łącznik zwierny jest zamknięty, tzn. wciśnięty
b) łącznik rozwierny jest zamknięty, tzn. niewciśnięty
Sygnał 0
–
sygnał 1 pojawia się na wejściu sterownika kiedy:
a) łącznik zwierny jest otwarty, tzn. niewciśnięty
b) łącznik rozwierny jest otwarty, tzn. wciśnięty
Pamięci sterownika
Napisany program zapisywany jest w jednej pamięci PLC:
−
RAM
−
opcjonalnie EEPROM.
RAM (Random Access Memory) jest pamięcią o swobodnym dostępie. Pamięć tą można
porównać do szafy z wieloma szufladami – komórkami pamięci. Każda z szuflad posiada
określoną wielkość – pojemność pamięci, określony numer – adres. Poszczególne dane
wkładane są do ponumerowanych szuflad lub ewentualnie stamtąd wyciągane. Podobnie
działa pamięć RAM. Informacja zapisywana jest pod odpowiednim adresem w komórce
pamięci i w razie potrzeby, po podaniu adresu, stamtąd odczytana. Pobranie informacji
z komórki pamięci nie powoduje jej wymazania. Niepotrzebną informację kasuje się przy
pomocy specjalnej procedury lub w sposób automatyczny, zapisując nową informację pod
adresem starej. Informacje zapisane w RAM zostają wykasowane w wyniku zaniku napięcia
zasilającego i wyczerpania baterii buforowej.
EEPROM (Elictrically Erasable Programmable Read Only Memory) jest kasowalną
i zapisywalną pamięcią stałą. Nowo napisany i przetestowany program można umieścić
w pamięci EEPROM i zabezpieczyć. Sterownik PLC dysponuje wtykową pamięcią
EEPROM, dzięki czemu możliwe jest przeniesienie programu z jednego sterownika
do drugiego, bez konieczności uruchamiania komputera. W ten sposób można wielokrotnie
wykorzystywać ten sam program, w różnych układach o jednakowym zadaniu sterowniczym.
Zawartość pamięci EEPROM jest zapisywana i kasowana za pomocą impulsów
elektrycznych. Komórki pamięci można wielokrotnie zapisywać tzn. zmieniać dowolnie
rozkazy w programie.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Co to jest cykl programowy?
2. Jak rozumiesz to, że sterownik wykonuje instrukcje szeregowo?
3. Od czego zależy czas trwania jednego cyklu programowego?
4. Czy sterownik zauważy zmianę stanu wejścia podczas cyklu programowego?
5. Jaki stan odczyta sterownik na wejściu, do którego podłączono wciśnięty łącznik
rozwierny?
6. Jaka wartość napięcia odpowiada jedynce logicznej na wejściu sterownika?
7. Do jakiej pamięci zapisywany jest program sterownika?
8. Jakie
są
podobieństwa
i
różnice
pomiędzy
pamięciami
współpracującymi
ze sterownikiem?
4.2.3. Ćwiczenia
Ćwiczenie 1
Przeanalizuj stan sygnałów na wejściu sterownika – łączniki zwierne i rozwierne. Ten
program pozwoli Ci przeprowadzić test podłączenia wejść i wyjść sterownika.
Przykładowy układ połączeń:
Rys. do ćwiczenia 1
Przykładowy program (do rys. do ćwiczenia 1):
LD
% I0.1 ;oznaczenie %I0.1 odpowiada oznaczeniu I1 na listwie sterownika,
ST
% Q0.0;oznaczenie %Q0.0 odpowiada oznaczeniu Q0 na listwie sterownika,
LD
% I0.2 ;oznaczenie %I0.2 odpowiada oznaczeniu I2 na listwie sterownika,
ST
% Q0.1;oznaczenie %Q0.1 odpowiada oznaczeniu Q1 na listwie sterownika.
END
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) rozpoznać elementy na schemacie oraz zidentyfikować adresy wejść i wyjść
w sterowniku,
2) wybrać odpowiednie łączniki i połączyć je ze sterownikiem zgodnie ze schematem,
3) połączyć sterownik z komputerem przy pomocy specjalnego przewodu komunikacyjnego
(interfejsu),
4) włączyć komputer i sterownik do zasilania,
5) uruchomić oprogramowanie sterownika,
6) przepisać program w edytorze, zapisać go na dysku i przesłać do pamięci sterownika,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
7) uruchomić sterownik,
8) przetestować pracę sterownika,
9) zamienić łączniki S1 i S2 miejscami,
10) powtórnie przetestować pracę sterownika,
11) spostrzeżenia zapisać w zeszycie i wyciągnąć wnioski,
12) wyłączyć sterownik i komputer,
13) odłączyć interfejs.
Wyposażenie stanowiska pracy:
−
komputer z oprogramowaniem do sterownika PLC,
−
stanowisko montażowe ze sterownikiem PLC,
−
DTR sterownika PLC,
−
interfejs do połączenia sterownika z komputerem,
−
łączniki zwierne i rozwierne,
−
lampki kontrolne,
−
przewody łączeniowe,
−
miernik uniwersalny wraz z przewodami pomiarowymi,
−
narzędzia monterskie.
Ćwiczenie 2
Uruchom prasę stosując funkcję iloczynu logicznego.
Prasa powinna się automatycznie załączać przy opuszczonej klatce ochronnej (łącznik
zwierny S1) i wciśniętych dwóch przyciskach sterowniczych S2 i S3.
Przykładowy układ połączeń:
Rys. do ćwiczenia 2
Przykładowy program (do rys. do ćwiczenia 2):
LD
% I0.0
AND
% I0.1
AND
% I0.2
ST
% Q0.0
END
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) rozpoznać elementy na schemacie oraz zidentyfikować adresy wejść i wyjść
w sterowniku,
2) wybrać odpowiednie łączniki i połączyć je ze sterownikiem zgodnie ze schematem,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
3) połączyć sterownik z komputerem przy pomocy specjalnego przewodu komunikacyjnego
(interfejsu),
4) włączyć komputer i sterownik do zasilania,
5) uruchomić oprogramowanie sterownika,
6) przepisać program w edytorze, zapisać go na dysku i przesłać do pamięci sterownika,
7) uruchomić sterownik,
8) przetestować pracę sterownika,
9) spostrzeżenia zapisać w zeszycie i wyciągnąć wnioski,
10) wyłączyć sterownik i komputer,
11) odłączyć interfejs.
Wyposażenie stanowiska pracy:
−
komputer z oprogramowaniem do sterownika PLC,
−
stanowisko montażowe ze sterownikiem PLC,
−
DTR sterownika PLC,
−
interfejs do połączenia sterownika z komputerem,
−
łączniki zwierne i rozwierne,
−
lampki kontrolne,
−
przewody łączeniowe,
−
miernik uniwersalny wraz z przewodami pomiarowymi,
−
narzędzia monterskie.
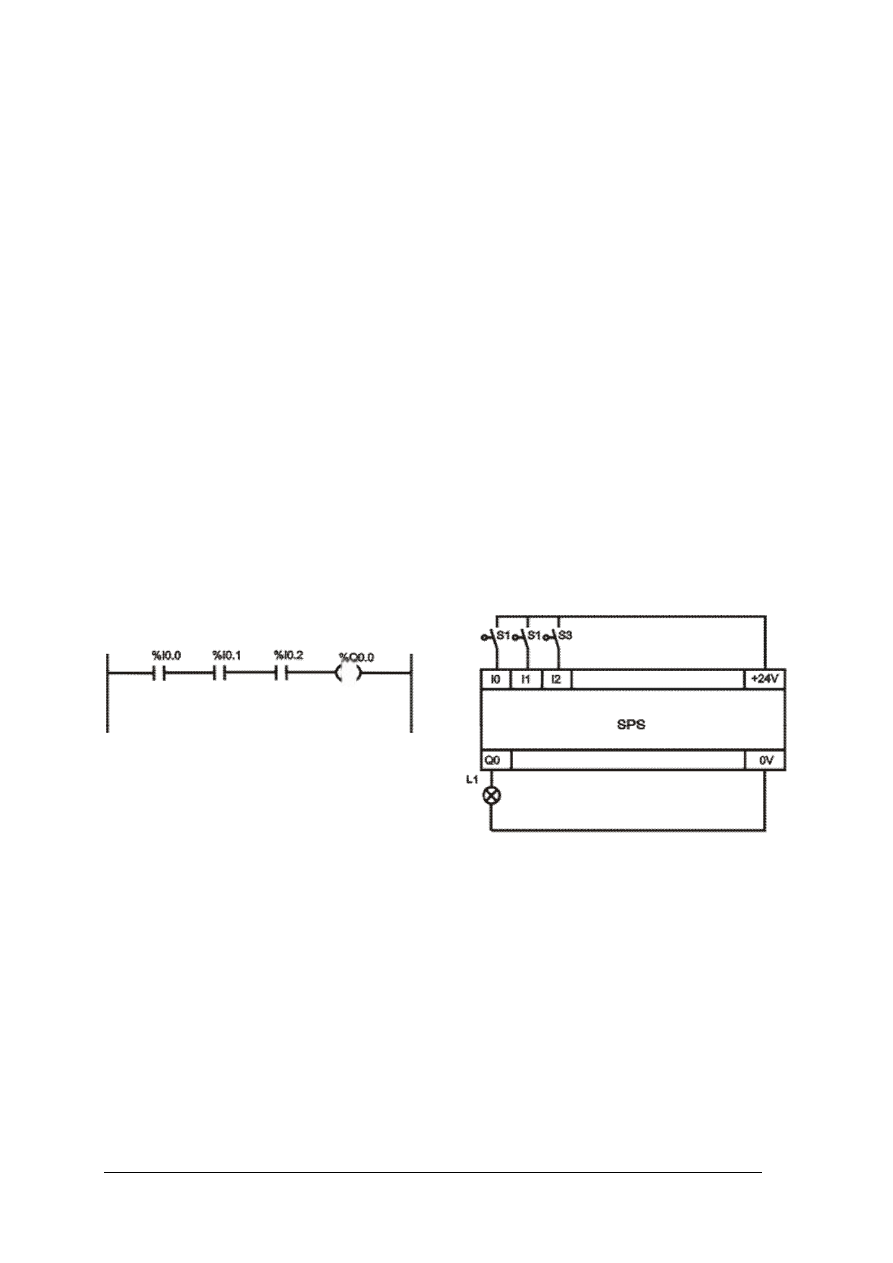
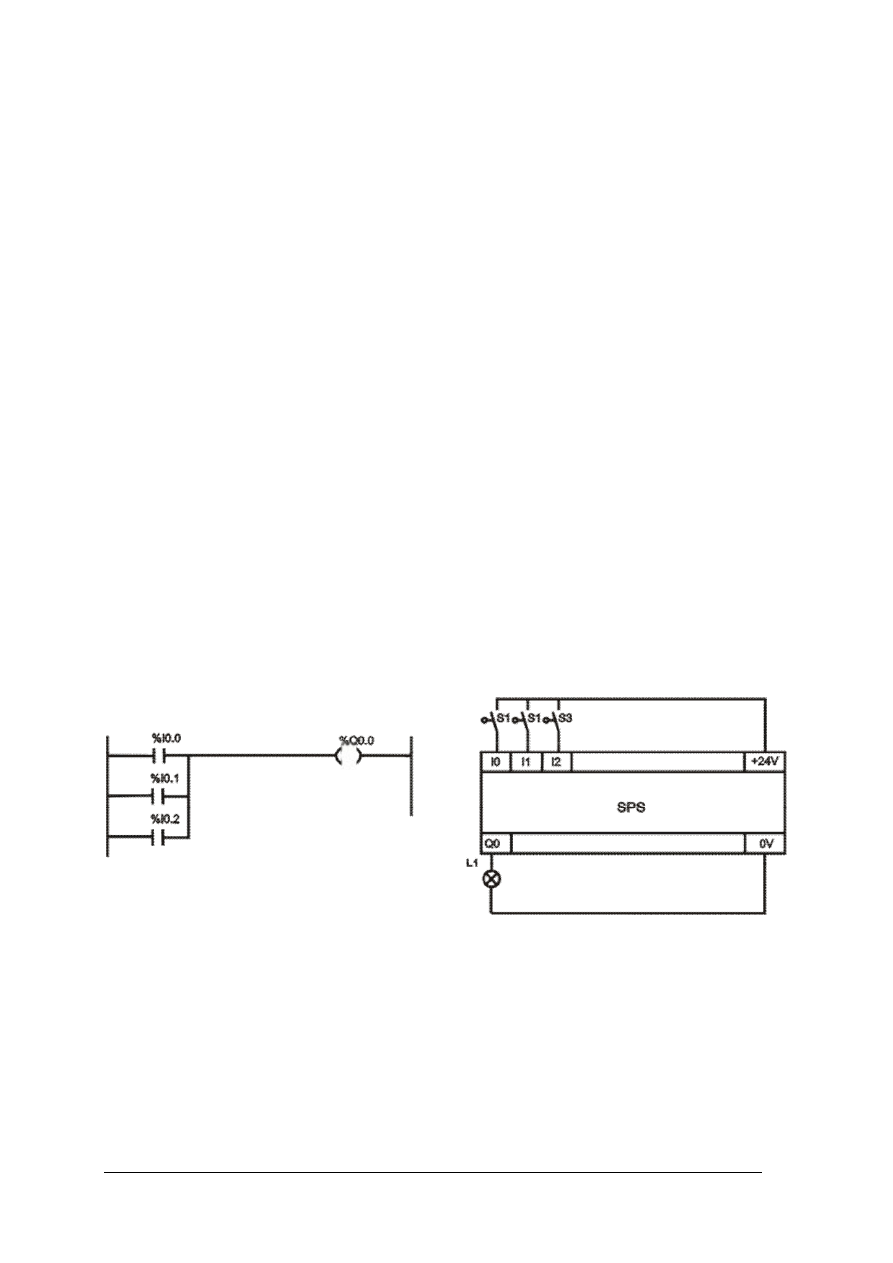
Ćwiczenie 3
Wykonaj wielomiejscowe zdalne sterowanie załączaniem silnika z zastosowaniem
funkcji sumy logicznej. Zrealizuj sterowanie umożliwiające załączanie silnika z trzech
różnych miejsc. Silnik powinien pracować tylko w czasie wciśnięcia dowolnego z trzech
przycisków sterowniczych. Wszystkie przełączniki są łącznikami zwiernymi.
Przykładowy układ połączeń:
Rys. do ćwiczenia 3
Przykładowy program (do rys. do ćwiczenia 3):
LD
% I0.0
OR
% I0.1 ;funkcja OR została opisana w rozdziale 4.5.1.
OR
% I0.2
ST
% Q0.0
END
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) rozpoznać elementy na schemacie oraz zidentyfikować adresy wejść i wyjść
w sterowniku,
2) połączyć sterownik z komputerem przy pomocy specjalnego przewodu komunikacyjnego
(interfejsu),
3) włączyć komputer i sterownik do zasilania,
4) uruchomić oprogramowanie sterownika,
5) przepisać program w edytorze, zapisać go na dysku i przesłać do pamięci sterownika,
6) uruchomić sterownik,
7) przetestować pracę sterownika,
8) spostrzeżenia zapisać w zeszycie i wyciągnąć wnioski,
9) wyłączyć sterownik i komputer,
10) odłączyć interfejs.
Wyposażenie stanowiska pracy:
−
komputer z oprogramowaniem do sterownika PLC,
−
stanowisko montażowe ze sterownikiem PLC,
−
DTR sterownika PLC,
−
interfejs do połączenia sterownika z komputerem,
−
łączniki zwierne i rozwierne,
−
lampki kontrolne,
−
przewody łączeniowe,
−
miernik uniwersalny wraz z przewodami pomiarowymi,
−
narzędzia monterskie.
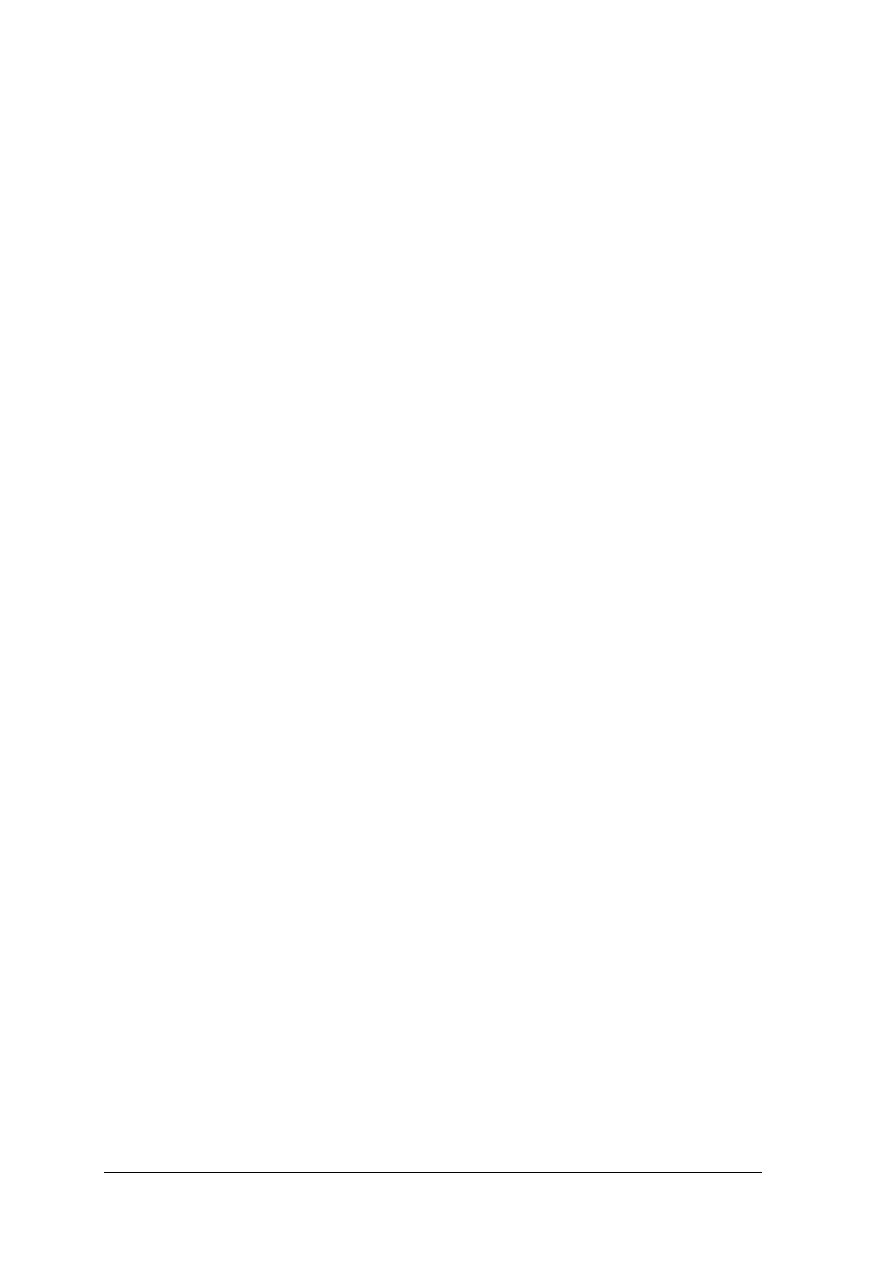
Ćwiczenie 4
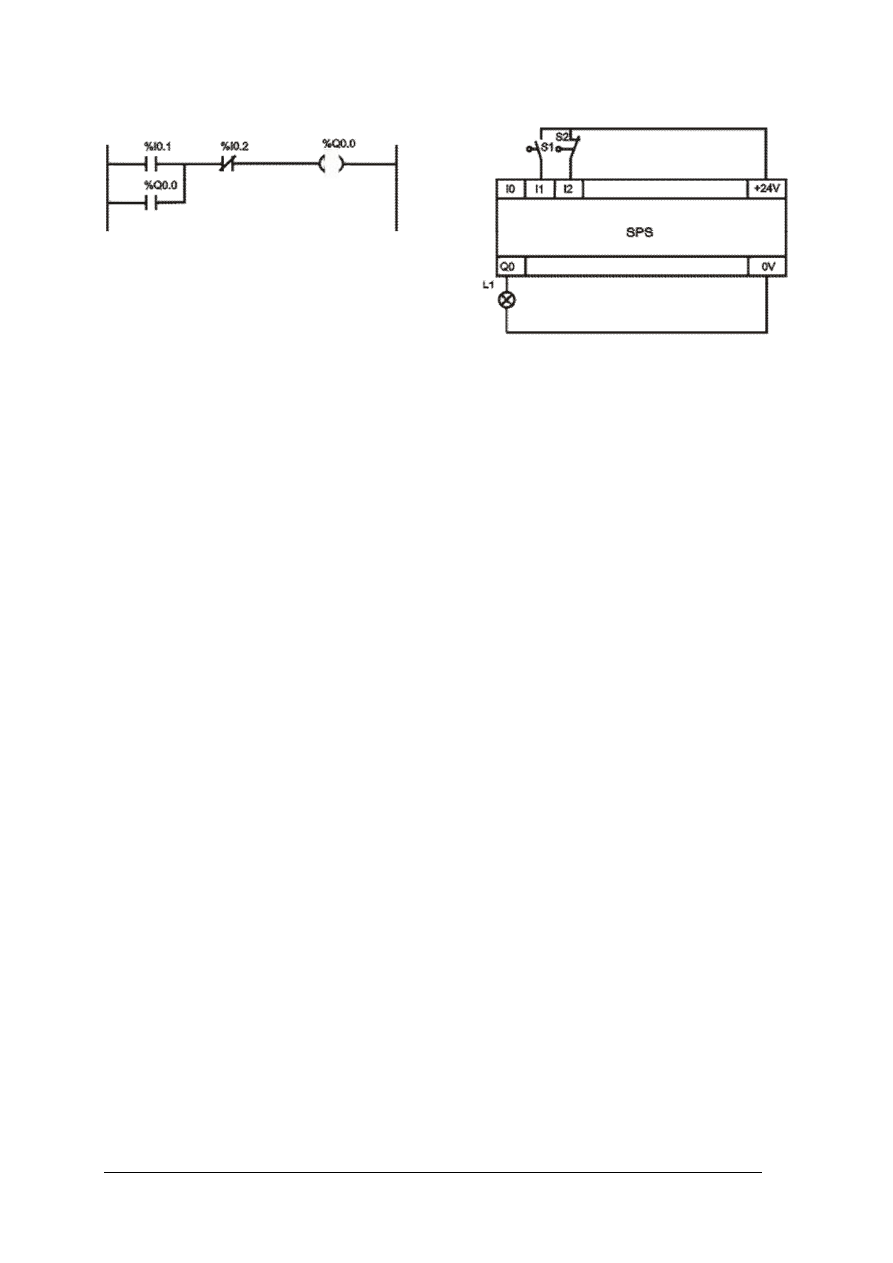
Przebadaj i przeanalizuj ze względu na wymogi bezpieczeństwa (odłączając kolejno
łączniki S1 i S2) trzy przypadki włączania i wyłączania urządzenia (lampka L1 powinna
zaświecić się po naciśnięciu przycisku S1 i wyłączyć po naciśnięciu przycisku S2): S1 i S2 są
łącznikami zwiernymi,
a) S1 i S2 są łącznikami rozwiernymi
b) S1 jest łącznikiem zwiernym i S2 łącznikiem rozwiernym
Zwróć szczególną uwagę na zachowanie się wyjścia sterownika, do którego może być
podłączone niebezpieczne dla obsługi urządzenie (np. prasa lub piła). Podczas testów odłączaj
od wejścia sterownika kolejno jeden z łączników. W prawdziwym układzie taka przerwa
może powstać po przerwaniu przewodu łączącego. Zastanów się, który z układów jest
bezpieczny, a który niebezpieczny i dlaczego?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
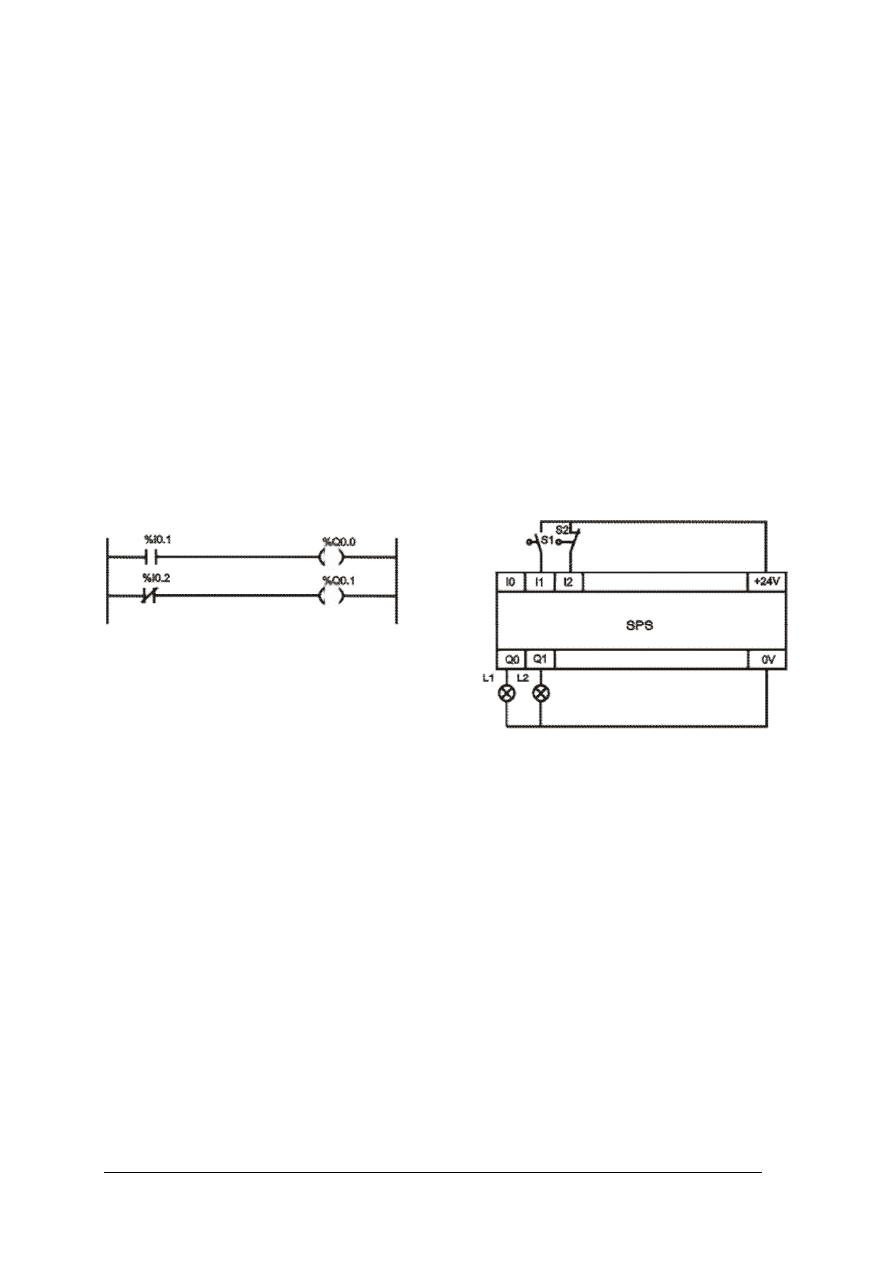
Przykładowe układy połączeń:
Przypadek a)
Rys. do ćwiczenia 4a
Przykładowy program (do rys. do ćwiczenia 4a):
LD
% I0.1
OR
% Q0.0
ANI
% I0.2: funkcja ANI została opisana w rozdziale 4.5.1.
OUT
% Q0.0
END
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) rozpoznać elementy na schemacie oraz zidentyfikować adresy wejść i wyjść
w sterowniku,
2) wybrać odpowiednie łączniki i połączyć je ze sterownikiem zgodnie ze schematem,
3) połączyć sterownik z komputerem przy pomocy specjalnego przewodu komunikacyjnego
(interfejsu),
4) włączyć komputer i sterownik do zasilania,
5) uruchomić oprogramowanie sterownika,
6) przepisać program w edytorze, zapisać go na dysku i przesłać do pamięci sterownika,
7) uruchomić sterownik,
8) przetestować pracę sterownika,
9) odłączyć przewód łączący przycisk S2 ze sterownikiem,
10) ponownie przetestować pracę sterownika,
11) spostrzeżenia zapisać w zeszycie i wyciągnąć wnioski,
12) wyłączyć sterownik i komputer,
13) odłączyć interfejs.
Wyposażenie stanowiska pracy:
−
komputer z oprogramowaniem do sterownika PLC,
−
stanowisko montażowe ze sterownikiem PLC,
−
DTR sterownika PLC,
−
interfejs do połączenia sterownika z komputerem,
−
łączniki zwierne i rozwierne,
−
lampki kontrolne,
−
przewody łączeniowe,
−
miernik uniwersalny wraz z przewodami pomiarowymi,
−
narzędzia monterskie.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
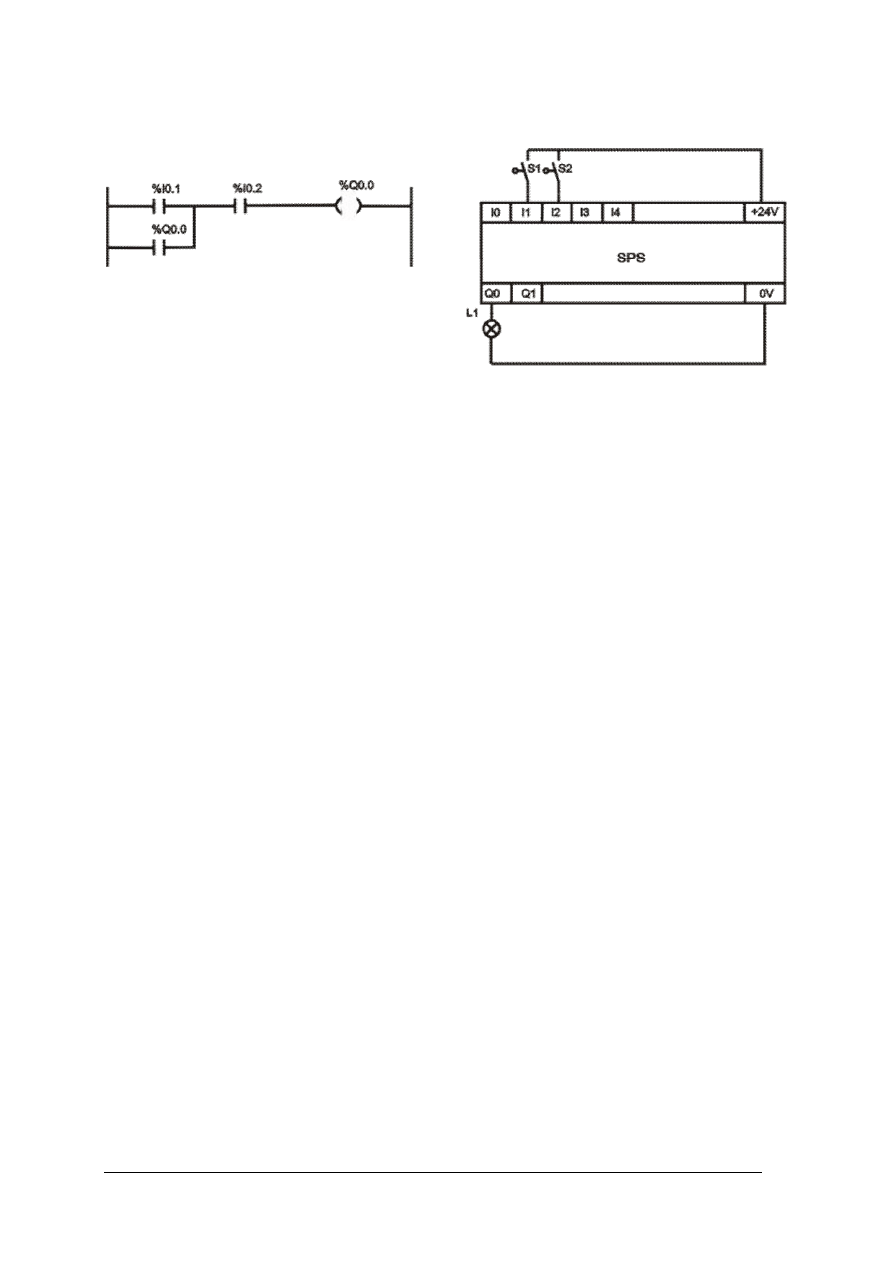
Przypadek b)
Rys. do ćwiczenia 4b
Przykładowy program (do rys. do ćwiczenia 4b):
LDN
%I0.1
OR
%Q0.0
AND
%I0.0
ST
%Q0.0
END
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) rozpoznać elementy na schemacie oraz zidentyfikować adresy wejść i wyjść
w sterowniku,
2) wybrać odpowiednie łączniki i połączyć je ze sterownikiem zgodnie ze schematem,
3) połączyć sterownik z komputerem przy pomocy specjalnego przewodu komunikacyjnego
(interfejsu),
4) włączyć komputer i sterownik do zasilania,
5) uruchomić oprogramowanie sterownika,
6) przepisać program w edytorze, zapisać go na dysku i przesłać do pamięci sterownika,
7) uruchomić sterownik,
8) przetestować pracę sterownika,
9) odłączyć przewód łączący przycisk S1 ze sterownikiem i obserwować zachowanie
lampki L1,
10) spostrzeżenia zapisać w zeszycie i wyciągnąć wnioski,
11) wyłączyć sterownik i komputer,
12) odłączyć interfejs.
Wyposażenie stanowiska pracy:
−
komputer z oprogramowaniem do sterownika PLC,
−
stanowisko montażowe ze sterownikiem PLC,
−
DTR sterownika PLC,
−
interfejs do połączenia sterownika z komputerem,
−
łączniki zwierne i rozwierne,
−
lampki kontrolne,
−
przewody łączeniowe,
−
miernik uniwersalny wraz z przewodami pomiarowymi,
−
narzędzia monterskie.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
Przypadek c)
Rys. do ćwiczenia 4c
Przykładowy program (do rys. do ćwiczenia 4c):
LD
% I0.1
OR
% Q0.0
AND
% I0.0
ST
% Q0.0
END
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) rozpoznać elementy na schemacie oraz zidentyfikować adresy wejść i wyjść
w sterowniku,
2) wybrać odpowiednie łączniki i połączyć je ze sterownikiem zgodnie ze schematem,
3) połączyć sterownik z komputerem przy pomocy specjalnego przewodu komunikacyjnego
(interfejsu),
4) włączyć komputer i sterownik do zasilania,
5) uruchomić oprogramowanie sterownika,
6) przepisać program w edytorze, zapisać go na dysku i przesłać do pamięci sterownika,
7) uruchomić sterownik,
8) przetestować pracę sterownika,
9) odłączyć przewód łączący przycisk S1 ze sterownikiem,
10) przetestować pracę sterownika,
11) odłączyć przewód łączący przycisk S2 ze sterownikiem (przewód łączący przycisk S1
jest podłączony),
12) przetestować pracę sterownika,
13) spostrzeżenia zapisać w zeszycie i wyciągnąć wnioski,
14) wyłączyć sterownik i komputer,
15) odłączyć interfejs.
Wyposażenie stanowiska pracy:
−
komputer z oprogramowaniem do sterownika PLC,
−
stanowisko montażowe ze sterownikiem PLC,
−
DTR sterownika PLC,
−
interfejs do połączenia sterownika z komputerem,
−
łączniki zwierne i rozwierne,
−
lampki kontrolne,
−
przewody łączeniowe,
−
miernik uniwersalny wraz z przewodami pomiarowymi,
−
narzędzia monterskie.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
4.2.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
wyjaśnić pojęcie cykl programowy?
2)
wyjaśnić pojęcie jedynka i zero logiczne?
3)
wyjaśnić pojęcie iloczyn logiczny?
4)
wyjaśnić pojęcie suma logiczna?
5)
wyjaśnić pojęcie styk zwierny?
6)
wyjaśnić pojęcie styk rozwierny?
7)
wpisać program do sterownika?
8)
połączyć urządzenia wejścia i wyjścia zgodnie ze schematem?
9)
uruchomić sterownik z wpisanym programem?
10) przetestować poprawność działania programu?
11) wyjaśnić pojęcie pamięć RAM?
12) wyjaśnić pojęcie pamięć EEPROM?
13) dobrać łączniki do załączania i wyłączania zgodnie
z zasadami bezpieczeństwa?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
4.3. Elektryczne
układy
wykonawcze
współpracujące
ze sterownikami
4.3.1. Materiał nauczania
Stycznik jest elementem elektromagnetycznym, którego cechuje przede wszystkim duża
trwałość mechaniczna oraz duża częstość łączeń, przy stosunkowo małych wymiarach,
niewielkiej masie i wysokiej pewności działania. Stycznik zbudowany jest z następujących
elementów:
−
izolacyjna podstawa stycznika,
−
rdzeń nieruchomy,
−
cewka stycznika,
−
zwora ruchoma elektromagnesu,
−
styk nieruchomy,
−
styk ruchomy (połączony ze zworą ruchomą elektromagnesu),
−
styki zwierne i rozwierne, umieszczone w torach prądowych pomocniczych,
−
sprężyny stykowe zapewniające docisk styków,
−
komory gaszeniowe łuku elektrycznego.
Stycznikiem elektromagnetycznym nazywamy wyłącznik, którego jedne pary styków
zamykają się, a drugie otwierają pod działaniem elektromagnesu, stanowiącego integralną
część stycznika. Zmiana położenia styków następuje po przerwaniu obwodu zasilającego
elektromagnes, pod działaniem ciężaru zwory i siły sprężyny. Elektromagnes stycznika musi
rozwijać wystarczającą siłę, aby po pokonaniu sił starających się otworzyć styki, zapewnić
należyty docisk między stykami. Najważniejszymi zaletami styczników, które spowodowały
powszechne stosowanie tych aparatów, są:
1) małe natężenie prądu sterującego (prąd w obwodzie cewki stycznika). Elektromagnes
stycznika średniej mocy pobiera prąd kilku dziesiątych części ampera. Pozwala to na
stosowanie w obwodach sterujących stycznika małych przycisków sterujących,
podobnych do przycisków do dzwonków elektrycznych, przekaźników termicznych
zabezpieczających silnik przed skutkami przeciążenia, wreszcie małych i stosunkowo
prostych aparatów sterowania automatycznego, jak: wyłączniki krańcowe, przekaźniki
pomocnicze, przekaźniki czasowe, ciśnieniowe itd. Z uwagi na małe natężenie prądu
w obwodzie sterującym stycznika, stosuje się przewody o małym przekroju, a mimo to
obwody te mogą być, dowolnie długie, co umożliwia w pełni stosowanie tzw. sterowania
zdalnego, w którym impuls sterujący następuje w znacznej odległości od silnika czy
aparatu sterowanego. Dzięki temu możemy umieszczać elementy sterujące w miejscu
najdogodniejszym dla obsługi,
2) dużą liczbę włączeń w jednostce czasu (do kilku tysięcy na godzinę),
3) dużą szybkość reakcji stycznika na impuls sterujący. Czas upływający od chwili
zamknięcia obwodu sterującego do chwili zamknięcia obwodu sterowanego (zamknięcia
styków głównych) mierzy się w setnych częściach sekundy,
4) samoczynne opadanie zwory, gdy napięcie zasilające spadnie wyraźnie poniżej napięcia
znamionowego. Spowoduje to odłączenie napięcia zasilania od urządzenia (np. silnika),
który wtedy zatrzymuje się. Jednakże, gdy napięcie w sieci powróci do wartości
normalnej, silnik zostanie włączony ponownie dopiero po świadomym załączeniu
stycznika (naciśnięciu przycisku).
Styczniki służące do załączania i wyłączania trójfazowych silników indukcyjnych
są wykonywane jako trójbiegunowe, to znaczy mają trzy pary styków.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
Przepisy wymagają, aby elektromagnesy styczników pracowały nienagannie przy
napięciu wyższym od znamionowego o 10% i stycznik załączał prawidłowo przy napięciu
obniżonym o 15%. Ten ostatni warunek jest szczególnie ważny, ponieważ w momencie
zamykania styków stycznika duży prąd rozruchu pobierany przez załączany silnik może
spowodować kilkuprocentowy spadek napięcia w sieci, a zjawisko to nie powinno wywołać
żadnych zakłóceń w pracy stycznika. Poza stycznikami elektromagnetycznymi produkowane
są również styczniki elektroniczne, które są elementami elektronicznymi służącymi do
zdalnego bezstykowego załączania obwodów elektrycznych, spełniają te same zadania, co
styczniki elektromagnetyczne. Elementami łączeniowymi obwodów mocy są elementy
elektroniczne: triaki, tranzystory lub tyrystory.
Rozróżniamy dwa rodzaje zasilania styczników:
−
jednofazowe,
−
trójfazowe.
Ze względu na rodzaj sterowania dzielimy je na:
−
sterowane prądem stałym,
−
sterowane prądem przemiennym.
Przekaźnik – urządzenie elektromagnetyczne, elektroniczne lub cyfrowe służące
do przełączania określonych styków w obwodzie automatyki. Mogą reagować na
odpowiednie parametry wielkości wejściowej. Przykładowo, przekaźnik nadprądowy pobudzi
się (zadziała) wtedy, gdy płynący przezeń prądu przekroczy nastawioną na przekaźniku
wartość, czyli kryterium zadziałania wygląda następująco: I > Ir, przy czym Ir jest wielkością
nastawioną przekaźnika (tzw. wartością rozruchową).
Rozróżnia się przekaźniki nadmiarowe (reagujące na wzrost wielkości mierzonej),
jak i niedomiarowe (reagujące na spadek wielkości mierzonej poniżej określonego poziomu).
Przekaźniki mogą reagować nie tylko na sygnały typu prąd czy napięcie, ale także
na temperaturę, częstotliwość, ciśnienie itp. Przekaźniki działają na zasadzie identycznej jak
styczniki i dlatego ich zasada działania nie będzie ponownie opisywana. Mają jednak
znacznie mniejsze prądy łączeniowe w obwodach sterowanych. Znacznie mniejsze są również
prądy w obwodzie sterowania (obwód cewki elektromagnesu), krótsze czasy łączenia styków
i mniejsze wymiary oraz masa. Przekaźniki czasowe są to przekaźniki, których obwód
sterowania realizuje różnego rodzaju funkcje czasowe, np. opóźnione załączanie, opóźnione
wyłączanie, impulsowanie itp.).
W obwodach sterowania i automatyki często stosuje się skomplikowane systemy
przekaźnikowe. Przekaźnik może reagować na wzrost prądu, kolejny na spadek napięcia, zaś
inny pobudzi się dopiero wtedy, gdy zadziałają poprzednie dwa. Dzięki temu można stosować
złożone systemy decyzyjne. Przy współpracy przekaźników ze sterownikami (o ile
możliwości sterownika na to pozwalają) złożone systemy decyzyjne wypracowane są przez
sterownik a nie przekaźnik. W automatyce elektroenergetycznej przekaźniki stosowane są do
ochrony obiektów przed skutkami zwarć i niepożądanych zjawisk.
Wiedząc, że podczas zwarcia zazwyczaj znacznie rośnie prąd, można zabezpieczyć
obiekt przed skutkami zwarć włączając w obwód przekaźnik nadprądowy. Jeżeli prąd
w obwodzie wzrośnie powyżej nastawionej wartości (np. 120% wartości znamionowej),
przekaźnik pobudzi się i zewrze obwód cewki wyłącznika. To spowoduje otwarcie
wyłącznika i tym samym przerwanie obwodu głównego, w którym płynie prąd zwarciowy.
Jednocześnie ten sam przekaźnik może zewrzeć obwód sygnalizacyjny, informując o awarii,
oraz np. doprowadzić do pobudzenia innych przekaźników, odpowiedzialnych za załączenie
zasilania rezerwowego.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
Silnik krokowy to silnik elektryczny, w którym impulsowe zasilanie prądem
elektrycznym powoduje, że jego wirnik nie obraca się ruchem ciągłym, lecz wykonuje
za każdym razem ruch obrotowy o ściśle ustalonym kącie. Oś silnika krokowego obraca się
o niewielkie przyrosty kąta pod wpływem impulsów elektrycznych podawanych
w odpowiedniej kolejności. Dzięki temu, kierunek obrotów osi jest ściśle związany
z sekwencją podawanych impulsów. Prędkość, kąt obrotu wirnika jest ściśle zależny od liczby
dostarczonych impulsów prądowych, a prędkość kątowa wirnika jest dokładnie równa
częstotliwości impulsów pomnożonej przez wartość kąta obrotu wirnika w jednym cyklu
pracy silnika. Kąt obrotu wirnika pod wpływem jednego impulsu może mieć różną wartość
od kilku do kilkudziesięciu stopni. Silniki krokowe, zależnie od przeznaczenia są
przystosowane do wykonywania od ułamków obrotu do nawet kilku tysięcy obrotów
na sekundę.
Poziom mocy silników sterowanych przy pomocy układów scalonych mieści się zwykle
w zakresie od poniżej 1W dla bardzo małych silników, do 10–20W dla większych. Możemy
wyznaczyć maksymalny poziom wydzielanej mocy z zależności P=U·I. Na przykład, gdy
silnik jest zasilany napięciem 12 V przy prądzie 1 A na fazę, wydziela się na nim moc 24 W
(przy zasilaniu obu faz). Obecnie istnieje duża liczba różnorodnych typów silników
krokowych i z czasem pojawiają się następne. Wyróżniamy trzy podstawowe typy silników
krokowych pod względem budowy:
−
silnik z magnesem trwałym,
−
silnik o zmiennej reluktancji,
−
silnik hybrydowy.
Silniki krokowe są stosowane wszędzie tam, gdzie kluczowe znaczenie ma możliwość
precyzyjnego sterowania kątem, prędkością, pozycją itp.:
−
w szeroko rozumianej automatyce – w mechanicznych urządzeniach regulacyjnych
(np. automatycznych zaworach)
−
w urządzeniach pomiarowych np. zegarach elektronicznych do przesuwu wskazówek,
−
w robotyce – do sterowania ruchem ramion robotów, kół w automatycznych wózkach
widłowych itp.,
−
w komputerach – np. w twardych dyskach, gdzie zadaniem silnika jest zapewnienie ruchu
głowicy odczytująco – zapisującej po prostej radialnej w stosunku do talerzy pokrytych
nośnikiem magnetycznym,
−
w drukarkach, ploterach, faksach,
−
w sprzęcie medycznym i wielu innych.
Zalety silników krokowych:
−
kąt obrotu silnika jest proporcjonalny do ilości impulsów wejściowych,
−
silnik pracuje z pełnym momentem zaraz po zasileniu uzwojeń,
−
precyzyjne pozycjonowanie i powtarzalność ruchu – dobre silniki krokowe mają
dokładność ok. 3–5% kroku i błąd nie kumuluje się z kroku na krok,
−
możliwość bardzo szybkiego rozbiegu, hamowania i zmiany kierunku,
−
niezawodne – ze względu na brak szczotek, żywotność silnika zależy tylko
od żywotności łożysk,
−
zależność obrotów silnika od dyskretnych impulsów umożliwia sterowanie w pętli
otwartej, przez co silnik krokowy jest łatwiejszy i tańszy w sterowaniu,
−
możliwość osiągnięcia bardzo niskich prędkości synchronicznych obrotów z obciążeniem
umocowanym bezpośrednio na osi,
−
szeroki zakres prędkości obrotowych uzyskiwany dzięki temu, że prędkość jest
proporcjonalna do częstotliwości impulsów wejściowych.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
Jedną z najbardziej znaczących zalet silnika krokowego jest możliwość dokładnego
sterowania w pętli otwartej. Praca w pętli otwartej oznacza, że nie potrzeba sprzężenia
zwrotnego – informacji o położeniu. Takie sterowanie eliminuje potrzebę stosowania
kosztownych urządzeń sprzężenia zwrotnego, takich jak enkodery optoelektroniczne. Pozycję
znajduje się zliczając impulsy wejściowe.
Wady silników krokowych:
−
rezonanse mechaniczne pojawiające się przy niewłaściwym sterowaniu,
−
trudności podczas pracy z bardzo dużymi prędkościami.
Sterowanie silnika krokowego odbywa się przez doprowadzanie do odpowiednich
uzwojeń sterujących i w odpowiedniej kolejności napięć zasilających. Najprostszym
sposobem sterowania silnikiem krokowym jest sterowanie jednofazowe. Polega ono na tym,
że w danej chwili zasilane jest tylko jedno uzwojenie sterujące silnika. Jeżeli jest to silnik
o czterech uzwojeniach sterujących tak jak pokazuje rys. 11 i tabela 2 to po czterech krokach
cała sekwencja powtarza się. Sterowanie kierunkiem obrotów oraz wykonaniem określonej
liczby kroków odbywa się poprzez odpowiedni dobór algorytmu programu.
Rys. 11. Zasilanie uzwojeń silnika krokowego [opracowanie własne]
Tabela 2. Sterowanie jednofazowe silnika krokowego [opracowanie własne]
Kroki
1
2
3
4
5
L1
1
0
0
0
1
L2
0
1
0
0
0
L3
0
0
1
0
0
U
zw
o
je
n
ie
L4
0
0
0
1
0
0 – przełącznik wyłączony 1– przełącznik włączony
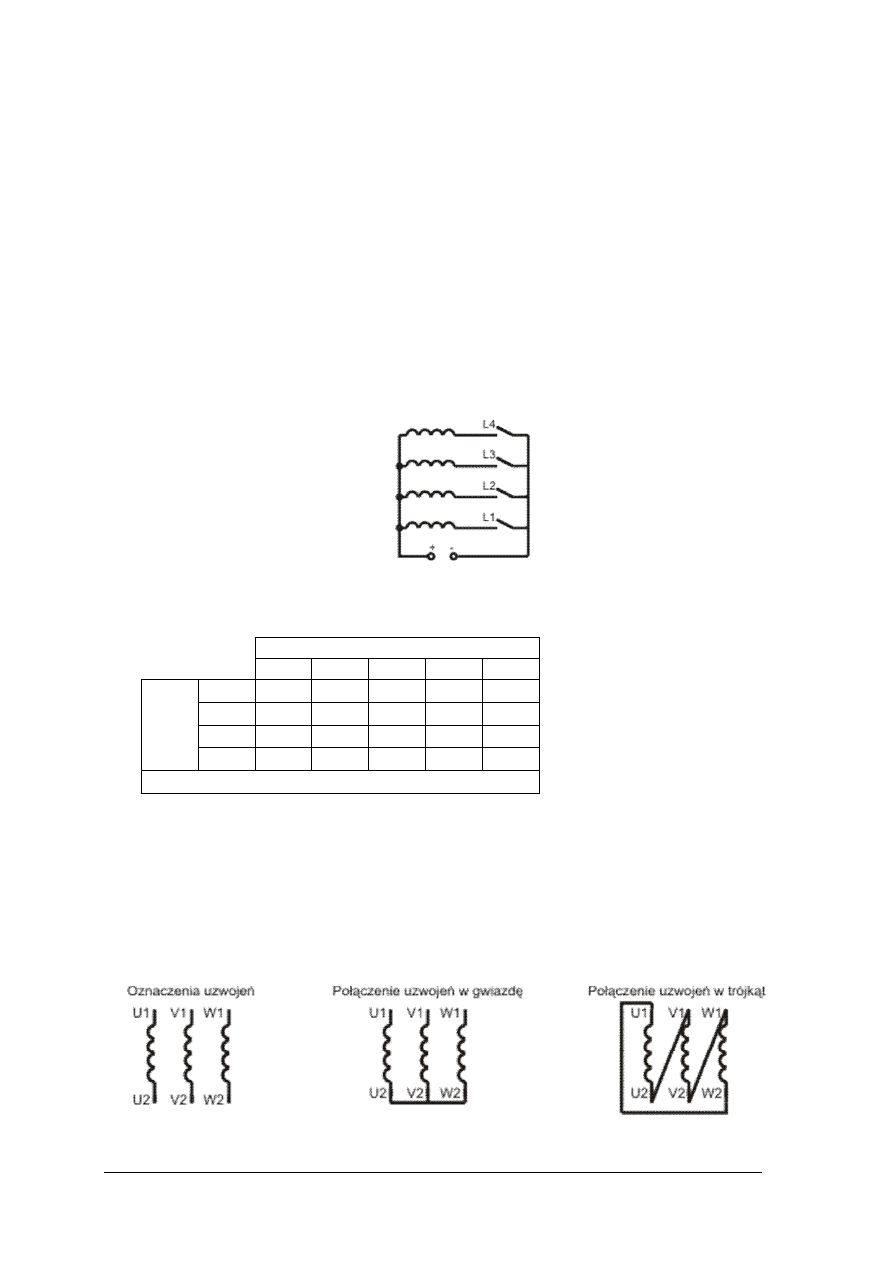
W układach napędowych z zastosowaniem silników trójfazowych problemem jest bardzo
duży prąd pobierany z sieci zasilającej podczas rozruchu silnika. Aby zmniejszyć prąd
rozruchu silnika trójfazowego stosuje się przełącznik gwiazda – trójkąt. Zasada rozruchu przy
pomocy tegoż przełącznika polega na tym, że zaraz po włączeniu zasilania uzwojenia silnika
połączone są w gwiazdę, dzięki czemu prąd rozruchowy zmniejsza się 1,73 razy i po kilku
sekundach, gdy silnik już się obraca, uzwojenia silnika zostają przełączone w trójkąt (rys. 12).
Silnik przy połączeniu w gwiazdę pobiera mniejszy prąd rozruchowy, ale posiada przy tym
połączeniu 3 razy mniejszą moc w porównaniu z połączeniem uzwojeń w trójkąt.
Rys. 12. Oznaczenia i sposoby łączenia uzwojeń silnika 3–fazowego [opracowanie własne]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
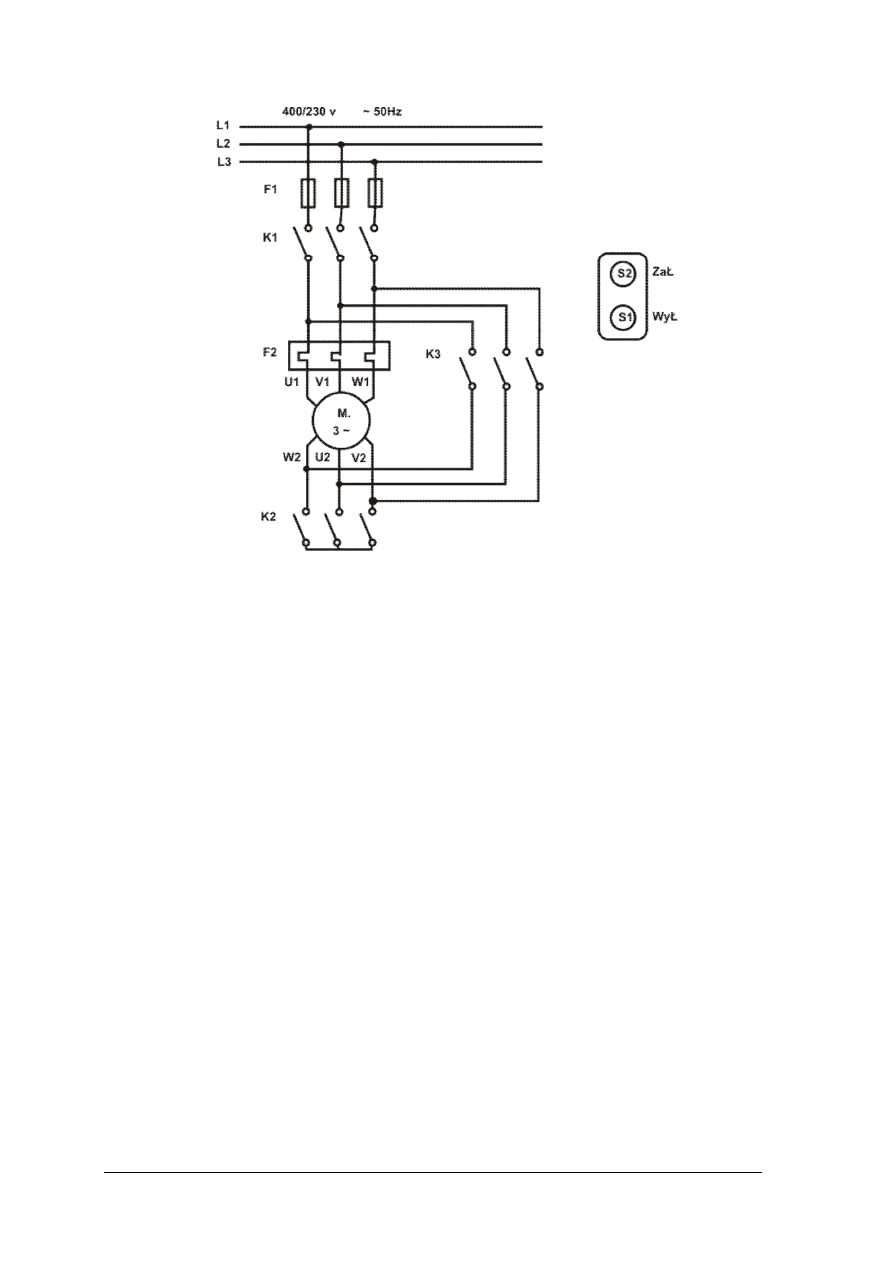
Na rysunku 13 przedstawiono schemat ideowy rozruchu silnika w układzie gwiazda –
trójkąt. Styczniki K1, K2 i K3 załączane są przez sterownik. W pierwszej chwili
po załączeniu zasilania (naciśnięcie przycisku zwiernego S2) załączone zostają styczniki K1
i K2. Odbywa się rozruch silnika przy uzwojeniach połączonych w gwiazdę. Po kilku
sekundach (czas ustawiony jest w module czasowym sterownika) rozłącza się stycznik K2
i załącza się stycznik K3. Teraz uzwojenia silnika połączone są w trójkąt i pracuje on z pełną
mocą. UWAGA! Podczas przełączania styczników nie można dopuścić, aby załączył się
stycznik K3 zanim rozłączy się stycznik K2, ponieważ spowodowałoby to zwarcie zasilania.
Wyłączenie silnika odbywa się po naciśnięciu przycisku rozwiernego S1. Po naciśnięciu
wyłącznika S1 rozłączają się wszystkie 3 styczniki i silnik z powodu braku zasilania
zatrzymuje się.
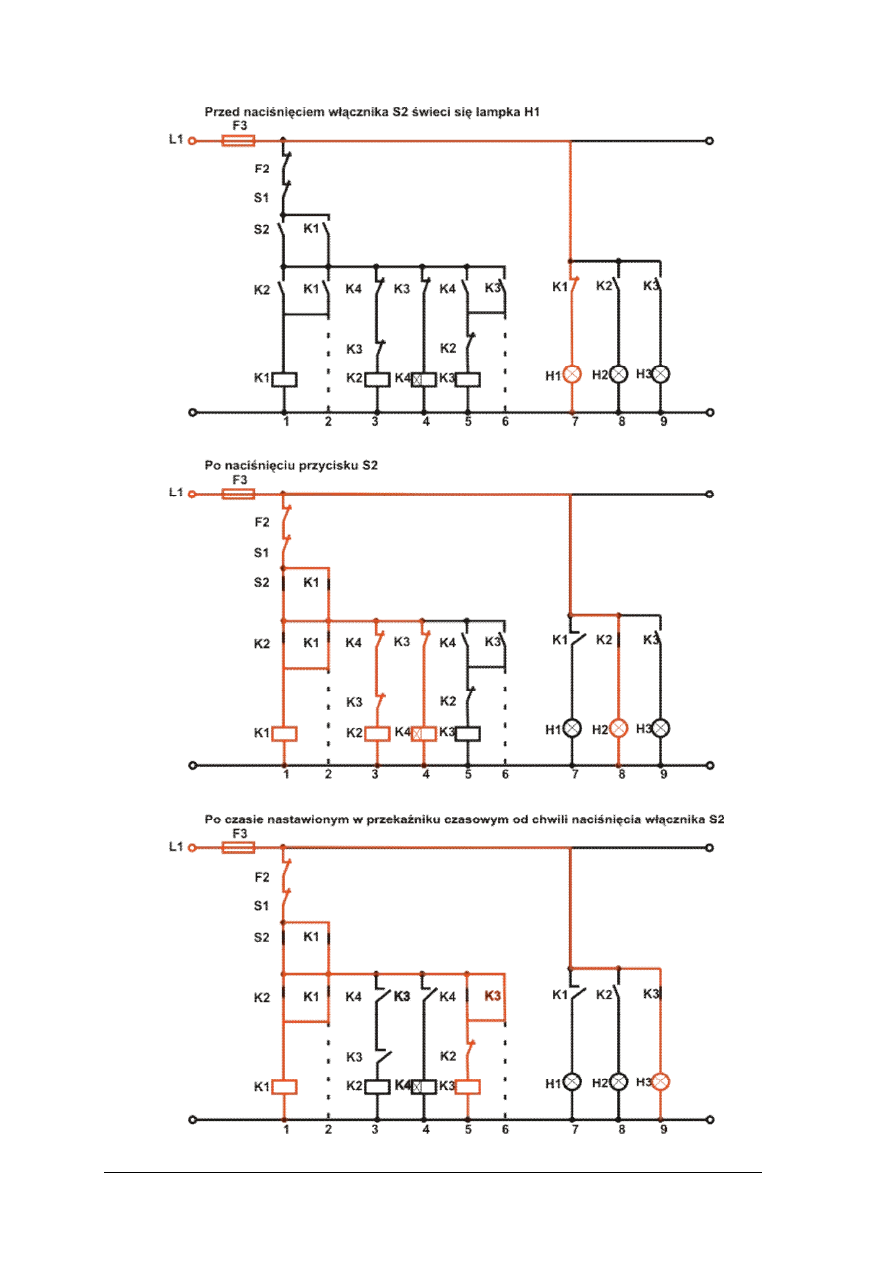
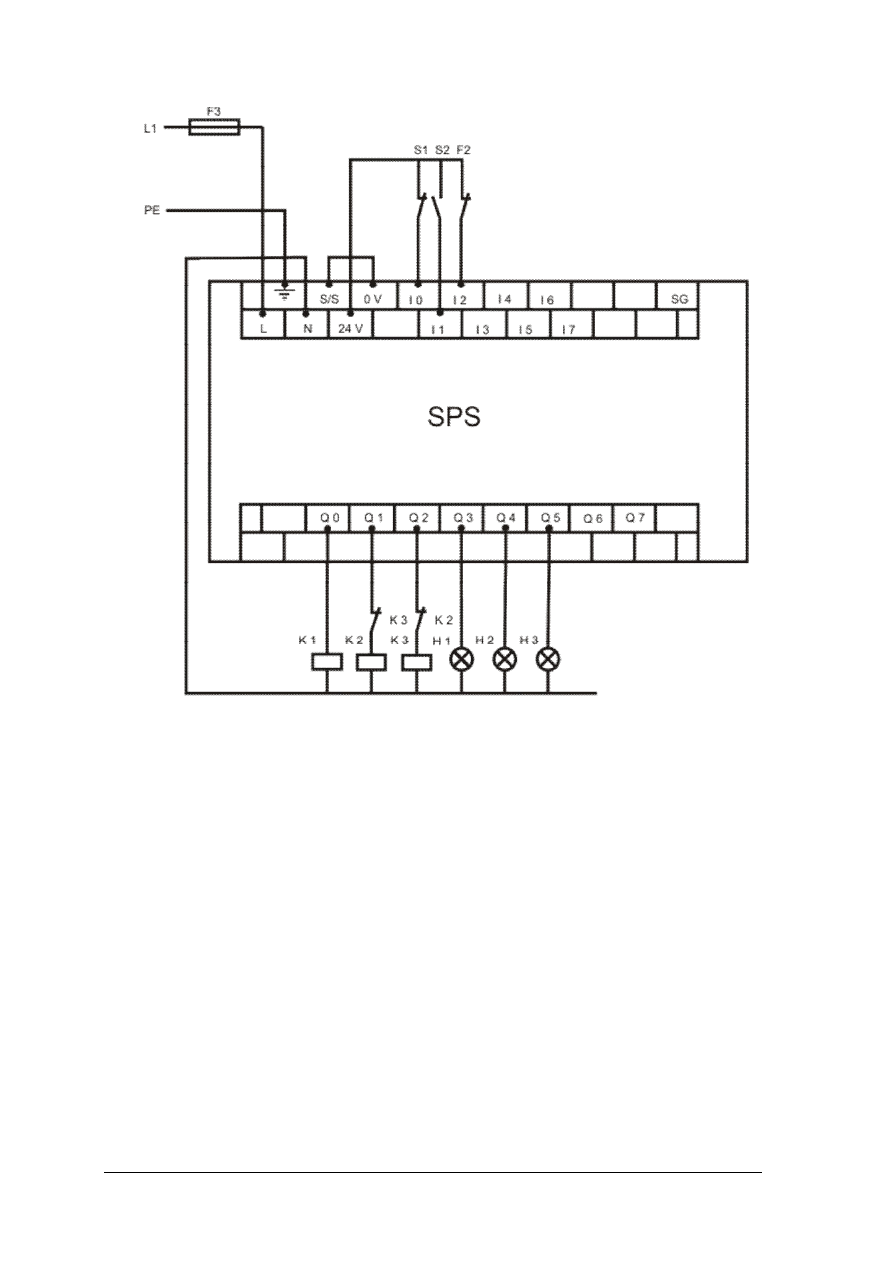
Na rysunku 14 przedstawiono schemat funkcjonalny rozruchu silnika trójfazowego
w układzie gwiazda–trójkąt. Na schemacie przedstawiono styki w czasie, gdy nie załączono
jeszcze silnika (nie naciśnięto łącznika zwiernego S2). Przed naciśnięciem włącznika S2 prąd
płynie w obwodzie L1, przez bezpiecznik topikowy F3, styk rozwierny przekaźnika K1
(obwód nr 7), lampkę H1, co powoduje, że lampka H1 świeci się. Po naciśnięciu łącznika S2
prąd popłynie w obwodzie L1, bezpiecznik topikowy F3, bezpiecznik termiczny F2,
wyłącznik S1, włącznik S2 (został naciśnięty) (obwód nr 1), styk rozwierny przekaźnika K4,
styk rozwierny przekaźnika K3, cewkę przekaźnika K2 (obwód nr 3). Zasilona cewka
przekaźnika K2 przyciągnie (zewrze) styki zwierne K2 i rozłączy styki rozwierne K2.
Spowoduje to załączenie cewki przekaźnika K1 (w obwodzie 1) i zwarcie styków zwiernych
przekaźnika K1 i rozwarcie styków rozwiernych przekaźnika K1. Zgaśnie świecąca się
wcześniej lampka H1 i zapali się lampka H2 (obwód nr 8), a cewka przekaźnika K1 będzie
zasilana mimo rozłączenia włącznika S2, ponieważ styk ten będzie zwarty poprzez styk K1
(obwód nr 1). Ten stan odpowiada załączeniu silnika trójfazowego w połączeniu w gwiazdę
(załączone styczniki K1 i K2 na rysunku 13). Równocześnie z załączeniem silnika
skojarzonego w gwiazdę załączy się przekaźnik czasowy K4 (obwód nr 4). Po upływie
nastawionego czasu w przekaźniku czasowym K4 zwierają się styki zwierne K4 i rozwierają
się styki rozwierne K4. Rozłączone zostaje zasilanie cewki przekaźnika K2 (obwód nr 3), co
powoduje załączenie przekaźnika K3 i rozłączenie przekaźnika czasowego K4. Gaśnie teraz
lampka H2 i zapala się lampka H3. Silnik zostaje przełączony w trójkąt (załączone styczniki
K1 i K3 na rysunku 13). Wyłączenie silnika odbywa się po naciśnięciu wyłącznika S1.
Sposób podłączenia poszczególnych elementów układu ze sterownikiem pokazuje rys. 15.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
Rys. 13. Schemat ideowy rozruchu silnika w układzie gwiazda – trójkąt
[opracowanie własne]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
Rys. 14. Schemat funkcjonalny rozruchu silnika w układzie gwiazda – trójkąt [opracowanie własne]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
Rys. 15. Podłączenie do SPS realizującego rozruch silnika w układzie gwiazda –
trójkąt [opracowanie własne]
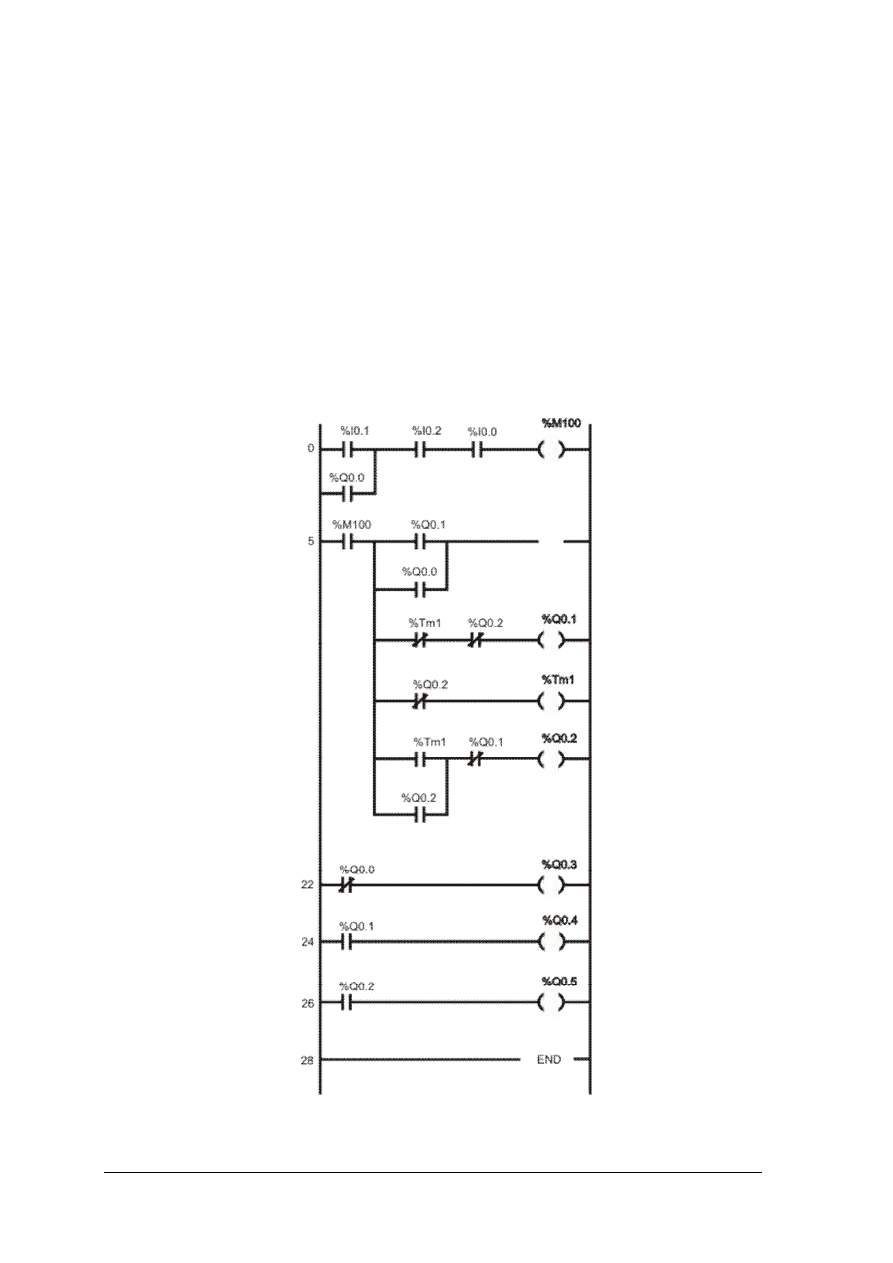
Listing programu w języku List
0
LD
% I0.1
1
OR
% Q0.0
2
AND % I0.2
3
AND % I0.0
4
ST
% M100
5
LD
% M100
6
MPS
7
AND % Q0.1
8
OR
% Q0.0
9
ST
% Q0.0
10
MRD
11
ANDN TM1Q
12
ANDN % Q0.2
13
ST
% Q0.1
14
MRD
15
ANDN % Q0.2
16
IN
% TM1
; (wartość czasu ustawiamy w konfiguracji modułu czasowego)
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
27
MPP
28
AND % TM1
29
OR
% Q0.2
20
ANDN % Q0.1
21
ST
% Q0.2
22
LDN % Q0.0
23
ST
% Q0.3
24
LD
% Q0.1
25
ST
% Q0.4
26
LD
% Q0.2
27
ST
% Q0.5
28
END
Na rysunku 16 przedstawiono równoważny program w języku drabinkowym.
Rys. 16.
Program w języku drabinkowym [opracowanie własne]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jak zbudowany jest stycznik?
2. Jak działa stycznik i przekaźnik?
3. Jakie są zalety styczników?
4. Gdzie stosujemy zabezpieczenia przekaźnikowe?
5. Przed jakimi skutkami możemy zabezpieczać obwody przy pomocy przekaźników?
6. Czym różni się silnik krokowy od silnika prądu stałego?
7. W jakich urządzeniach stosujemy silniki krokowe?
8. Na czym polega rozruch silnika trójfazowego w układzie gwiazda – trójkąt?
4.3.3. Ćwiczenia
Ćwiczenie 1
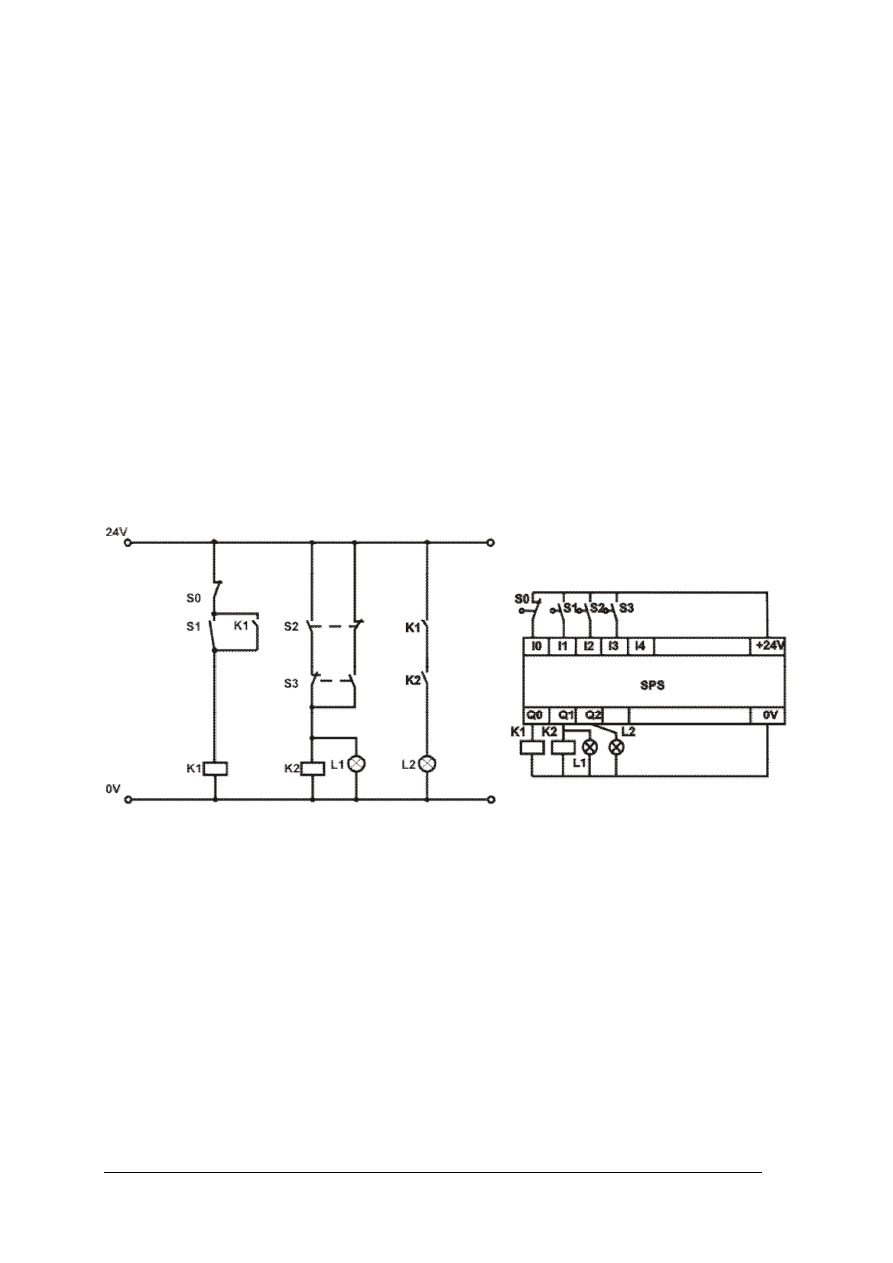
Uruchom układ sterowania dwoma przekaźnikami. Przeanalizuj działanie układu
przedstawionego na schemacie elektrycznym. Przyporządkuj oznaczenia symboliczne ze
schematu adresom sterownika i przepisz program w postaci listy rozkazów lub w języku
drabinkowym odpowiadający schematowi elektrycznemu do sterownika za pomocą
odpowiedniego oprogramowania.
Rys. do ćwiczenia 1
Przykładowy program (do rys. do ćwiczenia 1):
LD
% I0.1
OR
% Q0.0
AND
% I0.0
ST
% Q0.0
LD
% I0.2
ANDN
% I0.3
OR
% I0.3
ANDN
% I0.2
ST
% Q0.1
LD
% Q0.0
AND
% Q0.1
ST
% Q0.2
END

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) rozpoznać elementy na schemacie oraz zidentyfikować adresy wejść i wyjść
w sterowniku,
2) wybrać odpowiednie łączniki i połączyć je ze sterownikiem zgodnie ze schematem,
3) połączyć sterownik z komputerem przy pomocy specjalnego przewodu komunikacyjnego
(interfejsu),
4) włączyć komputer i sterownik do zasilania,
5) uruchomić oprogramowanie sterownika,
6) przepisać program w edytorze, zapisać go na dysku i przesłać do pamięci sterownika,
7) uruchomić sterownik,
8) przetestować pracę sterownika,
9) odłączyć przewód łączący przycisk S1 ze sterownikiem,
10) przetestować pracę sterownika,
11) odłączyć przewód łączący przycisk S2 ze sterownikiem (przewód łączący przycisk S1
jest podłączony),
12) przetestować pracę sterownika,
13) spostrzeżenia zapisać w zeszycie i wyciągnąć wnioski,
14) wyłączyć sterownik i komputer,
15) odłączyć interfejs.
Wyposażenie stanowiska pracy:
−
komputer z oprogramowaniem do sterownika PLC,
−
stanowisko montażowe ze sterownikiem PLC,
−
DTR sterownika PLC,
−
interfejs do połączenia sterownika z komputerem,
−
łączniki zwierne i rozwierne,
−
lampki kontrolne,
−
przewody łączeniowe,
−
miernik uniwersalny wraz z przewodami pomiarowymi,
−
narzędzia monterskie.
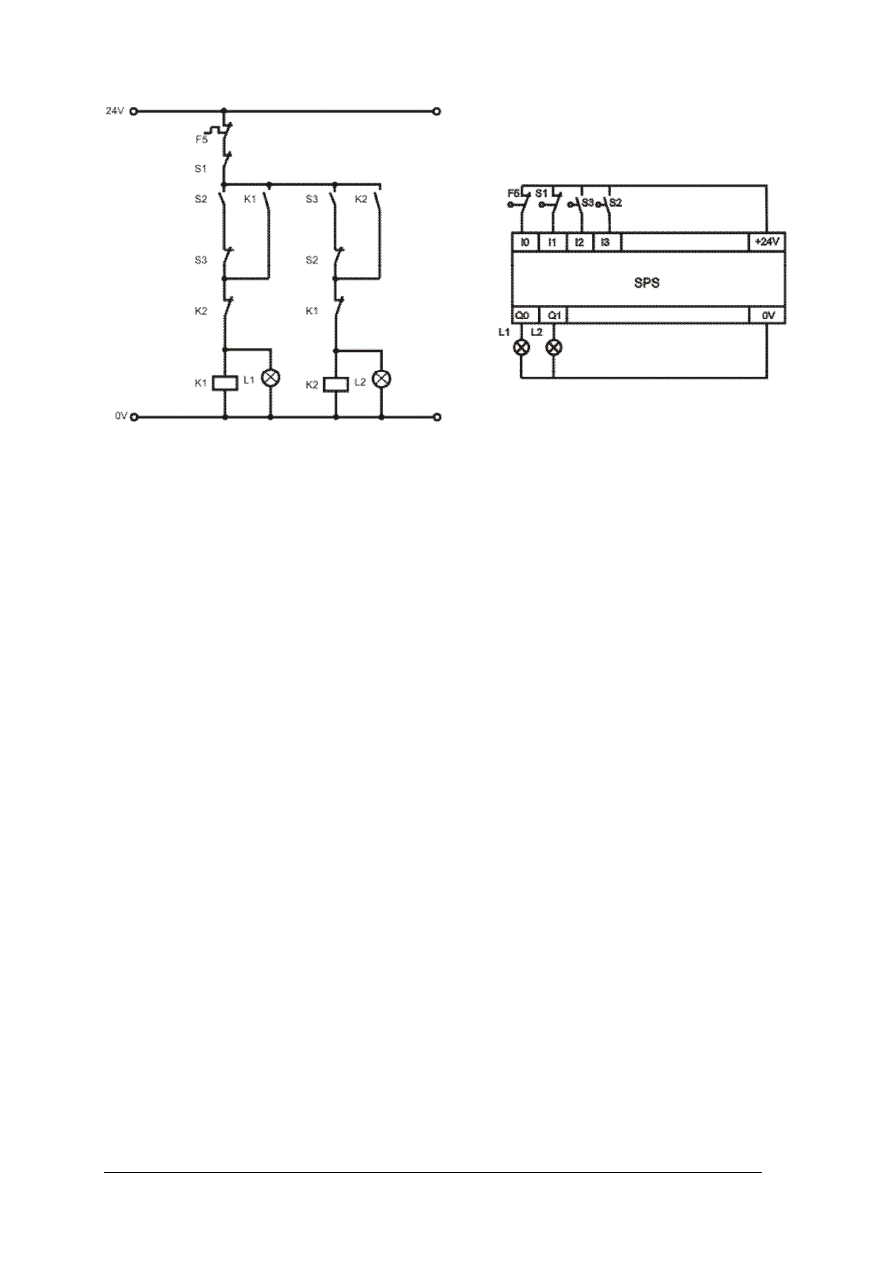
Ćwiczenie 2
Zrealizuj za pomocą sterownika sterowanie stycznikowe LEWO/PRAWO. Przeanalizuj
działanie układu przedstawionego na schemacie elektrycznym. Przyporządkuj oznaczenia
symboliczne ze schematu adresom sterownika i napisz program w postaci listy rozkazów lub
w języku drabinkowym odpowiadający schematowi elektrycznemu.
Wskazówka do ćwiczenia. Kierunek wirowania silnika wybieramy przy nieruchomym
silniku. Załączenie silnika może odbywać się za pomocą włącznika S2 (obroty w prawo)
lub S3 (obroty w lewo). Łącznik S1 służy do wyłączenia silnika. Analizując działanie układu
zwróć uwagę, w jaki sposób zrealizowana jest blokada zmiany kierunku obrotów podczas
pracy (wirowania silnika).
Uwaga!!!
Przyciski S2 i S3 są przyciskami zwiernymi podobnie jak styki K1 i K2.
Ich reprezentacja na schemacie jako styki rozwierne jest tylko wirtualna (uwzględniona
w programie sterownika). Łącznik F5 to bezpiecznik sprzętowy. Pamiętaj, że w razie potrzeby
możesz poprosić o pomoc nauczyciela.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
Rys. do ćwiczenia 2
Przykładowy program (do rys. do ćwiczenia 2):
LD
% I0.3
ANDN
% I0.2
OR
% Q0.0
ANDN
% Q0.1
AND
% I0.1
AND
% I0.0
ST
% Q0.0
LD
% I0.2
ANDN
% I0.3
OR
% Q0.1
AND
% Q0.0
AND
% I0.1
AND
% I0.0
ST
% Q0.1
END
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) rozpoznać elementy na schemacie oraz zidentyfikować adresy wejść i wyjść
w sterowniku,
2) wybrać odpowiednie łączniki i połączyć je ze sterownikiem zgodnie ze schematem,
3) połączyć sterownik z komputerem przy pomocy specjalnego przewodu komunikacyjnego
(interfejsu),
4) włączyć komputer i sterownik do zasilania,
5) uruchomić oprogramowanie sterownika,
6) przepisać program w edytorze, zapisać go na dysku i przesłać do pamięci sterownika,
7) uruchomić sterownik,
8) przetestować pracę sterownika,
9) odłączyć przewód łączący przycisk S1 ze sterownikiem,
10) przetestować pracę sterownika,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
11) odłączyć przewód łączący przycisk S2 ze sterownikiem (przewód łączący przycisk S1
jest podłączony),
12) przetestować pracę sterownika,
13) spostrzeżenia zapisać w zeszycie i wyciągnąć wnioski,
14) wyłączyć sterownik i komputer,
15) odłączyć interfejs.
Zalecane metody nauczania–uczenia się:
−
ćwiczenia laboratoryjne.
Wyposażenie stanowiska pracy:
−
komputer z oprogramowaniem do sterownika PLC,
−
stanowisko montażowe ze sterownikiem PLC,
−
DTR sterownika PLC,
−
interfejs do połączenia sterownika z komputerem,
−
łączniki zwierne i rozwierne,
−
lampki kontrolne,
−
przewody łączeniowe,
−
miernik uniwersalny wraz z przewodami pomiarowymi,
−
narzędzia monterskie.
4.3.4. Sprawdzian postępów
Czy potrafisz
Tak Nie
1)
wyjaśnić jak działa stycznik?
2)
wyjaśnić jak działa przekaźnik?
3)
wyjaśnić jak działa silnik krokowy?
4)
wyjaśnić jak działa silnik trójfazowy?
5)
wyjaśnić jak działa rozruch silnika trójfazowego w układzie gwiazda
trójkąt?
6)
wyjaśnić jak działa styk wirtualny i rzeczywisty?
7)
wyjaśnić działanie układu przedstawionego na schemacie?
8)
rozróżnić styk wirtualny od rzeczywistego?
9)
uruchomić sterownik z wpisanym programem i przetestować działanie
układu sterowania?
10) rozpoznać schemat ideowy?
11) rozpoznać schemat funkcjonalny?
12) rozpoznać schemat podłączenia do SPS?
13) rozpoznać schemat drabinkowy?
14) sprawdzić poprawność połączeń posługując się schematem podłączenia
do SPS?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
4.4. Zabezpieczenia
instalacji
elektrycznych
i
układów
elektronicznych stosowane przy sterownikach
4.4.1. Materiał nauczania
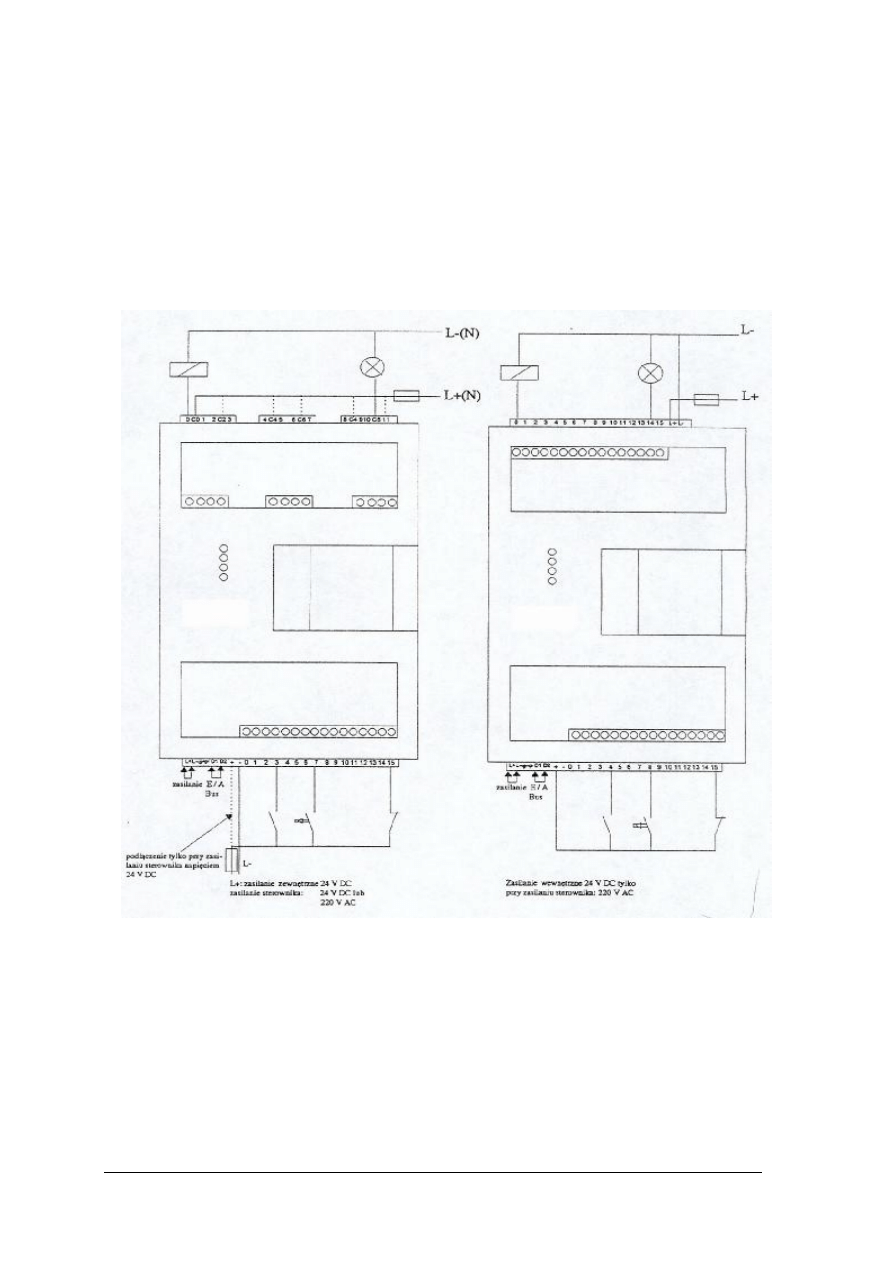
Sposoby zasilania sterownika pokazano na rys. 17. W celu ochrony urządzeń
peryferyjnych wymagane jest podłączenie przewodu uziemiającego. Sterownik zasilany
napięciem 230 V AC posiada wewnętrzny zasilacz wejść 24 V DC, odporny na zwarcia,
dlatego nie zachodzi potrzeba montażu dodatkowych zabezpieczeń.
Rys. 17.
Zasilanie sterownika [opracowanie własne]
W przypadku zewnętrznego zasilania wejść napięciem 24 V DC należy źródło to
zabezpieczyć. Do najprostszych zabezpieczeń należą bezpieczniki topikowe o odpowiednio
dobranym prądzie znamionowym. Znacznie lepiej jest, gdy oprócz bezpiecznika topikowego
układ zabezpieczony jest przed nadmiernym prądem pobieranym ze źródła zasilania
elektronicznym układem zabezpieczenia nadprądowego. Działa ono w taki sposób, że po
przekroczeniu wartości prądu znamionowego obniżane jest napięcie na wyjściu zasilacza.
Kiedy przeciążenie minie napięcie na wyjściu zasilacza powraca automatycznie. Bezpiecznik
topikowy ma wówczas zadanie awaryjne (w przypadku uszkodzenia zabezpieczenia
nadprądowego) i nie należy z niego rezygnować.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
Dodatkowo stosuje się jeszcze zabezpieczenia nadnapięciowe (przed pojawieniem się
zbyt wysokiego napięcia na wyjściu zasilacza. Zadziałanie zabezpieczenia nadnapięciowego
powoduje zwarcie wyjścia zasilacza i uruchomienie zabezpieczenia nadprądowego
a w przypadku jego braku lub uszkodzenia przepalenie wkładki topikowej bezpiecznika.
Napięcie wyjściowe spada wówczas do zera i pozostaje na tym poziomie tak długo,
aż wyłączymy zasilanie i odczekamy od kilku do kilkudziesięciu sekund. Po ponownym
załączeniu zasilania napięcie wyjściowe powraca do wartości znamionowej o ile ponownie
nie pojawi się na wyjściu zbyt duże napięcie. Jeżeli po powtórnym włączeniu zasilania
zadziała zabezpieczenie nadnapięciowe może to oznaczać uszkodzenie stabilizatora zasilacza.
Automatyczne funkcje testujące realizowane przez PLC po podłączeniu do sieci
Po załączeniu napięcia zasilającego sterownik realizuje następujące funkcje testujące:
−
autotest (wewnętrzne funkcje zabezpieczające),
−
zerowanie wszystkich wyjść,
−
zerowanie nieremamentnych (niepamiętających stanu z przed wyłączenia zasilania)
merkerów słownych (specjalnych obszarów pamięci wykorzystywanych w programie)
−
zerowanie nieremamentnych liczników i przekaźników czasowych,
−
uwzględnienie założonych przez użytkownika warunków pracy (np. czy program
zapisany jest w pamięci EEPROM lub RAM, czy program ma startować automatycznie
po załączeniu zasilania czy po sygnale podanym z komputera),
−
kontrola napięcia baterii buforowej.
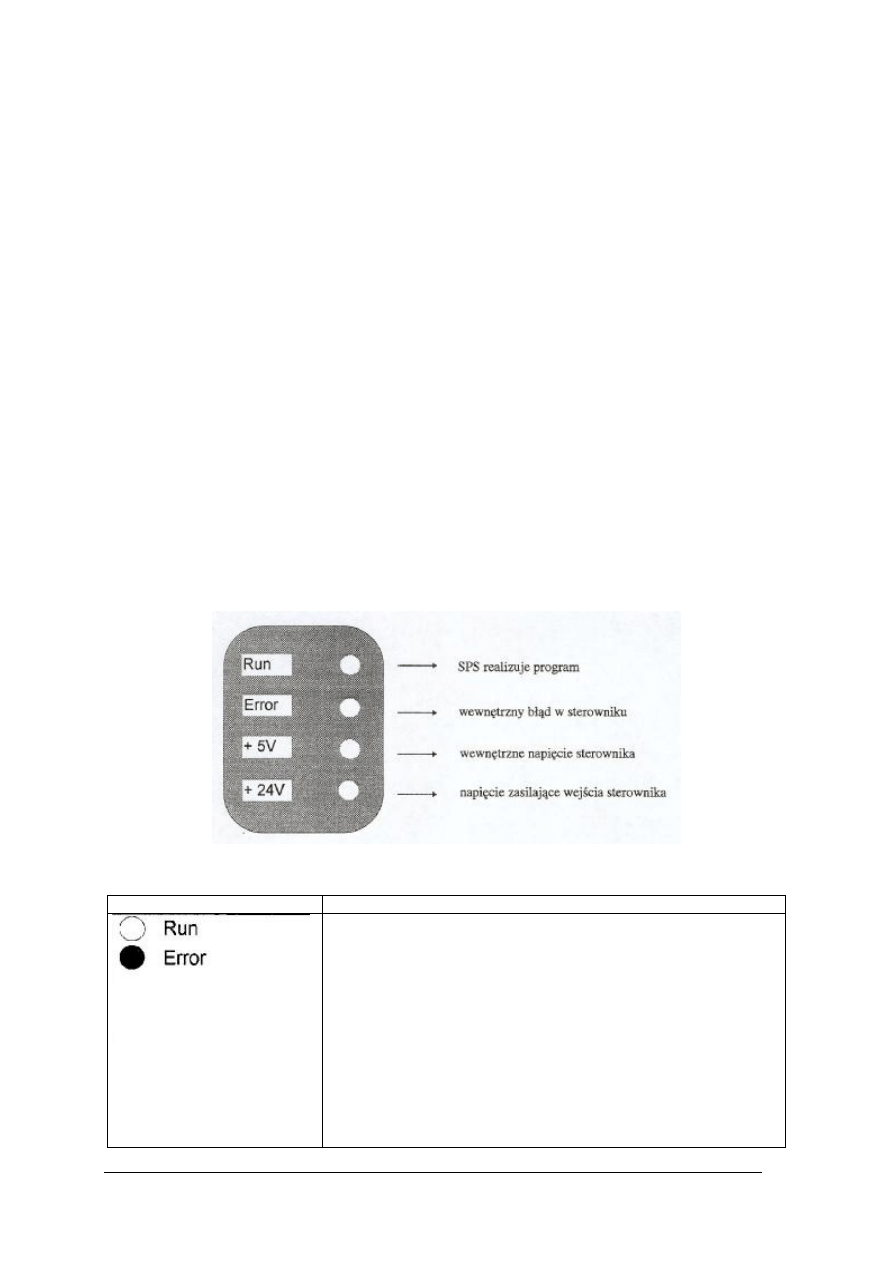
Wynik testu sygnalizowany jest przez sterownik przy pomocy wskaźnika trybu pracy
(rys. 18.) na frontowej ścianie sterownika. Załączenie programu możliwe jest po pozytywnym
wyniku testu. Przykłady sygnalizowanych błędów przedstawia tabela 3.
Rys. 18.
Przykładowy wskaźnik trybu pracy sterownika [opracowanie własne]
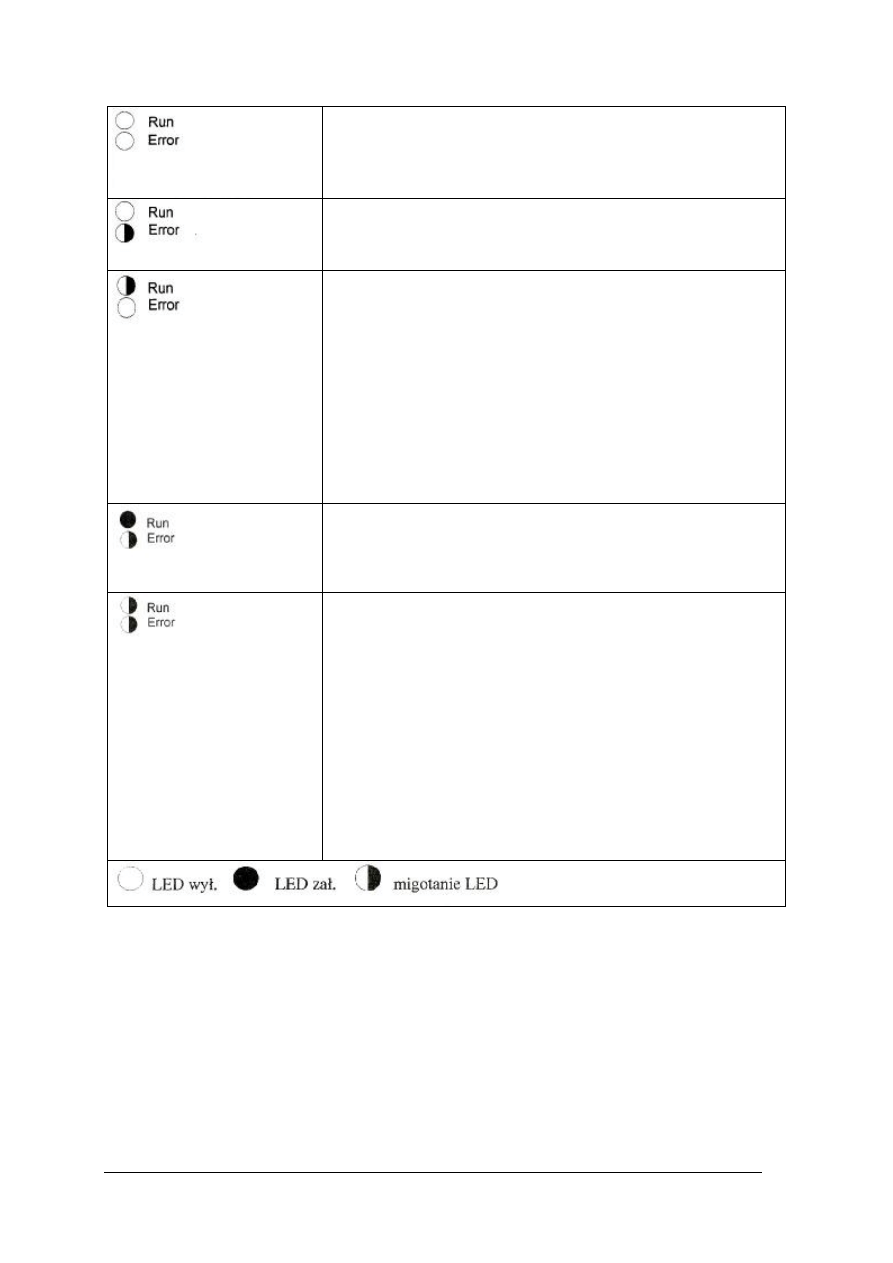
Tabela 3 Przykładowe sygnalizacje błędów [opracowanie własne]
Meldunki trybu pracy
Błędy
Przyczyny:
−
wewnętrzny błąd w sterowniku,
−
niewłaściwie napisany program.
Postępowanie:
−
sprawdzić połączenie magistralne WE/WY,
−
sprawdzić
prawidłowość
ustawienia
przełącznika
adresów
w pierwszym i ostatnim sterowniku,
−
sprawdzić
napięcie
zasilające
sterownika
podstawowego
i sterowników rozszerzających,
−
sprawdzić tryb pracy sterownika za pośrednictwem komputera za
pomocą odpowiednich funkcji sterujących pracą sterownika,
−
sprawdzić program, adresy operandów i jego strukturę, czas cyklu,
−
zdefiniować pamięć w której zapisany jest program.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
Przyczyny:
−
program nie został załączony.
Postępowanie:
−
sprawdzić automatyczny start programu. Parametr AS = 1 (ustawiany
w oprogramowania systemowym sterownika).
Przyczyny:
−
błąd w zasilaniu bateryjnym.
Postępowanie:
−
wymienić baterię w ciągu 30 dni.
Przyczyny:
−
sterownik podstawowy oczekuje na sygnał zwrotny ze sprzętu
rozszerzającego.
Postępowanie:
−
sprawdzenie sterowników rozszerzających, w których brak jest
meldunku „RUN” i jednocześnie świeci się dioda „ERROR”,
−
sprawdzić napięcie zasilania sterowników,
−
sprawdzić połączenia magistralne WE/WY,
−
sprawdzić
prawidłowość
ustawienia
przełącznika
adresów
w pierwszym i ostatnim sterowniku,
−
sprawdzić tryb pracy sterownika za pośrednictwem komputera za
pomocą odpowiednich funkcji sterujących pracą sterownika,
−
sprawdzić program, adresy operandów i jego strukturę.
Przyczyny:
−
błąd w zasilaniu bateryjnym (sterownik podstawowy pracuje
z EEPROM i załączoną remanencją).
Postępowanie:
−
wymienić baterię w ciągu 30 dni.
Przyczyny:
−
błąd w zasilaniu bateryjnym (sterownik podstawowy pracuje
z EEPROM i załączoną remanencją), sterownik w stanie oczekiwania
na sygnał zwrotny ze sprzętu rozszerzającego.
Postępowanie:
−
wymienić baterię w ciągu 30 dni,
−
sprawdzenie sterowników rozszerzających, w których brak jest
meldunku „RUN” i jednocześnie świeci się dioda „ERROR”,
−
sprawdzić napięcie zasilania sterowników,
−
sprawdzić połączenia magistralne WE/WY,
−
sprawdzić
prawidłowość
ustawienia
przełącznika
adresów
w pierwszym i ostatnim sterowniku,
−
sprawdzić tryb pracy sterownika za pośrednictwem komputera za
pomocą odpowiednich funkcji sterujących pracą sterownika,
−
sprawdzić program.
Inne źródła błędów:
−
temperatura otoczenia większa od 55ºC,
−
temperatura otoczenia mniejsza od 0ºC,
−
wysoka wilgotność otoczenia,
−
inne wpływy zewnętrzne (wstrząsy, zanieczyszczenie powietrza),
−
nieodpowiednie połączenia,
−
nieekranowane przewody przesyłu danych, przewody dla sygnałów analogowych,
−
niepoprawnie podłączony ekran (wymagane jest podłączenie jednostronne),
−
przekroczona maksymalna długość przewodów analogowych lub przewodów przesyłu
danych,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
−
bark elementów przeciwzakłóceniowych (filtry sieciowe, elementy RC).
Przepisy instalacyjne
1. Sygnały nadawane za pośrednictwem mechanicznych członów łączeniowych (wyłącznik
krańcowy). Pewność łączenia poprzez styki sterownicze zmniejsza się przy niskim
napięciu sterowania. Odbiór sygnału przez PLC lub inne urządzenie elektroniczne
związany jest także z problemem małych natężeń prądu. W najbardziej niekorzystnym
przypadku występuje tzw. suche łączenie, co powoduje, że PLC nie rozpoznaje stanu
wysokiego na wejściu (stan wysoki to napięcie 24VDC a stan niski to napięcie 0VDC).
W celu ograniczenia możliwych błędów łączeniowych zalecane jest stosowanie przy
mechanicznych członach łączeniowych podwójnych, ewentualnie pozłacanych zestyków.
Uwaga powyższa dotyczy szczególnie przypadków, w których nie można wykluczyć
zabrudzenia styków.
2. Sygnały nadawane przez styki pomocnicze styczników.
W celu zwiększenia pewności łączenia zalecane jest stosowanie styczników
z podwójnymi stykami lub o zwiększonej pewności styku.
3. Prowadzenie przewodów sygnałowych.
W normalnych warunkach nie zachodzi potrzeba osobnego prowadzenia przewodów
sygnałowych i wysokoprądowych. Krótkie skoki napięcia nie powodują zakłóceń.
W przypadku planowanych załączeń silników, elektrozaworów czy innych odbiorników
indukcyjnych zalecana jest osobna instalacja przewodów sygnałowych.
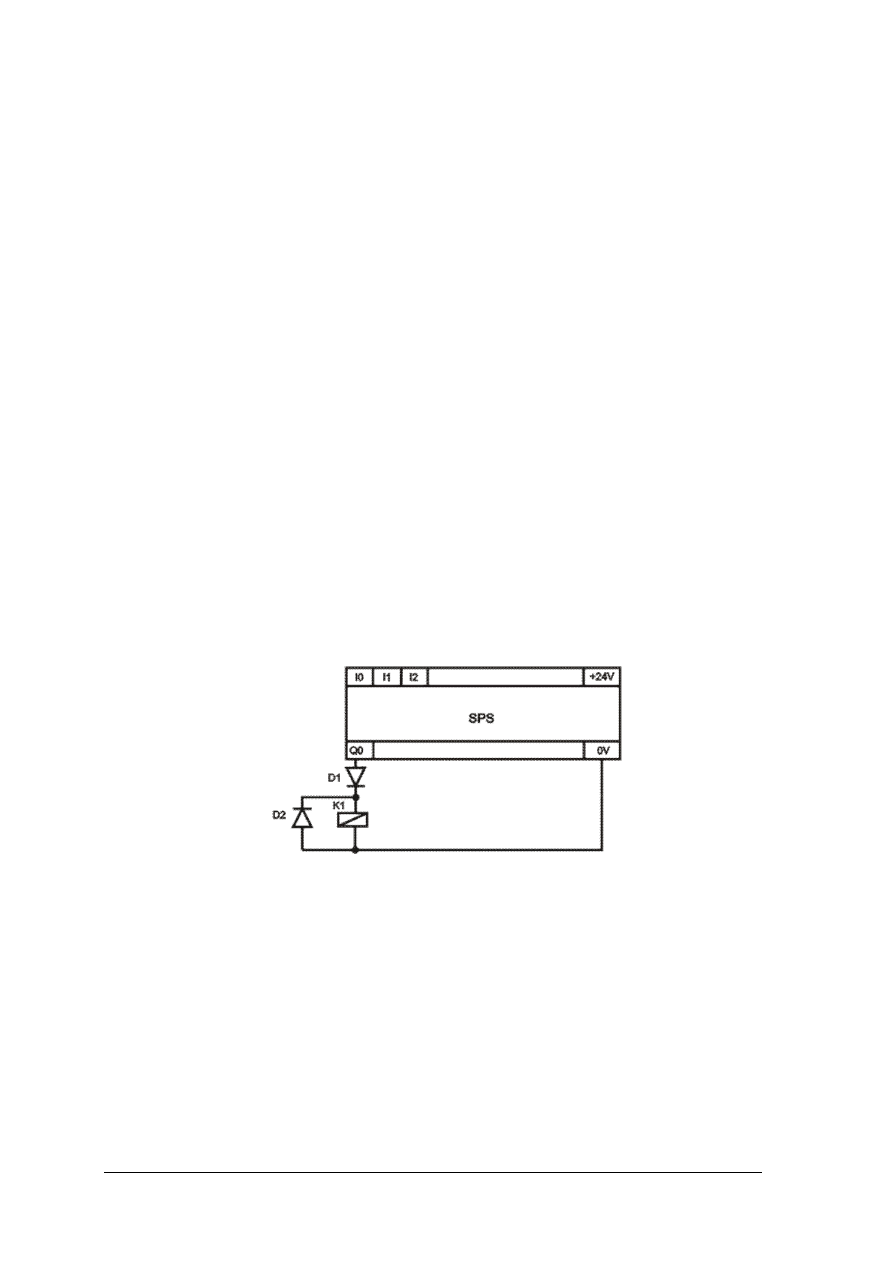
4. Dla zabezpieczenia wyjść sterownika przed przepięciami pochodzącymi od cewki
przekaźnika lub stycznika stosuje się diodę prostowniczą D2 (rys. 19.) bocznikującą
(połączoną równolegle) cewkę stycznika (przekaźnika) spolaryzowaną zaporowo
(+ na katodę a – na anodę diody). Jednocześnie szeregowo z cewką stycznika
(przekaźnika) łączy się diodę prostowniczą D1 spolaryzowaną w kierunku przewodzenia.
Tego typu układy diodowe produkowane są w postaci gotowych modułów. Moduły te
łączy się z podstawką stycznika (przekaźnika).
Rys. 19.
Zabezpieczenie
wyjścia
sterownika
przed
przepięciem
od
cewki
przekaźnika [opracowanie własne]
5. Sygnały analogowe: mksymalna długość przewodów doprowadzających sygnał
analogowy nie powinna przekraczać 10 m.
6. Zasilanie.
Przed załączeniem napięcia musi być podłączony przewód uziemiający, w przeciwnym
wypadku może dojść do uszkodzeń urządzeń peryferyjnych a nawet sterownika.
Zasilanie napięciem 24 V DC: złącza standardowe dla sygnałów analogowych,
programowe, komunikacyjne RS 232, magistrale RS 485 nie są galwanicznie
odizolowane. Dlatego też wszystkie urządzenia podłączone do tych złączy powinny mieć
to samo napięcie odniesienia.
7. Podłączenie i odłączenie komputerów od złączy sterowników.
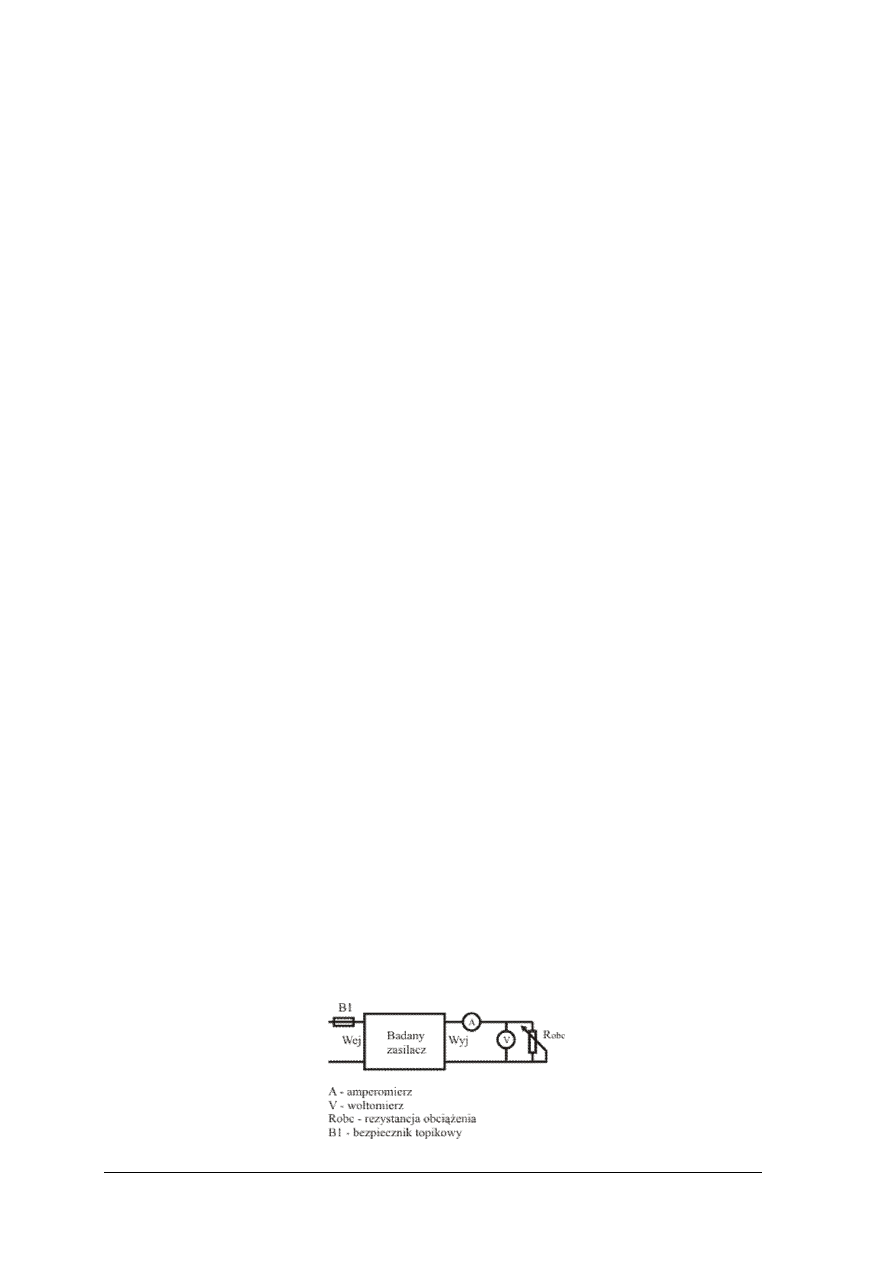
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
Pamięć EEPROM może być podłączona lub odłączona tylko po wyłączeniu sterownika
z sieci! Ta sama zasada obowiązuje przy podłączaniu urządzeń peryferyjnych do
sterownika o zasilaniu stałym 24V.
Przyrządy niezbędne do poszukiwania usterek: woltomierz DC o odpowiednim zakresie
pomiarowym np. 24 V i omomierz.
Obwody wejść cyfrowych (dwustanowych)
Prostym sposobem sprawdzenia prawidłowego doprowadzenia sygnału cyfrowego
z przełącznika dwustanowego jest pomiar napięcia na interesującym nas wejściu względem
masy zasilania (24 V DC). Jeżeli sygnał jest prawidłowo doprowadzony, to podczas zmiany
stanu przełącznika obserwujemy na woltomierzu pojawianie się i zanik napięcia 24V. Jeżeli
zmiany napięcia na woltomierzu nie występują, usterka może być spowodowana
uszkodzeniem przełącznika lub przerwą w przewodzie łączącym. Należy wówczas sprawdzić
czy do przełącznika doprowadzone jest napięcie, jeśli nie to przyczyną awarii może być
przerwany lub odłączony przewód lub bark napięcia na wyjściu zasilacza. Przerwę
w przewodzie zasilającym oraz sprawność przełącznika dwustanowego najłatwiej sprawdzić
omomierzem. Jednakże takich pomiarów należy dokonywać najlepiej przy odłączonym
napięciu zasilającym. Napięcie 24V nie jest niebezpieczne dla osoby dokonującej pomiary,
ale podane na wejście omomierza może spowodować jego trwałe uszkodzenie. Po znalezieniu
uszkodzonej części obwodu należy wymienić ją na pełnosprawną.
4.4.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie zabezpieczenia stosuje się w układach zasilania sterowników?
2. Dlaczego nie rezygnuje się z bezpiecznika topikowego zabezpieczającego sterownik
przed przeciążeniem prądowym?
3. Jakie funkcje testujące realizowane są przez sterownik PLC po podłączeniu do sieci?
4. Co może być źródłem błędów sterownika?
5. Na czym polega „suche łączenie”?
6. Jak zapobiegać suchemu łączeniu?
7. W jaki sposób zabezpiecza się wyjścia sterownika przed przepięciami pochodzącymi
od cewek styczników?
8. Na jaką maksymalną odległość przesyła się sygnały analogowe?
9. Kiedy można dołączyć (odłączyć) komputer do (od) sterownika?
10. Jakie narzędzia mogą być pomoce w poszukiwaniu usterek?
4.4.3. Ćwiczenia
Ćwiczenie 1
Skontroluj poprawność działania zabezpieczenia nadprądowego. Przykładowy układ
połączeń do sprawdzenia zabezpieczenia nadprądowego zasilacza zasilającego sterownik
wraz z układem sterowniczym.
Rys. do ćwiczenia 1
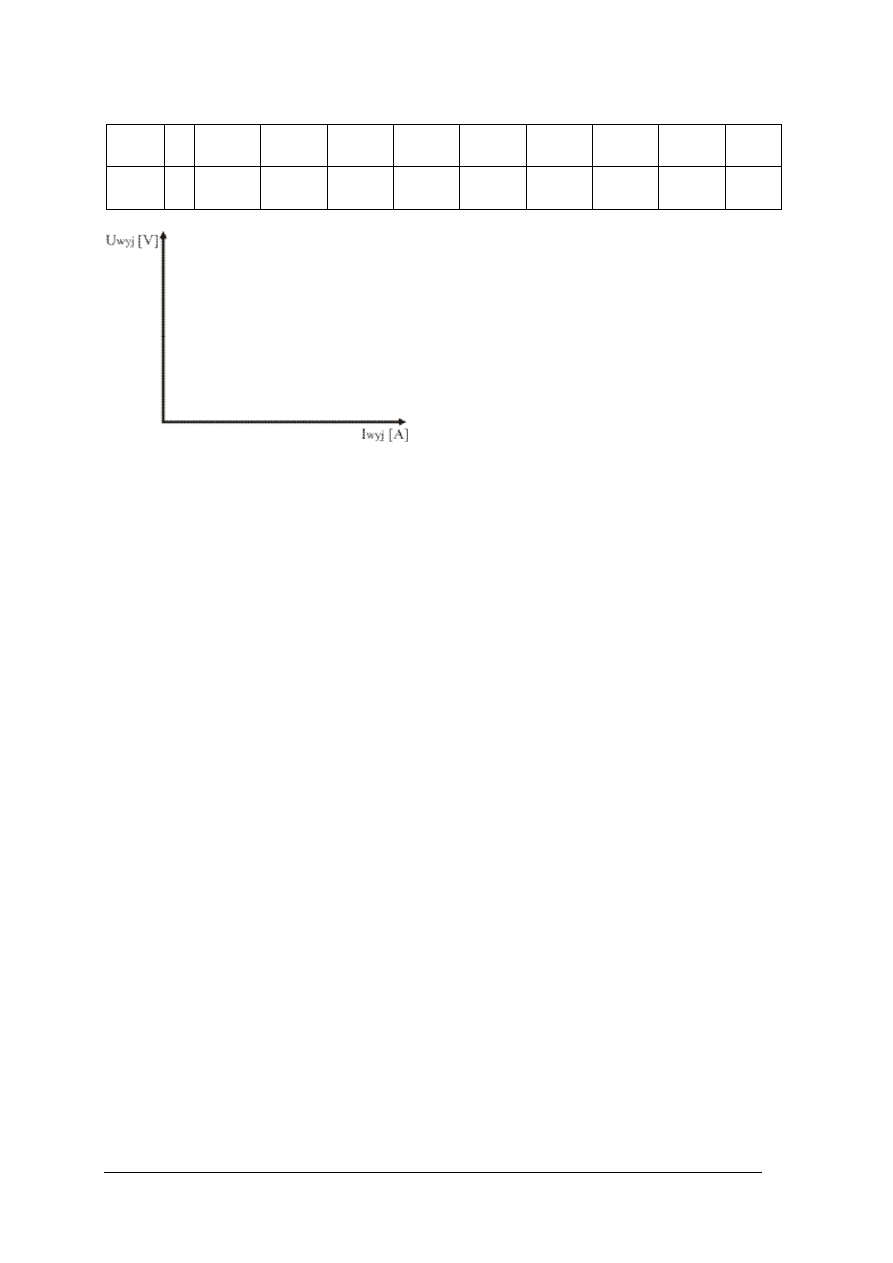
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
Tabela pomiarów do ćwiczenia 1.
U wyj V
I wyj
A
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) połączyć układ zgodnie ze schematem,
2) ustawić oporność opornicy suwakowej na maksimum,
3) podłączyć zasilanie,
4) mierząc natężenie prądu oraz napięcie zmniejszać oporność obciążenia opornicy
suwakowej – wyniki zapisać w tabelce pomiarowej,
5) zmniejszać oporność obciążenia do czasu gwałtownego spadku napięcia – cały czas
zapisywać wyniki pomiarów w tabelce,
6) teraz zwiększać oporność obciążenia i nadal zapisywać wyniki pomiarów,
7) sporządzić wykres zależności napięcia wyjściowego od zmian natężenia prądu
obciążenia,
8) wyciągnąć wnioski z otrzymanych pomiarów i sporządzonego wykresu.
Wyposażenie stanowiska pracy:
−
badany zasilacz (z zabezpieczeniem nadprądowym),
−
amperomierz prądu stałego (miernik uniwersalny) o zakresie dostosowanym do prądu
zabezpieczenia nadprądowego badanego zasilacza,
−
woltomierz napięcia stałego (miernik uniwersalny) o zakresie dostosowanym do napięcia
wyjściowego znamionowego badanego zasilacza,
−
opornica suwakowa o rezystancji i obciążalności dostosowanej do prądu zabezpieczenia
nadprądowego badanego zasilacza,
−
przewody łączące,
−
arkusze papieru formatu A4, flamastry,
−
papier milimetrowy do sporządzenia wykresu.
Ćwiczenie 2
Dokonaj sprawdzenia działania zabezpieczenia zwarciowego. Przykładowy układ
połączeń do sprawdzenia zabezpieczenia zwarciowego zasilacza zasilającego sterownik wraz
z układem sterowniczym.
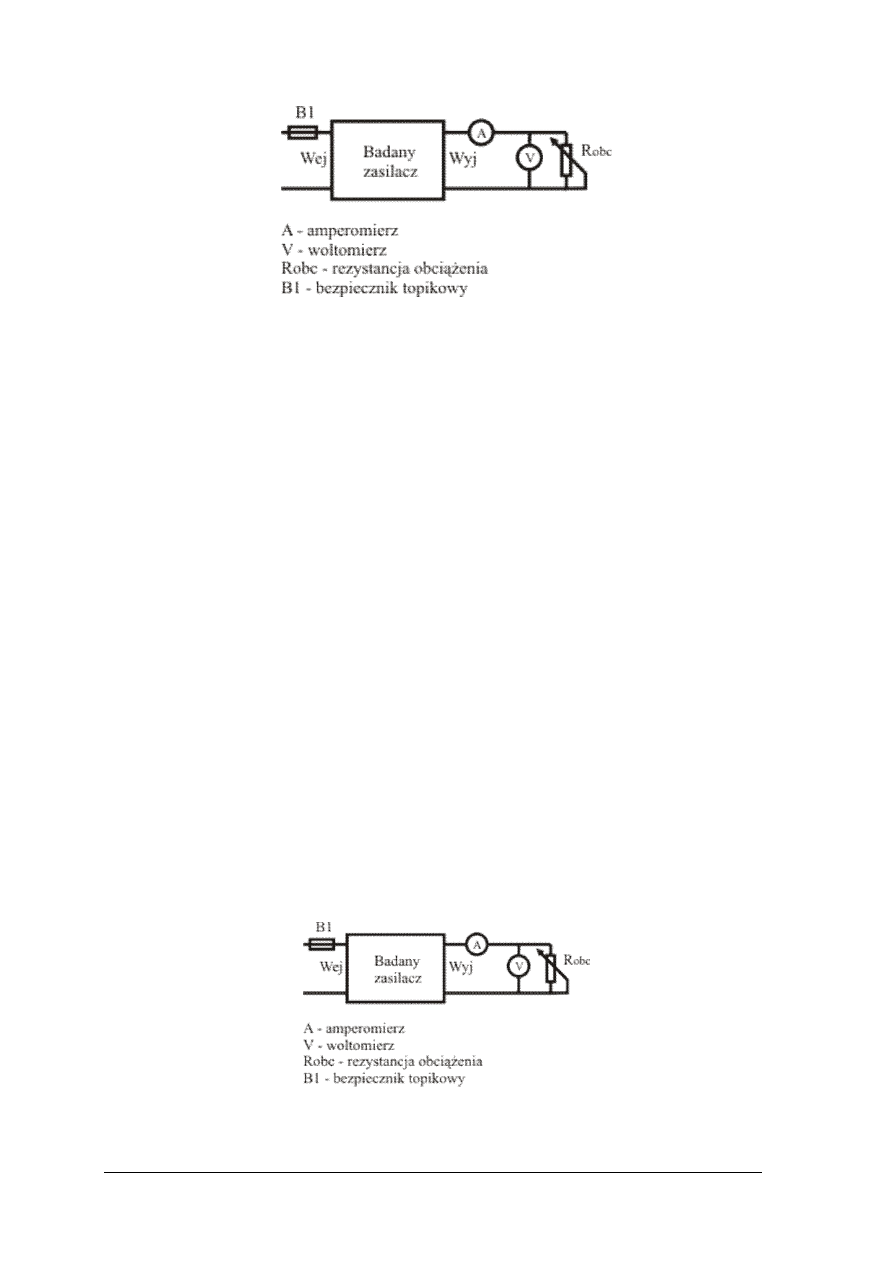
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
Rys. do ćwiczenia 2
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) połączyć układ zgodnie ze schematem,
2) ustawić oporność opornicy suwakowej na maksimum,
3) podłączyć zasilanie,
4) zmniejszyć oporność obciążenia do zera (zwarcie),
5) zapisać wartość prądu zwarciowego i napięcia wyjściowego podczas zwarcia,
6) odczekać kilka sekund,
7) zwiększyć rezystancję obciążenia do wartości przy której płynie prąd znamionowy,
8) odczytać i zapisać wartość napięcia wyjściowego i prądu obciążenia,
9) wyciągnąć wnioski.
Wyposażenie stanowiska pracy:
−
badany zasilacz (z zabezpieczeniem nadprądowym),
−
amperomierz prądu stałego (miernik uniwersalny) o zakresie dostosowanym do prądu
zabezpieczenia zwarciowego badanego zasilacza,
−
woltomierz napięcia stałego (miernik uniwersalny) o zakresie dostosowanym do napięcia
wyjściowego znamionowego badanego zasilacza,
−
opornica suwakowa o rezystancji i obciążalności dostosowanej do prądu zabezpieczenia
zwarciowego badanego zasilacza,
−
przewody łączące,
−
arkusze papieru formatu A4, flamastry.
Ćwiczenie 3
Skontroluj działanie bezpiecznika w układzie zabezpieczenia przeciążeniowego zasilania.
Przykładowy układ połączeń do kontroli działania bezpiecznika w układzie przeciążeniowego
zasilania.
Rys. do ćwiczenia 3
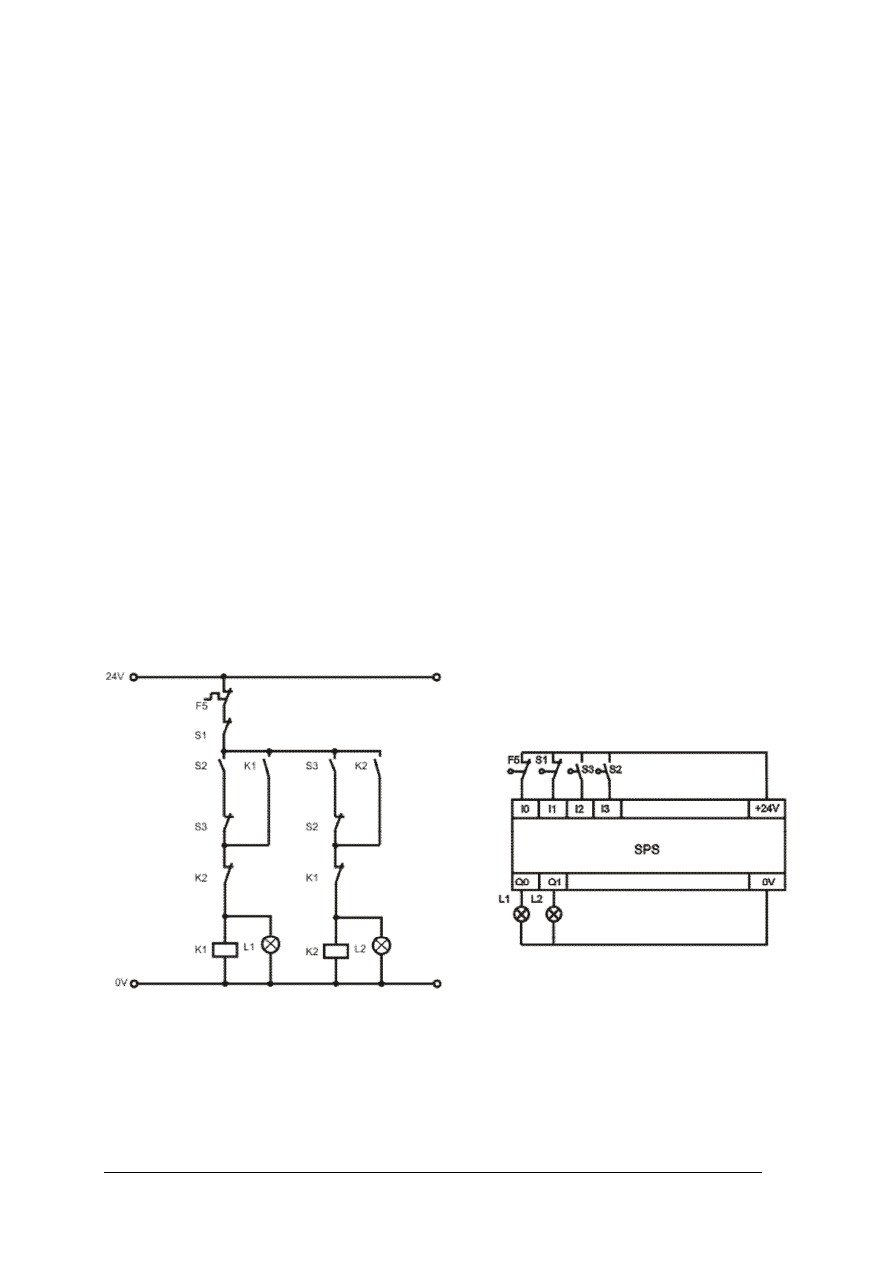
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) połączyć układ zgodnie ze schematem,
2) ustawić oporność opornicy suwakowej na maksimum,
3) podłączyć zasilanie,
4) zmniejszyć
oporność
obciążenia
do
wartości
powodującej
przepływ
prądu
znamionowego,
5) wyłączyć zasilanie,
6) wyjąć bezpiecznik topikowy (wyłączyć bezpiecznik elektromagnetyczny),
7) włączyć zasilanie,
8) sprawdzić czy amperomierz wykazuje przepływ prądu.
Wyposażenie stanowiska pracy:
−
badany zasilacz z bezpiecznikiem topikowym lub elektromagnetycznym,
−
amperomierz prądu stałego (miernik uniwersalny) o zakresie dostosowanym do prądu
znamionowego badanego zasilacza,
−
woltomierz napięcia stałego (miernik uniwersalny) o zakresie dostosowanym do napięcia
wyjściowego znamionowego badanego zasilacza,
−
opornica suwakowa o rezystancji i obciążalności dostosowanej do prądu znamionowego
badanego zasilacza,
−
przewody łączące,
−
arkusze papieru formatu A4, flamastry.
Ćwiczenie 4
Zlokalizuj usterki (przerwy lub zwarcia) w obwodzie zewnętrznym sterownika.
Przykładowy układ połączeń do poszukiwania usterki w obwodzie zewnętrznym sterownika.
Rys. do ćwiczenia 4
Przykładowy program (do rys. do ćwiczenia 4):
LD
% I0.3
ANDN
% I0.2
OR
% Q0.0
ANDN
% Q0.1
AND
% I0.1

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
AND
% I0.0
ST
% Q0.0
LD
% I0.2
ANDN
% I0.3
OR
% Q0.1
ANDN
% Q0.0
AND
% I0.1
AND
% I0.0
ST
% Q0.1
END
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) rozpoznać elementy na schemacie oraz zidentyfikować adresy wejść i wyjść
w sterowniku,
2) zidentyfikować odpowiednie łączniki połączone ze sterownikiem zgodnie ze schematem,
3) połączyć sterownik z komputerem przy pomocy specjalnego przewodu komunikacyjnego
(interfejsu),
4) włączyć komputer i sterownik do zasilania,
5) uruchomić oprogramowanie sterownika,
6) przepisać program w edytorze, zapisać go na dysku i przesłać do pamięci sterownika,
7) uruchomić sterownik,
8) przetestować pracę układu sterowniczego,
9) poszukiwać usterki w obwodzie przy pomocy woltomierza (omomierza – tylko przy
wyłączonym zasilaniu),
10) usunąć usterkę
11) przetestować pracę układu sterowniczego,
12) jeżeli układ nie działa poprawnie dalej poszukiwać i usuwać usterki oraz testować pracę
układu sterowniczego,
13) spostrzeżenia zapisać w zeszycie i wyciągnąć wnioski,
14) wyłączyć sterownik i komputer,
15) odłączyć interfejs.
Wyposażenie stanowiska pracy:
−
komputer z oprogramowaniem do sterownika PLC,
−
stanowisko montażowe ze sterownikiem PLC,
−
DTR sterownika PLC,
−
interfejs do połączenia sterownika z komputerem,
−
łączniki zwierne i rozwierne,
−
lampki kontrolne, przewody łączeniowe,
−
miernik uniwersalny wraz z przewodami pomiarowymi,
−
narzędzia monterskie.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
47
4.4.4. Sprawdzian postępów
Czy potrafisz
Tak
Nie
1) wyjaśnić pojęcie zabezpieczenie nadprądowe?
2) 2wyjaśnić pojęcie zabezpieczenie nadnapięciowe?
3) wyjaśnić pojęcie przewód ochronny?
4) wyjaśnić pojęcie dioda spolaryzowana zaporowo?
5) wyjaśnić pojęcie doda spolaryzowana w kierunku przewodzenia?
6) wskazać zaciski zasilające?
7) podłączyć zasilanie do sterownika zgodnie z dokumentacją?
8) odszukać usterki w obwodzie sterowniczym?
9) połączyć sterownik z komputerem w celu wpisania programu?
10) podłączyć stycznik do wyjścia sterownika stosując diody zabezpieczające?
11) włączyć do obwodu woltomierz i amperomierz?
12) zmierzyć natężenie prądu i napięcie?
13) posłużyć się omomierzem i miernikiem uniwersalnym?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
48
4.5. Komputerowe
wspomaganie
projektowania
systemów
z zastosowaniem sterowników
4.5.1. Materiał nauczania
Sterowniki swobodnie programowalne SPS lub inaczej PLC (dalej zwane PLC)
to sterowniki z programowaną pamięcią, gdzie zmiana programu może być przeprowadzona
wielokrotnie (raz zaprogramowany sterownik może być przeprogramowany). Sterowniki PLC
należą do mniejszych jednostek stosowanych w technice sterowników z programowaną
pamięcią i znalazły zastosowanie w sterowaniu takich urządzeń jak:
−
piły i urządzenia sortujące w zakładach przeróbki drewna,
−
sygnalizacja świetlna, szlabany na przejazdach kolejowych,
−
bramy garażowe,
−
przenośniki taśmowe (transport, sortowanie, składowanie, zliczanie),
−
urządzenia sterylizujące i fermentacyjne w przemyśle mleczarskim,
−
windy i wyciągi,
−
prasy,
−
silosy, szklarnie, wagi w rolnictwie,
−
oczyszczalnie wody,
−
myjnie samochodowe,
−
urządzenia grzewcze, klimatyzacyjne, oświetleniowe stosowane w budownictwie.
Zadania sterownicze były tradycyjnie rozwiązywane przy pomocy styczników,
przekaźników oraz odpowiedniej kombinacji połączeń między nimi. Sterownik pozwala
na zastąpienie tych połączeń programem.
Cechy tradycyjnego sterowania stycznikowego
1. Zadanie sterownicze.
Układ sterowniczy realizowany jest po określeniu jego zadań przy pomocy styczników
i przekaźników. Działanie układu przedstawia schemat elektryczny, według którego
budowana jest później szafa sterownicza. Kolejne styczniki i różnego rodzaju przekaźniki
łączone są ze sobą przy pomocy przewodów. Logikę układu określa kombinacja
elementów łączeniowych i sposób ich połączeń w układzie. By sprawdzić układ
sterowniczy należy przebadać prawidłowość wykonania połączeń.
2. Błąd w układzie.
Usunięcie błędu w układzie polega na dokonaniu zmian w połączeniach.
3. Nowy układ sterowniczy realizujący identyczne zadanie sterownicze. Realizacja układu
sterowniczego pełniącego te same zadania sterownicze wymaga ponownej budowy szafy
sterowniczej, zabudowania elementów łączeniowych, wykonania połączeń i ich
sprawdzenia.
4. Dodatkowe zadania sterownicze. Przyszłe ewentualne zmiany zadań, które ma realizować
układ sterowniczy oznaczają często potrzebę nowych prac montażowych, tzn. zabudowy
nowych elementów konstrukcyjnych i wykonania odpowiednich połączeń. Proces ten jest
bardzo czaso– i materiałochłonny.
Cechy urządzenia sterowanego przy pomocy PLC
1. Zadanie sterownicze. Do realizacji układu sterowania przy pomocy PLC potrzebny jest
sterownik z programowalną pamięcią.
Sterownik składa się z następujących podstawowych części:
a) bloku zasilania,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
49
b) cyfrowych urządzeń wejścia i wyjścia, do których podłączane są źródła sygnałów
wejściowych i organy wykonawcze,
c) pamięci RAM, w której zapisywany jest program,
d) mikroprocesora realizującego program.
Prace instalacyjne polegają na podłączeniu źródeł sygnałów wejściowych (łączniki,
przyciski sterownicze, czujniki temperatury, tachometry, wyłączniki krańcowe itp.)
na wejściu sterownika i urządzeń wykonawczych (np. styczniki, przekaźniki) na wyjściu
sterownika. Program określa, które ze źródeł sygnałów wejściowych i w jakim momencie
załącza kolejne organy wykonawcze.
W programie zawarte są wszystkie zależności logiczne, które ma realizować układ
sterowniczy. Program po napisaniu przy pomocy programatora lub komputera przesyłany
jest do sterownika. Mikroprocesor sterownika realizuje krok po kroku kolejne rozkazy
zapisane w programie. Działanie układu sterowniczego określone jest nie przez
kombinację połączeń, lecz przez program.
2. Błąd w układzie sterowniczym. Przed załączeniem układu sterowniczego istnieje
możliwość sprawdzenia prawidłowości działania programu. Potrzebny jest do tego
sterownik, komputer i symulator cyfrowy podający sygnały wejściowe. W przypadku
błędu należy zmienić w programie odpowiednie polecenie.
3. Nowy układ sterowniczy realizujący identyczne zadanie sterownicze. Raz napisany
program można wielokrotnie wykorzystywać, przez co skrócony zostaje czas realizacji
nowego układu sterowniczego i zmniejszeniu ulegają koszty instalacji.
4. Zmiana zadań sterowniczych. W wypadku potrzeby zmiany lub poszerzenia funkcji
układu sterowniczego, z jednoczesnym wykorzystaniem tych samych źródeł sygnałów
wejściowych i elementów wykonawczych należy odpowiednio zmodyfikować program.
Zmiany w programie przeprowadza się w sposób szybki i bezproblemowy.
Oprogramowanie
Wymagania sprzętowe oprogramowania PLC:
−
komputer osobisty,
−
twardy dysk z odpowiednią ilością wolnego miejsca (zależnie od oprogramowania),
−
stacja dysków odpowiednia do źródła oprogramowania instalacyjnego,
−
system
operacyjny
MS
Windows
(zależnie
od
wymagań
oprogramowania
instalacyjnego),
−
podstawowy program dla sterownika,
−
standardowy interfejs użytkownika Windows,
−
dowolna karta graficzna,
−
ewentualnie drukarka.
Uwaga: przed instalacją oprogramowania warto jest wykonać kopię zapasową programu.
W ten sposób zabezpieczamy się przed ewentualnym skutkiem uszkodzenia nośnika
z oprogramowaniem instalacyjnym.
Krótki kurs programowania sterownika
LD
rozpoczęcie programu dla łącznika zwiernego,
LDN
rozpoczęcie programu dla łącznika rozwiernego,
ST
przypisanie wyjścia pod warunkiem, że funkcja poprzedzająca przyjmuje
wartość 1 logicznej.
Po załączeniu sterownika i uruchomieniu programu pojawi się 1 logiczna na wyjściu
Q0.1. Po naciśnięciu przycisku zwiernego podłączonego do wejścia I0.0 jedynka pojawi się
również na wyjściu Q0.0 oraz jednocześnie na cewce modułu czasowego TM0. Po czasie
nastawionym w module czasowym zwarcie styku zwiernego modułu czasowego TM0, co
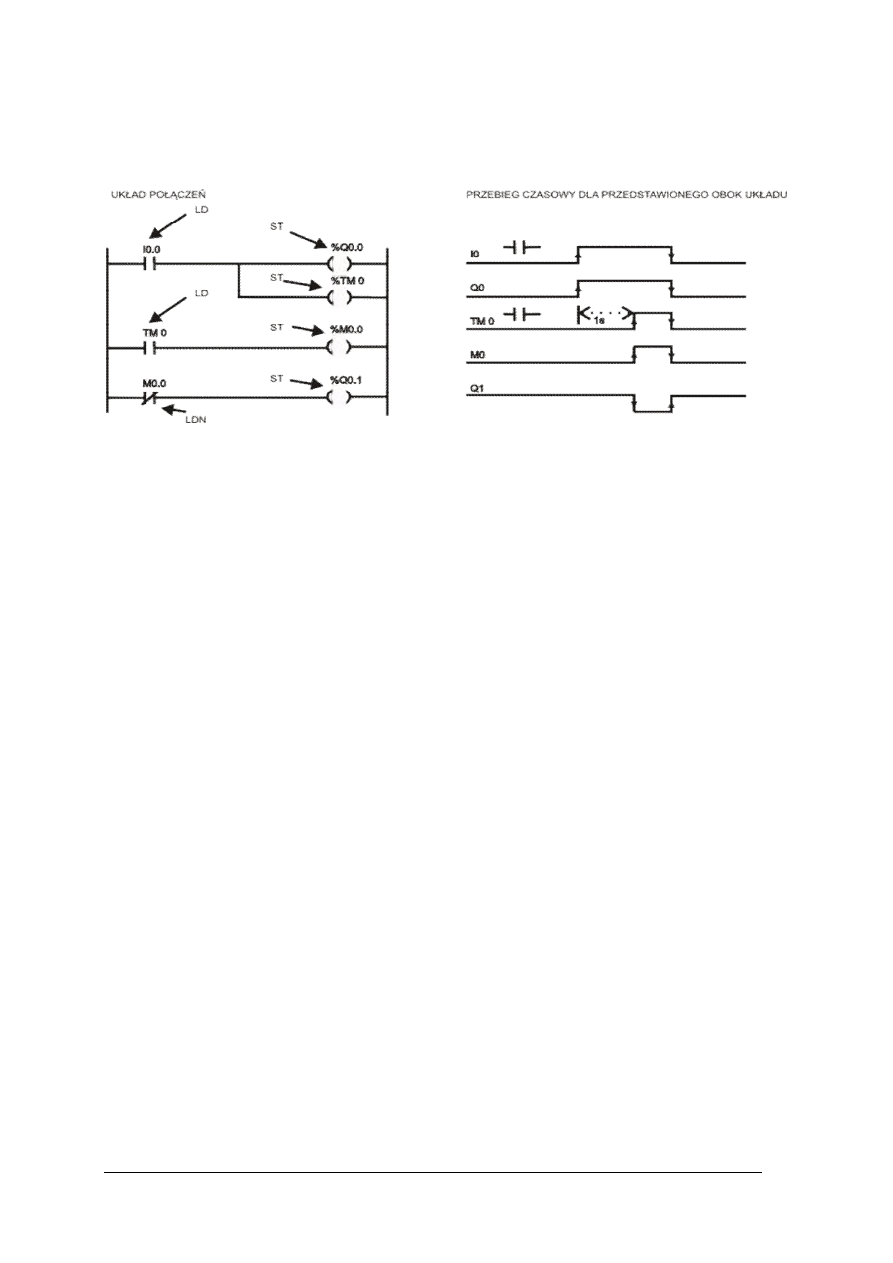
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
50
spowoduje pojawienie się jedynki logicznej na cewce merkera M0.0. Jedynka logiczna
podana na cewkę merkera M0.0 spowoduje rozwarcie styku rozwiernego merkera M0.0 i na
wyjściu Q0.1 pojawi się zero logiczne. Powyższą zasadę działania obrazuje przebieg czasowy
na rysunku 20.
Rys. 20. Stosowanie funkcji LD, LDN i ST [opracowanie własne]
Przykładowy program do układu z rys. 20:
LD
%I0.0
czytaj stan logiczny wejścia I0,
ST
%Q0.0
przypisz powyższy stan (I0) do wyjścia Q0,
IN
%TM0
przypisz powyższy stan (I0) do modułu czasowego T0
LD
%TM0
czytaj stan logiczny modułu T0
ST
%M0.0
przypisz powyższy stan (T0) do merkera M0
LDN
%M0.0
czytaj zanegowany stan merkera M0
ST
%Q0.1
przypisz powyższą negację do wyjścia Q1
END
UWAGA: merker to bitowa komórka pamięci umieszczona w wewnętrznym rejestrze
sterownika. Jest on elementem wirtualnym (istniejącym tylko w programie) i może
zachowywać się tak jak przekaźnik (posiada cewkę i styki zwierne i rozwierne).
AND
–
powiązanie funkcją iloczynu logicznego
ANDN
–
powiązanie funkcją negacji iloczynu logicznego
OR
–
powiązanie funkcją sumy logicznej
ORN
–
powiązanie funkcją negacji sumy logicznej
Zwróć uwagę na obydwa równoważne programy (w języku drabinkowym i języku LIST).
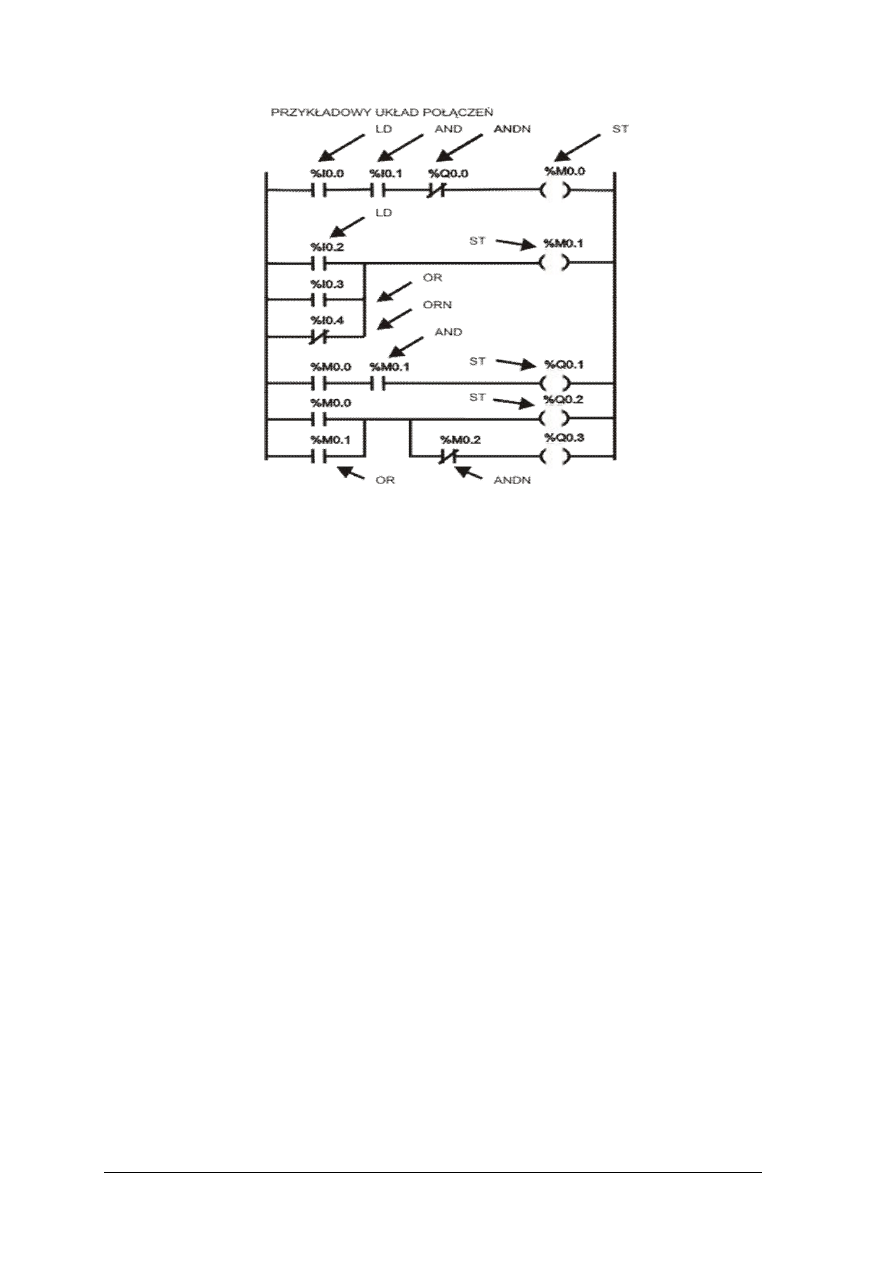
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
51
Rys. 21.
Przykładowy układ połączeń [opracowanie własne]
Przykładowy program do układu z rys. 21:
LD
%I0.0
czytaj stan logiczny wejścia I0
AND
%I0.1
połącz iloczynem logicznym z wejściem I1
ANDN
%Q0.0;
połącz negacją iloczynu logicznego z wyjściem Q0
ST
%M0.0
wynik powyższej funkcji przypisz do merkera M0
LD
%I0.2
czytaj stan logiczny wejścia I2
OR
%I0.3
połącz sumą logiczną z wejściem I3
ORN
%I0.4
połącz negacją sumy logicznej z wejściem I4
ST
%M0.1
wynik powyższej funkcji przypisz do merkera M1
LD
%M0.0
czytaj stan logiczny merkera M0
AND
%M0.1
połącz iloczynem logicznym z merkerem M1
ST
%Q0.1
wynik powyższej funkcji przypisz do wyjścia Q1
LD
%M0.0
czytaj stan logiczny merkera M0
OR
%M0.1
połącz sumą logiczną z merkerem M1
ST
%Q0.2
wynik powyższej funkcji przypisz do wyjścia Q2
ANDN
;%M0.2
połącz powyższą funkcję negacją iloczynu;
;logicznego z merkerem M2
ST
%Q0.3
;wynik powyższej funkcji przypisz do wyjścia Q3
END
Nawiasy są stosowane w skomplikowanych połączeniach w celu uproszczenia
przejrzystości układu.
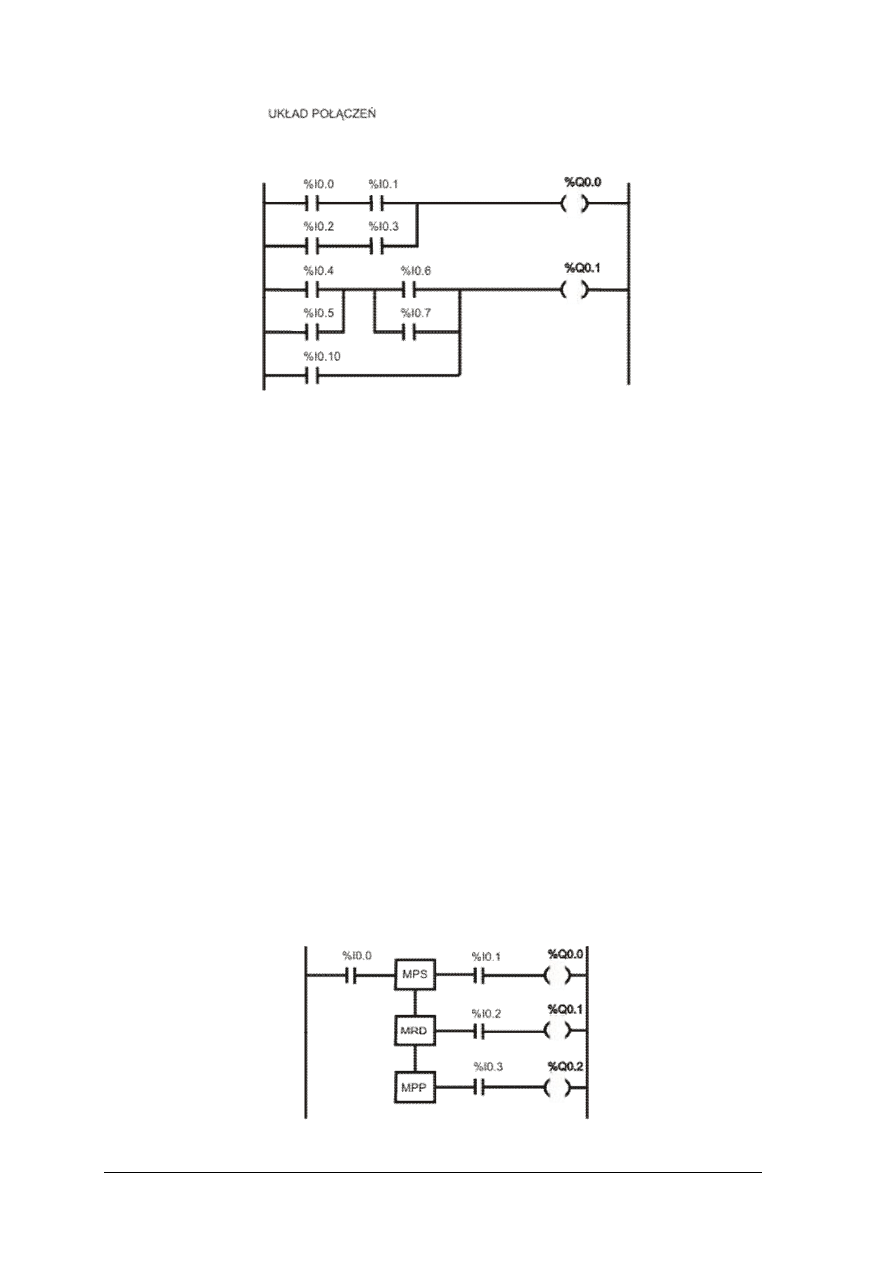
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
52
Rys. 22.
Przykładowe stosowanie nawiasów [opracowanie własne]
Przykładowy program do układu z rys. 22:
LD
%I0.0
czytaj stan logiczny wejścia I0
AND
%I0.1
połącz funkcją iloczynu logicznego z wejściem I1 (zarazem
koniec bloku)
OR(
%I0.2
otwórz nawias funkcją sumy logicznej i czytaj stan logiczny
wejścia I2
AND
%I0.3
połącz funkcją iloczynu logicznego z wejściem I3 (zarazem
koniec bloku)
)
zamknij nawias
ST
%Q0.0
wynik powyższej funkcji przypisz do wyjścia Q0
LD
%I0.4
czytaj stan logiczny wejścia I4
OR
%I0.5
połącz funkcją sumy logicznej z wejściem I5 (zarazem koniec
bloku)
AND(
%I0.6
otwórz nawias funkcją iloczynu logicznego i czytaj stan
logiczny wejścia I6
OR
%I0.7
połącz funkcją sumy logicznej z wejściem I7
)
zamknij nawias
OR
%I0.10
połącz funkcją sumy logicznej z wejściem I10
ST
%Q0.1
wynik powyższej funkcji przypisz do wyjścia Q1
END
MPS –
zrzucenie wartości na stos
MRD –
odczyt wartości ze stosu bez kasowania na stosie
MPP –
odczyt wartości ze stosu z kasowaniem na stosie
Rys. 23.
Zastosowanie funkcji MPS, MRD i MPP [opracowanie własne]
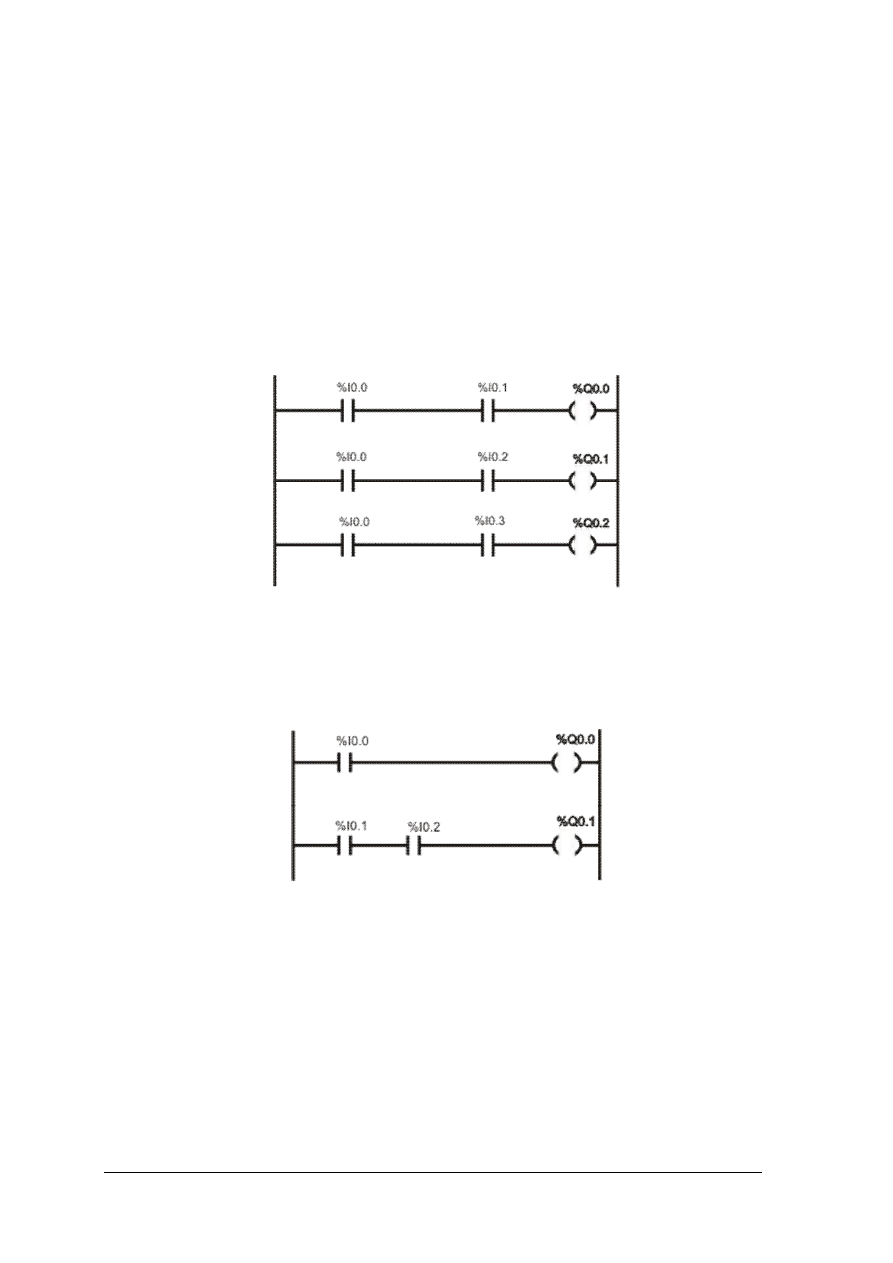
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
53
Przykładowy program do układu z rys. 23:
LD
%I0.0
czytaj stan logiczny wejścia I0
MPS
zrzucenie wartości na stosie
AND
%I0.1
połącz funkcją iloczynu logicznego z wejściem I1
ST
%Q0.0
wynik powyższej funkcji przypisz do wyjścia Q0
MRD
odczyt wartości ze stosu bez kasowania na stosie
AND
%I0.2
połącz funkcją iloczynu logicznego z wejściem I2
ST
%Q0.1
wynik powyższej funkcji przypisz do wyjścia Q1
MPP
odczyt wartości ze stosu z kasowaniem na stosie
AND
%I0.3
połącz funkcją iloczynu logicznego z wejściem I3
ST
%Q0.2
wynik powyższej funkcji przypisz do wyjścia Q2
END
Bez stosowania funkcji MPS, MRD, MPP powyższy układ wyglądałby jak na rys. 23:
Rys. 24. Układ do rys. 23. bez zastosowania funkcji MPS, MRD i MPP [opracowanie własne]
NOP – funkcja pusta; nie wykonuje się żadna logiczna operacja (daje tylko zwłokę
czasową w programie
END – zakończenie programu
Przykład 1:
Rys. 25. Przykładowy układ połączeń [opracowanie własne]
Przykładowy program do układu z rys. 25:
LD
% I0.0
ST
% Q0.0
LD
% I0.1
AND
% I0.2
ST
%Q0.1
END
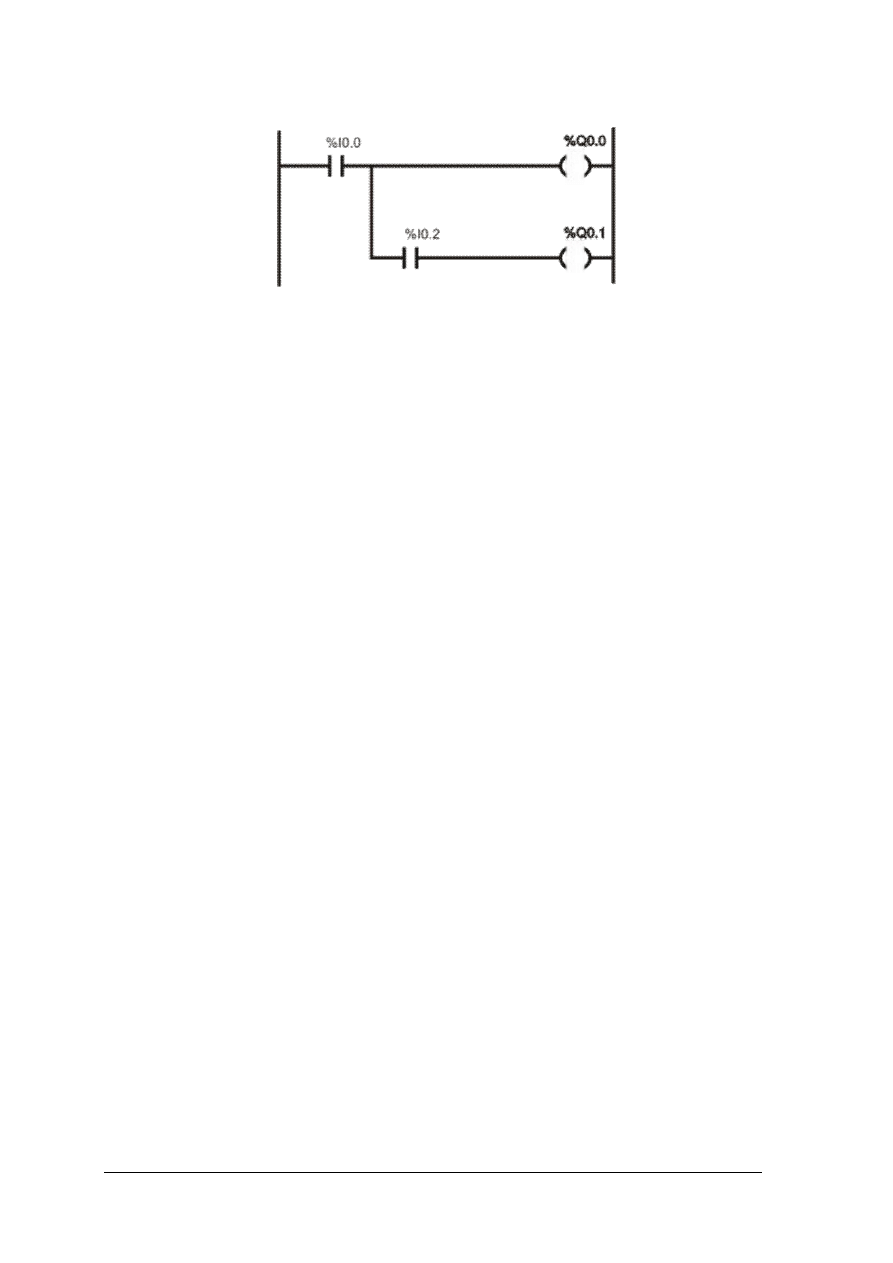
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
54
Przykład 2:
Rys. 26.
Przykładowy układ połączeń [opracowanie własne]
Przykładowy program do układu z rys. 26:
LD
% I0.0
ST
% Q0.0
NOP
AND
% I0.2
ST
% Q0.1
END
4.5.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz. czy jesteś przygotowany do wykonania ćwiczeń.
1. Co to znaczy, że sterownik jest swobodnie programowalny?
2. Dlaczego układy sterowane przez sterowniki PLC są lepsze od układów z tradycyjnym
sterowaniem stycznikowym?
3. Jakie znasz urządzenia sterowane przez sterowniki PLC?
4. W jaki sposób programuje się sterownik PLC?
5. Jak testujemy prawidłowość funkcjonowania programy sterowniczego?
6. Na czym polega usunięcie błędu w sterowaniu stycznikowym, a na czym w sterowaniu
sterownikiem PLC?
4.5.3. Ćwiczenia
Ćwiczenie 1
Uruchom układ wyłączenia z opóźnieniem. Poniższy układ załącza wyjście Q0 w chwili
załączenia wejścia I0, a wyłącza wspomniane wyjście po nastawionym w module czasowym
czasie od wyłączenia wejścia I0.
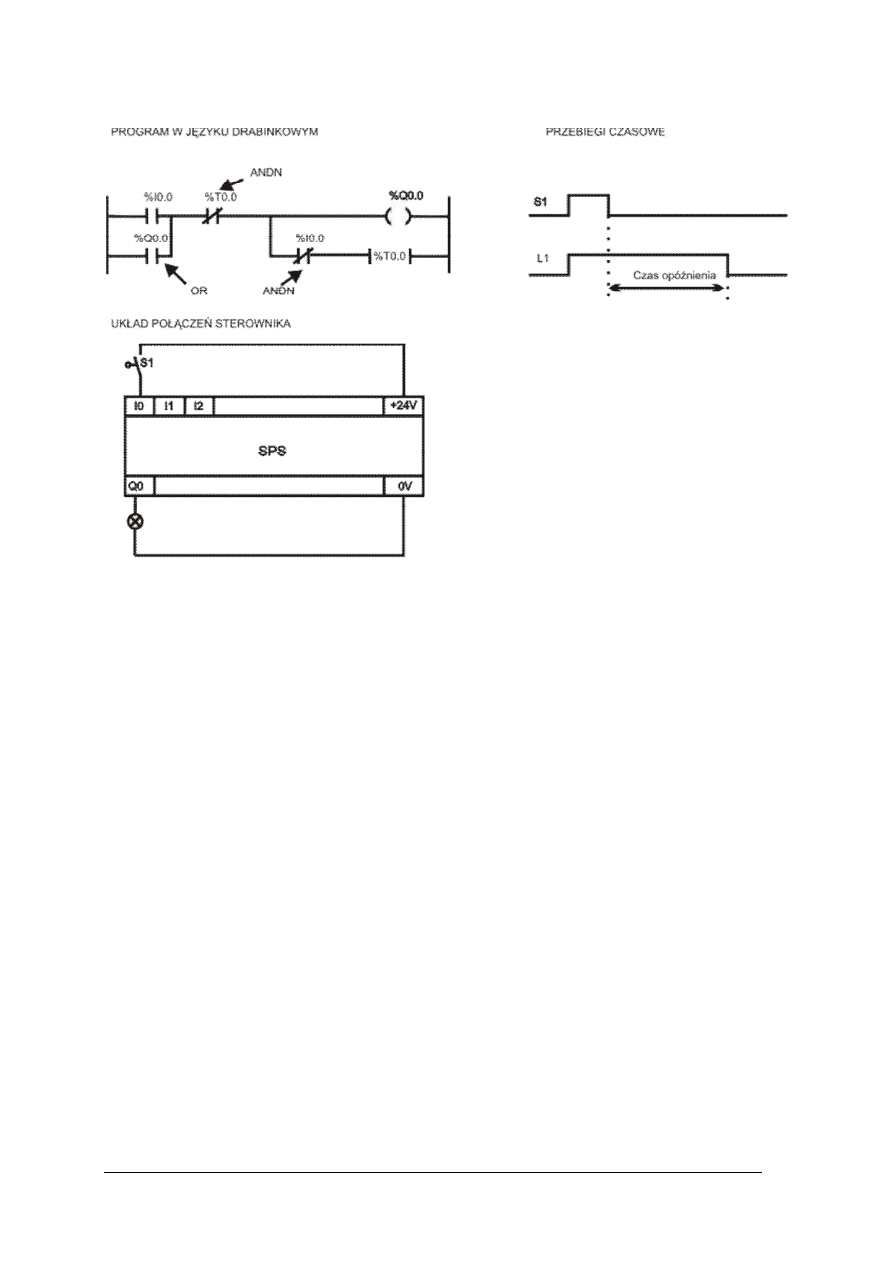
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
55
Rys. do ćwiczenia 1
Przykładowy program (do rys. do ćwiczenia 1):
LD
% I0.0
czytaj stan logiczny wejścia I0
OR
% Q0.0
połącz funkcją sumy logicznej z wyjściem Q0
ANDN % T0.0
połącz
funkcją
negacji
iloczynu
logicznego
z modułem;czasowym T0
ST
% Q0.0
wynik powyższej funkcji przypisz do wyjścia Q0
ANDN % I0.0
połącz funkcją negacji iloczynu logicznego z wejściem I0
IN
% T0.0
uruchom czas opóźnienia T0
END
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) rozpoznać elementy na schemacie oraz zidentyfikować adresy wejść i wyjść
w sterowniku,
2) zidentyfikować odpowiednie łączniki połączone ze sterownikiem zgodnie ze schematem,
3) połączyć sterownik z komputerem przy pomocy interfejsu użytkownika,
4) włączyć komputer i uruchomić oprogramowanie sterownika,
5) wpisać wybrany program do edytora oprogramowania sterownika,
6) zapisać program na dysku i wpisać go do pamięci sterownika,
7) uruchomić sterownik,
8) przetestować pracę sterownika obserwując zachowanie lampki L1,
9) zapisać spostrzeżenia w zeszycie i wyciągnąć wnioski,
10) wyłączyć sterownik i komputer,
11) odłączyć interfejs.
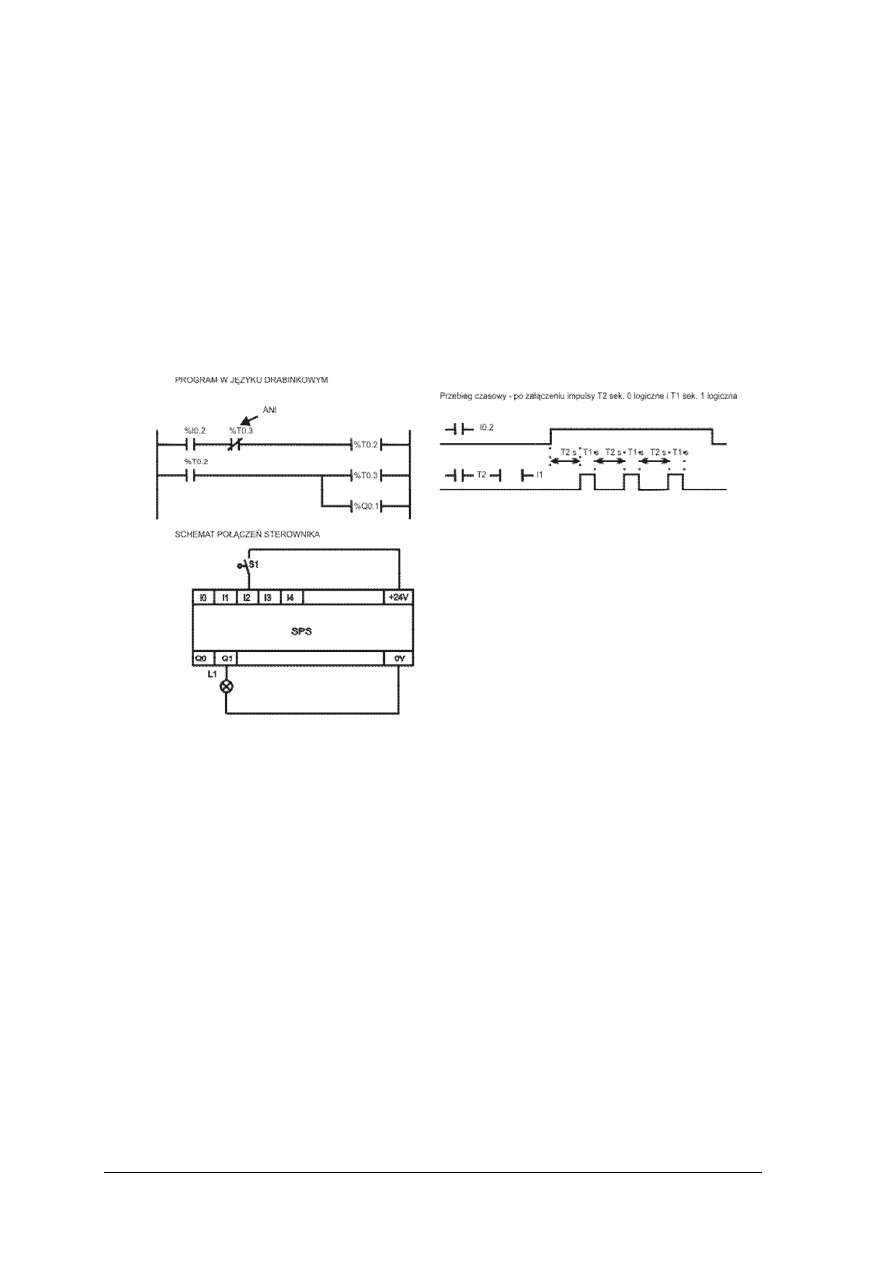
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
56
Wyposażenie stanowiska pracy:
−
stanowisko montażowe ze sterownikiem,
−
komputer z oprogramowaniem dla sterownika,
−
interfejs łączący sterownik z komputerem,
−
łącznik zwierne monostabilny,
−
łącznik zwierny bistabilny,
−
lampki kontrolne,
−
przewody łączeniowe,
−
narzędzia monterskie.
Ćwiczenie 2
Uruchom generator impulsów zgodnie z poniższym przebiegiem czasowym.
Rys. do ćwiczenia 2
Przykładowy program (do rys. do ćwiczenia 2):
LD
% I0.2
czytaj stan logiczny wejścia I2
ANDN % T0.3
połącz funkcją negacji iloczynu logicznego z modułem
czasowym T3
IN
% T0.2
uruchom moduł czasowy T2
LD
T2
czytaj stan logiczny modułu czasowego T2
IN
T3
uruchom moduł czasowy T3
ST
% Q0.1
wynik powyższej funkcji przypisz do wyjścia Q1
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) rozpoznać elementy na schemacie oraz zidentyfikować adresy wejść i wyjść
w sterowniku,
2) zidentyfikować odpowiednie łączniki połączone ze sterownikiem zgodnie ze schematem,
3) połączyć sterownik z komputerem przy pomocy interfejsu użytkownika,
4) włączyć komputer i uruchomić oprogramowanie sterownika,
5) wpisać wybrany program do edytora oprogramowania sterownika,
6) zapisać program na dysku i wpisać go do pamięci sterownika,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
57
7) uruchomić sterownik,
8) przetestować pracę sterownika obserwując zachowanie lampki L1,
9) spostrzeżenia zapisać w zeszycie i wyciągnąć wnioski,
10) wyłączyć sterownik i komputer,
11) odłączyć interfejs.
Wyposażenie stanowiska pracy:
−
stanowisko montażowe ze sterownikiem,
−
komputer z oprogramowaniem dla sterownika,
−
interfejs łączący sterownik z komputerem,
−
łącznik zwierne monostabilny,
−
łącznik zwierny bistabilny,
−
lampki kontrolne,
−
przewody łączeniowe,
−
narzędzia monterskie.
4.5.4. Sprawdzian postępów
Czy potrafisz
Tak
Nie
1)
wyjaśnić znaczenie pojęcia tradycyjne sterowanie stycznikowe?
2)
wyjaśnić znaczenie pojęcia sterowanie przy pomocy PLC?
3)
wyjaśnić znaczenie pojęcia interfejs użytkownika?
4)
wyjaśnić znaczenie pojęcia schemat drabinkowy?
5)
wyjaśnić znaczenie pojęcia schemat ideowy?
6)
wyjaśnić znaczenie pojęcia merker?
7)
uruchomić komputerowe oprogramowanie sterownika?
8)
połączyć sterownik z komputerem przy pomocy interfejsu użytkownika?
9)
wpisać program do edytora komputera?
10) wpisać program z edytora do sterownika i uruchomić program
w sterowniku?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
58
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1. Przeczytaj uważnie instrukcję.
2. Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3. Zapoznaj się z zestawem zadań testowych.
4. Test zawiera 20 zadań. Do każdego zadania dołączone są 4 możliwości odpowiedzi.
Tylko jedna jest prawidłowa.
5. Udzielaj odpowiedzi tylko na załączonej karcie odpowiedzi, stawiając w odpowiedniej
rubryce znak X. W przypadku pomyłki należy błędną odpowiedź zaznaczyć kółkiem,
a następnie ponownie zakreślić odpowiedź prawidłową.
6. Pracuj samodzielnie, bo tylko wtedy będziesz miał satysfakcję z wykonanego zadania.
7. Jeśli udzielanie odpowiedzi będzie Ci sprawiało trudność, wtedy odłóż jego rozwiązanie
na później i wróć do niego, gdy zostanie Ci czas wolny.
8. Na rozwiązanie testu masz 25 minut.
Powodzenia!
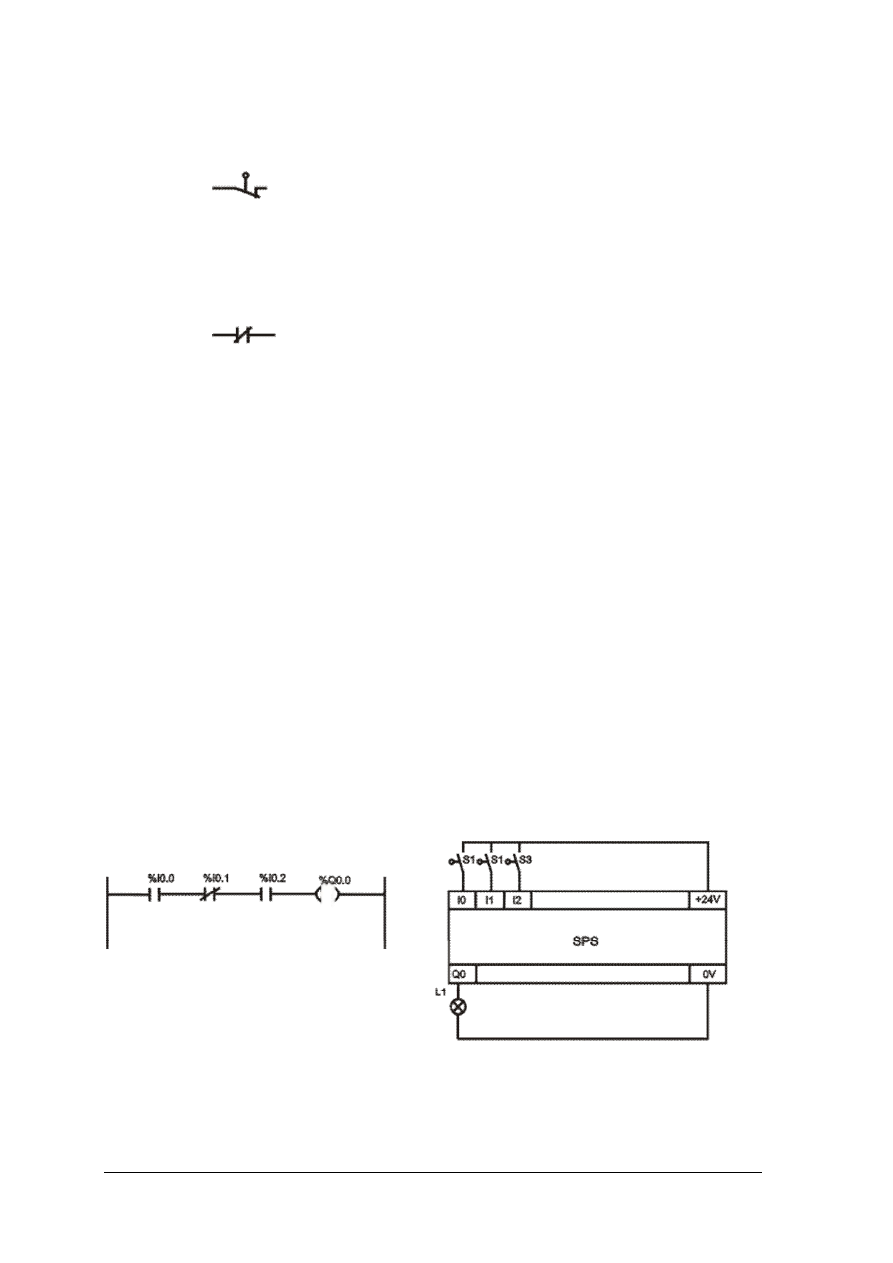
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
59
ZESTAW ZADAŃ TESTOWYCH
1. Na rysunku przedstawiono symbol
a) styku zwiernego.
b) styku rozwiernego.
c) bezpiecznika elektromagnetycznego.
d) łącznika normalnie otwartego.
2. Poniższy symbol styku stosujemy w schemacie
a) ideowym.
b) funkcjonalnym.
c) podłączenia do sterownika PLC.
d) drabinkowym.
3. Oznaczenie %I0.2 odnosi się do
a) wyjścia sterownika.
b) modułu inercyjnego sterownika.
c) wejścia sterownika.
d) modułu czasowego sterownika.
4. Oznaczenie %Q0.0 odnosi się do
a) wyjścia sterownika.
b) modułu inercyjnego sterownika.
c) wejścia sterownika.
d) modułu czasowego sterownika.
5. Na początku każdego cyklu programowego praca sterownika polega na
a) ustawieniu wszystkich wyjść sterownika.
b) odczytaniu wartości z wejść i wyjść sterownika.
c) analizie programu sterownika.
d) oczekiwaniu na sygnał od użytkownika lub z obiektu automatyzowanego.
6. Lampka L1 na poniższym schemacie zapali się gdy:
a) naciśniemy dowolny z łączników S1 do S3.
b) nie można udzielić odpowiedzi bez znajomości programu.
c) po naciśnięciu wszystkich łączników S1 do S3 jednocześnie.
d) po naciśnięciu łącznika S1 i S3.
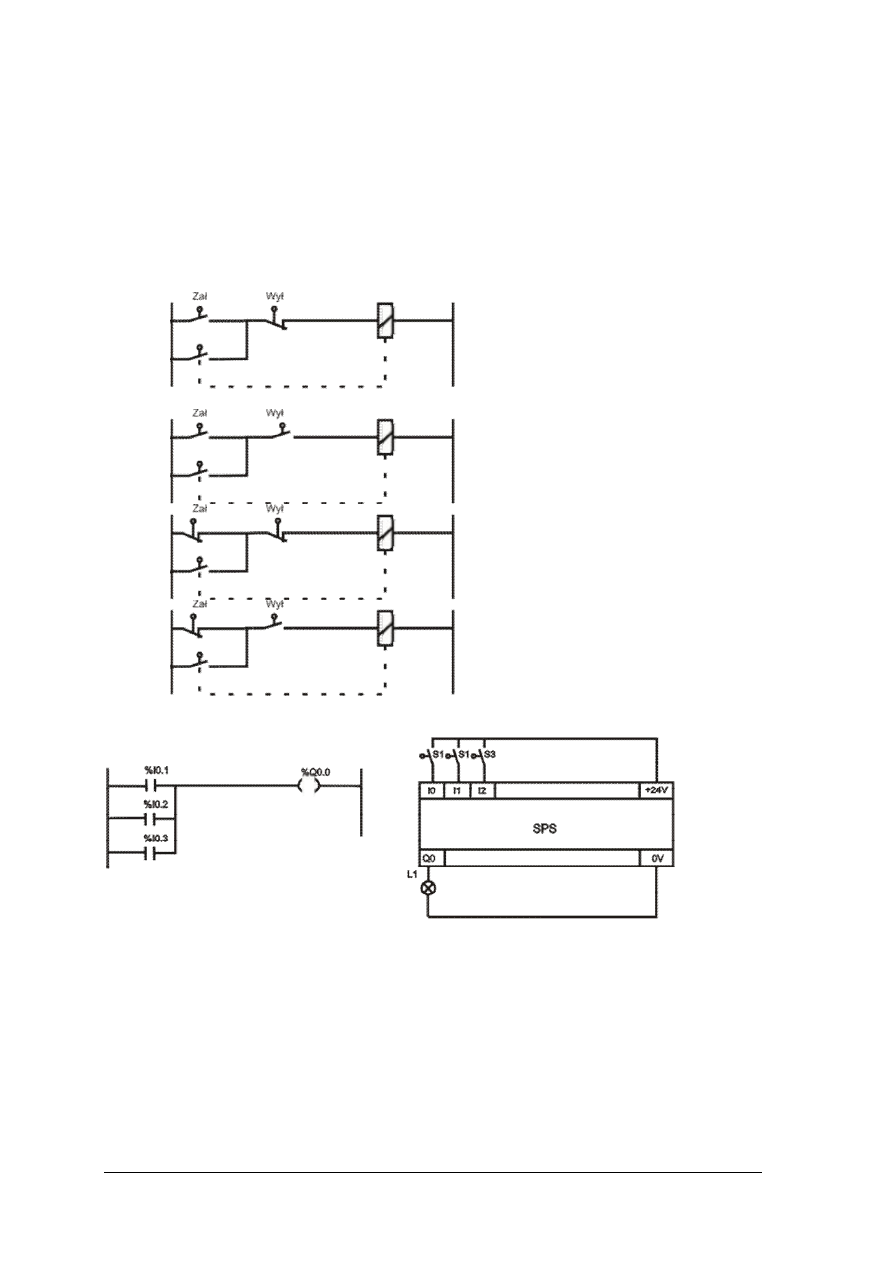
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
60
7. Określ przyczynę błędu sterownika, jeżeli świeci się lampka ERROR i zgaszona jest
lampka RUN na wskaźniku trybu pracy sterownika to
a) program nie został załączony.
b) wewnętrzny błąd sterownika lub źle napisany program.
c) błąd w zasilaniu bateryjnym.
d) sterownik podstawowy oczekuje na sygnał ze sprzętu rozszerzonego.
8. Przeanalizuj poniższe układy sterowania załączaniem oraz wyłączaniem. Najlepiej
wymogi bezpieczeństwa spełnia układ
a)
b)
c)
d)
9. Oznaczenia i symbole na poniższych schematach są
a) prawidłowe.
b) zamiast oznaczenie wejścia I0.3 powinno być I0.0.
c) zamiast oznaczenie wejścia I0.1 powinno być I0.0.
d) nie można odpowiedzieć bez znajomości programu.
10. Ze względu na budowę sterowniki PLC dzielimy na
a) duże, średnie i małe.
b) kompaktowe i modułowe.
c) dwustanowe i analogowe.
d) zasilane napięciem stałym i przemiennym.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
61
11. Do obsługi całej linii produkcyjnej lub kilku węzłów technologicznych służy sterownik
a) mały.
b) średni.
c) duży.
d) nie ma takiego sterownika.
12. Sygnał 1 logicznej na wejściu sterownika odpowiada napięciu
a) 5 V DC.
b) +24 V DC.
c) 24 V AC.
d) 23 V AC.
13. Sygnał 1 pojawia się na wejściu sterownika kiedy
a) łącznik zwierny jest wciśnięty.
b) łącznik zwierny jest nie wciśnięty.
c) łącznik rozwierny jest wciśnięty.
d) zdecyduje o tym program.
14. Czas jednego cyklu programowego zależy od
a) długości połączeń urządzeń wejściowych i wyjściowych.
b) ilości i rodzaju podłączonych wejść i wyjść.
c) długości programu, rodzaju operacji i ilości urządzeń rozszerzających.
d) szybkości komputera z którego wpisano do sterownika program.
15. Program w pracującym sterowniku PLC może znajdować się w pamięci
a) tylko ROM.
b) tylko EPROM.
c) RAM lub EEPROM.
d) tylko na dysku komputera.
16. Po zaniku napięcia zasilającego tracimy zawartość pamięci
a) ROM.
b) EPROM.
c) EEPROM.
d) RAM.
17. Interfejs służy do
a) podłączenia do wejść sterownika PLC czujników optycznych.
b) podłączenia do wyjścia sterownika PLC odbiornika o dużym obciążeniu.
c) połączenia sterownika PLC z komputerem.
d) podłączenia do wyjścia sterownika silnika krokowego.
18. Którego ze sterowników nie można rozbudować (przekonfigurować):
a) kompaktowego.
b) modułowego.
c) kompaktowego i modułowego.
d) można każdy.
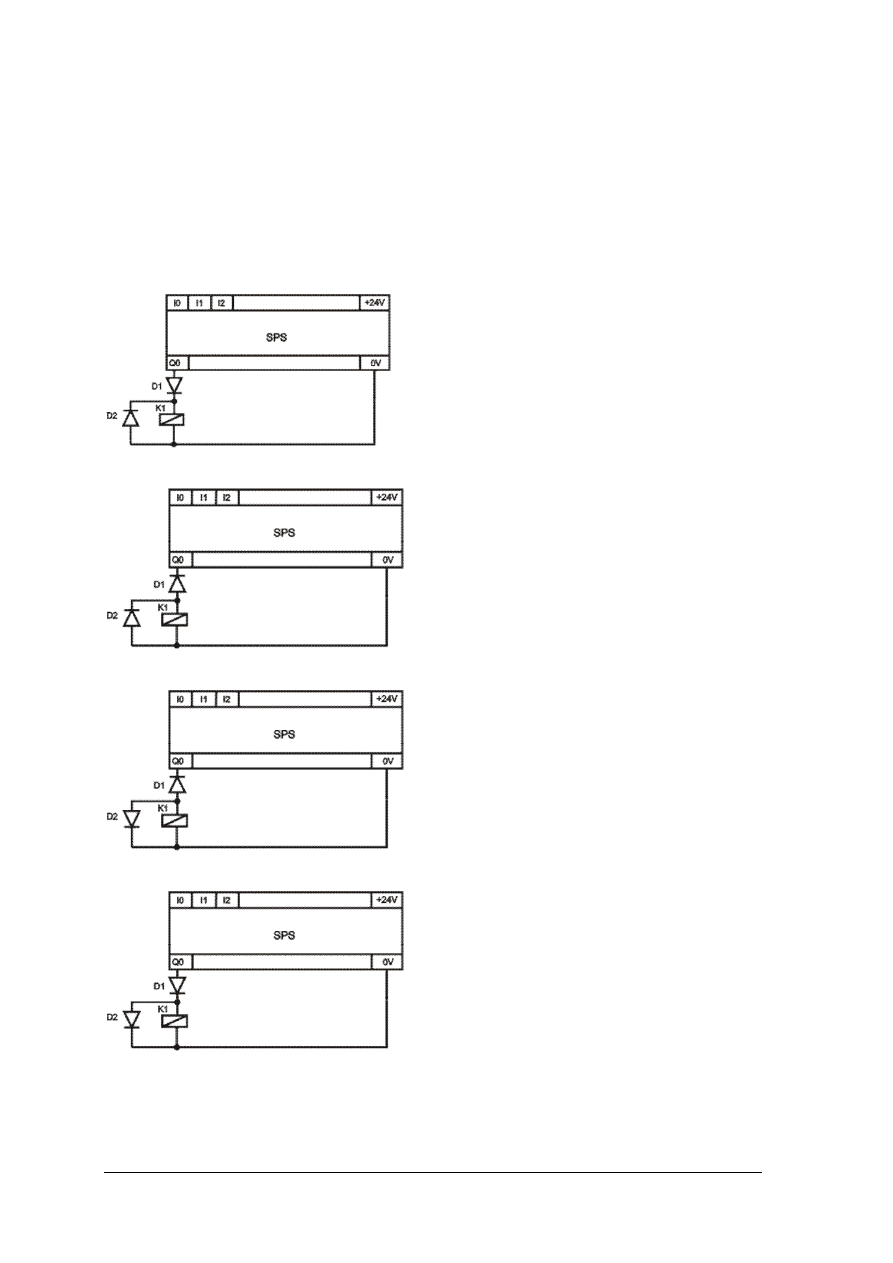
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
62
19. Do poszukiwania usterki polegającej na braku zmiany sygnału na wejściu sterownika
używamy przyrządów pomiarowych:
a) amperomierzy.
b) watomierzy.
c) woltomierza i omomierza.
d) waromierza.
20. Wyjście sterownika przed przepięciem od cewki przekaźnika zabezpiecza układ
a)
b)
c)
d)
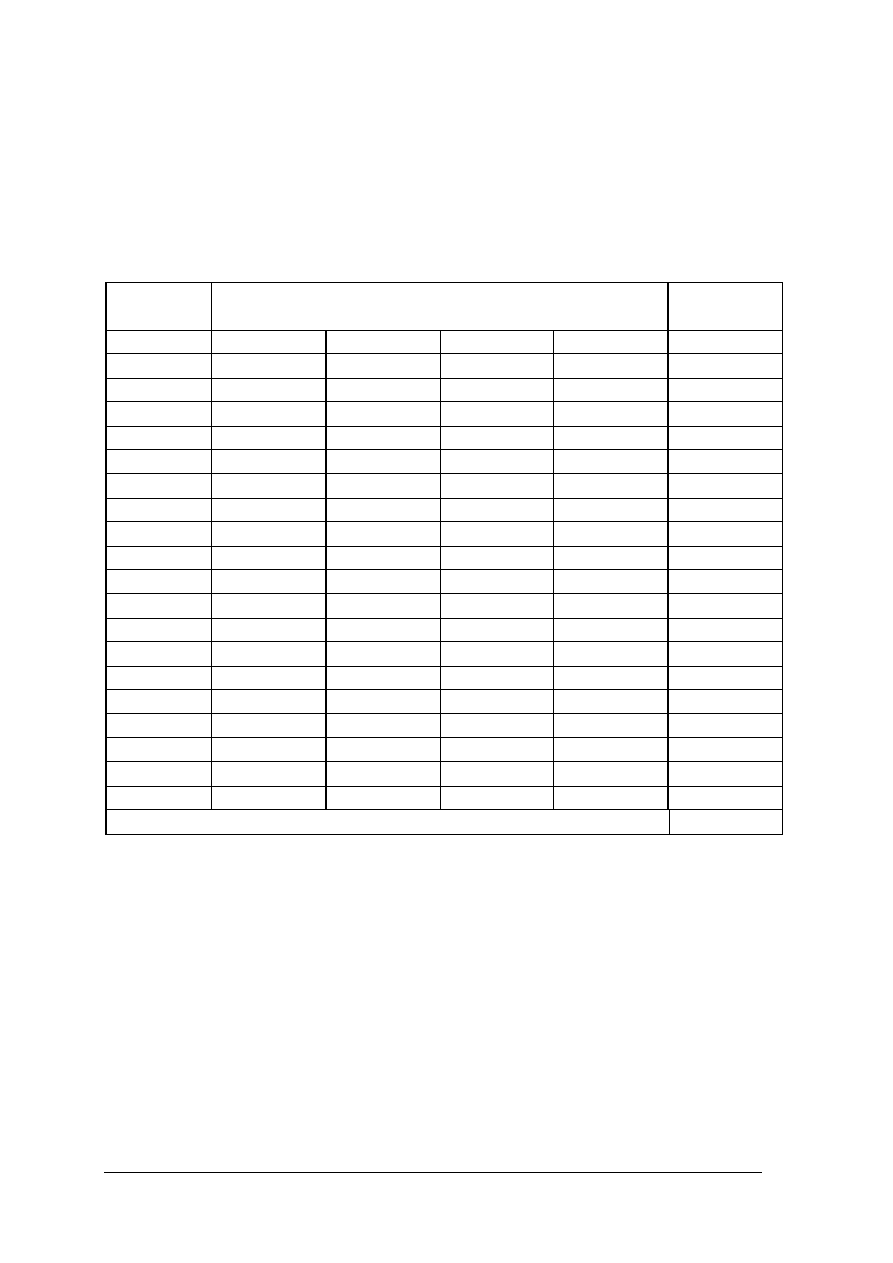
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
63
KARTA ODPOWIEDZI
Imię i nazwisko..........................................................................................
Stosowanie sterowników i komputerów w automatyce
Zakreśl poprawną odpowiedź.
Nr
zadania
Odpowiedź
Punkty
1
a
b
c
d
2
a
b
c
d
3
a
b
c
d
4
a
b
c
d
5
a
b
c
d
6
a
b
c
d
7
a
b
c
d
8
a
b
c
d
9
a
b
c
d
10
a
b
c
d
11
a
b
c
d
12
a
b
c
d
13
a
b
c
d
14
a
b
c
d
15
a
b
c
d
16
a
b
c
d
17
a
b
c
d
18
a
b
c
d
19
a
b
c
d
20
a
b
c
d
Razem:
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
64
6. LITERATURA
1. Podręcznik LOGO! Siemens.
2. Podręcznik S7–200 Siemens.
3. Podręcznik S7–300 Siemens.
4. Podręcznik S7–400 Siemens.
5. Twido. Sterowniki programowalne instrukcja programowania.
Strony internetowe:
1. www.sterowniki.pl
2. www.automatyka.siemens.pl
3. www.schneider–electric.pl
4. www.wikipedia.pl
Wyszukiwarka
Podobne podstrony:
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z1 02 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z1 02 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o1 02 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o1 02 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 02 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z3 02 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 04 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o2 03 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 03 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o2 01 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 04 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o1 01 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o1 03 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o1 03 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z3 01 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 01 u
więcej podobnych podstron