19/11/2013
1
Przekładnie zębate
Janusz Skrzypacz
Przełożenie przekładni
v
v
n
n
i
2
1
2
1
2
1
r
v
prędkość na wale wejściowym
prędkość na wale wyjściowym
i=
Przełożenie kinematyczne
Przełożenie geometryczne
D
D
r
r
v
r
r
v
i
1
2
1
2
2
2
1
1
2
1
v=const
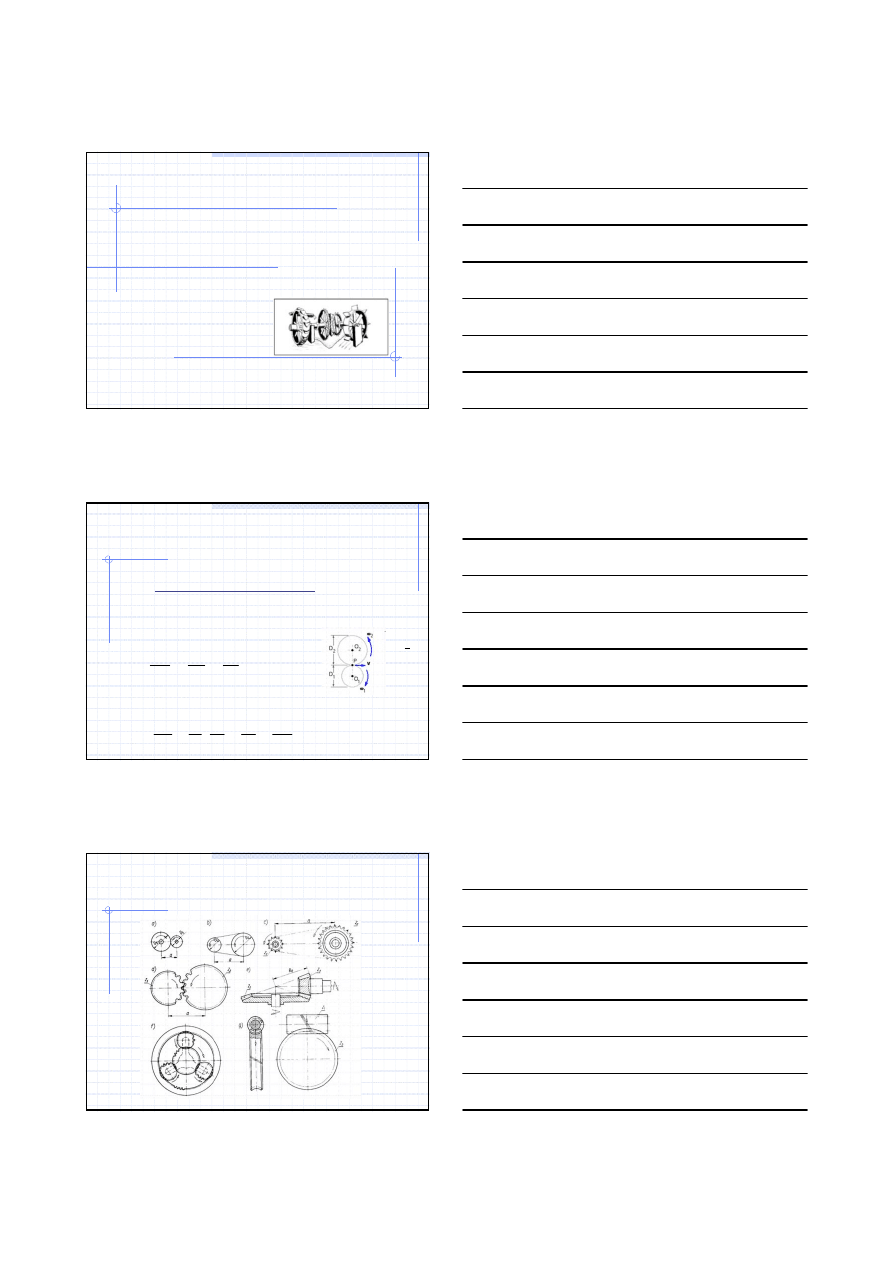
Typy przekładni mechanicznych
19/11/2013
2
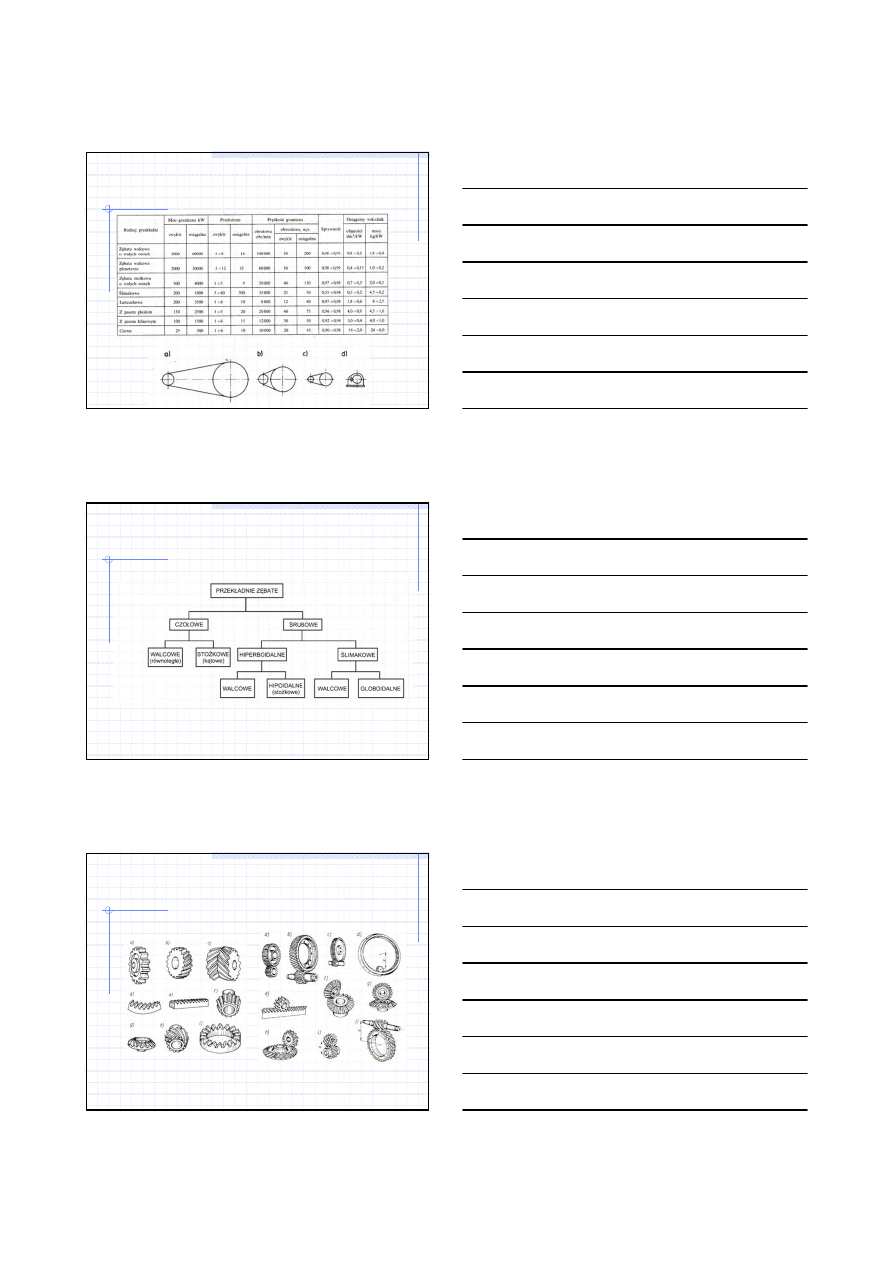
Porównanie przekładni mechanicznych
Podział przekładni zębatych
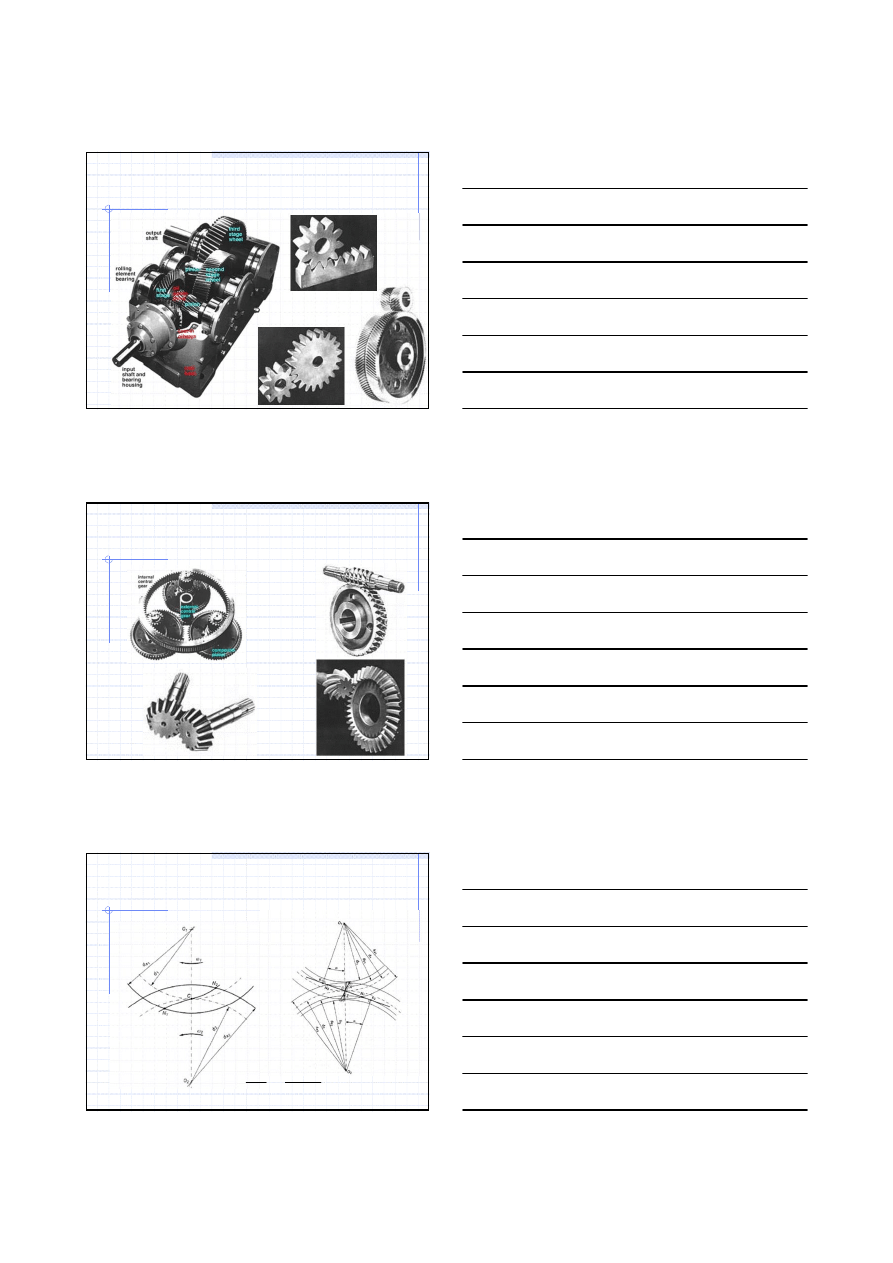
Typy przekładni zębatych
19/11/2013
3
Typy przekładni zębatych
Typy przekładni zębatych
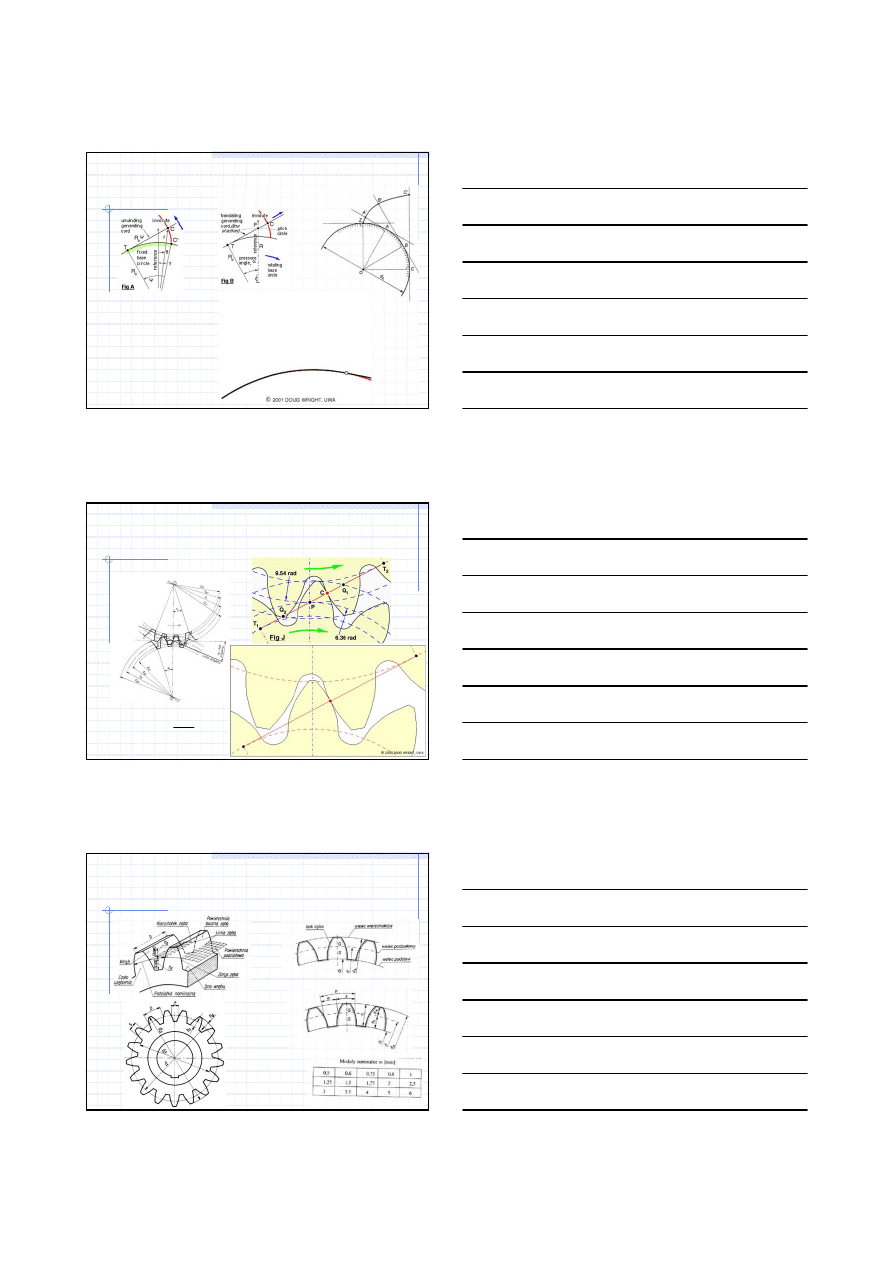
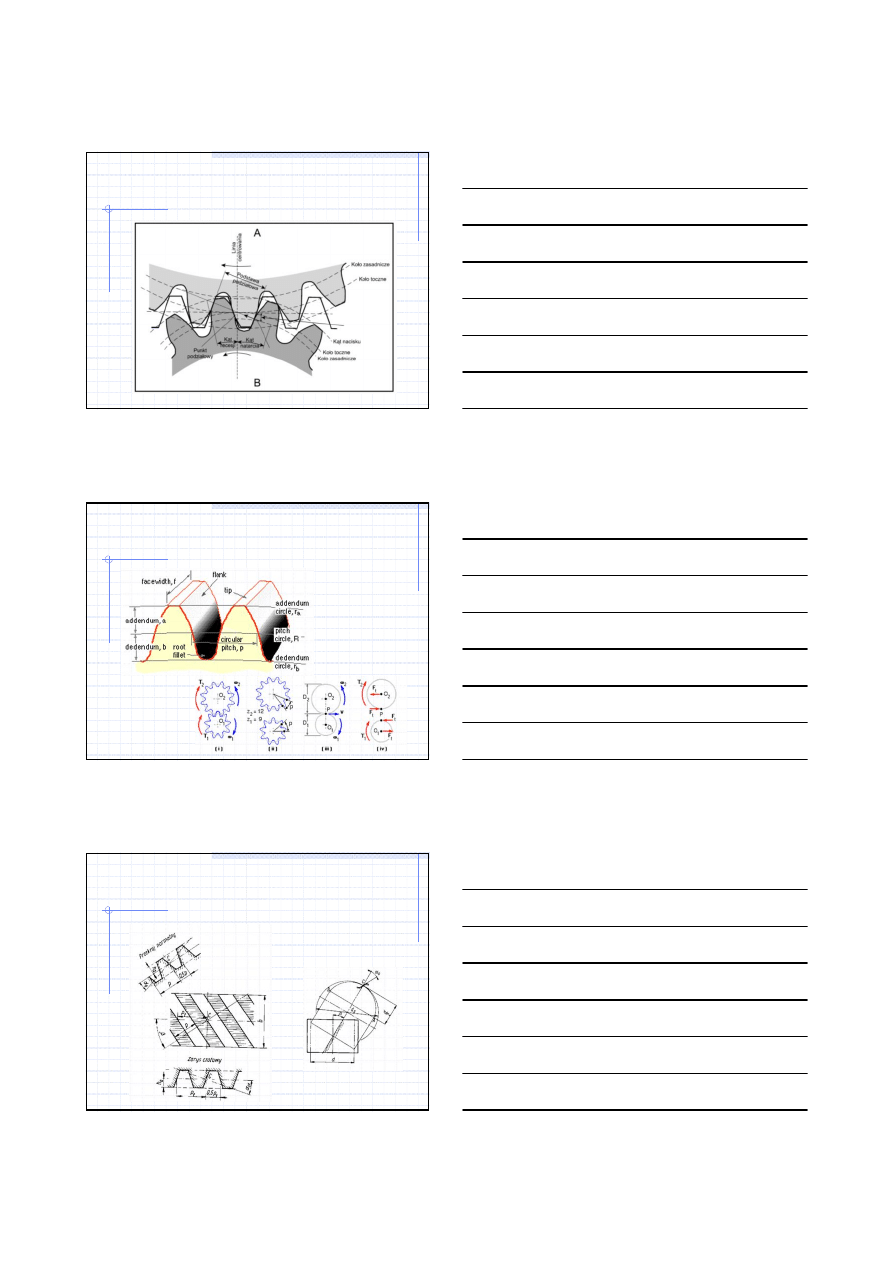
Prawo zazębienia
C
O
C
O
i
1
2
2
1
19/11/2013
4
Ewolwenta
Przypór
p
e
b
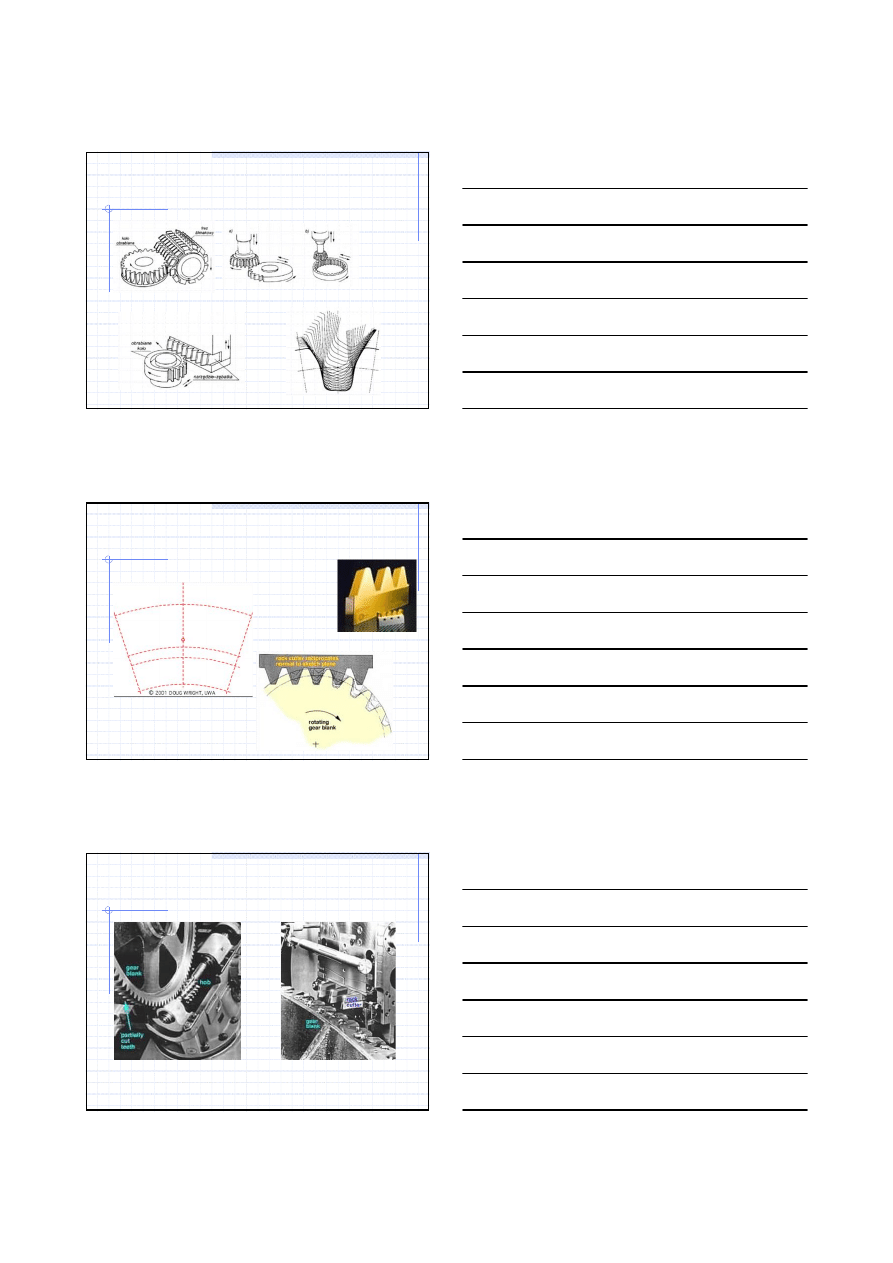
Nomenklatura i kinematyka - pl
19/11/2013
5
Nomenklatura i kinematyka - pl
Nomenklatura i kinematyka - en
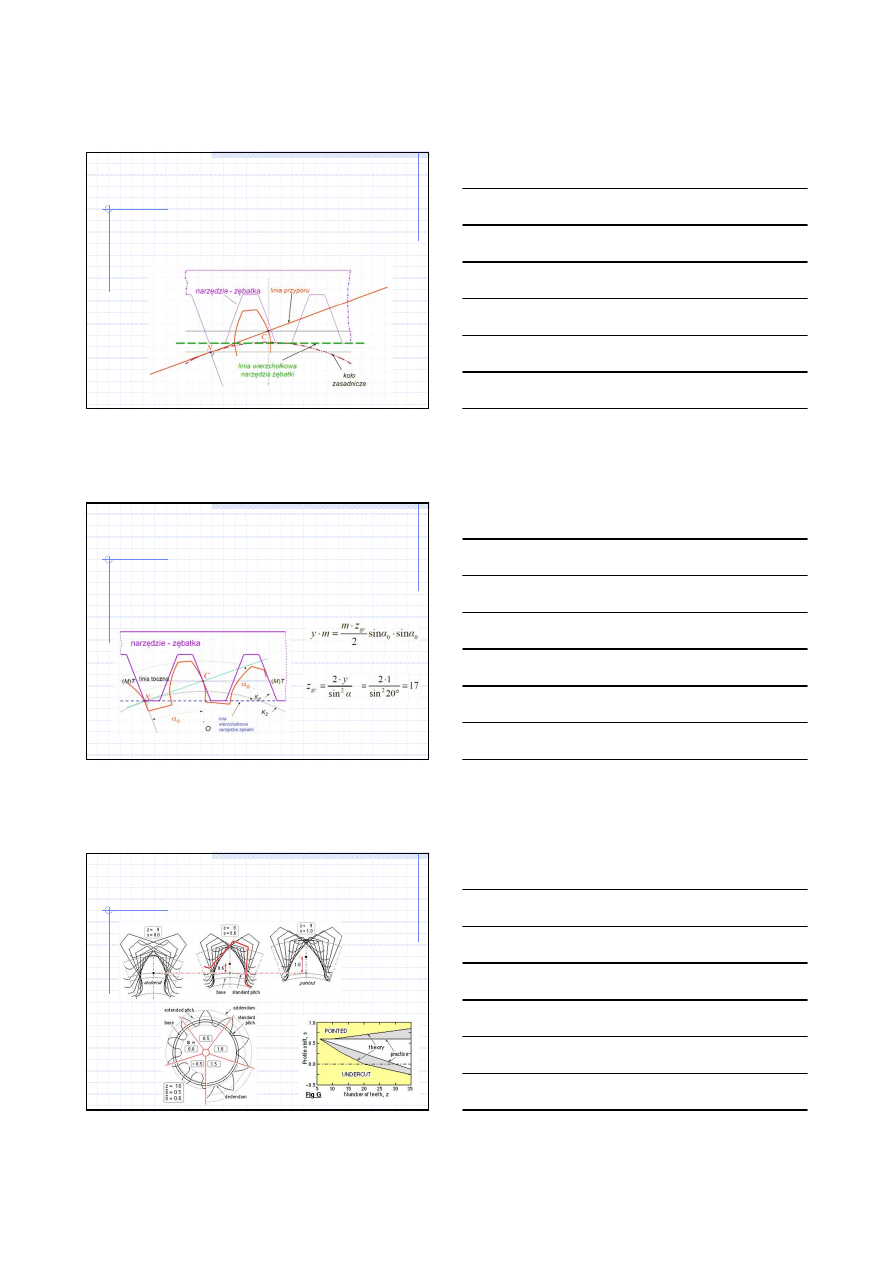
Nomenklatura – zęby skośne
19/11/2013
6
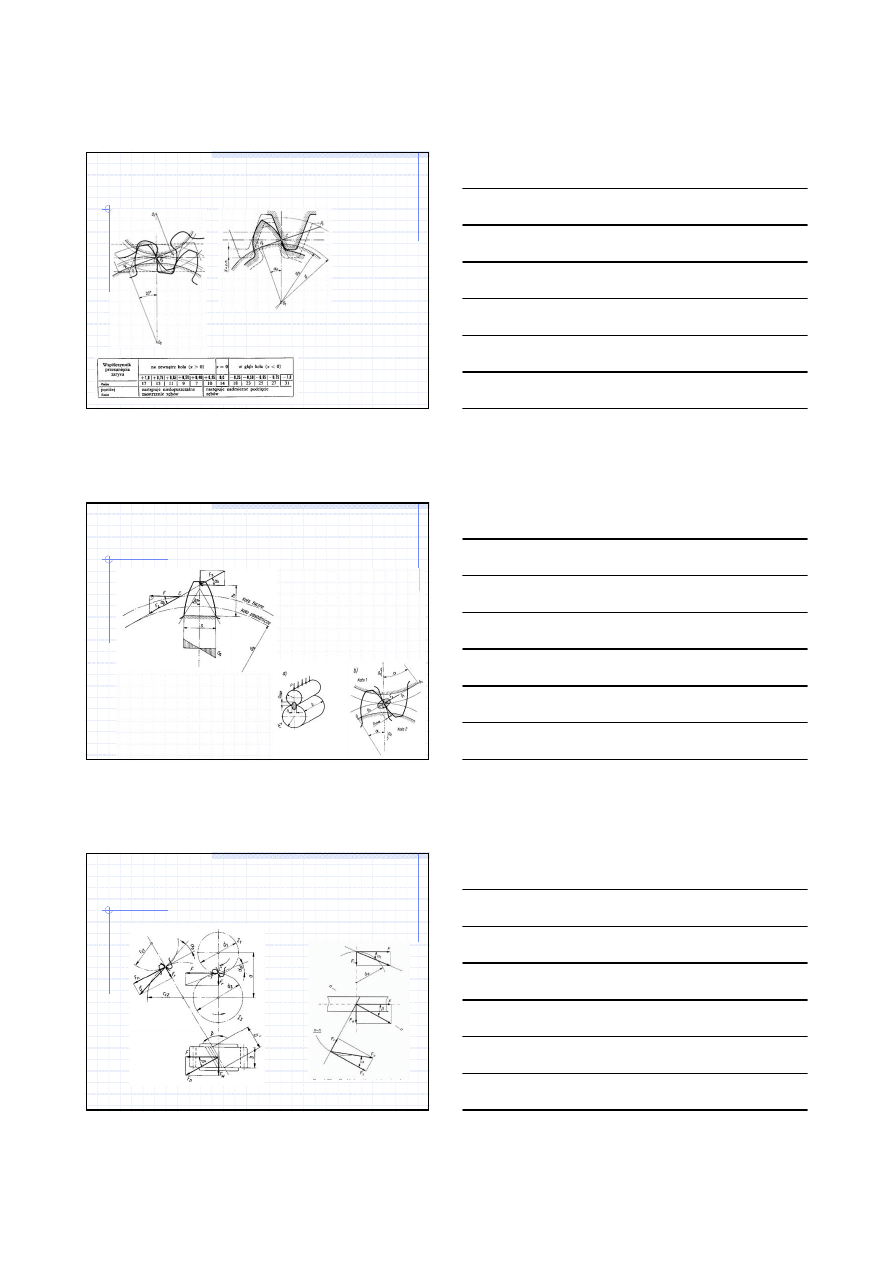
Metody nacinania zębów
Nacinanie zębów
Nacinanie zębów
19/11/2013
7
Korekcja
Podcięcie zęba nie nastąpi wówczas, gdy linia wierzchołkowa narzędzia
zębatki przetnie linię przyporu (styczną do koła zasadniczego) w
granicach między punktami
N
i
C
.
Korekcja
W celu wyznaczenia granicznej liczby zębówrozpatrzmy
przypadek kiedy linia wierzchołkowa narzędzia
zębatkipokrywa sięz punktem
N.
Korekcja
19/11/2013
8
Korekcja
Dodatnie
(x > 0) – przesunięcie zarysu zęba umożliwia nacięcie koła dla
zmin = 7. x = (0,4 1) – o minimalnej liczbie zębów zadecyduje
zaostrzenie wierzchołków – nie podcięcie.
Ujemne
(x < 0) – przesunięcie zarysu w głąb koła. Wartości zmin rosną.
Np. w kole o z = 23 można zastosować przesunięcie ujemne x = - 0,5.
Siły w zazębieniu – zęby proste
Siły w zazębieniu – zęby skośne
Wyszukiwarka
Podobne podstrony:
Przek adnie zebate 10 2005 cz2
Wytwarzanie walcowego koła zębatego
projekt przekładnie zębate3
Czy orientuje się ktoś jaki jest potrzebny wzór na Dp0 dla koła zębatego
Przekładnie zębate 2
00 01 05 Kolo zebate stozkowe male 1
koło zębate
024 3 1 legal przek
Koło zębate 42 L 050 2F EBMiA
PRZEK+üADNIA Z BATA, PKM egzamin kolosy ( łukasik, Salwiński )
Przekładnie zębate
Koła zębate laborka
Koło zębate
15. Karta kontrolna, Politechnika Lubelska, Studia, Studia, Sprawka 5 semestr, technologia maszyn tu
Sprawozdanie Koła zębate
Kolo zebate id 237314 Nieznany
więcej podobnych podstron