
1. Programowanie strukturalne i obiektowe.
2. Fala elektromagnetyczna: typy, paramet1. Programowanie struktry, właściwości.
3. Tranzystory bipolarne i unipolarne: budowa, właściwości i zastosowania.
4. Systemy ciągłe i dyskretne: klasyfikacja i opis.
5. Zmienna losowa: właściwości i opis.
6. Ciągła, dyskretna i szybka transformata Fouriera, widmo sygnału.
7. Modulacje analogowe i cyfrowe.
8. Wzmacniacze operacyjne: właściwości i we.
13. Bazy danych i ich zastosowania.
14. Przetwarzanie obrazów, metody ich zastosowania.
15. Miary
i oceny dokładności algorytmów przybliżonych.
16. Systemy operacyjne komputerów.
17. Zadania optymalizacji i techniki ich rozwiązywania.
18. Systemy dynamiczne, opisy własności.
19. Programowanie w systemie operacyjnym UNIX.
20. Komputer, architektura i oprogramowanie.
1. Programowanie strukturalne i obiektowe.
Programowanie strukturalne
– metodyka opracowywania, organizacji i pisania programów komputerowych, prowadząca do
uzyskania programów o zwięzłych, przejrzystych i łatwych do analizy strukturach, wykorzystujących procedury (podprogramy)
tworzone osobno dla realizacji określonych zadań i wywoływane w odpowiednich miejscach programu głównego. Opisywane są
kolejno czynności, które muszą zostać wykonane, aby osiągnięty został cel zadania. Dane przekazywane poprzez wartości
zwracane i argumenty funkcji. Zalecane jest unikanie zmiennych globalnych w związku z istnieniem niebezpieczeństwa zmiany
wartości zmiennej przez dowolną funkcję. Obecnie prawie wszystkie popularne języki programowania spełniają wymogi
programowania strukturalnego. Programowanie strukturalne cechuje się prostotą zapisu programu, dlatego jest bardzo
przydatne zwłaszcza w początkowych fazach nauki programowania, chociaż ze względu na zużyty czas lub pamięć często nie
jest optymalną metodą programowania.
Programowanie obiektowe (ang. object-oriented programming)
– metodyka tworzenia programów komputerowych, która
definiuje programy za pomocą "obiektów" – elementów łączących stan (czyli dane) i zachowanie (czyli procedury, tu: metody).
Ob
iektowy program komputerowy wyrażony jest jako zbiór takich obiektów, komunikujących się pomiędzy sobą w celu
wykonywania zadań. Podejście to rożni się od tradycyjnego programowania proceduralnego, gdzie dane i procedury nie są ze
sobą bezpośrednio związane. Programowanie obiektowe ma ułatwić pisanie, konserwację i wielokrotne użycie programów lub
ich fragmentów. Największym atutem programowania, projektowania oraz analizy obiektowej jest zgodność takiego podejścia z
rzeczywistością– mozg ludzki jest w naturalny sposób najlepiej przystosowany do takiego podejścia przy przetwarzaniu
informacji. Jest to najbardziej naturalny sposób rozumienia rzeczywistości; podstawową cechą mózgu ludzkiego jest
klasyfikacja
– łączenie występujących w rzeczywistości obiektów w grupy – klasy. Odbywa się to na podstawie wspólnych cech
dla grup obiektów – w tym podobnych zachowań.
Podstawowe cechy języków programowania, które czynią je obiektowymi, to:
●
abstrakcja
– każdy obiekt w systemie jest abstrakcyjnym modelem, który może wykonywać zadania, opisywać i zmieniać
swój stan oraz komunikować się z innymi obiektami bez ujawniania, w jaki sposób dane cechy zostały zaimplementowane
●
hermetyzacja -
to sposób odizolowania od otoczenia wybranych danych i funkcji (operujących na tych danych)
zgromadzonych w jednej strukturze. Widoczne są tylko niezbędne fragmenty programu, natomiast zmienne i funkcje
pomocnicze są ukryte i niedostępne z zewnątrz. Dzięki takiemu połączeniu programista uwalnia się od pamiętania o wszystkich
szczegółach implementacyjnych, co zapewnia zmniejszenie liczby błędów oraz prostszą strukturę programu końcowego. Dla

terminu hermetyzacja spotyka się również określenie enkapsulacja. Podobnie jak w innych językach programowania,
hermetyzację można stosować bez klasycznych mechanizmów programowania obiektowego.
●
dziedziczenie -
operacja, która powoduje przeniesienie danych i metod z klasy bazowej do potomnej. Mechanizm ten
uwalnia programistę od ponownego tworzenia i implementowania struktur danych oraz funkcji działających na tych strukturach.
Udostępnia on możliwość korzystania z własnej bądź cudzej pracy jedynie poprzez rozszerzanie już zaimplementowanych
elementów. Nie ma więc konieczności ponownego definiowania tego, co raz już zostało zrobione. Warto pamiętać, że
d
ziedziczenie może dotyczyć rownież interfejsów, gdzie trzeba zachować większą ostrożność w stosowaniu tego mechanizmu.
●
polimorfizm -
to najważniejsza cecha, która umożliwia dostosowanie działania obiektów do własnych oczekiwań poprzez
łączenie funkcjonalności zarówno dziedziczonej, jak i implementowanej samodzielnie. Idea polimorfizmu bazuje na tym, że
użytkownik obiektu nie musi wiedzieć, czy konkretne zachowanie wykorzystywanego obiektu zostało zrealizowane
bezpośrednio w tym obiekcie czy też w tym, po którym dziedziczy on swoje właściwości. Ponadto może się okazać, że takie
samo odwołanie do metody za każdym razem dotyczy innej akcji (inaczej zdefiniowanej). Może się też okazać, że w zależności
od poziomu dziedziczenia pozornie ta sama metoda (nazywa
jąca się tak samo) wykonuje inną akcję.
Programowanie strukturalne zakłada tworzenie procedur i realizacje danego zagadnienie w oparciu o nie. Złożone dane
przechowywane są w postaci struktur a sekwencja wywołań procedur (funkcji) realizuje proces danego zagadnienia. Język
strukturalny nie posiada mechanizmów opisu świata rzeczywistego, z tego powodu nie nadaje się do modelowania
rzeczywistych procesów. Ten sposób programowania nadaje się do tworzenia algorytmów, rzadziej jest wykorzystywany do
modelow
ania zjawisk. Do tego typu zagadnień stosuje się podejście obiektowe. Dzięki mechanizmom polimorfizmu,
dziedziczenia, hermetyzacji w łatwy sposób można modelować zachowania obiektów istniejących w rzeczywistości, same zaś
obiekty reprezentować przy pomocy klas definiujących obiekt, mający określone cechy (własności) czy też zachowania
(metody).
2.
Fala elektromagnetyczna: typy, parametry, właściwości
Promieniowanie elektromagnetyczne (fala elektromagnetyczna)
– rozchodzące się w przestrzeni zaburzenie w postaci pola
elektromagnetycznego.
W fali
rozchodzącej się w próżni lub jednorodnym nieograniczonym ośrodku fala elektromagnetyczna jest falą poprzeczną, w
której składowa elektryczna i magnetyczna są prostopadłe do siebie, a obie są prostopadłe do kierunku rozchodzenia się fali.
Oba pola indukują się wzajemnie – zmieniające się pole elektryczne wytwarza zmieniające się pole magnetyczne, a z kolei
zmieniające się pole magnetyczne wytwarza zmienne pole elektryczne.
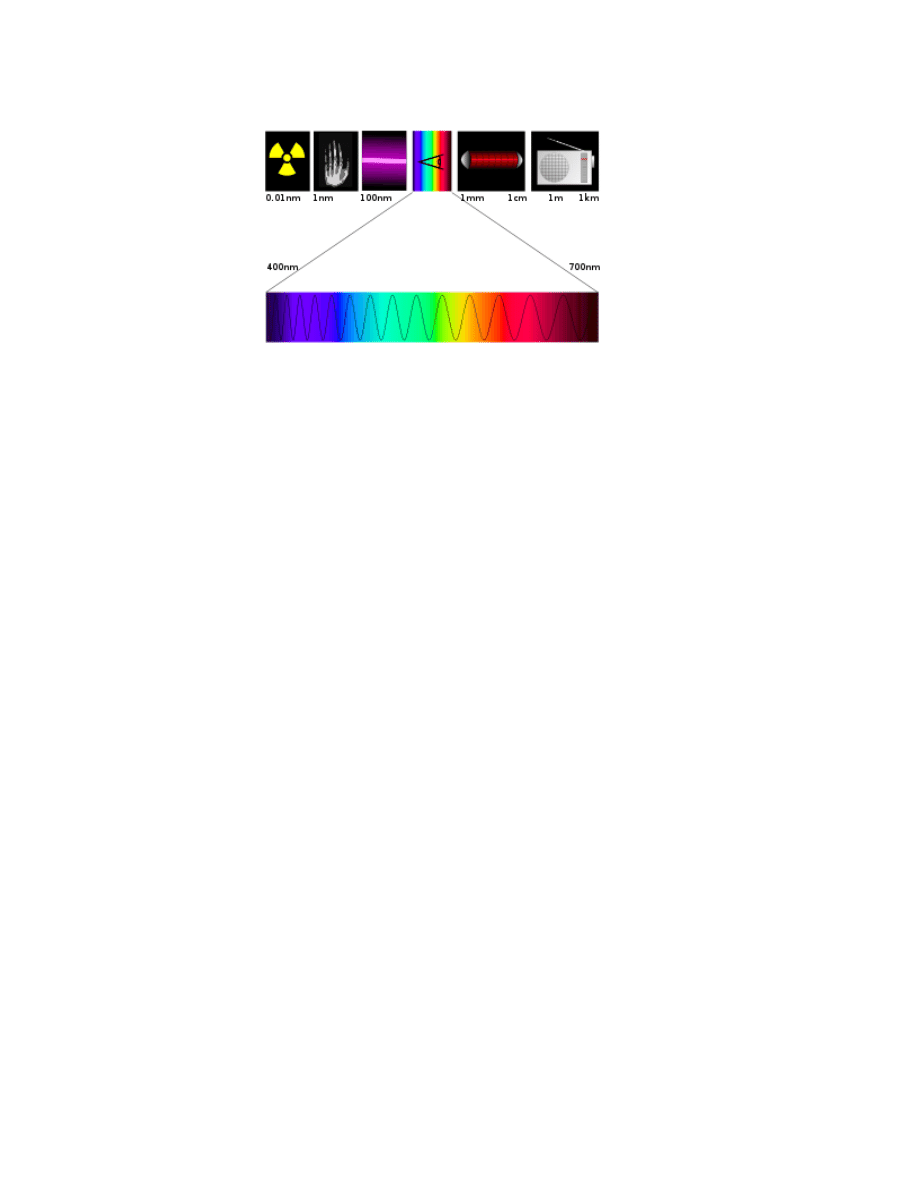
Właściwości fal elektromagnetycznych mocno zależą od długości fali. Promieniowaniem elektromagnetycznym o różnej długości
fali, są fale radiowe, mikrofale, podczerwień, światło, ultrafiolet, promieniowanie rentgenowskie i promieniowanie gamma.
W opisie kwantowym
promieniowanie elektromagnetyczne jest traktowane jako strumień nie posiadających masy cząstek
elementarnych zwanych fotonami
, których energia zależy od długości fali.
Właściwości promieniowania elektromagnetycznego
Widmo fal elektromagnetycznych
Promieniowanie elektromagnetyczne demonstruje swe właściwości falowe zachowując się jak każda fala, ulegając interferencji,
dyfrakcji
, spełnia prawo odbicia i załamania. W wyniku superpozycji fal elektromagnetycznych może powstać fala stojąca.
Jednak niektóre właściwości promieniowania elektromagnetycznego (szczególnie jego oddziaływanie z materią) zależą od
długości fali (częstotliwości promieniowania) i dlatego dokonano podziału promieniowania elektromagnetycznego na zakresy ze
względu na jego częstotliwość. Granice poszczególnych zakresów są umowne i nieostre. Należy je traktować szacunkowo,
promieniowanie o tej samej długości może być nazywane falą radiową lub mikrofalą - w zależności od kontekstu. Granice
promieniowania gamma i pro
mieniowania rentgenowskiego często rozróżnia się z kolei ze względu na źródło tego
promieniowania. Najdokładniej określone są granice dla światła widzialnego, gdyż są one zdeterminowane fizjologią ludzkiego
oka.
Fale radiowe
Fale radiowe znajdują bardzo szerokie zastosowanie w telekomunikacji, radiofonii, telewizji, radioastronomii i wielu innych
dziedzinach nauki i techniki. W technice podstawowym źródłem fal radiowych są anteny zasilane prądem przemiennym
odpowiedniej częstotliwości. Wiele urządzeń generuje też zakłócenia będące falami radiowymi, wymienić tu można na przykład:
zasilacze impulsowe, falowniki i regulatory tyrystorowe, piece indukcyjne
, spawarki, zapłon iskrowy silników samochodowych,
iskrzące styki urządzeń elektrycznych. Naturalne źródła fal radiowych to między innymi wyładowania atmosferyczne, zorze
polarne, radiogalaktyka.
Mikrofale
W zależności od metody wytwarzania niekiedy mikrofale są zaliczane do fal radiowych, albo do podczerwieni.Podstawowe
zastosowania mikrofal to łączność (na przykład telefonia komórkowa, radiolinie, bezprzewodowe sieci komputerowe) oraz
technika radarowa. Za
kres mikrofalowy jest również używany w radioastronomii, a odkrycie mikrofalowego promieniowania tła
miało ważne znaczenie dla rozwoju i weryfikacji modeli kosmologicznych. Wiele dielektryków mocno absorbuje mikrofale, co
powoduje ich rozgrzewanie i jest wykorzystywane w kuchenkach mikrofalowych i w medycynie.
Podczerwień
Promieniowanie podczerwone jest nazywane również cieplnym, szczególnie w kontekście gdy jego źródłem są nagrzane ciała.
Każde ciało o temperaturze większej od zera bezwzględnego emituje takie promieniowanie, a ciała o temperaturze pokojowej
najwięcej promieniowania emitują w zakresie długości fali rzędu 10 μm. Przedmioty o wyższej temperaturze emitują
promieniowanie o większym natężenie i mniejszej długości, co pozwala na pomiar ich temperatury i obserwację za pomocą
urządzeń rejestrujących wysyłane promieniowanie.
Technika rejestracji promieniowania podczerwonego emitowanego przez obiekty o temperaturach spotykanych w codziennych
warunkach to Termowizja.
Światło widzialne
400-700 nm

Ultrafiolet
Promieniowanie ultrafioletowe, jest zaliczane do promieniowania
jonizującego, czyli ma zdolność odrywania elektronów od
atomów i cząsteczek. W dużym stopniu określa to jego właściwości, szczególnie oddziaływanie z materią i na organizmy żywe.
Słońce emituje ultrafiolet w szerokim zakresie spektralnym, ale górne warstwy atmosfery ziemskiej (warstwa ozonowa)
pochłaniają większość promieniowania z krótkofalowej części spektrum. Obserwacje astronomiczne w ultrafiolecie rozwinęły się
dopiero po wyniesieniu ponad atmosferę przyrządów astronomicznych. W technice ultrafiolet stosowany jest powszechnie.
Powoduje świecenie (fluorescencję) wielu substancji chemicznych. W świetlówkach ultrafiolet wytworzony na skutek
wyładowania jarzeniowego pobudza luminofor do świecenia w zakresie widzialnym. Zjawisko to wykorzystuje się również do
zabezpieczania banknotów i w analizie chemicznej (Spektroskopia UV). Ultrafiolet o małej długości fali jest wykorzystywany do
sterylizacji
(wyjaławiania) pomieszczeń.
Promieniowanie rentgenowskie
Promieniowanie rentgenowskie jest promieniowaniem jonizującym. Technicznie promieniowanie rentgenowskie uzyskuje się
przeważnie poprzez wyhamowywanie rozpędzonych cząstek naładowanych. W lampach rentgenowskich są to rozpędzone za
pomocą wysokiego napięcia elektrony hamowane na metalowych anodach. Źródłem wysokoenergetycznego promieniowania
rentgenowskiego są również przyspieszane w akceleratorach cząstki naładowane. Promieniowanie rentgenowskie jest
wykorzystywane do wykonywania
zdjęć rentgenowskich do celów defektoskopii i diagnostyki medycznej.
Promieniowanie gamma
Promieniowania gamma jest promieniowaniem jonizującym. Promieniowanie gamma towarzyszy reakcjom jądrowym, powstaje
w wyniku anihilacji
– zderzenie cząstki i antycząstki, oraz rozpadów cząstek elementarnych. Otrzymywane w cyklotronach
promieniowanie hamowania i synchrotronowe również leży w zakresie długości fali promieniowania gamma, choć niekiedy bywa
nazywane wysokoenergetycznym promieniowaniem rentgenowskim. Promienie gamma mogą służyć do sterylizacji żywności i
sprzętu medycznego. W medycynie używa się ich w radioterapii oraz w diagnostyce. Zastosowanie w przemyśle obejmują
badania defektoskopowe.
Mod fali elektromagnetycznej
Mody fali elektromagnetycznej
są to charakterystyczne rozkłady pola elektromagnetycznego w propagującej fali.
Najprostszym w opisie matematycznym modem fali elektromagnetycznej jest poprzeczn
a fala płaska, w której składowa
elektryczna i magnetyczna są prostopadłe do siebie, a obie są prostopadłe do kierunku rozchodzenia się fali. Ze źródła
punktowego rozchodzą się fale kuliste. Zależności między kierunkami pola elektrycznego, magnetycznego i propagacji oraz
relacje fazowe w fali kulistej pozostają takie same, jak w fali płaskiej. Każdą falę rozchodzącą się w nieskończonym bezstratnym
ośrodku dielektrycznym, niezbyt blisko źródła, można uważać za kulistą, a dostatecznie mały jej wycinek za płaską.
Promieniowanie laserów często ma gaussowski profil wiązki, charakteryzujący się rozkładem amplitudy natężenia pola
elektrycznego w płaszczyźnie prostopadłej do osi wiązki opisanym funkcją Gaussa.
Ogólnie wszystkie mody fali elektromagnetycznej można je podzielić na:
§ falę poprzeczną (TEM od ang. Transverse ElectroMagnetic) - wektory natężenia pola elektrycznego i indukcji pola
magnetycznego są prostopadłe do kierunku rozchodzenia się fali;
§ TE (ang. Transverse Electric) - mody, dla których wektor natężenia pola elektrycznego jest prostopadły do kierunku
rozchodzenia się fali, a wektor indukcji pola magnetycznego nie;
§ TM (ang. Transverse Magnetic) - mody, dla których wektor indukcji pola magnetycznego jest prostopadły do kierunku
rozchodzenia się fali, a wektor natężenia pola elektrycznego nie;
§ mody hybrydowe - mody nie będące żadnym z powyższych - zarówno pole elektryczne, jak i magnetyczne mają niezerowe
składowe w kierunku ruchu.
Polaryzacja fali elektromagnetycznej
Polaryzacja fali elektromagnetycznej to charakterystyczne zachowanie się kierunków wektorów pola elektrycznego i
magnet
ycznego. Obecnie zwyczajowo przyjęto, że polaryzację fali elektromagnetycznej określa się dla jej składowej
elektrycznej (składowa magnetyczna jest do niej prostopadła).
§ Polaryzacja jest liniowa, jeżeli kierunek wektora natężenia pola elektrycznego znajduje się cały czas w jednej płaszczyźnie, w
kierunku prostopadłym do kierunku rozchodzenia się fali.
§ Przy polaryzacji kołowej pole elektryczne określane wzdłuż kierunku ruchu fali ma zawsze taką samą wartość, a jego
kierunek się zmienia w taki sposób, że koniec wektora opisującego zaburzenie zatacza okrąg w czasie jednego okresu fali.
§ Przy polaryzacji eliptycznej natężenie pola elektrycznego określane wzdłuż kierunku ruchu fali ma zawsze wartość i kierunek
taki, że koniec jego wektora zatacza elipsę.
§ Istnieją bardziej złożone typy polaryzacji.
Energia fali elektromagnetycznej
W fali elektromagnetycznej jej pola elektryczne i magnetyczne niosą ze sobą energię. W próżni i jednorodnym idealnym
dielektryku składowe elektryczne i magnetyczne niesionej energii są sobie równe, natomiast w ośrodku o niezerowym
przewodnictwie elektrycznym są różne.
Strumień energii przenoszonej przez falę elektromagnetyczną w każdym punkcie przestrzeni określa wektor Poyntinga
zdefiniowany jako
μ0 - przenikalność magnetyczna próżni
-
natężenie pola elektrycznego
- indukcja pola magnetycznego.
Prędkość fali elektromagnetycznej
Prędkość rozchodzenia się fali elektromagnetycznej w próżni jest stała, nie zależy od jej częstości ani układu odniesienia.
Nazywa się ją prędkością światła. Jest ważną stałą fizyczną, a jej wartość wynosi około
. W ośrodkach
materialnych prędkość fali elektromagnetycznej jest zawsze mniejsza niż w próżni.
Oddziaływanie fali elektromagnetycznej z materią
Rozchodzenie się fali w ośrodkach zależy od zarówno od właściwości tych ośrodków, jak i częstotliwości fali.
§ Gdy długość fali duża w porównaniu z odległościami między cząsteczkami ośrodka może on być traktowany jako ciągły. Gdy
jest dielektrykiem, fala się w nim rozchodzi, a zmienia się jej prędkość i długość. W ośrodkach przewodzących rozchodząca się
fala jest tłumiona, tym bardziej, im większe jest ich przewodnictwo. Również straty dielektryczne powodują tłumienie fali. W
dobre przewodniki (metale) fale o tej długości wnikają jedynie na niewielką głębokość, natomiast odbijają się.
§ Gdy długość fali staje się porównywalna z odległościami międzyatomowymi (rzędu nm - promieniowanie rentgenowskie)
zaczynają przeważać efekty dyfrakcyjne.
§ Gdy długość fali jest się małe w porównaniu z odległościami międzyatomowymi promieniowanie nazywa się przenikliwym,
gdyż ma dużą zdolność penetracji materii. Kwanty promieniowania o małej długości mają jednak tak dużą energię, że mogą
jonizować atomy i rozbijać cząsteczki.
§ W dużym stopniu pochłaniane są również kwanty promieniowania o energii odpowiadającej różnicy poziomów
energetycznych
elektronów i cząsteczek w materiale (pochłanianie rezonansowe).
Opis teoretyczny
Równania Maxwella w przestrzeni nie zawierającej ładunków (w próżni) można zapisać jako:
gdzie
H
– wektor natężenia pola magnetycznego,
E
Równania te są liniowymi równaniami różniczkowymi fali rozchodzącej się z prędkością
gdzie:
ε to przenikalność elektryczna, a μ to przenikalność magnetyczna ośrodka, w którym rozchodzi się fala. W próżni
prędkość ta jest prędkością światła w próżni i określa ją wzór:
3. Tranzystory bipolarne i unipolarne: budowa, właściwości i zastosowania.
Tranzystory bipolarne
Wiadomości podstawowe
Tranzystory są urządzeniami półprzewodnikowymi umożliwiającymi sterowanie przepływem dużego prądu, za pomocą prądu
znacznie mniejszego. Wykorzystuje się je do wzmacniania małych sygnałów oraz przetwarzania informacji w postaci cyfrowej.
Nazwa "tranzystor" pochodzi z połączenia słów transfer i rezystor.
Pierwszy tranzystor bipolarny zbudował rok później inny amerykański fizyk - W.B. Shockley. Cała ta trójka za wynalezienie
tranzystora otrzymała w 1956 roku Nagrodę Nobla.
Nazwa bipolarne dotyczy tranzystorów, w których transport ładunków odbywa się za pośrednictwem obu rodzajów nośników
jakie istnieją w półprzewodniku, tzn. elektronów i dziur. Półprzewodniki, w których na skutek nieregularności sieci krystalicznej
przeważają nośniki typu dziurowego nazywa się półprzewodnikami typu p (niedomiarowymi), gdy przeważają nośniki
elektronowe nazywa się je półprzewodnikami typu n (nadmiarowymi).
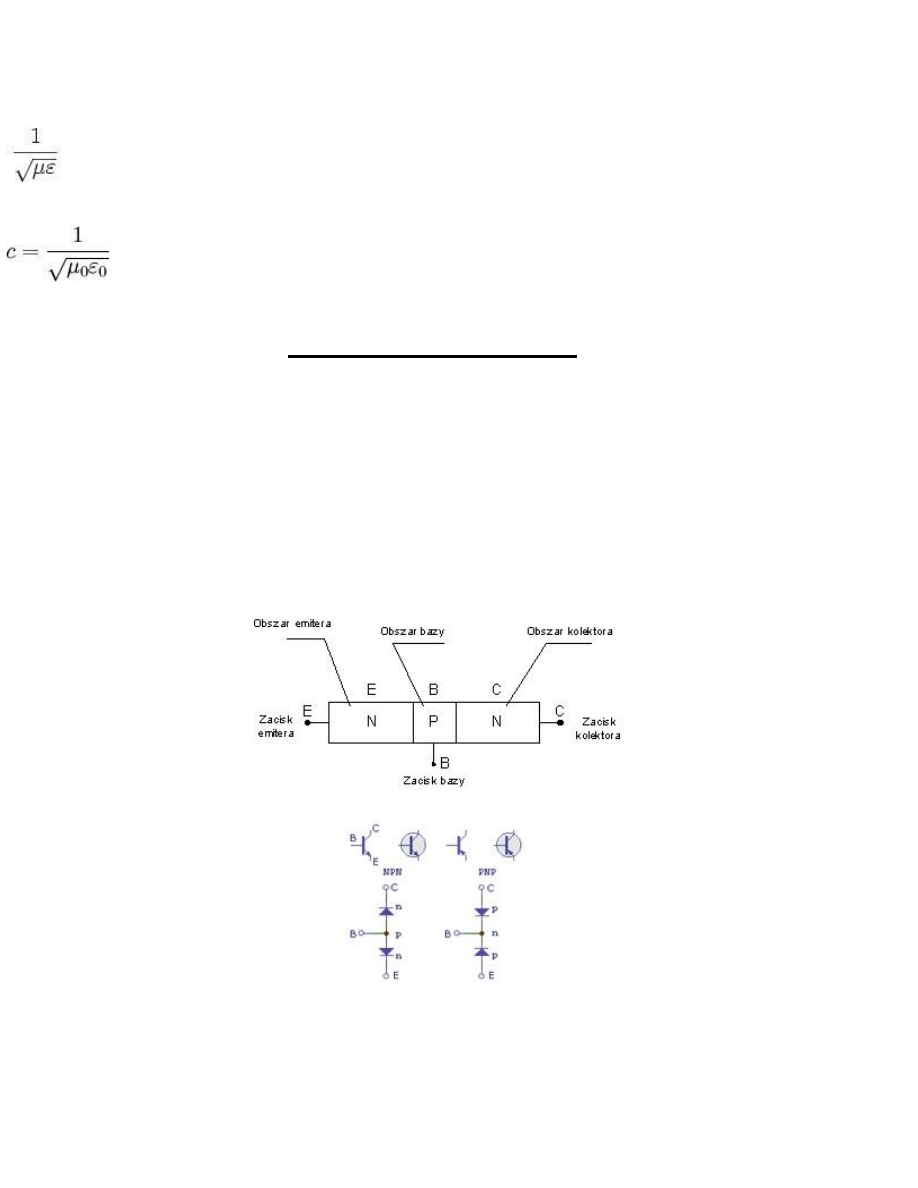
Tranzystor bipolarny składa się z trzech obszarów półprzewodnika o przeciwnym typie przewodnictwa, co powoduje powstanie
dwóch złączy: p-n i n-p.
Istnieją dwie możliwe konfiguracje złączy p-n i n-p prowadzące do powstania dwóch rodzajów tranzystorów bipolarnych.
Zasada działania
Zasada działania tranzystora bipolarnego omówiona zostanie na podstawie tranzystora NPN:
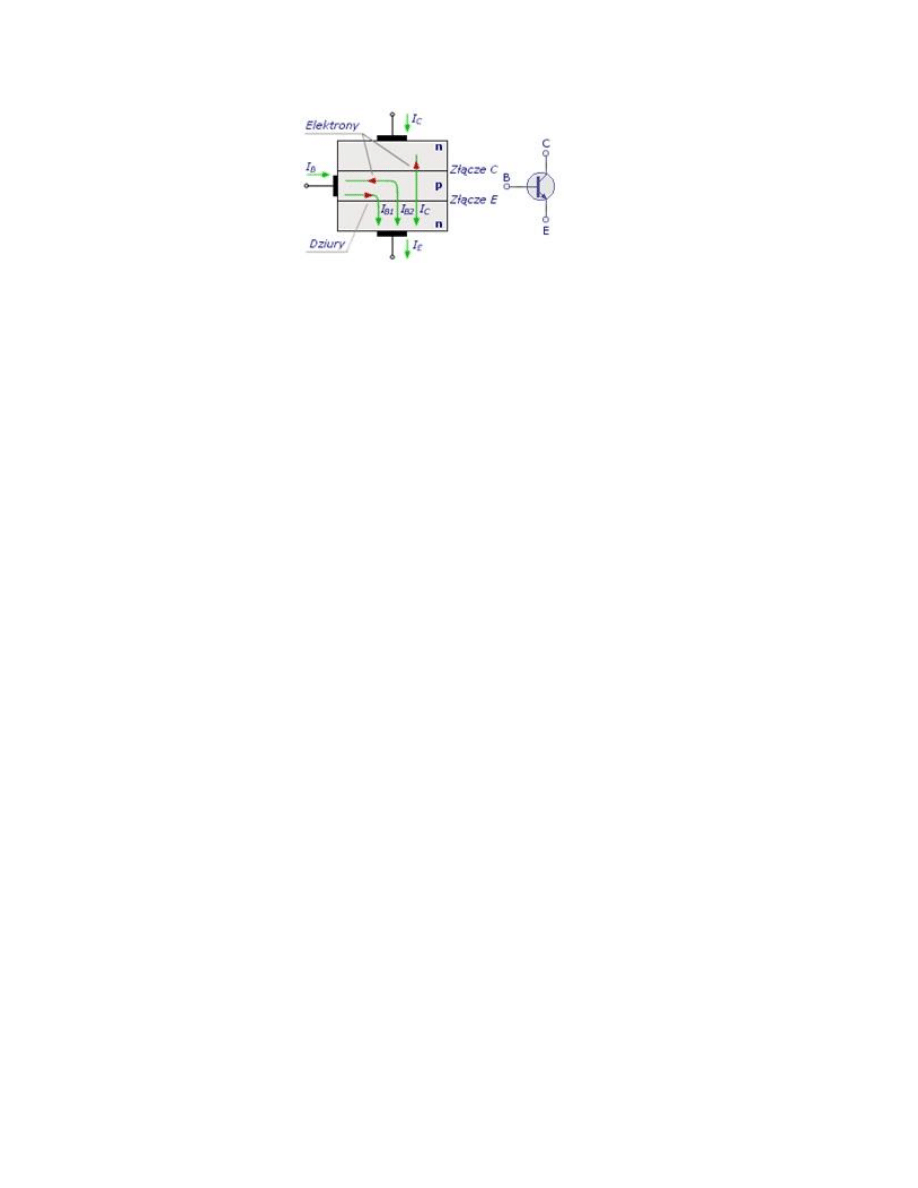
Przez złącze BE tranzystora npn przepływają nośniki większościowe ładunku, w tym przede wszystkim elektrony swobodne z
emitera (typ n) do bazy. Również dziury z obszaru bazy (typ p) przepływają przez złącze do emitera. Prąd dziurowy jest
znacznie mniejszy ze względu na mniejszą liczbę dziur, wynikającą z mniejszej objętości emitera. Mniejsza część elektronów
swobodnych po osiągnięciu obszaru bazy wypełnia istniejące tam dziury, czyli podlega procesowi rekombinacji. Znacznie
większa część elektronów swobodnych po znalezieniu się w obszarze bazy jest przyciągana przez kolektor i przepływa przez
złącze BC spolaryzowane zaporowo, tak jak własne nośniki mniejszościowe bazy. Wypływające z emitera elektrony swobodne
tworzą prąd emitera IE, który rozdziela się w obszarze bazy na mały prąd bazy IB i duży prąd kolektora IC.
Podstawowe parametry tranzystora
Bardzo ważnym jest aby strata elektronów w bazie była jak najmniejsza. Miarą tego na ile prąd kolektora odpowiada prądowi
emitera jest współczynnik a nazywany zwarciowym współczynnikiem wzmocnienia prądowego prądu emitera (współczynnik
wzmocnienia prądowego tranzystora w układzie WB), definiowany jako:
alfa = (I
C
-I
C0
)/I
E
gdzie I
C0
jest prądem złącza kolektorowego spolaryzowanego zaporowo przy I
B
=0.
Konstrukcja tranzystora bipolarnego, a głównie małe rozmiary bazy sprawiają, że stosunek między prądem kolektora, a
prądem bazy jest stały. Stosunek I
C
/ I
B
nazywa się współczynnikiem wzmocnienia prądowego prądu bazy (współczynnik
wzmocnienia prądowego tranzystora w układzie WE) i oznacza się symbolem beta.
IE = IC + IB
IC = beta * IB
Zależność pomiędzy obydwoma współczynnikami opisuje równanie:
beta = alfa / (1-alfa)
Stały stosunek IC/ IB oznacza, ze pewnej wartości prądu bazy IB odpowiada określona wartość prądu kolektora IC. Można
zatem zmieniać prąd bazy po to aby uzyskiwać b-krotnie większe zmiany prądu kolektora. Uzyskuje się zatem wzmocnienie
przez tranzystor mocy sygnału sterującego. Większą moc sygnału w obwodzie kolektora otrzymuje się kosztem mocy czerpanej
z zasilacza.
Dla sygnałów zmiennoprądowych o małych amplitudach tranzystor jest czwórnikiem liniowym. Czwórnik opisywany jest za
pomocą czterech wielkości wyrażających napięcia i prądy na jego wejściu i wyjściu. Aby móc opisać go za pomocą układu
równań dwóch zmiennych należy dwie z czterech wielkości czwórnika opisać za pomocą dwóch pozostałych. W zależności od
tego, które ze zmiennych uznane zostaną za zmienne zależne, a które za zmienne niezależne otrzymać można 6 różnych
układów równań. Najczęściej wykorzystywane są jednak układy z parametrami:
a) impedancyjnymi:
U1 = z11I1 + z12I2
U2 = z21I1 + z22I2
b) admitancyjnymi:
I1 = y11U1 + y12U2
I2 = y21U1 + y22U2
c) mieszanymi
h (układ z parametrami hybrydowymi):
U1 = h11I1 + h12U2
I2 = h21I1 + h22U2
Tranzystory, tak zresztą jak inne elementy elektroniczne, mają charakterystyczne dla siebie parametry graniczne, tzn. takie
których przekroczenie grozi uszkodzeniem tranzystora. Są to:
UEBOmax -
dopuszczalne napięcie wsteczne baza-emiter
UCBOmax -
dopuszczalne napięcie wsteczne kolektor-baza
UCEOmax -
maksymalne dopuszczalne napięcie kolektor-emiter
Icmax -
maksymalny prąd kolektora
IBmax -
maksymalny prąd bazy
Pstmax - maksymalna dopuszczalna moc strat
Parametry takie jak Icmax, UCEOmax, Pstrmax wyznaczają dopuszczalny obszar pracy, który nosi również nazwę
"dozwolonego obszaru pracy aktywnej" w skrócie SOA (Safe Operating Area).
Parametry tranzystorów bipolarnych w znacznym stopniu zależą również od temperatury. Prąd zerowy ICBO jest w
przybliżeniu wykładniczą funkcji temperatury i przy jej wzroście o 10K w przybliżeniu podwaja swoją wartość. Tranzystory
krzemowe -
ze względu na małą wartość ICBO - mogą być stosowane aż do temperatury ok. 473 K (200 C). Współczynnik
wzmocnienia prądowego wzrasta na ogół ze wzrostem temperatury. Wzrost ten jest rzędu kilku procent na stopień kelwina. Przy
stałej wartości prądu bazy, napięcie baza-emiter UBE za wzrostem temperatury maleje.
Sposoby polaryzacji tranzystora
Tranzystor składa się z dwóch złączy PN, które mogą być spolaryzowane w kierunku zaporowym lub przewodzenia. W związku
z tym można wyróżnić cztery stany pracy tranzystora.
Stan tranzystora
Kierunki polaryzacji złączy tranzystora
Złącze emiter-baza
Złącze kolektor-baza
Zatkanie
Zaporowy
Zaporowy
Przewodzenie aktywne
Przewodzenia
Zaporowy
Nasycenie
Przewodzenia
Przewodzenia
Przewodzenie inwersyjne
Zaporowy
Przewodzenia
Najważniejszym z tych nich jest obszar pracy aktywnej, gdyż to właśnie w tym obszarze tranzystor wykazuje swoje
właściwości wzmacniające, które są wykorzystywane praktycznie.
Układy pracy tranzystora
Tranzystor jako element trójkońcówkowy, czyli trójnik może być połączony w układzie elektronicznym w rozmaity sposób. W
matematycznym opisie tranzystora -
trójnika - traktuje się go zwykle jako czwórnik, przyjmując jedną z końcówek jako wspólną
dla wejścia i wyjścia. W zależności od tego, którą z końcówek wybieramy za wspólną, rozróżnia się konfiguracje:
1. Układ ze wspólnym emiterem OE (WE)
2. Układ ze wspólną bazą OB. (WB)
3. Układ ze wspólnym kolektorem OC (WC)
Wybór układu pracy jest zależny od przeznaczenia i rodzaju zastosowanego tranzystora.
Tranzystor pracujący w układzie OE jest najczęściej używany w układach elektronicznych ponieważ charakteryzuje się:
-
dużym wzmocnieniem prądowym
-
dużym wzmocnieniem napięciowym
-
dużym wzmocnieniem mocy
Napięcie wejściowe w OE jest odwrócone w fazie o 180 st. W stosunku do napięcia wejściowego. Rezystancja wejściowa jest
rzędu kilkuset W, a wyjściowa wynosi kilkadziesiąt k W.
Tranzystor pracujący w układzie OB. ma:
-
małą rezystancję wejściową
-
bardzo dużą rezystancje wyjściową
-
wzmocnienie prądowe bliskie jedności
Tra
nzystor w tym układzie pracuje przy bardzo dużych częstotliwościach granicznych, niekiedy nawet rzędu GHz.
Tranzystor pracujący w układzie OC charakteryzuje się:
-
dużą rezystancją wejściową (co ma istotne znaczenie we wzmacniaczach małej częstotliwości)
-
wzmocnieniem napięciowym równym jedności (stąd jest nazywany również wtórnikiem emiterowym)
-
dużym wzmocnieniem prądowym
Zastosowania
Znaczenie tranzystorów dla obecnej techniki jest olbrzymie, o czym świadczy chociażby fakt, iż od ponad pół wieku nikomu nie
udało się zrealizować innego elementu elektronicznego, który miałby tak szerokie zastosowanie. Tranzystory są używane
wszędzie, od najprostszego wzmacniacza lub generatora do najbardziej skomplikowanego komputera. Procesory tych urządzeń
zawiera
ją w sobie miliony tranzystorów. Warto też podkreślić, że pierwszy komputer, może bardziej maszyna licząca, został
zrealizowany na lampach elektronowych, które były pierwowzorami tranzystorów. Cechowały się podobnymi parametrami, ale
były bardziej zawodne niż obecne tranzystory, choć miały lepsze charakterystyki przenoszenia. Obecnie producenci, którzy
zajmują się sprzętem audio ( przede wszystkim chodzi o wzmacniacze gitarowe) wracają do lamp i ponownie konstruują piece
gitarowe na lampach elektronowych.
Tranzystory polowe
Wiadomości podstawowe
Tranzystory polowe w skrócie FET (Field Effect Transistor), są również nazywane unipolarnymi. Działanie tych tranzystorów
polega na sterowanym transporcie jednego rodzaju nośników, czyli albo elektronów albo dziur. Sterowanie transportem tych
nośników, odbywającym się w części tranzystora zwanej kanałem, odbywa się za pośrednictwem zmian pola elektrycznego
przyłożonego do elektrody zwanej bramką.
Bramka jest odizolowana od kanału, a więc pomięidzy nią a pozostałymi elektrodami tranzystora polowego, znajdującymi się
na obu końcach kanału (zwanych źródłem oraz drenem) występuje bardzo duża impedencją.
Tranzystory polowe zajęły obecnie miejsce tranzystorów bipolarnych, zalicza się je do najczęściej stosowanych elementów
dyskretnych. Rewelacyjne efekty można uzyskać, stosując tranzystory polowe w połączeniu z obwodami scalonymi, zarówno
dla niskich jak i wysokich częstotliwości
Klasyfikacja tranzystorów polowych
Istnieją dwie zasadnicze grupy tranzystorów polowych, różniących się sposobem odizolowania bramki od kanału. Pierwsza to
tranzystory polowe złączowe zwane także tranzystorami JFET, w których oddzielenie bramki od kanału jest wykonane za
pośrednictwem zaporowo spolaryzowanego złącza p-n. W drugiej grupie tranzystorów polowych bramka jest odizolowana od
kanału cienką warstwą izolatora, którym jest najczęściej dwutlenek krzemu. Tranzystory nazywane są tranzystorami z izolowaną
bramką lub tranzystorami MOSFET.
Tranzystory MOSFET można podzielić dalej w zależności od rodzaju kanału na tranzystory z kanałem wbudowanym (
tranzystory normalnie załączone, tranzystory z kanałem zubożanym) oraz tranzystory z kanałem indukowanym (tranzystory
normalnie wyłączone).
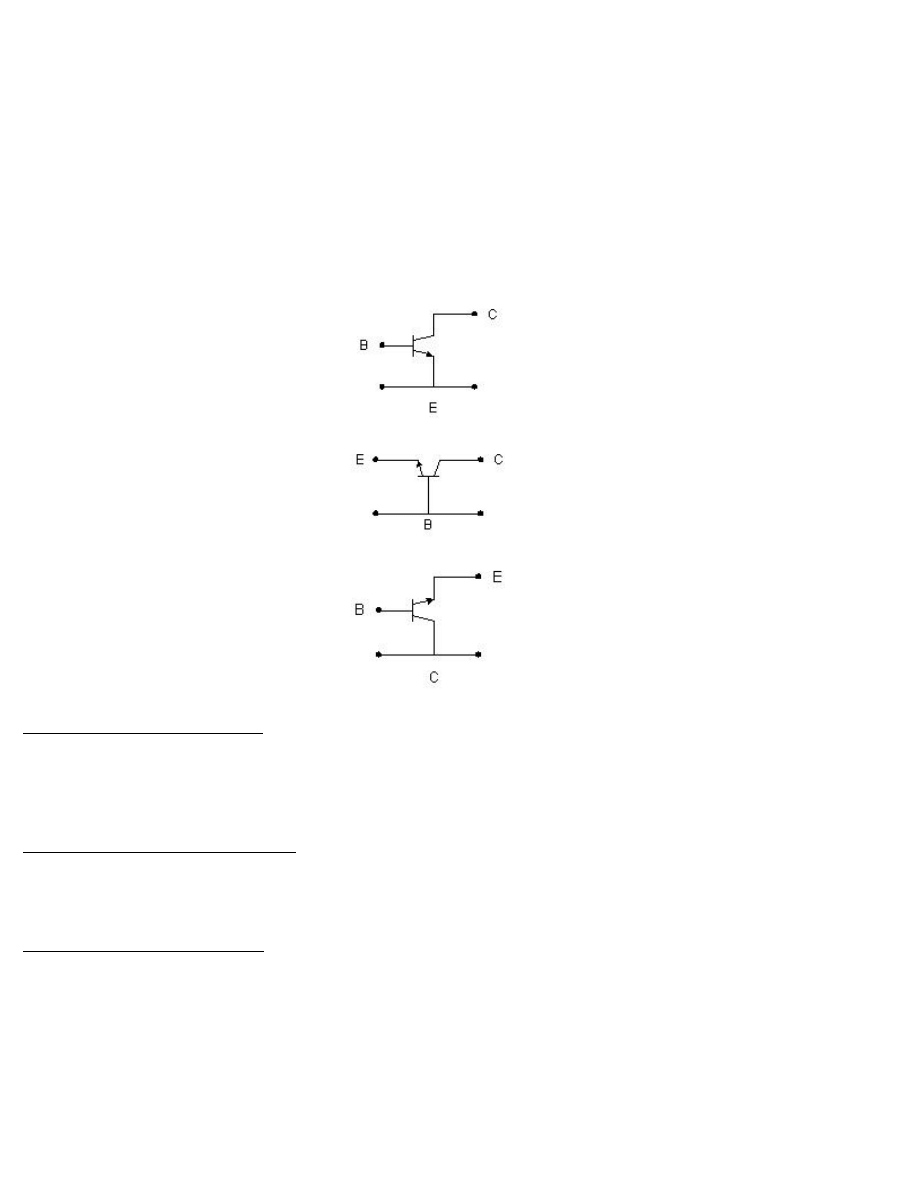
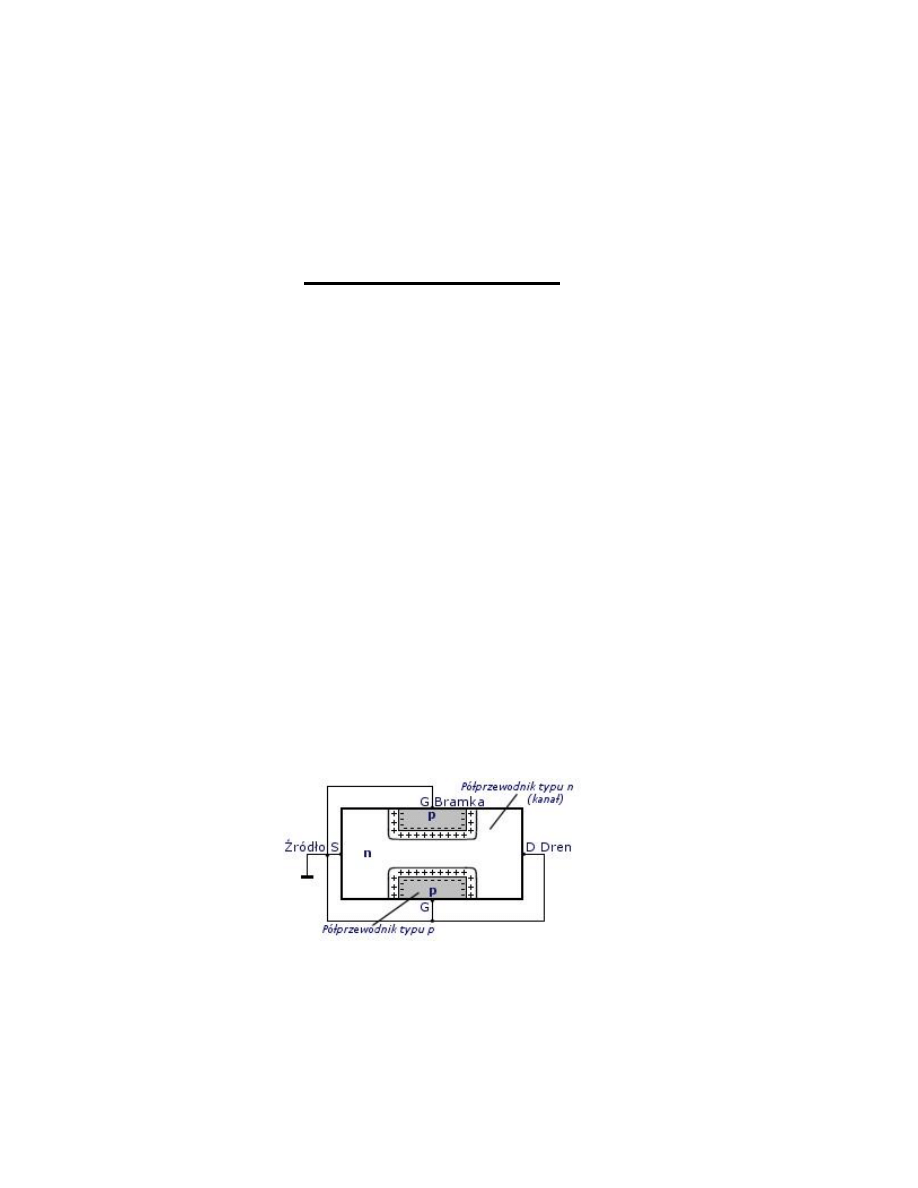
Zasada działania tranzystora JFET
Zasadę działania opisują poniższe rysunki:
Jednorodny obszar półprzewodnika występujący między drenem i źródłem stanowi kanał, przez który płynie prąd i którego
rezystancję można zmieniać przez zmianę szerokości kanału. Zmianę szerokości kanału uzyskuje się przez rozszerzenie lub
zwężenie warstwy zaporowej złącza p-n, a więc przez zmianę napięcia UGS polaryzującego to złącze w kierunku zaporowym.
Dalsze zwiększanie napięcia UGS może spowodować połączenie się warstw zaporowych i zamknięcie kanału.
Rezystancja będzie wówczas bardzo duża.
Można powiedzieć, że tranzystor JFET jest swego rodzaju rezystorem sterowanym napięciow
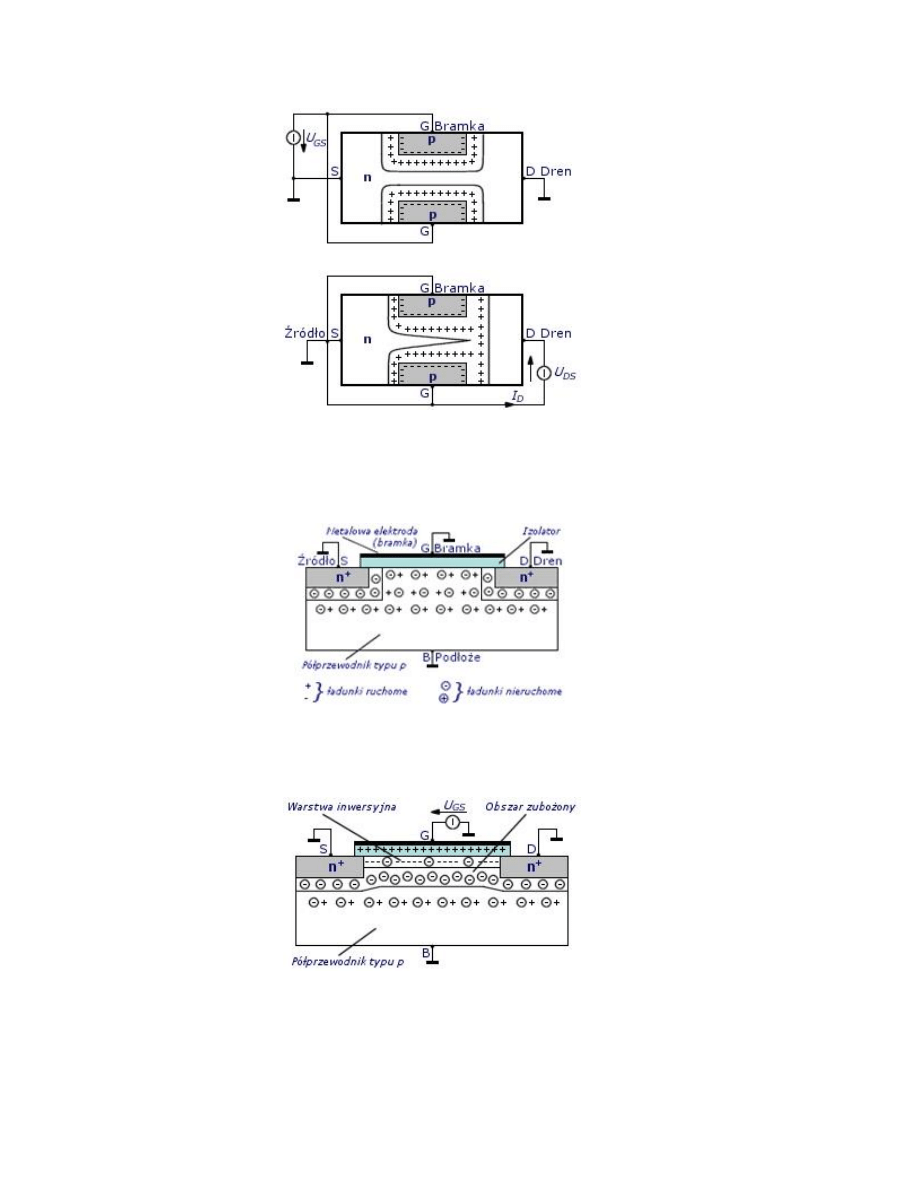
Zasada działania tranzystora MOSFET
Poniżej przedstawiono zasadę działania tranzystora MOSFET z kanałem indukowanym typu n i podłożem typu p.
Na powyższym rysunku przedstawiona jest sytuacja, w której polaryzacja drenu i bramki jest zerowa czyli UDS=0 i UGS=0.
W takiej sytuacji brak jest połączenia elektrycznego pomiędzy drenem i źródłem czyli brak jest kanału. Jeżeli zaczniemy
polaryzować bramkę coraz większym napięciem UGS>0 to po przekroczeniu pewnej wartości tego napięcia, zwanej napięciem
progowym UT, zaistnieje sytuacja przedstawiona na poniższym rysunku.
Dodatni ładunek bramki spowodował powstanie pod jej powierzchnią warstwy inwersyjnej złożonej z elektronów swobodnych
o dużej koncentracji oraz głębiej położonej warstwy ładunku przestrzennego jonów akceptorowych, z której wypchnięte zostały
dziury. Powstaje w ten sposób w warstwie inwersyjnej połączenie elektryczne pomiędzy drenem a źródłem. Przewodność tego
połączenia zależy od koncentracji elektronów w indukowanym kanale, czyli od napięcia UGS. Wielkość prądu płynącego
powstałym kanałem zależy niemalże liniowo od napięcia UDS. Zależność ta nie jest jednak do końca liniowa, ponieważ prąd ten
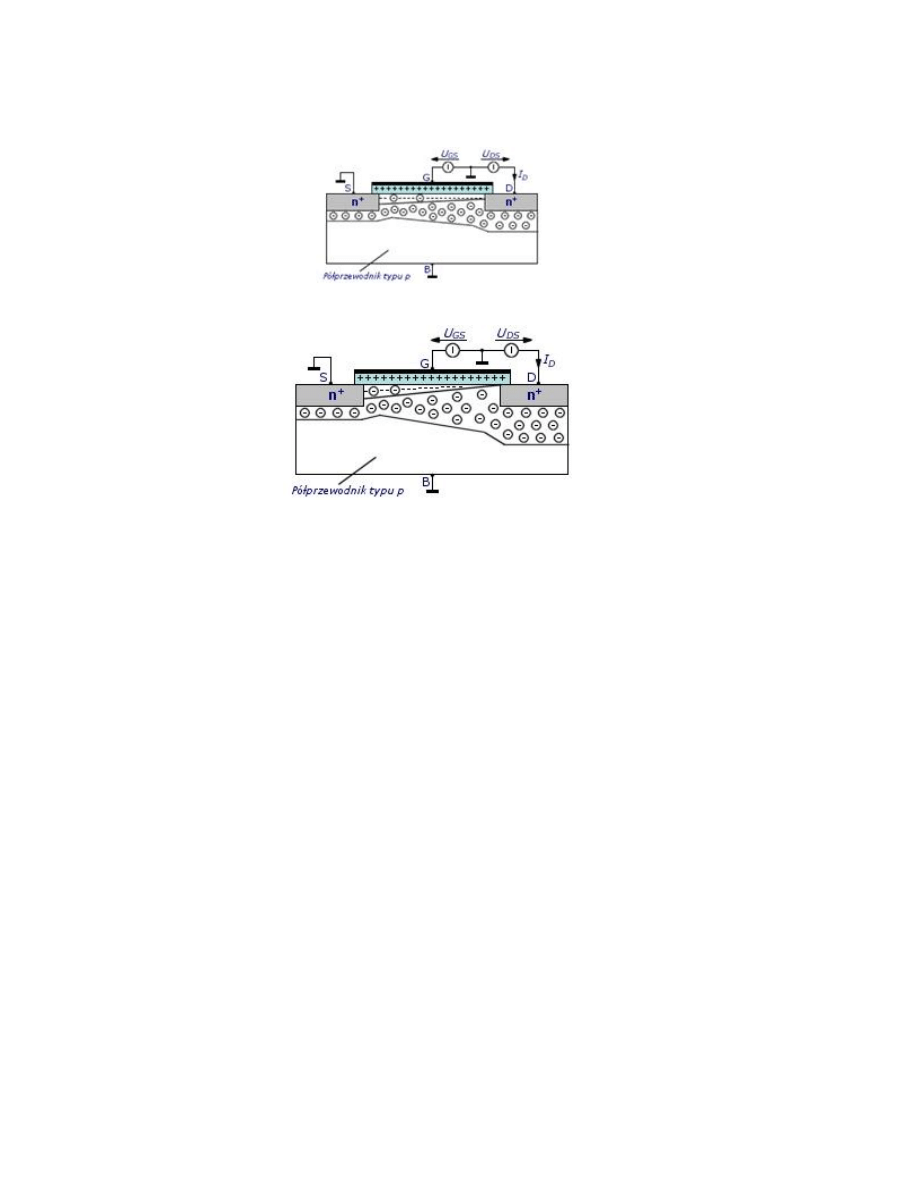
zmienia stan polaryzacji bramki, na skutek czego im bliżej drenu, tym różnica potencjałów pomiędzy bramką i podłożem jest
mniejsza, a kanał płytszy.
Gdy w wyniku dalszego zwiększania napięcia UGS przekroczona zostanie pewna jego wartość zwana napięciem odcięcia
UGSoff, lub wartość napięcia UDS zrówna się z poziomem napięcia UGS (UDS=UGS), powstały kanał całkowicie zniknie.
Można zatem powiedzieć iż dla małych wartości napięcia dren-źródło omawiany tranzystor typu MOSFET stanowi liniowy
rezystor, którego rezystancję można regulować za pomocą napięcia bramka-źródło.
Podstawowe parametry tranzystora oraz parametry różniczkowe gm i gds - ich sens fizyczny
Tranzystory unipolarne opisuje się, między innymi za pomocą następujących parametrów:
●
Napięcie odcięcia bramka-źródło UGS(OFF) , czyli napięcie jakie należy doprowadzić do bramki, aby przy ustalonym
napięciu UDS nie płynął prąd drenu.
●
Napiecie progowe UP -
napięcie jakie należy doprowadzić, aby przez tranzystor popłynął prad
●
Prąd nasycenia IDSS prąd drenu płynący przy napięciu UGS=0 i określonym napięciu UDS.
●
Prąd wyłączenia ID(OFF) - prąd drenu płynący przy spolaryzowaniu bramki napięciem |UGS| > |UGS(OFF)|
●
Rezystancja statyczna włączenia RDS(ON) - rezystancja między drenem a źródłem tranzystora pracującego w zakresie
liniowym charakterystyki ID = f(UDS) przy UGS=0;
●
Resystancja statyczna wyłączenia RDS(OFF) - rezystancja między drenem a źródłem tranzystora znajdującego się w
stanie odcięcia
●
Dopuszczalny prąd drenu IDmax
●
Dopuszczalny prąd bramki IGmax
●
Dopuszczalne napięcie dren-źródło UDSmax
●
Dopuszczalne straty mocy Ptot max
Właściwości wzmacniające tranzystora określa stosunek zmiany prądu ID do zmiany napięcia sterującego UGS nazywany
konduktancją wzajemną (transkonduktancją) gm:
Drugi
ważny parametr tranzystora gds zwany konduktancją drenu lub konduktancją wyjściową.
Wykorzystując wyprowadzone powyżej parametry można przedstawić jeszcze jeden parametr tranzystora zwany
współczynnikiem wzmocnienia napięciowego.
ZASTOSOWANIE TRANZYSTORÓW UNIPOLARNYCH
Tranzystory znajdują szerokie zastosowania w elektryce, elektronice, technice i podobnych dziedzinach. Ze względu na ilość
tych zastosowań przedstawię tylko niektóre wybrane. Wzmacniacze.
-
Wzmacniacz o bezpośrednim sprzężeniu z tranzystorami MOS
Wzmacniacz małej częstotliwości.
Wzmacniacze różnicowe.
Tranzystorowy wzmacniacz różnicowy posiada szereg istotnych zalet jako wzmacniacz małych sygnałów prądu stałego. Po
pierwsze, ze względu na kompensowanie się temperaturowych zmian parametrów pary tranzystorów wpływ temperatury jest
znacznie zmniejszony. Po drugie, sygnały sumacyjne mogą być właściwie wyeliminowane przy starannym zaprojektowaniu
układu.
Wyłączniki analogowe
We współczesnych systemach telemetrii wielokrotnej szeroko stosuje się wyłączniki analogowe dla próbkowania odcinkami
czasu sygnału wejściowego. Jest oczywiste, że takie wyłączniki powinny przenosić informację bez zniekształceń w stanie
„włączony”,, mieć wystarczająco dużą rezystancję w stanie „wyłączony”, by przesłuch był znikomo mały mieć czas wyłączania
rzędu części mikrosekundy.
Zastosowania tranzystora polowego jako rezystora sterowanego napięciem
Taki element jest przydatny do wielu zastosowań, wśród których przykładowo wymienimy następujące:
-
Tłumiki sterowane napięciowo.
-
Mostki z automatycznym równoważeniem.
-
Sterowaniem częstotliwością rezonansową oraz dobrocią filtrów aktywnych i pasywnych.
-
Mnożenie i dzielenie sygnałów analogowych.
-
Regulacja współczynnika sprzężenia zwrotnego we wzmacniaczu lub generatorze.
- S
terownie napięciowe przesuwników fazowych.
łą dziedzinę, to znaczy jest zdefiniowany dla każdej wartości argumentu (najczęściej czasu) w skończonym lub nieskończonym
przedziale.
Modelem deterministycznego sygnału ciągłego je
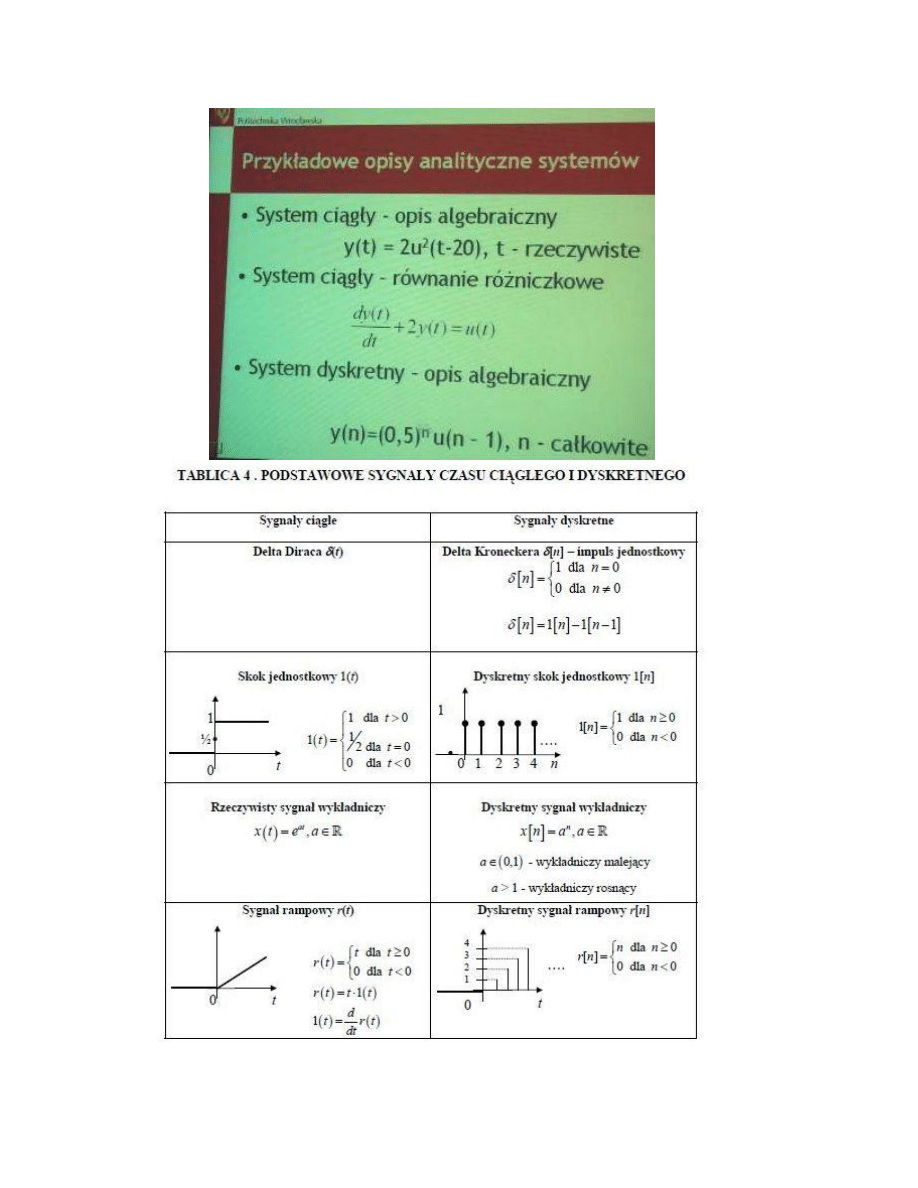
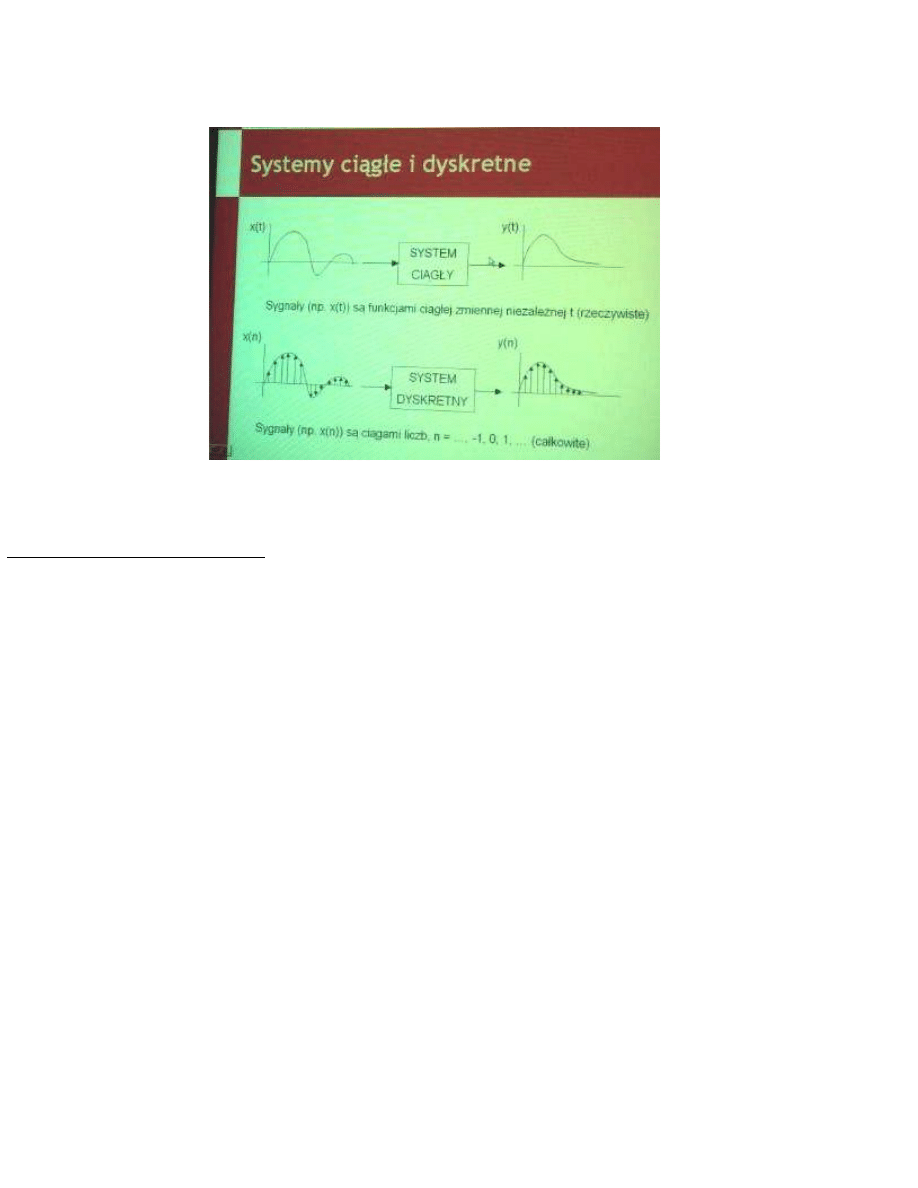
4. Systemy ciągłe i dyskretne: klasyfikacja i opis.
Systemy ciągłe – wszystkie sygnały (wejściowe i wyjściowe) są funkcjami ciągłymi w czasie i mogą przybierać dowolną
wartość z obszaru swojej zmienności. Układy te opisuje się zwykle równaniami różniczkowymi.
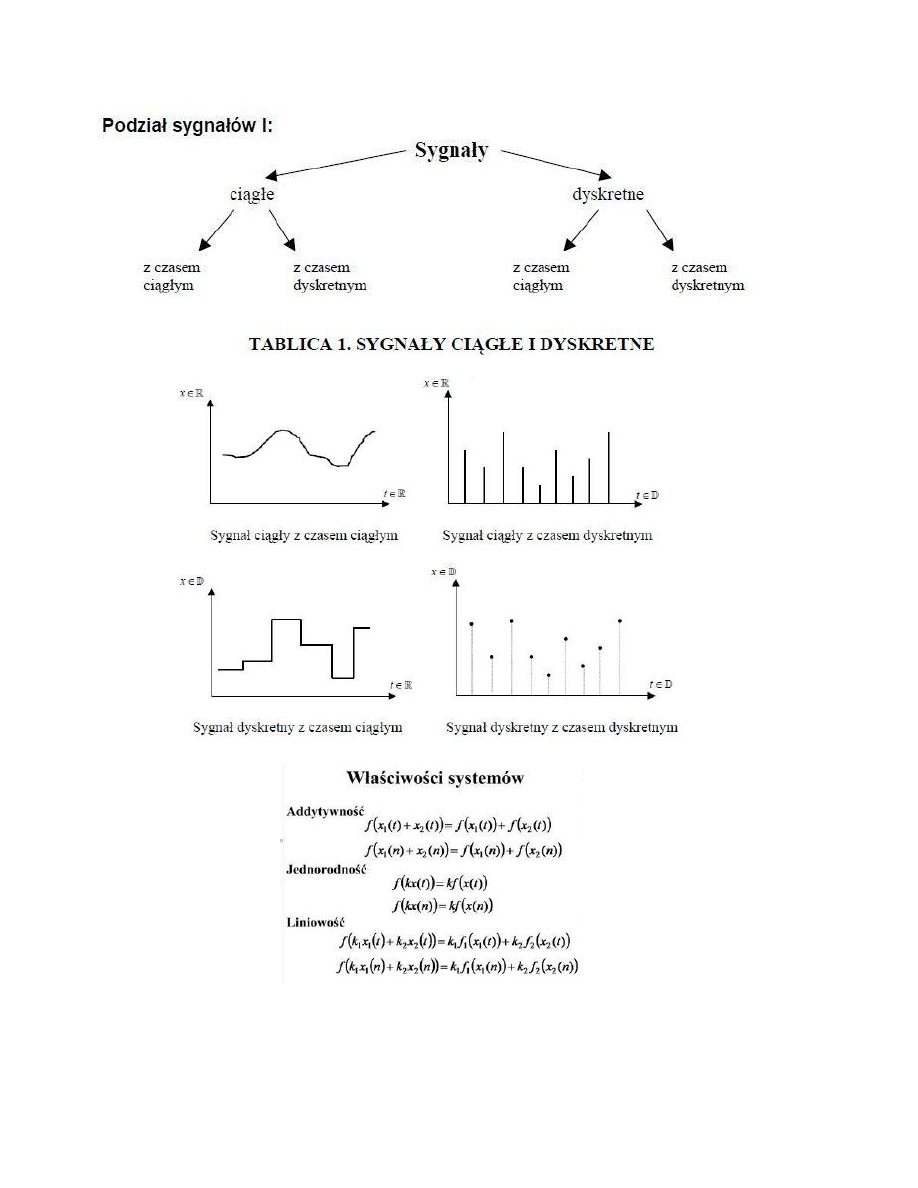
Sygnał ciągły – sygnał, który ma ciągst funkcja określona w danym przedziale argumentu. Uwaga: funkcja ta nie musi być
funkcją ciągłą, w szczególno
ści może posiadać nieskończenie wiele punktów nieciągłości.
Przeciwieństwem sygnału ciągłego jest sygnał dyskretny.
Przykłady:
Przykładem jednowymiarowego sygnału ciągłego jest przebieg zmian napięcia elektrycznego lub natężenia prądu powstały
przez przetworzenie fali akustycznej na prąd.
Przykładem dwuwymiarowego sygnału ciągłego jest obraz analogowy zarejestrowany na kliszy fotograficznej, gdzie odcienie
szarości lub kolor zdefiniowane są dla każdego punktu na płaszczyźnie w granicach wynikających z rozmiaru kliszy.
Sygnał analogowy – sygnał, który może przyjmować dowolną wartość z ciągłego przedziału (nieskończonego lub
ograniczonego
zakresem zmienności). Jego wartości mogą zostać określone w każdej chwili czasu, dzięki funkcji
matematycznej opisującej dany sygnał. Przeciwieństwem sygnału analogowego jest sygnał skwantowany, nazywany również
dyskretnym (w szczególności: cyfrowym).
Systemy dyskretne
– układ jest dyskretny, jeżeli przynajmniej jeden jego sygnał ma charakter dyskretny, tzn. przyjmuje tylko
określone wartości dla określonych argumentów. Układy takie opisuje się zwykle równaniami różnicowymi. Przy przetwarzaniu
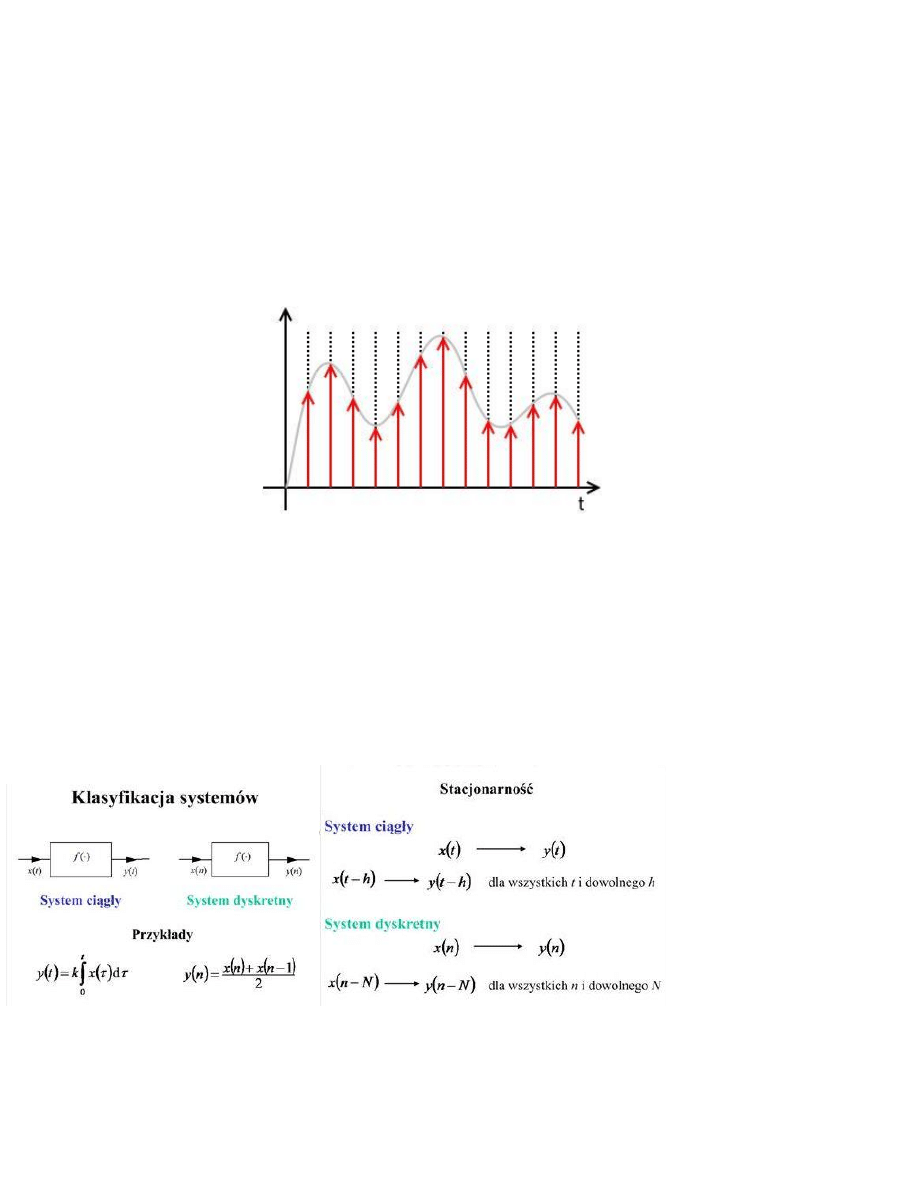
sygnałów ciągłych (analogowych) na dyskretne (cyfrowe) mamy do czynienia z próbkowaniem i kwantyzacją. Przy
przetwarzaniu sygnału dyskretnego na ciągły należy pamiętać o Twierdzeniu Kotielnikowa-Shannona i warunku Nyquista.
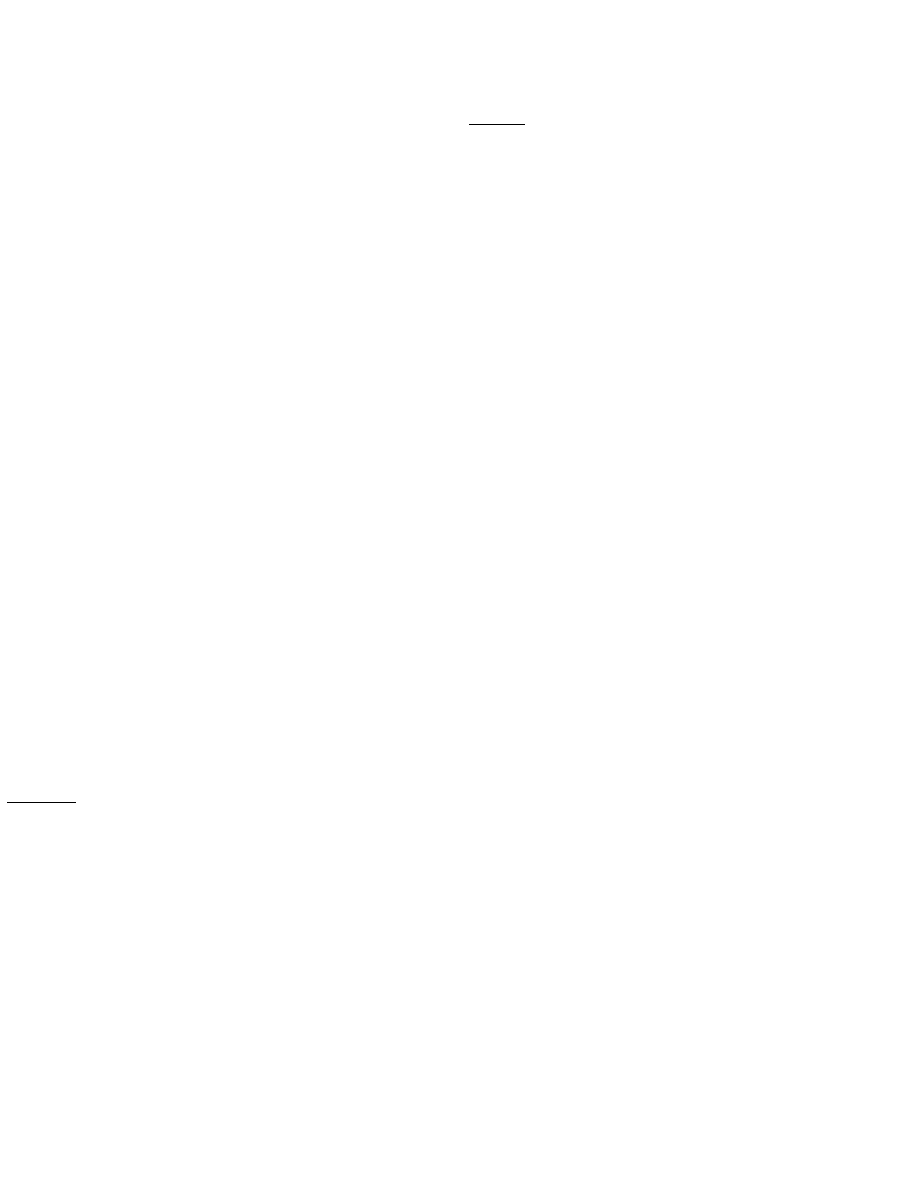
Sygnał dyskretny – model wielkości zmiennej, która jest określona tylko w dyskretnych chwilach czasu. Najczęściej jest to
sygnał powstały poprzez próbkowanie sygnału ciągłego.
W odróżnieniu od sygnału ciągłego, sygnał dyskretny nie jest funkcją zdefiniowaną dla ciągłego przedziału argumentów, lecz
ciągiem liczbowym. Każda wartość ciągu nazywa się próbką (ang. sample).
W odróżnieniu od sygnału cyfrowego, poszczególne próbki sygnału dyskretnego analogowego mogą przyjmować dowolne
wartości z nieograniczonego lub ograniczonego zbioru.
Rys1. sygnał dyskretny
Sygnał cyfrowy – sygnał, którego dziedzina i zbiór wartości są dyskretne. Jego odpowiednikiem o ciągłej dziedzinie i ciągłym
zbiorze wartości jest sygnał analogowy. Znaczenie tego terminu może odnosić się do:
●
wielkości fizycznej, która z natury jest dyskretna (np. liczba błysków lampy w ciągu godziny)
●
wielkości pierwotnie ciągłej i analogowej, która została spróbkowana i skwantowana (np. sygnał na wyjściu komparatora
napięcia kontrolującego pewien proces w określonych chwilach)
●
każdej reprezentacji jednego z powyższych, w tym (najczęściej) w postaci ciągu liczb zapisanych w pamięci maszyny
cyfrowej (np. plik komputerowy typu WAV).
Współcześnie telekomunikacja i elektronika powszechnego użytku prawie całkowicie zostały zdominowane przez cyfrowe
prz
etwarzanie sygnałów, które jest powtarzalne, bardziej niezawodne i tańsze od przetwarzania analogowego.
5. Zmienna losowa: właściwości, opis.
http://www.sendspace.com/file/oehewc
(za dużo wzorów do kopiowania, sorry ;) - E)
7. Modulacje analogowe i cyfrowe.
Modulacje analogowe
●
Modulacje amplitudy
– zmiana amplitudy
- DSB-LC (inaczej AM) (ang. Double-Sideband Large Carrier)
- DSB-SC (ang. Double-Sideband Suppressed Carrier)
- SSB (ang. single-sideband modulation)
- VSB (ang. vestigial-sideband modulation)
●
Modulacje kąta
○
PM (ang. phase modulation)
○
FM (ang. frequency modulation)
1. Modulacje amplitudy
1.1. Modulacja AM
Modulacja AM (ang. Amplitude Modulation
) zwana również A3 lub DSB-LC (ang. Double Sideband with Large Carrier) czyli
dwuwstęgowa modulacja amplitudy z dużym poziomem fali nośnej. Modulacja AM była przez wiele lat powszechnie
wykorzystywana w radiofonii w zakresie fal długich, średnich i krótkich. Obecnie nadal jest tam stosowana, chociaż ze względu
na niską jakość odbioru (ograniczenie przenoszonego pasma i wrażliwość na zakłócenia) coraz mniej jest aktywnych
nadajników tego typu. Modulację AM wykorzystuje się także w radiotelefonii CB (ang. Citizen’s Band) pracującej w paśmie
obywatelskim 27MHz oraz w lotnictwie. W systemach z modulacją AM niewielkie różnice w częstotliwości nośnej w
radiotelefonie pracującym jako nadajnik i w radiotelefonie pracującym jako odbiornik (nawet do ok. 1kHz) nie mają wpływu na
jakość transmisji. Fakt ten ma duże znaczenie w przypadku urządzeń CB, które są sprzętem powszechnego użytku i powinny
być tanie. Ponadto zaletą modulacji AM jest bardzo prosty układ demodulacji (tzw. detektor obwiedni, np. detektor szczytowy)
pracujący bez konieczności odtwarzania przebiegu nośnej w odbiorniku co również ma wpływ na niską cenę odbiorników.

1.1.1. Istota modulacji AM
Modulacja fali nośnej polega na uzależnieniu amplitudy chwilowej sygnału zmodulowanego od wartości chwilowej sygnału
modulującego . Funkcja modulująca jest liniową funkcją sygnału modulującego i reprezentuje amplitudę chwilową sygnału
zmodulowanego . Współczynnik proporcjonalności zwany jest czułością modulatora, natomiast przy braku sygnału
modulującego stanowi amplitudę sygnału zmodulowanego.
1.2. Modulacja DSB-SC
Modulacja DSB-SC (ang. Double Sideband with Suppressed Carrier
) czyli dwuwstęgowa modulacja amplitudy ze stłumioną falą
nośną. Sygnał DSB-SC zawiera tylko dolną i górną wstęgę boczną, a nie zawiera fali nośnej, co pozwala na poprawę
efektywności wykorzystania mocy w systemie telekomunikacyjnym w porównaniu do systemu AM. Pasmo zajmowane przez
sygnał DSB-SC jest jednak takie samo jak w przypadku modulacji AM. Ten rodzaj modulacji nie poprawia więc efektywności
wykorzystania
szerokości pasma.
1.2.1. Istota modulacji AM
W modulacji DSB-
SC harmoniczna fala nośna jest mnożona przez funkcję modulującą , stanowiącą tożsamościową funkcję
sygnału informacyjnego. Zostaje zatem wytworzony sygnał zmodulowany , będący iloczynem sygnału modulującego i fali
nośnej.
1.3. Modulacja SSB
Modulacja SSB (ang. Single Sideband
) zwana również J3 należy do grupy sygnałów jednowstęgowych i jest najczęściej
stosowana w praktyce. Sygnał SSB posiada widmo odpowiadające jednej wstędze bocznej (dolnej lub górnej) widma sygnału
AM. Nie występuje w nim prążek fali nośnej. Stosowanie tej metody modulacji jest o wiele efektywniejsze w porównaniu do
modulacji DSB-
SC, gdyż lepiej jest wykorzystywana przesyłana moc (dzięki eliminacji jednej ze wstęg bocznych) jak również
wykorzystanie dostępnej szerokości pasma kanału. Poprawa ta odbywa się bez utraty informacji, ponieważ pełna informacja o
sygnale modulującym jest przenoszona w jednej wstędze sygnału zmodulowanego. W praktyce SSB jest powszechnie
stosowana w kr
ótkofalarstwie i w radiotelefonii CB. Ze względu na trudność detekcji sygnału SSB, w praktyce stosuje się
również systemy jednowstęgowe, w których oprócz wstęgi bocznej przesyła się również falę nośną przytłumioną 20-70% jej
wartości nominalnej. Takie emisje oznacza się jako R3. Spotykane są również systemy, w których oprócz jednej wstęgi bocznej
przesyłana jest pełna fala nośna. Takie emisje oznacza się H3. Systemy, w których stosowane są modulacje jednowstęgowe z
pełną lub stłumioną falą nośną charakteryzują się gorszym wykorzystaniem mocy przesyłanej niż systemy z modulacją J3.
Pierwszy raz modulacja SSB została komercyjnie wykorzystana 7 stycznia 1927 r. w komunikacji radiowej między Londynem a
Nowym Jorkiem. Modulacja SSB była również wykorzystywana w liniach telefonicznych jako cześć technologii FDM
(multipleksacja z podziałem częstotliwości).
1.3.1. Istota modulacji SSB
Zapis matematyczny sygnału z jednowstęgową modulacją amplitudy SSB powstaje w wyniku pomnożenia zespolonej
harmonicznej fali nośnej przez zespoloną funkcję modulującą . Zespolona harmoniczna fala nośna jest sygnałem analitycznym
odpowiadającym rzeczywistej harmonicznej fali nośnej.
Postać zespolonej funkcji modulującej jest zależna od tego, czy wytwarzany sygnał SSB ma zawierać górną czy dolną wstęgę
boczną. W przypadku wytwarzania sygnału SSB z górna wstęgą boczną (oznaczanego jako USB – Upper Sideband),
zespolona funkcja modulująca stanowi sygnał analityczny, odpowiadający rzeczywistemu sygnałowi modulującemu.
1.4. Modulacja VSB
Modulacja VSB (ang. Vestigial Sideband
) czyli modulacja z częściowo stłumioną wstęgą boczną. Stacje telewizyjne pracujące w
systemie NTSC,PAL, SECAM czyli w analogowym formacie wykorzystują tę metodę jeśli video jest transmitowane w AM ze
względu na dużą ilość danych. Może być również wykorzystywana w cyfrowej transmisji, takiej jak ATSC 8-VSB. Modem firmy
Milgo 4400/48 (użyty w 1966r.) bazował na modulacji VSB i równomiernej zmiany odkodowywania aby zapewnić 4800 bitową
transmisję w ponad 1600 Hz kanale.

2.
Modulacje kąta
2.1. Modulacja FM
Modulacja częstotliwości FM (ang. Frequency Modulation) zwana również F3 jest modulacją ciągłą harmonicznej fali nośnej,
powszechnie stosowaną w radiofonii w zakresie fal ultrakrótkich, w transmisji sygnału w telewizji satelitarnej, sygnału fonii w
systemach telewizji naziemnej, w krótkofalarstwie i w radiotelefonii CB.
2.1.1. Istota modulacji FM
W tym rodzaju modulacji, pulsacja chwilowa , a więc także częstotliwość chwilowa fali nośnej jest liniowo zależna od sygnału
modu
lującego. Fazę chwilową sygnału zmodulowanego FM można wyznaczyć jako wynik całkowania pulsacji chwilowej po
czasie t. W modulacji częstotliwości FM nie tylko pulsacja, ale także faza chwilowa zmienia się wraz ze zmianami sygnału
modulującego. Faza chwilowa sygnału zmodulowanego FM składa się ze składnika liniowego narastającego z czasem oraz z
chwilowej odchyłki fazy . Charakterystyczną cechą, odróżniającą ten rodzaj modulacji od modulacji fazy, jest fakt, że chwilowa
odchyłka fazy w modulacji FM jest proporcjonalna do całki z sygnału modulującego ,a nie bezpośrednio do sygnału , jak ma to
miejsce w modulacji fazy PM. W przeciwieństwie do modulacji analogowych, funkcja modulująca jest tutaj nieliniowa
(eksponencjalna). Modulacja FM jest więc modulacją nieliniową. Rzeczywisty sygnał zmodulowany FM stanowi część
rzeczywistą zespolonego sygnału analitycznego.
2.2. Modulacja PM
Modulacja PM (ang. Phase Modulation
) zwana również G3 jest modulacją ciągłą harmonicznej fali nośnej. Modulacja fazy jest
rzadko używana w systemach analogowych, gdyż modulacja częstotliwości (FM) pozwala na zastosowanie prostszych
modulatorów i demodulatorów sygnału. Sygnał modulowany fazowo można przekształcić na sygnał modulowany
częstotliwościowo i w ten sposób dokonuje się zazwyczaj demodulacji PM. Modulacja fazy jest natomiast szeroko stosowana w
transmisji cyfrowej.
2.2.1. Istota modulacji PM
W tym rodzaju modulacji kąt fazowy fali nośnej jest liniowo zależny od sygnału modulującego. Pośrednio sygnał użyteczny
wpływa także na pulsację (częstotliwość) chwilową sygnału zmodulowanego. W modulacji PM pulsacja chwilowa sygnału
zmodulowanego jest liniowo zależna od pochodnej sygnału modulującego. Jest to istotna różnica w porównaniu z modulacją
FM, w której pulsacja jest proporcjonalna bezpośrednio do sygnału . Rzeczywisty sygnał zmodulowany PM stanowi część
rzeczywistą zespolonego sygnału analitycznego.
Modulacje cyfrowe
●
PSK (phase-shift keying)
●
FSK (frequency-shift keying)
●
ASK (amplitude-shift keying)
●
QAM (quadrature amplitude modulation)
1.1 PSK
PSK (ang. Phase Shift Keying) kluczowanie fazy)
– rodzaj modulacji cyfrowej, w której reprezentacja danych odbywa się
poprzez dyskretne zmiany fazy fali nośnej.
W przypadku PSK zmieniana jest faza sygnału. Istnieją dwie podstawowe metody wykorzystania fazy sygnału w ten sposób:
●
Poprzez kodowanie danych wprost za pomocą fazy, w tym przypadku demodulator musi mieć dostęp do sygnału
odniesienia.
●
Popr
zez kodowanie danych za pomocą zmian fazy, czyli metodą różnicową, wtedy nie potrzebny jest sygnał odniesienia.
Każdy rodzaj cyfrowej modulacji wykorzystuje skończoną liczbę sygnałów w celu reprezentacji danych. W przypadku PSK
używana jest skończona liczba faz sygnału, każdej z nich przypisany jest unikalny układ bitów. Zazwyczaj każda faza dekoduje

tę samą liczbę bitów. Każda sekwencja bitów tworzy symbol reprezentowany przez pojedynczą fazę.Demodulator, specjalnie
dopasowany do sekwencji symboli, które tworzy modulator, określa fazę otrzymanego sygnału i na tej podstawie odtwarza
oryginalne dane. Metoda ta wymaga specjalnego sygnału odniesienia, do którego odbiornik mógłby porównać sygnał otrzymany
w celu określenia fazy. Takie systemy nazywane są systemami koherentnymi.
1.2 FSK
FSK (ang.) Frequency-Shift Keying
– modulacja częstotliwości dla sygnałów cyfrowych, czyli kluczowanie z przesuwem
częstotliwości. Przy stałej amplitudzie harmonicznego sygnału nośnego następuje zmiana częstotliwości: niższej dla symbolu
"zera logicznego" i wyższej dla "jedynki logicznej" informacji binarnej, czasami przypisanie częstotliwości może być odwrotne.
Sygnał zmodulowany może przechodzić z jednej częstotliwości w drugą z ciągłością jego fazy lub bez niej. Jest to równoważne
sytuacji kiedy kluczowane są wyjścia dwóch niezależnych generatorów, albo parametry jednego generatora.
1.3 ASK
ASK (ang. Amplitude-Shift Keying)
– kluczowanie amplitudy. Typ modulacji cyfrowej reprezentującej sygnał cyfrowy w postaci
zmieniającej się amplitudy fali nośnej. Modulacja ASK jest odpowiednikiem analogowej modulacji AM (czyli DSB-LC). Fala
nośna zwiększa lub zmniejsza swoją amplitudę w zależności od zmieniającego się ciągu bitów. W najprostszym przypadku
logiczne 0 jest reprezentowane jako b
rak nośnej (amplituda równa 0) natomiast logiczne 1 jest sygnałem harmonicznym o
określonej amplitudzie. W ASK faza oraz częstotliwość nośnej nie podlega żadnej zmianie. Taki sposób modulacji określa się
często pojęciem OOK (on-off keying) i był wykorzystywany w przypadku komunikowania się za pomocą alfabetu Morse'a.
Zaletami ASK są prostota działania oraz relatywnie małe koszty realizacji. Jednak modulacja ta jest silnie podatna na tłumienie
oraz zakłócenia. Z tego powodu w praktyce wykorzystuje się ją niezwykle rzadko, głównie w transmisjach światłowodowych.
1.4 QAM
Modulacja QAM (ang. Quadrature Amplitude Modulation). Kwadraturowa modulacja amplitudowo-fazowa. Stosowana m.in. w
transmisjach DVB-
C. Modulacja QAM jest kombinacją modulacji amplitudy i fazy. Dane formowane są w dwójki, trójki, czwórki
itd., które odpowiadają zarówno amplitudzie jak i fazie. Tworzone są według diagramu konstelacji (ang.Constellation diagram).
Nośna powstaje w wyniku sumowania dwóch przebiegów: kosinusoidalnego i sinusoidalnego (powstałego z przesunięcia
cosinusoidy w fazie o π/2).Dane w postaci cyfrowej dzielone są na dwa strumienie. Następnie każdy strumień zamieniany jest
na sygnał analogowy w przetworniku cyfrowo analogowym. Analogowy sygnał może przechodzić przez filtr dolnoprzepustowy
(ang. Low Pass Filter
). W kolejnym etapie jeden sygnał mnożony jest przez nośną (ang. Carrier), a drugi przez nośną
przesuniętą w fazie o π/2. Na koniec modulacji obydwa sygnały są sumowane i wysyłane jako sygnał QAM.
8. Wzmacniacze operacyjn
e: właściwości i zastosowania.
Właściwości i parametry.
Nazwa wzmacniacz operacyjny
dotyczyła początkowo układów wzmacniających stosowanych w elektronicznych
maszynach analogowych, wykonując operacje matematyczne typu: dodawanie, odejmowanie, całkowanie, różniczkowanie.
Obecnie pojęcie to odnosi się do wzmacniaczy przeważnie o sprzężeniu bezpośrednim, dużym wzmocnieniu i z reguły
przeznaczonych do pracy w zewnętrznym obwodem sprzężenia zwrotnego. Głównie zewnętrzny obwód sprzężenia zwrotnego,
decyd
uje o właściwościach całego układu. Większość obecnie produkowanych wzmacniaczy operacyjnych ma wejście
symetryczne (różnicowe) oraz niesymetryczne wyjście.
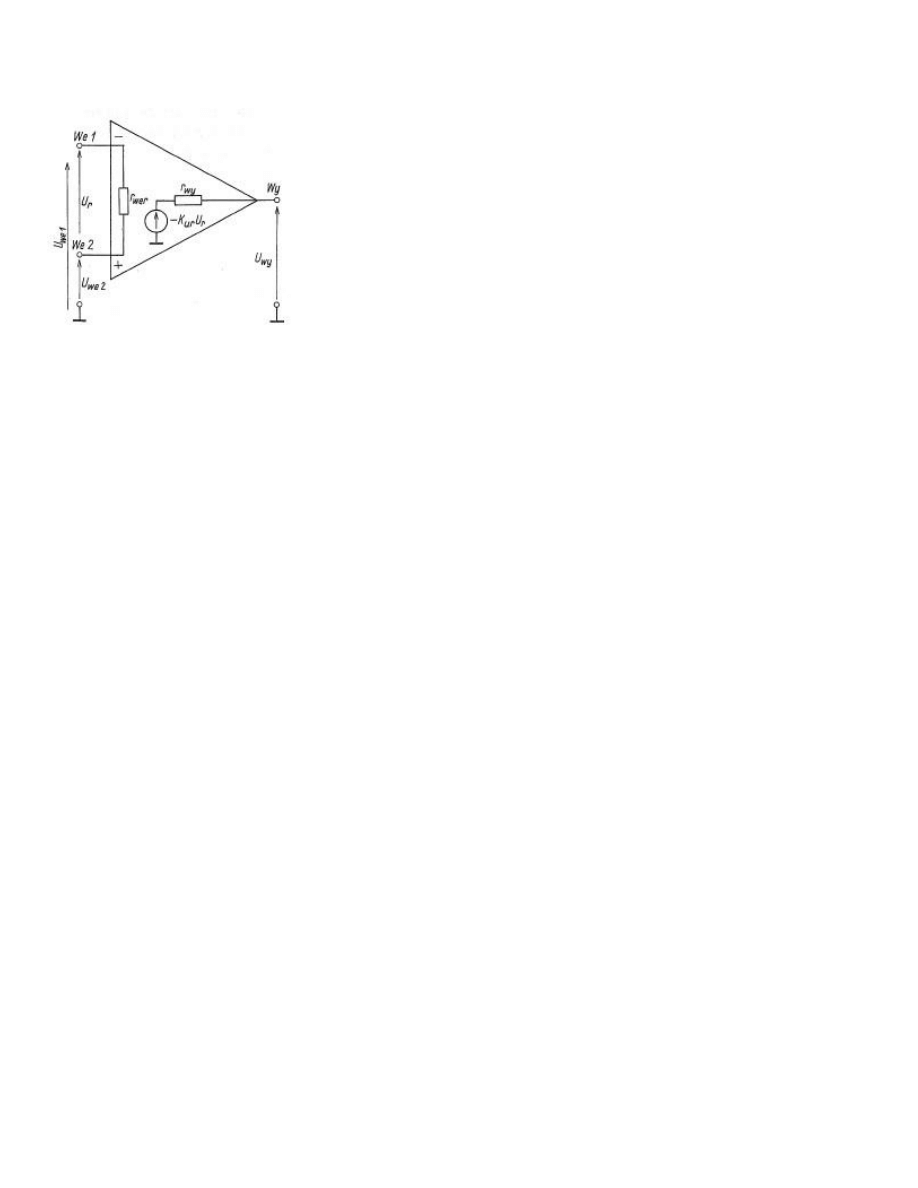
Rysunek jest dla tych, którzy nie pamiętają budowy.
We1 oznaczone minusem , jest
wejściem odwracającym (inwersyjnym), a wejście We2, oznaczone plusem – wejściem nie
odwracającym (nieinwersyjnym).
Jeżeli do wejścia odwracającego zostanie doprowadzone napięcie sinusoidalne, to przesunięcie fazowe między sygnałami
wejściowym i wyjściowym będzie równe 180°. Przy doprowadzeniu tego samego napięcia do wejścia nieinwersyjnego
przesunięcie wyniesie zero. Ważną właściwością wzmacniacza operacyjnego jest to, że gdy do obu wejść zostaną
doprowadzone dwa identyczne sygnały, to sygnał na wyjściu powinien być równy zeru.
Idealny wzmacniacz operacyjny powinien charakteryzować się:
· nieskończenie dużym wzmocnieniem napięciowym,
· nieskończenie dużą impedancją wejściową,
· zerową impedancją wyjściową,
· nieskończenie szerokim pasmem przenoszenia częstotliwości,
· nieskończenie dużym zakresem dynamicznym sygnału.
Podstawowe parametry wzmacniacza rzeczywistego:
1. Wzmocnienie napięciowe różnicowe Kur.
2. Wzmocnienie napięciowe sumacyjne Kus.
3. Wsp
ółczynnik tłumienia sygnału sumacyjnego Hs.
4. Rezystancja (impedancja) wejściowa różnicowa rwe r (ẕwe r).
5. Rezystancja (impedancja) wejściowa sumacyjna rwe s (ẕwe s).
6. Rezystancja (impedancja) wyjściowa rwy (ẕwy).
7. Wejściowy prąd polaryzacyji Iwe.
8. Wejściowe napięcia niezrównoważenia Uwe n.
9. Wejściowy prąd niezrównoważenia Iwe n.
10. Dryfty: temperaturowy i czasowy wejściowego napięcia i prądu niezrównoważenia.
11. Parametry graniczne: maksymalne napięcie wejściowe Uwe max, maksymalne różnicowe napięcie wejściowe Uwe r max,
maksymalne napięcie wyjściowe Uwy max, maksymalny prąd wyjściowy Iwy max.
12. Napięcie Uz i moc Pz zasilania.
13. Szerokość pasma częstotliwości: określona częstotliwością graniczną fg, marginesem wzmocnienia A i marginesem fazy α.
14. Parametry odpowiedzi na skok napięcia: czas narastania tn, szybkość narastania S, przeregulowanie (przerzut) δu.
Zastosowanie wzmacniacza operacyjnego.
1. W układzie wzmacniacza odwracającego.
2. W układzie wzmacniacza nieodwracającego – sygnał wejściowy doprowadza się do wejścia nieodwracającego wzm.
operacyjnego.
3.
Wtórnik napięciowy – przyjmując we wzm. nieodwracającym nieskończoną wartość rezystancji wejściowej na wejściu
odwracającym, uzyskuje się wtedy wzmocnienie napięciowe równe jedności.
4. Inwerter
– kiedy napięcie wejściowe jest równe napięciu wyjściowemu ze zmienionym znakiem.
5.
Wzmacniacz różnicowy – powstaje w wyniku skojarzenia wzmacniacza odwracającego i nieodwracającego, w którym
napięcie wyjściowe jest proporcjonalne do różnicy napięć wejściowych Uwe 2 i Uwe 1.
6.
Sumowanie napięć – kiedy założymy, że rezystancja wejściowa wzmacniacza jest równa nieskończoności, a rezystancje
są równe otrzymujemy algebraiczne sumowanie napięć.
7.
Przetwornik prądu na napięcie – mała rezystancja wejściowa i wyjściowa, a jego napięcie wyjściowe jest proporcjonalne
do prądu wejściowego
8.
Przetwornik napięcia na prąd – powoduje przepływ przez rezystancję obciążenia prądu proporcjonalnego do napięcia
wejściowego.
9. W
układzie różniczkującym - kondensator C jest dołączony do wejścia odwracającego wzmacniacza operacyjnego,
natomiast rezystor R
między wejście a wyjście.
10. W
układzie całkującym (integrator) – otrzymamy go włączając w obwód sprzężenia zwrotnego wzmacniacza,
kondensator a na wejściu rezystor.
11. W diodowych generatorach funkcyjnych.
12. W
układach logarytmujących.
13. W
układach logarytmujących stosunek napięć – po połączeniu dwóch układów logarytmujących i wykorzystując
wzmacniacz różnicowy.
14. Komparator
– jeden z nielicznych układów w których brak jest sprzężenia zwrotnego. Służy do porównywania dwóch
napięć lub do określenia zakresu, w których znajduje się napięcie porównywane. Na jedno z wejść wzmacniacza operacyjnego,
np. na wejście odwracające, podaje się napięcie odniesienia Uod, a na drugie wejście napięcie porównywane Uwe.
A także:
1.
Metody mnożenia bezpośredniego, w których wykorzystuje się zależność napięcia wyjściowego niektórych układów lub
eleme
ntów od iloczynu wielkości wejściowych.
2. Metody modulacyjne
, w których sygnałami wejściowymi moduluje się niektóre parametry sygnałów zmiennych, a
następnie na ich podstawie określa się iloczyn.
9. Mikroprocesory: budowa, zastosowania.
Mikroproc
esor jest to scalony układ elektroniczny sterowany rozkazami. Układ cyfrowy wykonany jako pojedynczy układ scalony
o wielkim stopniu integracji zdolny do wykonywania operacji cyfrowych według dostarczonego ciągu instrukcji. Pełni on funkcje
obliczeniowe (a
rytmetyczne), steruje przepływem danych i współpracuje z urządzeniami zewnętrznymi, reaguj,,ąc na wysyłane
przez nie sygnały. Wykonywane są w technologii LSI (mikroprocesory 8 – bitowe(, VLSI (mikroprocesory 16-bitowe i 32-bitowe)
lub ULSI (mikroprocesory 64-
bitowe). Firmy wiodące prym w produkcji to: Intel, Motorola, MOS Technology oraz liczne zakłady
dalekowschodnie.
Komputer
Mikroprocesor składa się z 3 zasadniczych bloków:
●
jednostki sterującej (CU, control unit) – jest to blok odpowiedzialny za pobieranie kodu z zewnętrznej pamięci programu,
dekodowanie rozkazów, ustalanie adresów. W jego skład wchodzą między innymi rejestry rozkazów, licznik rozkazów, rejestr
stanu.
●
jednostki wykonawczej (EU, execution unit)
– jest to blok odpowiedzialny za wykonywanie zdekodowanego rozkazu przy
pomocy jednostki arytmetyczno-logicznej (ALU
– Arithmetic Logic Unit) oraz rejestrów (wewnętrznej pamięci mikroprocesora,
zawierającej argumenty operacji oraz ich wyniki). W jego skład wchodzą między innymi rejestry danych i rejestry warunków.
●
jednostki adresowej (MU, memory unit)
– blok odpowiedzialny za pobieranie dostarczanych poprzez magistralę danych z
pamięci RAM. W jego skład wchodzą między innymi rejestry adresowe i wskaźnik stosu.
Do komunikacji między tymi blokami i pamięcią służą magistrale:
●
magistrala danych -
służy do przesyłania danych z/do pamięci i z/do urządzeń wejścia wyjścia,
●
magistrala adresowa -
procesor umieszcza na tej magistrali, adres urządzenia lub pamięci, z ktorym aktualnie się
komunikuje
●
magistral
a sterująca – jest zbiorem dodatkowych sygnałów sterujących Istotnym elementem rozróżniającym architekturę
procesorów jest lista rozkazów.
Wyróżniamy dwa główne typy:
●
CISC (Complex Instruction Set Komputer)
– wykorzystywane rozkazy są różnej długości. Układ wykonujący instrukcje jest
wspomagany pamięcią ROM, w której zapisane są ciągi operacji odpowiadające rozkazom – zmniejsza to obciążenie magistral.
●
RISC (Reduced Instruction Set Komputer)
– rozkazy mają przeważnie stałą długość i tworzą podstawowe operacje
wykonywane przez procesor. Skutkuje to dużym obciążeniem magistrali ze względu na częste odwołania do pamięci.
●
VLIW (Very Long Instruction Word)
– nazwa architektury mikroprocesorów z bardzo długim słowem instrukcji. Obecnie
VLIW oparta jest o archit
ekturę RISC, najczęściej z czterema, maksymalnie ośmioma jednostkami obliczeniowymi.
Zastosowanie:
Mikroprocesor (w skrócie μP) łączy funkcje centralnej jednostki obliczeniowej (CPU) w pojedynczym półprzewodnikowym
układzie scalonym. Pierwszy mikroprocesor działał w oparciu o słowa 4-bitowe, dzięki czemu tranzystory tworzące jego obwody
logiczne mogły zmieścić się w jednym układzie.
Mikroprocesor umożliwił rozwój mikrokomputerów w połowie lat 70. dwudziestego wieku. Przed tym okresem, elektroniczne
CPU b
yły konstruowane z zajmujących wiele miejsca indywidualnych urządzeń przełączających, z których każde było
odpowiednikiem zaledwie kilku tranzystorów. Poprzez zintegrowanie procesora w jeden lub kilka obwodów scalonych o coraz
wyższej skali integracji (zawierających odpowiednik tysięcy lub milionów tranzystorów), stosunek możliwości do ceny procesora
znacząco wzrósł. Od połowy lat siedemdziesiątych, dzięki intensywnemu rozwojowi układów scalonych, mikroprocesor stał się
najbardziej rozpowszechnioną formą CPU, prawie całkowicie zastępując wszystkie inne.
10. Sieci komputerowe: budowa, protokoły, zastosowanie.
Mianem sieci komputerowej (Computer Network) określa się zespół komputerów i urządzeń końcowych, połączonych między
sobą łączami komunikacyjnymi, umożliwiającymi przesyłanie danych. Dostęp komputera do sieci komputerowej odbywa się za
pośrednictwem interfejsu sieciowego. W zależności od rozpiętości fizycznej sieci dzieli się na sieci lokalne (Local Area
Network), sieci miejskie (Metropolitan Area Netw
ork) oraz sieci rozległe (Wide Area Network). Sieci LAN stosowane są często w
biurach, fabrykach lub miasteczkach uniwersyteckich. Te pojedyncze sieci, często połączone są ze sobą w większe grupy, w
ramach jednego miasta, tworzą sieć MAN. Wzajemne połączenie tych sieci pozwala podłączonym do nich komputerom na
wymianę informacji. Idąc dalej, sieci miejskie ponłączono ze sobą w taki sposób, że rozciągają się na przestrzeni krajów oraz
kontynentów, tworząc sieć WAN. Taką jedną, wielką światową
siecią jest właśnie Internet. Takie zorganizowanie łączności pomiędzy komputerami o różnej architekturze oraz obsługiwanych
przez różne systemy operacyjne, wymusiło ustalenie pewnych standardów komunikacji. Na zlecenie twórcy ARPAnetu, a dalej
Internetu
– agencji DARPA (Defense Advanced Research Project Agency) oraz zaangażowaniu MIT, stworzono protokoły

TCP/IP. Technologia IP (Internet Protocol) odpowiedzialna jest za przekazywanie pakietów w sieci, natomiast TCP
(Transmission Control Protocol) sprawdza, czy pakiety dota
rły nie zmienione i we właściwej kolejności.
Sieci można podzielić za względu na rodzaj udostępnianych zasobów, np. P2P (łatwe w budowie, tanie, słaba ochrona danych,
brak serwera głównego), klient–serwer (serwer gromadzi zasoby, nie ma użytkowników bezpośrednich, są wielodostępowi,
posiadają pomocniczych klientów np. serwery plików, drukarek, aplikacji, pocztowe, bezpieczeństwa).
Sieci można również podzielić ze względu na ich topologię:
a) topologia gwiazdy -
połączenia sieci LAN o topologii gwiazdy z przyłączonymi do niej urządzeniami rozchodzą się z jednego,
wspólnego punktu, którym jest koncentrator (HUB), okablowanie całej sieci w tym przypadku opiera się na skrętce cztero
parowej i kart sieciowych z wyjściem na UTP. Odległości pomiędzy komputerami a HUB’em nie powinny przekraczać odległości
100 metrów. Odmiennie niż w topologii pierścienia, każde urządzenie przyłączone do sieci w topologii gwiazdy może uzyskiwać
bezpośredni i niezależny od innych urządzeń dostępu do nośnika. W tym celu urządzenia te muszą współdzielić dostępne
szerokości pasma koncentratora. Topologie gwiazdy stały się dominującym we współczesnych sieciach LAN rodzajem topologii.
Są one elastyczne, skalowalne i stosunkowo tanie w porównaniu z bardziej skomplikowanymi sieciami LAN o ściśle
regulowanych metodach dostępu.
b)
topologia pierścienia - każda przyłączona do sieci stacja robocza ma w ramach takiej topologii dwa połączenia, po jednym ze
swoich najbliższych sąsiadów. Połączenie to opierało się na kablu koncentrycznym, przy wykorzystaniu kart sieciowych z
wyjściem na BNC, oraz trójnika rozdzielającego sygnał. Połączenie takie musiało tworzyć fizyczną pętlę, czyli pierścień. Dane
przesyłane były wokół pierścienia w jednym kierunku. Każda stacja robocza działa podobnie jak wzmacniak, pobierając i
odpowiadając na pakiety do niej zaadresowane, a także przesyłając dalej pozostałe pakiety do następnej stacji roboczej
wchodzącej w skład sieci. Pierwotna, pierścieniowa topologia sieci LAN umożliwiała tworzenie połączeń równorzędnych między
s
tacjami roboczymi. Połączenia te musiały być zamknięte; czyli musiały tworzyć pierścień. Korzyść płynąca z takich sieci LAN
polegała na tym, że czas odpowiedzi był możliwy do ustalenia. Im więcej urządzeń przyłączonych było do pierścienia, tym
dłuższy był ów czas. Ujemna strona tego rozwiązania polegała na tym, że uszkodzenie jednej stacji roboczej najczęściej
unieruchamiało całą sieć pierścieniową.
c) topologia magistrali -
wyróżnia ją to, że wszystkie węzły sieci połączone są ze sobą za pomocą pojedynczego, otwartego
(czyli umożliwiającego przyłączanie kolejnych urządzeń) kabla. Kabel taki obsługuje tylko jeden kanał i nosi nazwę magistrali.
Niektóre technologie oparte na magistrali korzystają z więcej niż jednego kabla, dzięki czemu obsługiwać mogą więcej niż jeden
kanał, mimo że każdy z kabli obsługuje niezmiennie tylko jeden kanał transmisyjny. Oba końce magistrali muszą być
zakończone opornikami ograniczającymi, zwanymi również często terminatorami. Oporniki te chronią przed odbiciami sygnału.
Zawsze, g
dy komputer wysyła sygnał, rozchodzi się on w przewodzie automatycznie w obu kierunkach. Jeśli sygnał nie napotka
na swojej drodze terminatora, to dochodzi do końca magistrali, gdzie zmienia kierunek biegu. W takiej sytuacji pojedyncza
transmisja może całkowicie zapełnić wszystkie dostępne szerokości pasma i uniemożliwić wysyłanie sygnałów pozostałym
komputerom przyłączonym do sieci. Typowa magistrala składa się z pojedynczego kabla łączącego wszystkie węzły w sposób
charakterystyczny dla sieci równorzędnej, długość sieci w tej topologii nie powinna przekroczyć odległości 185 m (licząc od
jednego terminatora do drugiego). Kabel ten nie jest obsługiwany przez żadne urządzenia zewnętrzne. Zatem wszystkie
urządzenia przyłączone do sieci słuchają transmisji przesyłanych magistralą i odbierają pakiety do nich zaadresowane. Brak
jakichkolwiek urządzeń zewnętrznych, w tym wzmacniaków, sprawia, że magistrale sieci lokalnych są proste i niedrogie. Jest to
również przyczyną ograniczeń dotyczących odległości, funkcjonalności i skalowalności sieci. Topologia ta jest, więc stosowana
praktyczna jedynie dla najmniejszych sieci LAN. Wobec tego obecnie dostępne sieci lokalne o topologii magistrali są tanimi
sieciami równorzędnymi udostępniającymi podstawowe funkcje współdziałania sieciowego. Topologie te są przeznaczone
przede wszystkim do użytku w domach i małych biurach.
11. Sterowniki mikroprocesorowe i ich zastosowanie.
Sterownik mikroprocesorowy to sterownik, którego architektura oparta jest na mikrokontrolerze pełniącym kluczową
rolę w jego działaniu. Taki mikrokontroler np. MCS-51 jest odpowiedzialny za operacje numeryczne i logiczne
związane ze sterowaniem.

Przykładami sterowników mikroprocesorowych są np. Sterownik PLC, Regulator PID, Sterownik CNC, Sterownik
PAC
1.
Sterownik PLC -
uniwersalne urządzenie mikroprocesorowe przeznaczone do sterowania pracą maszyny lub
urządzenia technologicznego. Sterownik PLC musi zostać dopasowany do określonego obiektu sterowania poprzez
wprowadzenie do jego pamięci żądanego algorytmu działania obiektu. Cechą charakterystyczną sterowników PLC
odróżniającą ten sterownik od innych sterowników komputerowych jest cykliczny obieg pamięci programu. Algorytm
jest zapisywany w dedykowanym sterownikowi języku programowania. Istnieje możliwość zmiany algorytmu przez
zmianę zawartości pamięci programu. Sterownik wyposaża się w odpowiednią liczbę układów wejściowych
zbierających informacje o stanie obiektu i żądaniach obsługi oraz odpowiednią liczbę i rodzaj układów wyjściowych
połączonych z elementami wykonawczymi, sygnalizacyjnymi lub transmisji danych.
2.
Regulator PID
– (ang. proportional-integral-derivative controller – regulator proporcjonalno-całkująco-
różniczkujący) – w automatyce, regulator składający się z członu proporcjonalnego P o wzmocnieniu kp,
całkującego I o czasie zdwojenia Ti oraz różniczkującego D o czasie wyprzedzenia Td. Jego celem jest utrzymanie
wartości wyjściowej na określonym poziomie, zwanym wartością zadaną.
Regulatora PID używa się np. do sterowania temperaturą procesu, w tym wypadku działa on jak bardzo dokładny
termostat. Może również sterować ciśnieniem, natężeniem przepływu, składem chemicznym, siłą, prędkością i
innymi sygnałami. Regulatory znajdują zastosowanie w przemyśle samochodowym, w tym przypadku ich zadaniem
je
st utrzymywanie stałej prędkości samochodu bez względu na warunki jazdy (tzw. tempomat).
Aby z regulatora PID zrobić regulator:
●
P (proporcjonalny), należy ustawić Ti=∞, Td=0
●
PD (proporcjonalno-
różniczkujący), należy ustawić Ti=∞
●
PI (proporcjonalno-
całkujący), należy ustawić Td=0
3.
Sterownik CNC to typ sterownika mikroprocesorowego, który programuje się za pomocą tzw. G code'u. Nazwa
sterownika pochodzi od typu sterowania CNC (Computer Numerical Control). Sterowniki te używane są m.in. do
kontroli takich u
rządzeń jak: frezarki, tokarki a w szerszym zastosowaniu do sterowania robotami fabrycznymi, które
pracują w tzw. trybie taśmy montażowej np. automaty składające podzespoły samochodowe. W nowoczesnych
maszynach CNC stosuje się sterowniki pracujące na bazie komputera przemysłowego IPC w technologii "PC-based
Automation". W tej technologii sterownik CNC działa programowo, a nie sprzętowo, tak jak to odbywało się w
starego typu dedykowanych sterownikach. Działające w czasie rzeczywistym oprogramowanie TwinCAT zawiera
jądro systemu CNC, PLC i steruje wszystkimi elementami nowoczesnej maszyny numerycznej. HMI czyli interfejs
operatora współpracuje z systemem operacyjnym Windows XP który kontroluje wizualizację procesów i pozwala na
profesjonalne sterowanie maszyn
ą.
4.
Sterowniki PAC zwane sterownikami automatyki są dużymi systemami sterownikowymi przeznaczonymi do
obsługi złożonych procesów technologicznych. Wiele dotychczasowych sterowników PLC o największej wydajności
zostało nazwanych przez producentów sterownikami PAC - przykładem jest tu firma Rockwell wraz ze swoją rodziną
LOGIX (CompactLogix, ControlLogix). Granica pomiędzy dużymi i wydajnymi sterownikami PLC a sterownikami
PAC jest obecnie słabo widoczna.
Współczesne procesy sterowania wykorzystują ogromne ilości sygnałów i danych, począwszy od analogowych i
cyfrowych urządzeń wejścia/wyjścia, poprzez szybkie kamery wysokiej rozdzielczości, a kończąc na wieloosiowych

sterownikach ruchu. Takie zastosowania, jak: szybka produkcja, monitoring pracy maszyn w czasie rzeczywistym,
sterowanie precyzyjne czy sterowanie złożonym procesem, wymagają deterministycznych systemów akwizycji,
zaawansowanej analizy i algorytmów przetwarzania danych.Wyższej klasy sterowniki PLC w pewnym stopniu
spełniają te wymagania. Jednakże do wydajnego przetwarzania tych danych trzeba zastosować odpowiednie środki
informatyczne, m.in. procesory zmiennoprzecinkowe i duże zasoby pamięci. Sterowniki PAC integrują tego rodzaju
gotowe składniki sprzętowe w ramach systemu czasu rzeczywistego, oferując w ten sposób wydajną platformę dla
inżynierów automatyki
13. Bazy danych i ich zastosowania.
Bazy danych to strukturalne zbiory danych powiązane z systemem komputerowym umożliwiającym zarządzanie danymi, edycję,
aktualizację, dodawanie, usuwanie, wyszukiwanie. Struktura zbiorów jest ściśle określona; zbiór posiada swoją strukturę, w
związku z czym zawiera dane jednego konkretnego typu. Baza danych organizuje dane w tabele – kolekcje, element kolekcji
opisuje obiekt, zdarzenie, każdy rekord tabeli (krotka) składa się z atrybutów.
Podstawowe pojęcia:
a) tabela
– jest wizualnym przedstawieniem relacji. W jej budowie można wyróżnić: - wiersze (odpowiedniki krotek) –
przechowują treść tabeli, muszą się od siebie różnić przynajmniej jedną wartością. Kolejność wierszy jest dowolna.
Reprezentacja krotki w terminologii relacyjnej to rekord.
-
kolumny (odpowiedniki atrybutów) – zawierają wartości z określonej dziedziny. Kolumny w jednej tabeli mogą mieć taką samą
dziedziną, ale muszą różnić się nazwami. Kolejność kolumn jest dowolna. Reprezentacja w terminologii relacyjnej to pole
(przecięcie wiersza i kolumny) – składowa krotki.
b) klucz -
zbiór atrybutów (jednego lub wielu), którego wartość jednoznacznie identyfikuje każdą krotkę (wiersz) w relacji (tabeli).
Wyróżniamy dwa główne rodzaje kluczy: klucz główny oraz klucz obcy (atrybut lub kilka atrybutów danej relacji, które
sąkluczem głównym w innej relacji)
c) encja
– podstawowy element modelowania relacyjnego. Nazwa encji jednoznacznie identyfikuje typ lub klasę rzeczy, które
opisuje. Należy definiować w przemyślany sposób nowe encje, ponieważ wszystkie się wzajemnie wykluczają; z tego powodu
każde wystąpienie encji musi być wyraźnie odróżnialne od reszty instancji. Encje posiadająatrybuty, czyli charakteryzujące je
cechy, przyjmujące wartości z określonego zbioru (dziedziny).
d) związek – jest to powiązanie zachodzące pomiędzy określonymi atrybutami krotek lub tej samej relacji. Inaczej mówiąc jest to
logiczne powiązanie między encjami.
e) relacje
– po podzieleniu danych na tabele i zdefiniowaniu pól kluczy podstawowych trzeba wprowadzić do systemu bazy
danych informacje na temat sposobu poprawnego łączenia powiązanych danych w logiczną całość. W tym celu definiuje się
relacje między tabelami:
●
relacja jeden-do-jednego
– w tego typu relacji każdy rekord w tabeli A może mieć tylko jeden dopasowany rekord z tabeli
B, i tak samo każdy rekord w tabeli B może mieć tylko jeden dopasowany rekord w tabeli A. Ten typ relacji spotyka się rzadko,
ponieważ większość informacji powiązanych w ten sposób byłoby zawartych w jednej tabeli.
●
relacja jeden-do-wielu
– jest najbardziej powszechnym typem relacji. W relacji jeden do wielu rekord w tabeli A może mieć
wiele dopasowanych do niego rekordów w tabeli B, ale rekord w tabeli B ma tylko jeden dopasowany rekord w tabeli A.
●
relacja wiele-do-wielu
– rekord w tabeli A może mieć wiele dopasowanych do niego rekordów w tabeli B i tak samo rekord
w tabeli B może mieć wiele dopasowanych do niego rekordów w tabeli A. Jest to możliwe tylko przez zdefiniowanie trzeciej
tabeli, której klucz podstawowy składa się z dwóch pól kluczy obcych z tabel A i B. Relacja wiele-do-wielu jest w istocie dwiema
relacjami jeden-do-
wielu z trzecią tabelą.
f) transakcja
– jest to pewien przemyślany ciąg operacji, które mogą zostać wykonane w całości lub wcale
g) perspektywa
– nazywana również widokiem, jest tymczasową strukturą, którądefiniuje się na podstawie innej tabeli lub tabel.
Może być używana prawie tak samo jak tabela. Nazwy kolumn w perspektywie nie muszą odpowiadać nazwom kolumn w
źródłowych tabelach.
Zbiór celów stawianych relacyjnym bazom danych:
●
wysoki poziom niezależności danych
●
przejrzysty wgląd w dane
●
uproszczenie operacji wykonywanych przez administratora na bazie danych
●
wprowadzenie p
rzystępnych reguł i wskazówek odnośnie zarządzania bazami
●
ujednolicenie sposobu zarządzania plikami
Własności relacyjnej bazy danych:
●
widziana przez użytkownika jako zbiór relacji,
●
dostępny zbiór operatorów umożliwiający wydzielenie lub łączenie części relacji,
●
nie istnieją jawne powiązania między relacjami – realizowane są za pomocą danych,
●
język zapytań jest deklaratywny,
●
użytkownik nie musi znać fizycznej reprezentacji danych,
●
pełna niezależność danych.
14. Przetwarzanie obrazów, metody ich zastosowania.
Rozpoznawanie
ad.23. Zadania i metody rozpoznawania obrazów
Obraz jest to ilościowy opis obiektu, zdarzenia lub zjawiska. Ogólnie ujmując zadanie rozpoznawania obrazów polega na
określaniu przynależności obrazów do pewnych klas w sytuacji braku apriorycznej informacji co do reguł przynależności, a
jedyną dostępną informację stanowi zwykle tzw. ciąg uczący złożony z obiektów, których prawidłową klasyfikację znamy (tzw.
rozpoznawanie z nauczycielem).
Rozpoznawanie obrazów można zdefiniować dokładniej jako wieloetapowy proces przetwarzania informacji, podczas którego
relatywnie duża ilość danych wejściowych zostaje przetworzona na mniejszą ilość danych użytecznych. Proces ten jest
zakończony klasyfikacją, czyli przypisaniem obiektowi numeru klasy.
o
biekt wejściowy ?
ekstrakcja parametrów ?
wektor cech ?
klasyfikacja ?
klasa
Schemat klasyfikacji bez nauczyciela:
wektor cech (dane testowe)
klasyfikator
wynik klasyfikacji
Schemat klasyfikacji z nauczycielem:
wektor cech (dane uczące)
klasyfikator
wynik klasyfikacji
nauczyciel
Wśród metod rozpoznawania obrazów wyróżnić można:
a) metody fizjologiczne (biocybernetyczne), w których dąży się do naśladowania procesów umysłowych przez tworzenie modeli
systemu nerwowego
b) metody programowe (algoryt
miczne), w których głównym celem jest tworzenie formalnych metod opisu zadania
rozpoznawania i związanych z nimi algorytmów możliwych do komputerowej realizacji
Metody algorytmiczne:
●
algorytmy minimalnoodległościowe: stosuje się pewną przestrzeń metryczną, która definiuje odległość pomiędzy dwoma
każdymi elementami tej przestrzeni (czyli mówi się o metryce – na przykład Euklidesa, Hamminga). Przykładami takich
algorytmów są:
- NM (Nearest Mean -
najbliższej średniej) – zaliczany do metod wzroców, w których określenie przynależności nieznanego
obiektu zależy od jego położenia w obszarze wzorca i-tej klasy (sami wyznaczamy wzorzec). Dla każdej klasy liczy się obraz
przeciętny i uśrednia go po liczbie obrazów. Po wyznaczeniu wzorca liczy się odległość.
-
α-NN (Nearest Neighbour - najbliższego sąsiada) – podstawowy algorytm NN ma wadę związaną z jego wrażliwością na błędy
ciągu uczącego S, ponieważ w przypadku, gdy choć jeden element ciągu uczącego zostanie niepoprawnie sklasyfikowany, to
podobnie stanie się z całym jego otoczeniem. Dlatego też wprowadzone algorytm α-NN, który zawiera parametr α
determinujący metodykę rozpoznawania. Parametr α jest małą liczbą całkowitą wybieraną arbitralnie. Zasadę działania tego
algorytmu można przedstawić następująco: gdy zostaje zadana wartość α i mamy obiekt podlegający rozpoznawaniu, to
wyznaczamy odległości tego obiektu od wszystkich obiektów ciągu uczącego S, następnie sortujemy elementy ciągu uczącego
wg rosnących odległości, aby wyselekcjonować α początkowych elementów, potem zaś tworzymy podzbiory dla konkretnych
klas, aby ostatecznie wyznaczyć funkcję przynależności.
Algorytmy minimalnoodległościowe są w praktyce chętnie stosowane ze względu na prostotę i intuicyjność, a także dlatego, że
dają stosunkowo dobre wyniki. Są one jednak kosztowne w realizacji, gdyż wymagają archiwizowania całego ciągu uczącego U
w pamięci systemu rozpoznającego oraz czasochłonnego obliczenia odległości rozpoznawanego obiektu x od wszystkich
elementów ciągu uczącego
, co w ogólnym przypadku zmusza do stosowania dużych mocy obliczeniowych lub godzenia się
z długim czasem obliczeń.
●
algorytm Bayes’a – jeżeli dysponujemy pełną informacją statystyczną, czyli posiadamy dla wszystkich klas wartości
prawdopodobieństwa i rozkłady obrazów w klasie, to możemy wyprowadzić algorytm optymalny. Minimalizuje on średnie ryzyko.
Wyznaczenie bayesowskiej reguły decyzyjnej sprowadza się do wyznaczenia dla każdej ustalonej obserwacji cech optymalnej
decyzji. Algorytm Bayesa jest optymalny pod kątem średniego ryzyka, które definiuje przeciętne prawdopodobieństwo
popełnienia błędu dla 0-1 funkcji strat. Wykorzystuje informacje probabilistyczną - gęstość obrazów w klasach. W praktyce
realizowany przy pomocy estymatorów gęstości na podstawie ciągów uczących. Empirycznym odpowiednikiem alg. Bayesa jest
alg. typu plug-
in (gdzie średnie ryzyko dąży do ryzyka Bayesa). Przy spełnieniu odpowiednich warunków pozwala on osiągnąć
bardzo dobre wyniki rozpoznawania (właśnie jak typ plug-in). Dla 0-1 funkcji strat algorytm α-NN jest bliski algorytmowi Bayesa.
Przekształcenia obrazu
1. Przekształcenia kontekstowe obrazu
1.1 Przekształcenia morfologiczne obrazu
Przekształcenia morfologiczne są jednymi z najważniejszych operacji w komputerowej analizie obrazu, gdyż pozwalają na
bar
dzo złożone operacje, związane z analizą kształtu cząstek, ich wzajemnego rozmieszczenia czy też na złożone procesy
symulacji. Przekształcenia morfologiczne są jednym z najważniejszych operacji w komputerowej analizie obrazu, pozwalają na
najbardziej złożone operacje związane z analizą kształtu elementów obrazu. Obecnie morfologia jest szeroko stosowana jako
jeden z najbardziej użytecznych zestawów narzędzi przetwarzania i analizy obrazów. Morfologiczne podejście do przetwarzania
obrazów jest bardzo naturalne. Obraz binarny rozważany jest jako zbiór, z kolei obraz o wielu poziomach szarości jako funkcja.
Pojęcie filtru morfologicznego jest ściśle związane z pojęciem τ-odwzorowania, czyli operacji niezmiennej względem translacji.
Filtr morfologiczny określany jest jako dowolne odwzorowanie monotoniczne i niezmienne względem translacji, lub inaczej
mówiąc, dowolne monotoniczne τ-odwzorowanie. Dzięki temu wynik filtracji jest taki sam niezależnie od położenia zbioru
reprezentującego obraz. Przykładami prostych odwzorowań są dylacja, erozja, otwarcie i zamknięcie. Można jednak podać
wiele innych przykładów. Należy w tym miejscu zwrócić uwagę jeszcze na jeden fakt, iż wszystkie filtry morfologiczne można
przedstawić za pomocą erozji i/lub dylacji. W morfologii sposób, w jaki rozważane są obrazy, sprawia że wiele problemów
związanych z klasycznym przetwarzaniem, może być rozwiązane poprzez mniej lub bardziej skomplikowane operacje
morfologiczne. Wadą przekształceń morfologicznych jest duża złożoność obliczeniowa.
Pr
zykładowe zastosowania:
-Erozja
-Dylatacja

-otwarcie obiektu
-
zamknięcie obiektu
-
pogrubianie obiektów
-
ściemnianie obiektów
-szkieletyzacja
-gradient morfologiczny
Erozja
jest jednym z podstawowych przekształceń morfologicznych. Jej działanie polega na obcinaniu brzegów obiektu na
obrazie. Dylatacja
służy do zamykania małych otworów oraz zatok we wnętrzu figury. Obiekty zwiększają swoją objętość i jeśli
dwa lub więcej obiektów położonych jest blisko siebie, zrastają się w większe obiekty. Dylatacja jest operacją odwrotną erozji.
Erozje można dokonywać z podstawowymi parametrami oraz za pomocą obiektów strukturalnych zarówno obrazów binarnych
jak i kolorowych.
Kolejnymi funkcjami są operacje otwarcia i zamknięcia obiektu. Dwa opisane powyżej podstawowe przekształcenia
morfologiczne posiadają wspólną wadę. Mianowicie w wyniku ich działania powierzchnia obiektów na obrazie ulega znacznej
zmianie. Erozja przyczynia się do zmniejszania obiektów, a dylatacja do ich zwiększania. Sposobem na pozbycie się tej
niedog
odności jest stosowanie tych dwóch przekształceń w parze. Istnieją dwie możliwości zestawienia ich razem, dające różne
rezultaty. Są to operacje otwarcia i zamknięcia, które można zdefiniować jako:
otwarcie = erozja + dylatacja,
zamknięcie = dylatacja + erozja.
Parametr n
w obu funkcjach określa wielkość elementu strukturalnego użytego do wykonania operacji erozji i dylatacji.
Następnymi operacjami są pogrubianie i ściemnienie obiektów. Polegają one na nałożeniu lub odcięciu wierzchniej warstwy
obiektu
znajdującego się na obrazie na przyłożeniu szablonu strukturalnego SE do każdego punktu obiektu w ten sposób, żeby
punkt centralny pokrywał się z analizowanym punktem. W procesie ściemniania wartość punktu nie zmienia się, gdy SE
pokrywa się z jego sąsiedztwem lub zmienia się wartość 0, gdy szablon SE pasuje do sąsiedztwa rozpatrywanego punktu. W
procesie pogrubiania relacje są odwrotne.
Szkieletyzacja
to zbiór wszystkich punktów, które są w równych odległościach od co najmniej dwóch punktów należących do
brzegu rozpatrywanego obiektu. Proces ten jest wykorzystywany do wyznaczania szkieletów (osiowych punktów)
analizowanych figur.
Gradient morfologiczny
dla funkcji ciągłej L dwóch zmiennych x1 i x2 o ciągłych pochodnych jest zdefiniowany jako
dwustronny wektor [dL/dx1,dL/dx2].
1.2 Filtracja obrazu
Filtracja to usuwanie szumu z obrazu. Intuicyjnie szum jest stochastycznym odchyleniem sygnału od jego wartości rzeczywistej.
Zadaniem filtracji jest eliminacja tego szumu głównie za pomocą metod przetwarzania obrazu. W procesie przetwarzania
obrazów filtry wykorzystywane są do szeregu operacji poprawy jakości i parametrów obrazów.
Zastosowania to min. filtr Sobela, filtr wykrywający narożniki, filtr medianowy i uśredniający, filtry ekstremalne, filtr adaptacyjny
oraz filtry uśredniające jak również filtracja wybranego fragmentu obrazu.
2. Przekształcenia bezkontekstowe obrazu
Przekształcenia bezkontekstowe, zwane inaczej przekształceniami punktowymi, są to przekształcenia dotyczące stopnia
szarości lub nasycenia barwy każdego punktu obrazu oddzielnie. W przekształceniach punktowych wartości stopnia szarości
lub nasycenia barwy poszczególnych punktów obrazu są wynikiem operacji algebraicznych prowadzonych tylko na tym punkcie
-
nie są brane pod uwagę punkty z jego otoczenia.

Operacje nieliniowe są to przekształcenia, w których stopień szarości obrazu wynikowego jest zadaną funkcją nieliniową stopnia
szarości obrazu źródłowego. Klasycznymi funkcjami tego typu są omówione w dalszej części funkcje:
- pierwiastkowania obrazu.
- logarytmowania obrazu.
Operację pierwiastkowania stopni szarości lub nasycenia barwy danego punktu obrazu można zapisać w postaci:
L2(m,n)=sqrt(L1(m,n))
Zastosowanie funkcji pierwiastkowej powoduje podwyższenie kontrastu w obszarze małych wartości L1(m,n). Otrzymany obraz
wynikowy musi być odpowiednio znormalizowany omawianymi wcześniej metodami.
Operację logarytmowania stopnia szarości lub nasycenia barwy danego punktu obrazu można zapisać w postaci:
L2(m,n)=log(L1(m,n)+1)
Zastosowanie
funkcji kwadratowej powoduje podwyższenia kontrastu w obszarze dużych wartości L(m.n) (oznacza to generalne
rozjaśnienie obrazu z bardzo silnym różnicowaniem najjaśniejszych partii. Otrzymany obraz wynikowy również musi być
odpowiednio znormalizowany.
Prz
ekształceniom arytmetycznym poddawany jest stopień szarości lub nasycenia barwy danego punktu obrazu. Stopień
szarości lub nasycenia barwy w danym punkcie obrazu wynikowego jest wynikiem wykonanej operacji arytmetycznej nad
stopniem szarości lub nasycenia barwy w odpowiadającym mu punkcie obrazu źródłowego.
Operacje liniowe są to przekształcenia, w których stopień szarości obrazu wynikowego jest liniową funkcją stopnia szarości
obrazu źródłowego. Do operacji liniowych można między innymi zaliczyć:
- dodawanie lub odejmowanie liczby k do obrazu.
-
mnożenie lub dzielenie obrazu przez liczbę k.
Należy zwrócić uwagę, że operacje arytmetyczne prowadzone na obrazach mogą dawać zaskakujące rezultaty. Często w ich
wyniku otrzymuje się jedynie jednolity biały lub czarny obszar, albo inne dziwne efekty. Związane jest to z faktem, że w obrazie
wynikowym reprezentowanych jest jedynie 256 stopni szarości (od czerni, której odpowiada 0. do bieli, której odpowiada 255),
lub 256 nasycenia barwy dla każdego koloru. Wynik operacji arytmetycznych czę-sto przekracza wartość 255 lub jest ujemny.
Możliwe są tutaj trzy podejścia do otrzymanego wyniku:
-
wszystkie punkty o wartości równych lub wyższych od 255 są wyświetlane jako biel, natomiast wszystkie punkty o mniejszych
lub
równych zero jako czerń, "ten sposób prezentacji wyników operacji arytmetycznych to metoda nasycenia,
-
wszystkie punkty o wartości powyżej 255 są traktowane jako wynik modulo p (p = 256). Ten sposób prezentacji wyników
operacji arytmetycznych to metoda modulo.
-
po każdej operacji arytmetycznej jest wykonywana normalizacja obrazu. Ten sposób prezentacji wyników operacji
arytmetycznych to metoda z normalizacją albo metoda klasyczna.
Normalizację można zdefiniować jako operację punktową polegającą na zmianie wartości stopni szarości poszczególnych
punktów obrazu źródłowego L1(m,n) do ustalonego zakresu tych wartości na obrazie wynikowym L2(m,n), według zadanej
funkcji (najczęściej liniowej). Częstym przypadkiem występującym w praktyce są obrazy, w których z powodu nadmiernego
kontrastu trudno rozróżnić w pewnych obszarach szczegóły. Na przykład fotografując bramę wjazdową do domu o fasadzie
oświetlonej słońcem stajemy przed wyborem:
-
albo prawidłowo naświetlimy tak zwane tło, a wtedy wnętrze bramy po-zostanie niemal czarne (czyli nie potrafimy tam
rozróżnić szczegółów),
-
albo też warunki ekspozycji dopasujemy do wnętrza bramy, co spowo-duje. że fasada budynku wyjdzie na zdjęciu jako jasna
plama (oczywiście też bez szczegółów).
15. Miary i oceny dok
ładności algorytmów przybliżonych.
Algorytmy przybliżone (aproksymacyjne) generują przybliżone rozwiązanie zadania, które najczęściej nie jest optymalne, ale
różni się od niego niewiele w sensie przyjętej miary dokładności. Algorytmy przybliżone stosowane są do rozwiązywania
problemów, dla których znalezienie rozwiązania dokładnego w rozsądnym czasie nie jest możliwe. W szczególności do tej grupy
problemów należą problemy NP-trudne, których rozwiązania nie da się uzyskać w czasie wielomianowym.
Korzystając z algorytmów przybliżonych istotna jest ocena ich dokładności, czyli oddalenie skonstruowanego rozwiązania w
sensie wartości funkcji od optimum. Istnieją różne metody oceny dokładności algorytmów aproksymacyjnych. Trzy
najważniejsze to: oszacowanie najgorszego przypadku, ocena probabilistyczna i ocena eksperymentalna.
Analiza najgorszego przypadku -
jest to oszacowanie, które pokazuje, jaki jest maksymalny błąd rozwiązania wygenerowanego
przez algorytm aproksymacyjny w stosunku do rozwiązania optymalnego, przy czym jest to niezależne od rozwiązywanej
instancji danego problemu. Oszacowanie polega na znalezieniu takiej instancji rozwiązywanego problemu, dla której algorytm
popełni największy błąd. Błąd ten definiuje się jako iloraz wartości funkcji celu rozwiązania otrzymanego algorytmem
przybliżonym przez wartość funkcji celu rozwiązania optymalnego, dla problemu minimalizacyjnego, oraz odwrotność tego
ilorazu, dla problemu maksymalizacyjnego.
Zdefiniowano dwie wartości oszacowania najgorszego przypadku:
– bezwzględne:
,
-
zbiór wszystkich instancji problemu .
- asymptotyczne:
Ocena probabilistyczna -
najgorszy przypadek nie zawsze jest interesujący, bo jest to najczęściej sztucznie skonstruowany
problem daleki od instancji problemów występujących w rzeczywistości. Pożądania wydaje się ocena średniego zachowania się
algorytmu aproksymacyjnego. W analizie probabilistycznej przyjmuje się, że wartości parametrów są realizacjami niezależnych
zmiennych losowych o takich samych rozkładach (i.i.d.). Dla tak określonego problemu
, gdzie n
jest liczbą generowanych
wartości parametrów, zazwyczaj najpierw wykonuje się probabilistyczną analizę wartości, która pozwala wyrazić w prosty
sposób asymptotyczną wartość optimum funkcji celu OPT(
) za pomocą parametrów problemu. Następnie dokonuje się
probabilistycznej ocena badanego algorytmu aproksymacyjnego A
, traktując wartość rozwiązania konstruowanego przez ten
algorytm jako zmienną losową A(
). Wyróżnia się tutaj dwie miary oceny:
– błąd względny, definiowany jako procentowe odchylenie od optimum:
,
-
błąd bezwzględny - silniejsza miara zdefiniowana następująco:
.
W przypadku obu miar oceny bada się zbiegać do 0.
Wyróżnia się trzy rodzaje zbieżności:
– zbieżność z prawdopodobieństwem 1:
-
zbieżność według prawdopodobieństwa:
,
-
zbieżność według średniej:
Ocena eksperymentalna -
służy do badania zachowania średniego (przeciętnego) rozwiązań konstruowanych przez algorytmy
aproksymacyjne. Polega ona na porównaniu, w sensie wartości funkcji celu, rozwiązań skonstruowanych przez dany algorytm z
rozwiązaniami optymalnymi dla dużej (reprezentatywnej) liczby konkretych przypadków rozważanego problemu. Ponieważ
znalezienie optimum jest często bardzo trudne lub wręcz niemożliwe korzysta się z innych możliwości:
●
znalezienie wartości tzw. dolnego ograniczenia wyznaczanego przez osłabienie założeń w problemie wyjściowym,
●
porównanie wartości suboptymalnych rozwiązań z wartościami rozwiązań konstruowanych przez algorytmy wykładnicze,
których obliczenia przerwano z powodu przekroczenia terminu wykonywania obliczeń,
●
porównanie z rozwiązaniami uzyskanymi przypadkowo.
16. Systemy operacyjne komputerów.
Zadaniem systemu operacyjnego jest przekształcenie surowego sprzętu w maszynę łatwą w użyciu. Wraz ze sprzętem tworzy
o
n maszynę wirtualną, która zapewnia:
1) obsługę we/wy: uwalnia użytkownika od konieczności rozumienia złożoności sprzętu we/wy
2) obsługę pamięci operacyjnej: O.S. powinien zapewnić podział pamięci pomiędzy procesy, użytkowników oraz obsługę
pamięci wirtualnej.
3) system plików: zazwyczaj działa w pamięci dyskowej. Umożliwia użytkownikowi pobieranie informacji za pośrednictwem
nazw symbolicznych oraz pozwala nadać strukturę gromadzonym informacjom.
4) ochronę zasobów i obsługę błędów: w wielu współczesnych systemach z zasobów korzysta wielu użytkowników lub
procesów w jednym czasie. Zasoby użytkowników muszą być chronione przed skutkami działania innych procesów (oraz
błędami samych użytkowników)
5) współdziałanie programów: Maszyna wirtualna umożliwia współdziałanie programów tak, aby np. wyniki jednego mogły
służyć jako dane wejściowe innych.
6) sterowanie programami: Maszyna wirtualna zapewnia interfejs, za pośrednictwem którego użytkownik porozumiewa się z nią
w języku wyższego poziomu niż maszynowy.
Większość systemów operacyjnych stosowanych w mikrokomputerach stanowią:
1) systemy dla indywidualnego użytkownika (MS-DOS, MS-Windows, MacOS, BeOS, ...).
2) systemy sterowania procesami (przemysłowymi, kontrola środowiska, monitorowanie stanu pacjentów, ...).
3) Systemy przepytywania plików (bazy danych). 4) Systemy przetwarzania transakcji (rezerwowanie miejsc w samolotach,
operacje bankowe,...)
5) Systemy wielodostępne (wielu użytkowników wykonujących różne zadania).
Porównanie popularnych systemów operacyjnych komputerów osobistych (MS-DOS, rodzina MS-Windows, Unix/Linux):
MS-
DOS należy do systemów, które pozwalają na wykonywanie tylko jednego programu (procesu). Systemy MS-Windows 9x,
NT oraz 2000 Pro pozwalają na wykonywanie współbieżne kilku procesów. System MS-Windows 2000 Server oraz systemy
UNIXopodobne pozwalają na wykonywanie wielu współbieżnych procesów oraz stworzenie wielu maszyn wirtualnych dla
użytkowników. Systemy MS-DOS, MS-Windows 9x obsługują tylko maszyny jednoprocesorowe. Na maszynach z kilkoma
procesorami można uruchamiać systemy firmy Microsoft oparte na technologii NT, a więc MS-Windows NT, 2000 oraz
oczywiście UNIX/Linux.
Aktualnie ważnym kierunkiem rozwoju systemów operacyjnych są systemy sieciowe. Porównajmy je pod względem
oferowanych usług:
1) serwery wydruku: wszystkie systemy rodziny Windows potrafią udostępniać w sieci drukarki podłączone do dowolnego
komputera. W systemie Linux do drukowania uruchamia się specjalny proces. Można także skorzystać z pisania do pliku
reprezentującego drukarkę (każde urządzenie we/wy w systemach Uniksowych jest reprezentowane przez plik). Jeżeli chcemy
udostępnić drukarkę podłączoną do komputera z Linuksem w otoczeniu sieciowym systemów MS-W. można wykorzystać pakiet
SMB (samba).
2) Se
rwery aplikacji: Idea zdalnego uruchamiania aplikacji pojawiła się dla komputerów mainframe (dużych i drogich), aby
efektywnie wykorzystać ich zasoby. Łączenie się z systemem za pomocą terminala (zarówno w trybie tekstowym, jak i w
środowisku graficznym X-Windows) i uruchamianie aplikacji jest standardem w systemach Uniksowych. Z pozostałych rolę
serwera aplikacji może spełniać jedynie MS-W. 2000 server.
3) Serwery plikowe: swoje dyski w sieci mogą udostępniać wszystkie systemy oprócz MS-DOS (oczywiście jeśli nie zainstaluje
się np. Novela). Systemy Windows serii 9x nie pozwalają jednak na swobodną kontrolę praw dostępu do plików. Kontrolę na
poziomie zasobów zapewniają systemy MS-W. NT, 2000 oraz Linux z pakietem Samba.
17. Zadania optymalizacji i tech
niki ich rozwiązywania.
Celem optymalizacji dla danego problemu jest wyznaczenie rozwiązania, które jest najlepsze według przyjętego kryterium
jakości (planowanej drogi, poniesionego kosztu itp.) spośród wszystkich rozwiązań dopuszczalnych. O optimum w punkcje x
(optymalnych wartościach decyzyjnych) można mówić, gdy wartość funkcji celu w tym punkcje jest najlepsza (najmniejsza lub
największa) z możliwych do osiągnięcia. Funkcja minimalizowana/maksymalizowana nazywana jest funkcją celu, a limity
zużycia zasobów ograniczeniami.
Zadania optymalizacji:
a) liniowe
Są to zadania, w których optymalizuje się funkcję linową postaci:
gdzie macierz A ma rozmiar m x n
. Współczynniki w wektorze c często zwane są cenami (albo kosztami). Najczęściej do
rozwiązania stosuje się algorytm simplex.
b) nieliniowe
Są to zadania, w których optymalizuje się funkcje nieliniowe, zazwyczaj w postaci wypukłej. Można wyróżnić zadania z
ograniczeniami i bez ograniczeń. W pierwszego rodzaju zadań są zdefiniowane funkcje ograniczające wartości poszczególnych
zmiennych decyzyjnych, co powoduje, że nie każde rozwiązanie jest dopuszczalne. W drugiego rodzaju zadań wszystkie
rozwiązania są dopuszczalne. W zadaniach z ograniczeniami stosuje się tzw. funkcje kary za przekroczenie ograniczeń, często
jednak także kary za zbliżenie do ograniczeń.
Metody:
zadania optymalizacji liniowe
– Simpleks
zadania optymalizacji nieliniowe
– metody gradientowe i bezgradientowe:
-
gradientowe: największego spadku, zmodyfikowana metoda Newtona
- bezgradientowe: Gaussa
–Seidla, Powella, metoda poszukiwań prostych
Zadania optymalizacji nieliniowej w praktyce najczęściej występują z ograniczeniami. Wśród metod optymalizacji z
ograniczeniami można wyróżnić cztery następujące podejścia:
1. sprowadzanie probl
emu do postaci bez ograniczeń poprzez zastosowanie transformacji zmiennych niezależnych w taki
sposób, że funkcja celu pozostaje niezmieniona;
2. modyfikacja funkcji celu przez wprowadzenie do niej wyrażenia reprezentującego karę za naruszenie ograniczeń;
3. modyfikacja kierunku poszukiwań w otoczeniu ograniczeń przez:
- generowanie kierunku dopuszczalnego (np. metoda Zoutendijka),
- rzutowanie kierunku gradientu (np. metoda Rosena);
4. tworzenie tzw. „ograniczonego sympleksu” (metoda complex)
W typowym
algorytmie poszukiwania minimum bez ograniczeń zaczynamy od jakiegoś punktu początkowego i generujemy
kolejne punkty, które powinny przybliżać się do rozwiązania optymalnego. Typowe metody, w których wykorzystuje się
pochodnąminimalizowanej funkcji (metody gradnientowe) charakteryzują się tym, że iteracje zbiegają stopniowo do otoczenia
punktu optymalnego
, a następnie szybko do samego . W wielu algorytmach optymalizacji bez ograniczeń, szczególnie w
algorytmach gradientowych, wykorzystuje się ideę poszukiwania wzdłuż kierunku. Punktem wyjścia jest określenie punktu
początkowego poszukiwań. Następnie w każdej iteracji wyznacza się koleiny kierunek poszukiwań (w różny sposób dla różnych
metod) i przeszukuje kierunek w celu znalezienia punktu minimum (ma
ksuimum) wzdłuż kierunku, tzn. punktu o możliwie
najlepszej wartości funkcji celu, położonego na prostej wyznaczonej przez aktualne przybliżenie rozwiązania optymalnego i
kierunek poszukiwań. Tym co różni poszczególne metody jest sposób poszukiwań i zastosowana metoda minimalizacji
kierunkowej.
Metoda najszybszego spadku j
est najprostszą z metod kierunków poprawy. Oparta jest na modelu liniowym minimalizowanej
funkcji. Jako kierunek poszukiwań przyjmuje się kierunek minus gradientu (
). Metoda najszybszego spadku jest
jednak wolna i zawodna.
Metodę Newtona w wersji podstawowej wprowadza się przy wykorzystaniu modelu kwadratowego minimalizowanej funkcji.
Model kwadratowy otrzymujemy z obciętego rozwinięcia w szereg Taylora drugiego rzędu w punkcje aktualnego przybliżenia
rozwiązania. W tej wersji nie przewiduje się minimalizacji w kierunku i w rezultacie metoda ta jest zbieżna tylko lokalnie (tzn.
wtedy, gdy punkt początkowy jest dostatecznie blisko optymalnego). Aby zwiększyć obszar zbieżności stosuje się
zmodyfikowaną wersję metody Newtona (poprawka Newtona jest stosowana do generacji kierunku poszukiwań).
Metoda gradientów sprzężonych jest następną metoda opierająca się na modelu kwadratowym funkcji celu. W metodzie tej jako
pierwszy kierunek przyjmuje
my kierunek minus gradientu (jak w metodzie najszybszego spadku), a w następnych iteracjach
generujemy kierunki sprzężone na podstawie informacji o nowej pochodnej i poprzednim kierunku.
Bezgradientowe metody
minimalizacji w kierunku generalnie opierają się na założeniu o unimodalności funkcji celu. Funkcja jest
unimodalna w przypadku, gdy ma tylko jeden punkt stacjonarny (tzn. taki, w którym zeruje się pierwsza pochodna funkcji). Do
typowych metod bezgradientowej minimalizacji w kierunku należą: metoda złotego podziału oraz bezgradientowa metoda
aproksymacji kwadratowej.
18. Systemy dynamiczne, opisy własności.
System dynamiczny przekształca sygnał wejściowy u(t) w sygnał wyjściowy y(t), czyli przekształca jedną funkcję czasu w inną.
Na wartości wielkości wejściowych takiego systemu w chwili t mają wpływ nie tylko wartości wejściowe w tej właśnie chwili, ale
również ich wartości w chwilach wcześniejszych od t. Reakcja układu dynamicznego zależy od warunków początkowych,
pobudzenia i własności samego systemu.
Możemy dokonać klasyfikacji systemów między innymi ze względu na następujące kryteria:
a) ze względu na liniowość układu:
●
systemy liniowe
– można je opisać za pomocą równań liniowych algebraicznych, różniczkowych, różnicowych lub
całkowych
●
systemy nieliniowe
– zawierają przynajmniej jeden element nieliniowy; w praktyce każdy układ jest nieliniowy, lecz zwykle
w przybliżeniu zakłada się jego liniowość lub linearyzuje się jego nieliniową charakterystykę
b) ze względu na charakter sygnałów:
●
systemy ciągłe – wszystkie sygnały wejściowe i wyjściowe są funkcjami ciągłymi w czasie i mogą przyjmować dowolną
wartość z obszaru swojej zmienności. Zwykle opisuje się je przy pomocy równań różniczkowych

●
systemy dyskretne
– przynajmniej jeden sygnał ma charakter dyskretny, czyli przyjmuje tylko określone wartości dla
określonych argumentów. Zwykle opisuje się je równaniami różnicowymi.
c) ze względu na liczbę wejść i wyjść:
●
systemy jednowymiarowe
– jedno wejście i wyjście
●
systemy wielowymiarowe
– wiele wejść i wyjśćd) ze względu na charakter zmienności wymuszeń i parametrów:
●
systemy deterministyczne
– ich działanie można przedstawić za pomocą pewnej funkcji czasu
●
systemy stochastyczne
– działanie systemu można przedstawić przy pomocy mechanizmów probabilistycznych
(s
ygnałów losowych, rozkładów prawdopodobieństwa)
e) ze względu na wpływ czasu na parametry:
●
systemy stacjonarne
– o parametrach niezależnych od czasu
●
systemy niestacjonarne
– o parametrach zależnych od czasu
Do opisu systemów dynamicznych wykorzystuje się:
a) Równanie różniczkowe/różnicowe
Jest to podstawowy opis systemu dynamicznego, który jednoznacznie określa transmitancję. Rozwiązanie tego równania
informuje w sposób jednoznaczny o tym, jaka przy danym warunku początkowym jest reakcja systemu na pobudzenie.
Równanie to oblicza się zazwyczaj dwiema metodami:
●
metoda klasyczna
– polega na wyprowadzeniu równania charakterystycznego, obliczeniu pierwiastków tego równania i
wyznaczeniu stałych na podstawie warunków początkowych. Metoda ta jest ciężka do stosowania w przypadku równań
wyższego rzędu.
●
metoda operatorowa
– pozwala znacznie uprościć tok obliczeń. Polega ona na znalezieniu przekształcenia
pozwalającego zastąpić równania różniczkowo-całkowe zwykłymi równaniami algebraicznymi. Stosuje się w tym celu
transformatę Laplace’a. Systemy istniejące w rzeczywistości są z reguły nieliniowe, stąd opis liniowym równaniem
różniczkowym jest jedynie przybliżeniem zachowań danego systemu.
b) Transmitancję (funkcję przejścia)
c) Współrzędne stanu
W przypadku układów liniowych i nieliniowych coraz częściej stosuje się opis własności układu z użyciem współrzędnych stanu.
Ten sposób opisu ma pewną przewagę nad opisem przy pomocy równania różniczkowego lub transmitancji, gdyż w ich
przypadku trzeba przyjąć warunki początkowe równe zeru.
Charakterystyką czasową układu nazywa się przebieg w czasie odpowiedzi układu na określony standardowy sygnał wejściowy,
podany na wejście układu będącego w stanie równowagi. Stosowanie tych samych sygnałów wejściowych do badania różnych
układów pozwala na porównanie właściwości dynamicznych tych układów i ich klasyfikację. Sygnały wejściowe do określania
charakterystyk czasowych muszą mieć postaćumożliwiającą pełną identyfikację dynamiki układu.
Do opisywania i porównywania własności dynamicznych układów oprócz charakterystyk w dziedzinie czasu stosuje się także
charakterystyki w dziedzinie częstotliwości. Charakterystyka częstotliwościowa opisuje odpowiedź układu na wymuszenie
harmoniczne (sinusoidalne) o częstotliwości zmieniającej się w określonym zakresie.
Wyszukiwarka
Podobne podstrony:
! pytania na obrone (ZIM licenc Nieznany (2)
,pytania na obrone inz,Sposoby Nieznany (2)
GIELDA NA EGZAMIN 2013 id 19029 Nieznany
Na wyk ad id 312279 Nieznany
10, wojtek studia, Automatyka, studia 2010, obrona inz, Pytania na obrone, brak tematu , dyplomowka
odp na zagadnienia, pytania na obronę ochrona środowiska lublin, technologie ochrony środowiska
,pytania na obronę inż,Zasada projektowania cyklonów
,pytania na obronę inż,Cele i sposoby unieszkodliwiania osadów ściekowych
pytania na obrone
,pytania na obronę inż,przekladnie mechaniczne
DOBRE Pytania na obronę lic pielęgniarstwo internistyczne
9, wojtek studia, Automatyka, studia 2010, obrona inz, Pytania na obrone, brak tematu , dyplomowka
pytania na obrone
3, wojtek studia, Automatyka, studia 2010, obrona inz, Pytania na obrone, brak tematu , dyplomowka
pytania na obrone
DYDAKTYKA 2 pytania na obronenkjo
,pytania na obronę inż,ciśnienie hydrostatyczne i parcie hydrostatyczne
,pytania na obronę inż,elementy składowe kanalizacji miejskiej
pytania na obronę ?łość specjalizacyjne leśne
więcej podobnych podstron