EUKLIDESOWA PRZESTRZEŃ AFINICZNA (WEKTOROWA)
RZECZYWISTA
Definicja 1
(
)
1
2
, ,...,
n
u
x x
x
=
(
)
, , ,
n
+ ⋅
\ \
(
)
1
2
, ,...,
n
v
y y
y
=
- nazywamy iloczynem skalarnym
( )
1 1
2 2
/
:
...
n n
u v
x y
x y
x y
=
+
+ +
Możemy go również oznaczać w następujący sposób:
( )
/
:
u v
u v
= D
Definicja 2
tę przestrzeń wektorową nad ciałem z iloczynem skalarnym
oznaczamy i nazywamy euklidesową.
( )
( )
E
\
,
n
JJG
\ D
n
JJG
Definicja 3
Przestrzeń zdefiniowaną z iloczynem skalarnym nazywamy przestrzenią
euklidesową i oznaczamy .
\
E
(
,
, ,
n
n
+ ⋅
JJG
\ \
)
- przestrzeń afiniczna, gdzie w wprowadzono iloczyn
skalarny
n
JJG
\
n
n
Definicja 4
Jeżeli w przestrzeni
E
n
1
2
( , ,..., )
n
u
x x
x
=
to związek:
( )
||:
/
u
u
=
v
nazywamy normą
||
2
2
1
2
||:
...
n
u
x
x
=
+
+ +
2
x
WNIOSEK:
||
Definicja 5
(
)
,
, ,
n
n
E E
+ ⋅
JJG
,
n
x y E
∈
to odległością nazywamy:
d x
( )
,
: ||
||
y
xy
=
JJG
Wykład dr Magdaleny Sękowskiej
strona 1 z 9
Część 15 – Euklid. przest. afiniczna
Definicja 5
-
przestrzeń euklidesowa
n
E
JJG
,
n
u v E
∈
JJG
0
0
u
v
≠ ∧ ≠
Jeżeli
to mówimy, że wektory
są ortogonalne.
( )
u v
,
/
0
u v
=
GEOMETRIA ANALITYCZNA PRZESTRZENI EUKLIDESOWEJ E
3
Oznaczenie:
-
przestrzeń euklidesowa
(
)
,
, ,
n
n
E E
+ ⋅
JJG
-
układ współrzędnych przestrzeni afinicznej
(
)
0
0 , , ,
i j k
i
j
(
)
(
)
(
)
: 1,0,0
: 0,1,0
: 0,0,1
k
=
=
=
UWAGA:
W przestrzeni E
3
zamiast mówić, że dwa wektory są ortogonalne mówimy,
że są prostopadłe. Zachodzi tam również:
|| || || || || || 1
i
j
k
=
=
=
i
i
j i
k k
j
⊥
⊥
⊥
UMOWA:
W E
3
przyjmujemy tzw. ortogonalny układ współrzędnych.
i
j
k
x
y
z
,
n
u v E
∈
JJG
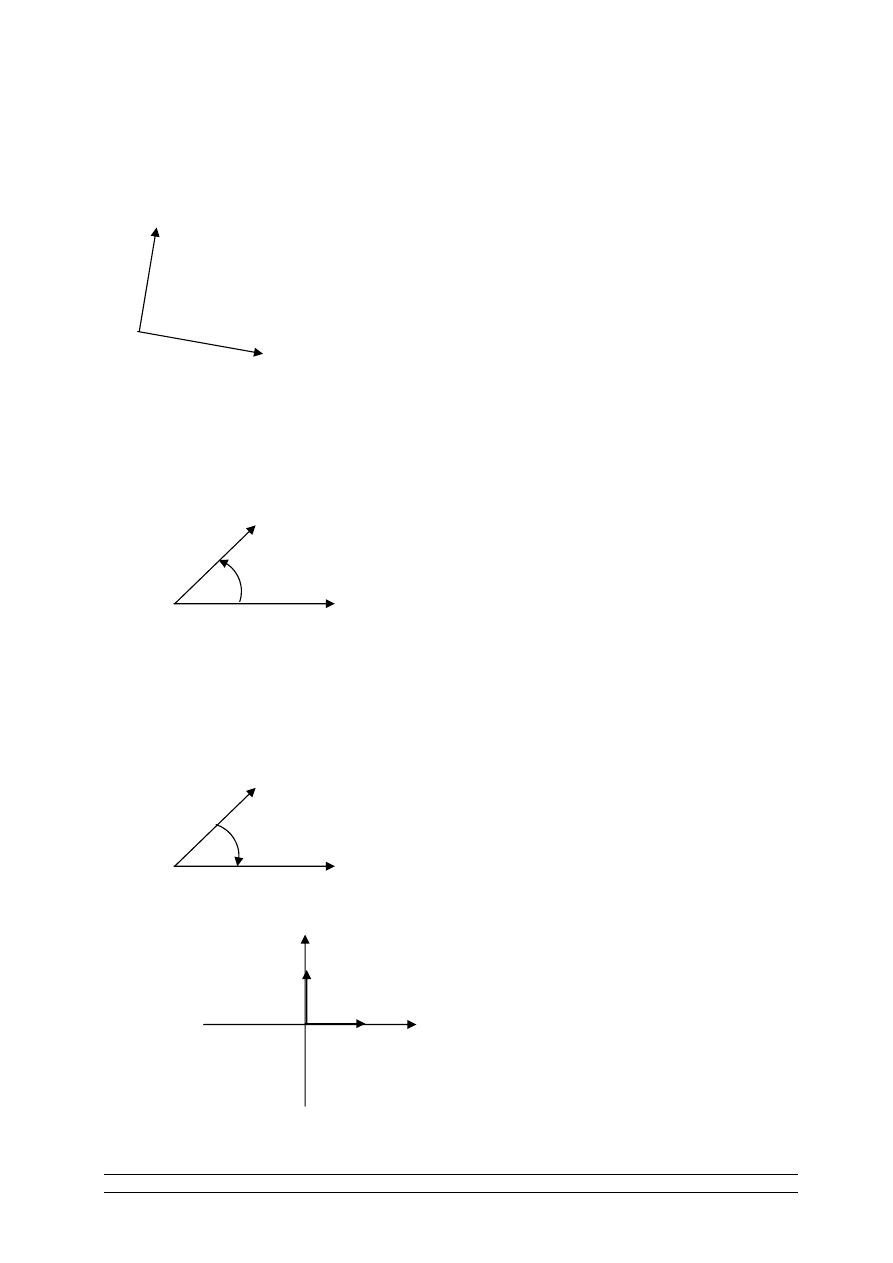
Definicja 1
Kątem między wektorami
nazywamy mniejszy z 2 kątów jakie one
tworzą jeżeli zaczepimy je w początku układu.
( )
,
u v
)
UWAGA:
Dowodzi się, że:
, stąd
( )
|| || || || cos
,
u v
u
v
u v
=
⋅
D
)
( )
cos
,
|| || || ||
u v
u v
u
v
=
⋅
D
)
Wykład dr Magdaleny Sękowskiej
strona 2 z 9
Część 15 – Euklid. przest. afiniczna
n
u E
∈
JJG
Definicja 2
Wersorem wektora nazywamy wektor, który ma ten sam kierunek i zwrot
ale długość równą 1.
u
1
wersu
u
wersu
↑↑
∧
=
JJJJJJG
JJJJJJG
G
G
G
WNIOSEK:
[
]
1
2
3
, ,
u
x x x
=
1
u
≠
0
u
≠
,
,
x
y
z
wersu
u
u
u
=
JJJJJJGG
UWAGA:
, ,
x
y
z
u
u u u
=
( )
cos
,
x
u
u i
u i
u
i
u
=
=
D
)
D
( )
cos
,
y
u
u j
u j
u
j
u
=
=
D
)
D
( )
cos
,
z
u
u k
u k
u
k
u
=
=
D
)
D
Definicja 3.
nazywamy kosinusami kierunkowymi
)
)
)
( )
( )
( )
cos
,
cos
,
cos
,
u i
u j
u k
WNIOSEK:
( )
( )
( )
cos
, ,cos
,
,cos
,
wersu
u i
u j
u k
=
JJJJJJGG
)
)
)
UWAGA:
Wszystkie powyższe definicje i wnioski dotyczą też (odpowiednio)
przestrzeni E
2
.
Wykład dr Magdaleny Sękowskiej
strona 3 z 9
Część 15 – Euklid. przest. afiniczna
ORIENTACJA
2
E
JJG
(
)
2
2
,
,
E E
+
JJG
Orientacja w
( )
( )
'
,
,
a b
O
c d
O
G G
G JG
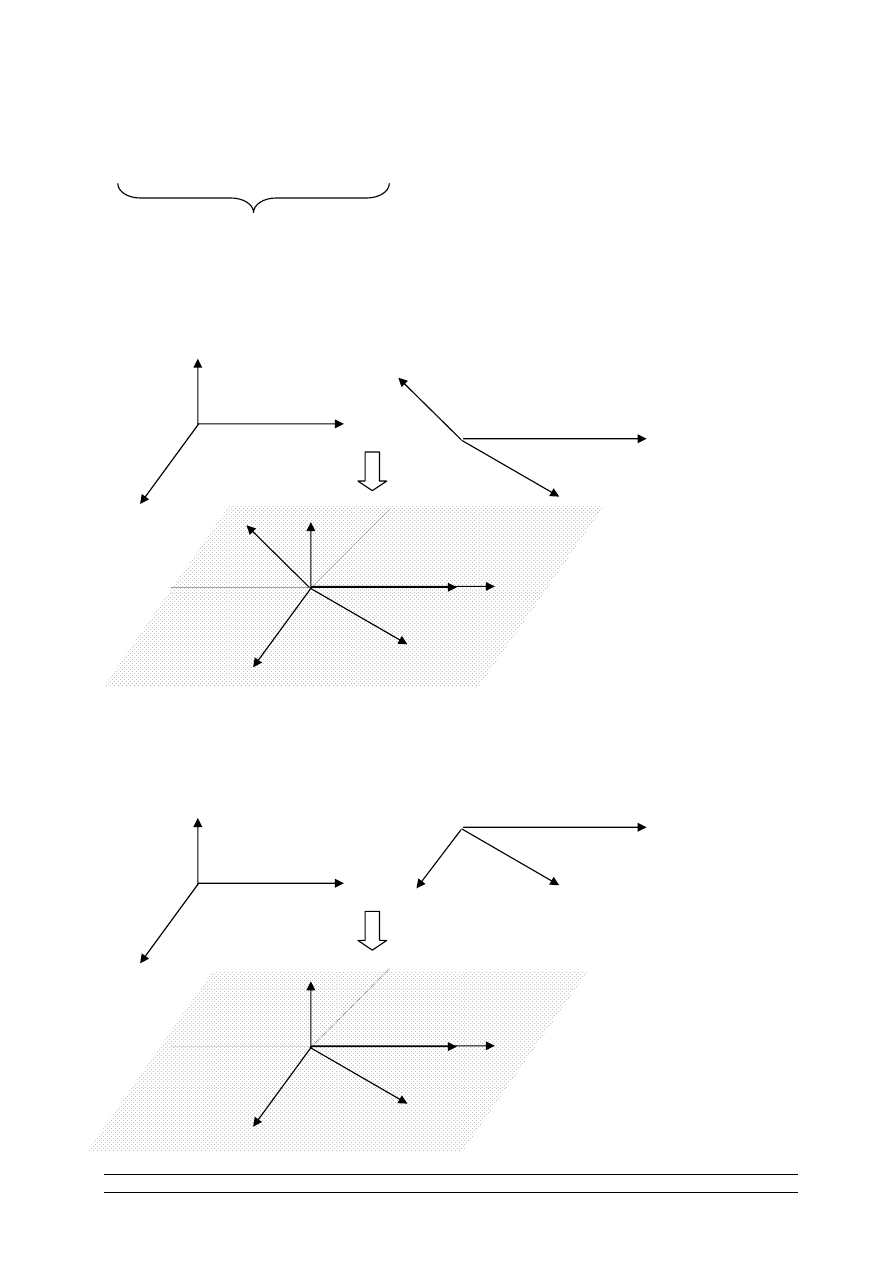
Dwie pary wektorów liniowo niezależnych zaczepionych w punkcie O, O’
Te 2 pary wektorów nazymamy równoskrętnymi jeżeli poprzez
przesunięcie i obrót można doprowadzić do sytuacji, że punkt O pokryje się
z punktem O’, wektory leżą na tej samej prostej i mają ten sam zwrot
a wektory
leżą po tej samej stronie tej prostej.
a c
G G
c d
G J
,
,
G
b
G
c
G
d
JG
a
G
c
G
d
JG
b
G
a
G
2 pary wektorów nazymamy nierównoskrętnymi jeżeli poprzez
przesunięcie i obrót można doprowadzić do sytuacji, że punkt O pokryje się
z punktem O’, wektory leżą na tej samej prostej i mają ten sam zwrot a
wektory
leżą po dwóch stronach tej prostej.
a c
G G
c d
G J
,
,
G
c
G
d
JG
b
G
a
G
J
a
b
G
G
d
G
c
G
Wykład dr Magdaleny Sękowskiej
strona 4 z 9
Część 15 – Euklid. przest. afiniczna
WNIOSEK:
Łatwo zauważyć, że jeżeli ustalimy parę wektorów to pozostałe są do nich
albo równoskrętne albo nierównoskrętne.
Jeżeli ustalimy parę wektorów to mówimy, że nadajemy orientację.
b
G
wektory
są liniowo niezależne
a c
,
G G
a
G
O
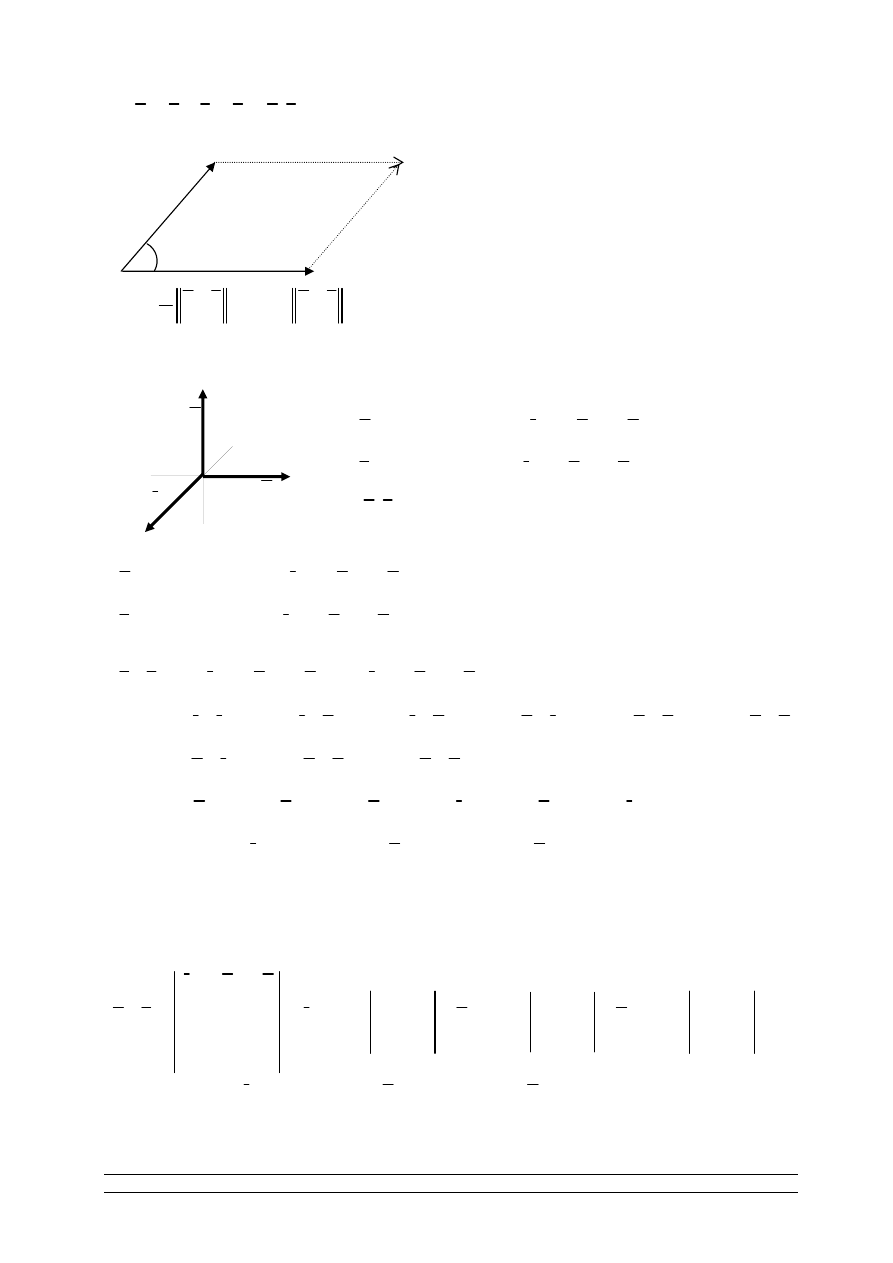
Orientacja dodatnia
Mówimy, że orientacja jest dodatnia, jeżeli obracając wektor wokół
punktu O po najkrótszej drodze tak aby pokrył się z prostą zawierającą
poruszamy się niezgodnie z ruchem wskazówek zegara.
a
G
b
G
b
G
a
G
O
Orientacja ujemna
Mówimy, że orientacja jest ujemna, jeżeli obracając wektor wokół punktu
O po najkrótszej drodze tak aby pokrył się z prostą zawierającą
poruszamy się zgodnie z ruchem wskazówek zegara.
a
b
G
G
b
G
a
G
O
UWAGA:
IV
III
II
j
G
I
i
G
Wykład dr Magdaleny Sękowskiej
strona 5 z 9
Część 15 – Euklid. przest. afiniczna
2
E
JJG
(
)
2
2
,
,
E E
+
JJG
Orientacja w
(
)
(
)
'
, ,
, ,
a b c
O
d e f
O
G G G
JG G JG
Dwie trójki wektorów liniowo niezależnych.
Te dwie trójki wektorów nazywami równoskrętnymi jeżeli poprzez
przesunięcie i obrót można doprowadzić do sytuacji, że punkt O pokryje się
z O’, pary i leżą w jednej płaszczyźnie i są równoskrętne a wektory
d e
J
G J
a b
G G
są po jednej stronie tej płaszczyzny
,
G G
,
,
c f
G
c
G
b
G
a
G
d
JG
e
G
f
JG
a
G
b
d
JG
G
c
G
f
JG
e
G
Jeżeli powyższy warunek nie jest spełniony (tj wektory nie leżą w
jednej płaszczyźnie) to mówimy, że wektory są nierównoskrętne.
c f
,
G JG
d
JG
e
G
f
JG
c
G
b
G
b
G
a
G
a
G
f
JG
a
G
b
JG
G
G
d
e
c
G
Wykład dr Magdaleny Sękowskiej
strona 6 z 9
Część 15 – Euklid. przest. afiniczna

UWAGA:
Jeżeli zadamy trójkę to każde pozostałe są albo równoskrętne albo
nierównoskrętne.
Dla wybranej trójki orientacja jest dodatnia jeżeli możemy zastosować do
niej regułę śruby prawoskrętnej (regułę prawej ręki) (1).
b
G
a
G
b
G
a
G
c
G
(2)
(1)
c
G
Gdy powyższy warunek nie jest spełniony to występuje orientacja ujemna
(2).
Definicja 4
(
)
JJ
3
3
,
,
E E
+
JJG
Iloczynem wektorowym nazywamy odwzorowanie ,
×
×
,
n
u v E
∈
G
3
3
: E
E
E
→
JJG JJG
JJG
3
takie, że:
1.
jeśli
u v : 0
× =
0
0
u
v
= ∨ =
2.
jeśli
w
u
:
v
= ×
0
0
u
v
≠ ∧ ≠
a)
w u
w v
⊥ ∧ ⊥
b)
w
u
c)
jest równoskrętne z przyjętym układem współrzędnych
( )
:
sin
v
u v
=
⋅
⋅
)
(
)
, ,
u v w
,
0
0
u
v
≠ ∧ ≠
Własności:
1.
u v
(
)
v u
× = − ×
2.
(
)
( )
(
u
v u
v
u v
λ
λ
λ
λ
∈
× = ×
=
\
)
×
3.
u
v
(
)
w
u v u w
× +
= × + ×
4.
mówimy, ze są liniowo zależne
u
v
u v
0
0
0
|
u v
u
≠ ∧ ≠ ∧ × = <=> | v
,
Wykład dr Magdaleny Sękowskiej
strona 7 z 9
Część 15 – Euklid. przest. afiniczna
5.
- liniowo niezależne
u
v
0
0 u
≠ ∧ ≠ ∧ ,v
α
1
2
P
u v
P
u
=
×
= ×
+
.
v
6.
- liniowo niezależne
j
k
i
, ,
, ,
x
y
z
x
y
z
x
y
z
x
y
z
u
u u u
u i u j u k
v
v v v
v i v j v k
=
=
+
=
=
+
+
+
,
u v
, ,
, ,
x
y
z
x
y
z
x
y
z
x
y
z
u
u u u
u i u j u k
v
v v v
v i v j v k
=
=
+
=
=
+
+
+
(
) (
)
(
)
( )
(
)
( )
( )
( )
(
)
( )
(
)
( )
(
)
( ) ( )
(
)
( )
(
) (
) (
)
,
,
x
y
z
x
y
z
x x
x y
x z
y x
y y
y z
k x
k y
k z
x y
x z
y x
y z
k x
k y
y z
k y
k x
y x
x y
y x
y z
k y
k x
y x
x y
v v
u i u j u k
v i v j v k
u v i i
u v i j
u v i k
u v j i
u v
j j
u v j k
u v k i
u v k j
u v k k
u v k
u v j
u v k
u v i
u v j
u v i
u v
u v i
u v
u v j
u v
u v k
u v
u v u v
u v u v
u
× =
+
+
×
+
+
=
=
× +
× +
× +
× +
× +
×
+
× +
× +
× =
=
−
−
+
+
−
=
=
−
+
−
+
−
=
=
−
−
−
y x
v
+
„OBRAZEK”:
u v
=
−
=
−
(
) (
) (
)
1 1
1 2
1 3
( 1)
( 1)
( 1)
,
,
y
z
x
y
x
z
x
y
z
y
z
x
y
x
z
x
y
z
y z
k y
k x
y x
x y
y x
y z
k y
k x
y x
x y
y x
i
j
k
u
u
u
u
u
u
u
u
u
i
j
k
v
v
v
v
v
v
v
v
v
u v
u v i
u v
u v j
u v
u v k
u v
u v u v
u v u v
u v
+
+
+
× =
= −
+ −
+ −
=
+
−
+
−
=
−
−
Wykład dr Magdaleny Sękowskiej
strona 8 z 9
Część 15 – Euklid. przest. afiniczna
Definicja 7
Iloczyn mieszany
JJ
Wykład dr Magdaleny Sękowskiej
strona 9 z 9
Część 15 – Euklid. przest. afiniczna
E
E
E
3
3
3
×
×
→
G JJG JJG
\
3
, ,
u v w E
∈
G G JG JJG
Iloczynem mieszanym nazywamy:
( ) ( )
:
uvw
u v w
= ×
GGJG
G G
JG
D
WŁASNOŚCI:
1.
2.
u
v
u v
( )
( )
u v w u v w
×
=
×
G G
JG G
G JG
D
D
G
G
JG
0
0 w
≠
≠
≠
G
G JG
G0
,
( )
0
,
w
u v w
×
= <=>
G JG
D
są wektorami liniowo zależnymi
(leżą w jednej płaszczyźnie)
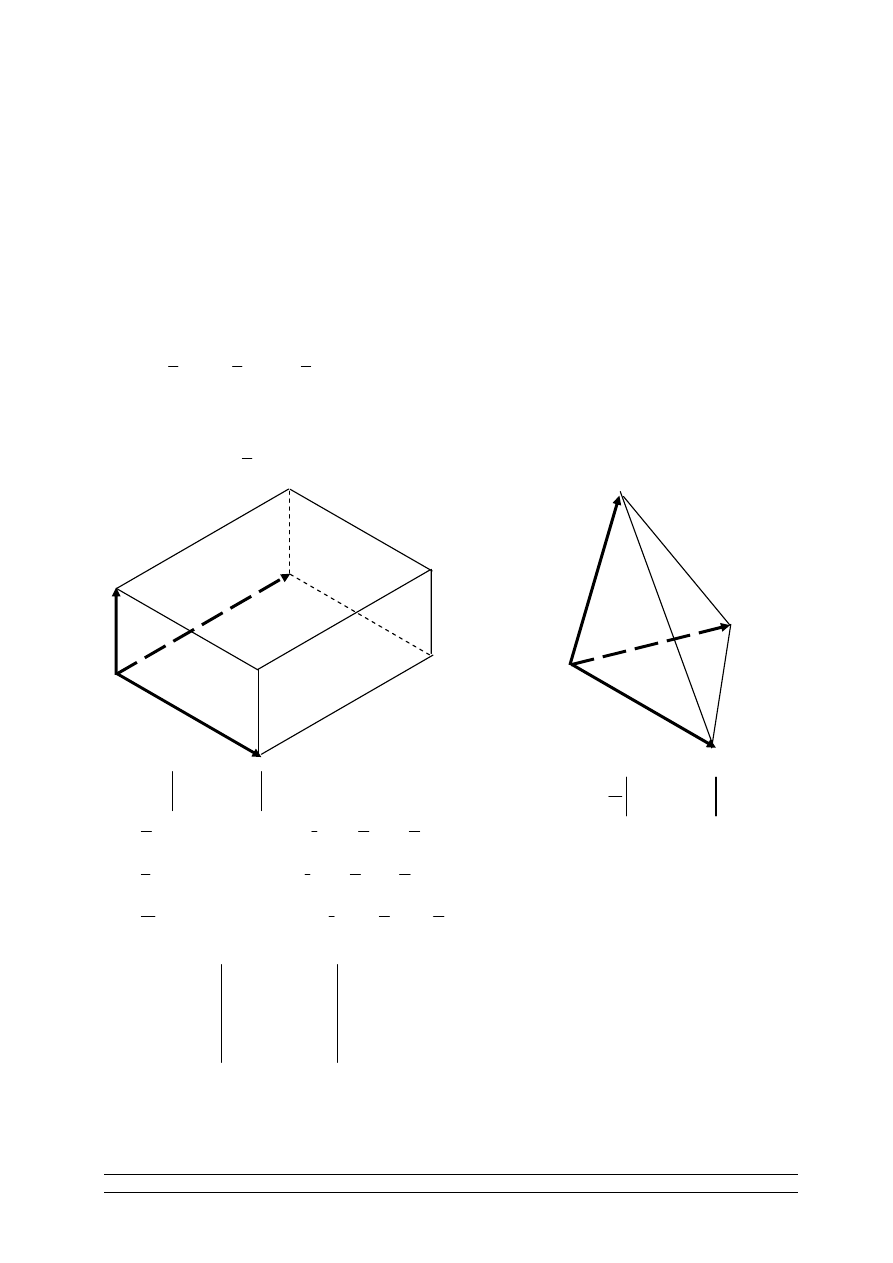
3.
( )
0
u v w
×
≠
G
G JG
D
w
JG
v
G
u
G
u
G
v
G
w
JG
( )
V
u v w
=
×
G G
JG
D
( )
1
6
V
u v
=
×
G G
JG
D w
4.
, ,
, ,
,
,
x
y
z
x
y
z
x
y
z
x
y
z
x
y
z
x
y
z
u
u u u
u i u j u k
v
v v v
v i v j v k
w
w w w
w i w j w k
=
=
+
+
=
=
+
+
=
=
+
+
( )
x
y
z
x
y
z
x
y
z
u
u
u
uvw
v
v
v
w
w
w
=
GGJG
Wyszukiwarka
Podobne podstrony:
15 euklidesowa przestrzen cdid Nieznany (2)
15 Powt rzenie wyk ead 15id 16 Nieznany
15 zwiazki fenolowe wykladid 16 Nieznany
2013 01 15 ustawa o srodkach pr Nieznany
15 torbielowatosc nerek 2012 1 Nieznany (2)
105 15 Czynniki cyrkulacyjne ks Nieznany (2)
15 Erozja powietrzna (16 02 2010)
lecture 15 Multivariate and mod Nieznany
2 15 4 kanaly ze szczelinami (v Nieznany
15 Komplement Iid 16030 Nieznany (2)
15 XII materialoznawstwoid 1625 Nieznany (2)
16 pdfsam Tbwcz skrypt labid 16 Nieznany
cw 15 formularz id 121556 Nieznany
eteczka2012 dodatekdo2011 id 16 Nieznany
4 Koncepcje przestrzeni Indust Nieznany
15 bole glowyid 16115 Nieznany (2)
AM2 15 Rownania rozniczkowe rze Nieznany (2)
więcej podobnych podstron