AKADEMIA TECHNICZNO-HUMANISTYCZNA
W BIELSKU-BIAŁEJ
KATEDRA PODSTAW BUDOWY MASZYN
Instrukcje laboratoryjne
Charakterystyki skokowe liniowych elementów automatyki
2. Charakterystyki skokowe liniowych elementów automatyki
Cel wiczenia:
Celem wiczenia jest identyfikacja obiektów automatyki metod odpowiedzi na skok
jednostkowy (charakterystyk czasowych), wyznaczenie własno ci dynamicznych badanych
obiektów oraz wyznaczenie transmitancji obiektów.
Wst p
Charakterystyk skokow nazywamy odpowied elementu na skokowe wymuszenie
( )
( )
t
u
t
u
1
0
=
wprowadzone na jego wej cie.
( )
≥
<
=
0
dla
1
0
dla
0
t
t
t
1
Charakterystyki skokowe okre la si zwykle do wiadczalnie i wówczas stanowi podstaw do
identyfikacji elementu [1] wyznaczaj c jednoznaczny opis w relacji wej cie-wyj cie elementu
w funkcji czasu.
Przebieg wiczenia:
•
Nale y zbudowa kolejno według podanych w tab. 2.1 schematów badane obiekty
elektryczne i poł czy z generatorem i rejestratorem zgodnie z rys. 2.1.
•
Uwaga: przed wykonaniem charakterystyki nale y sprawdzi prawidłowo poł cze
elektrycznych. Ustawi na generatorze pr d wyj ciowy 0,01 A. Wykona
charakterystyki skokowe zgodnie z zaleceniami prowadz cego zaj cia.
•
Zarejestrowa odpowiedzi skokowe obiektów dla podanych przez prowadz cego
kombinacji parametrów R, L, C, wykonuj c dla ka dej kombinacji jeden pomiar.
•
Zbudowa układ do zdejmowania charakterystyk skokowych w oparciu o gotowe
obiekty i zarejestrowa odpowiedzi skokowe.
•
Zmierzy oporno ci badanych obiektów.
Uwaga: Zanotowa nastawy rejestratora podczas zdejmowania
charakterystyk skokowych.
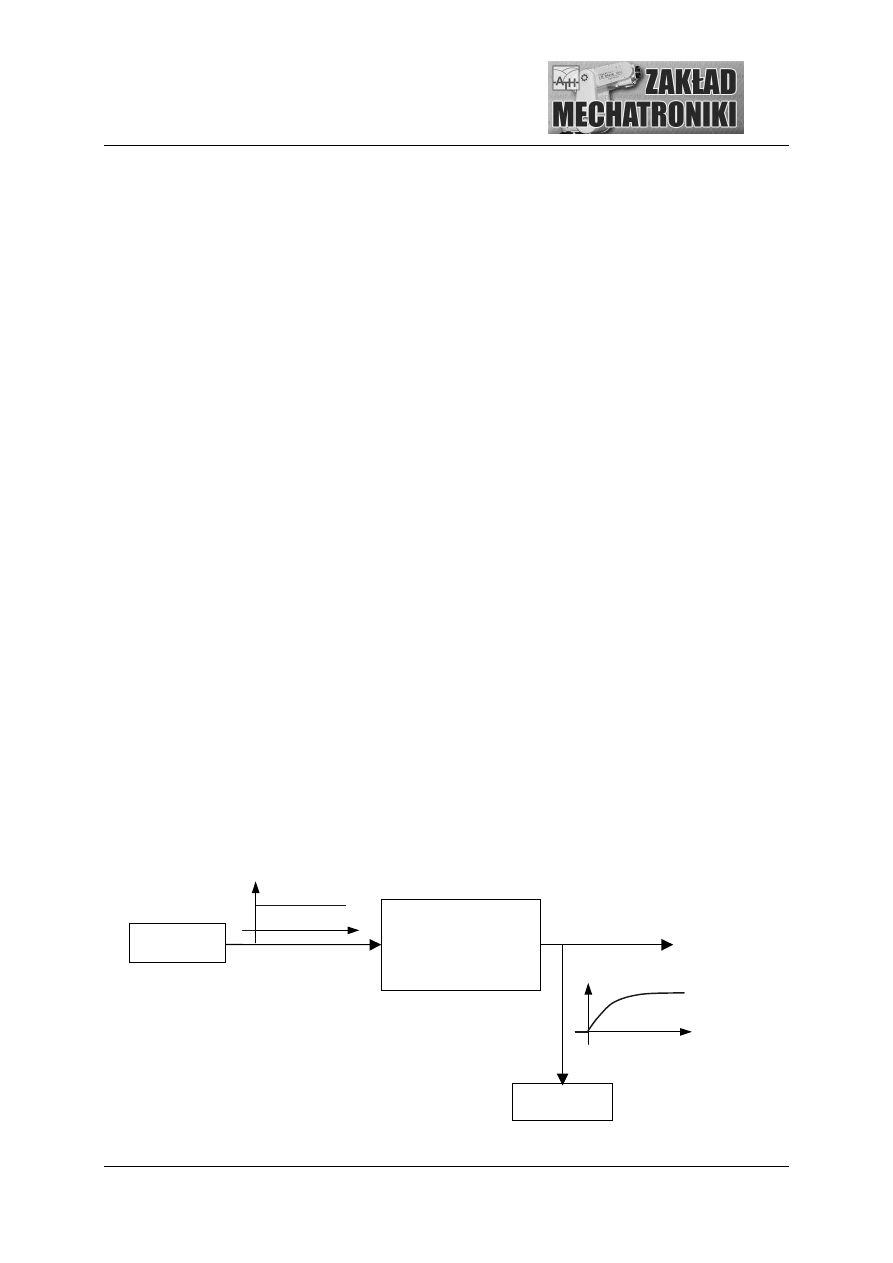
Rys.2.1. Schemat układu do zdejmowania charakterystyk skokowych.
Element
automatyki
u(t)=1I(t)
y(t)
Generator
Rejestrator
u(t)
1
t
y(t)
t
AKADEMIA TECHNICZNO-HUMANISTYCZNA
W BIELSKU-BIAŁEJ
KATEDRA PODSTAW BUDOWY MASZYN
Instrukcje laboratoryjne
Charakterystyki skokowe liniowych elementów automatyki
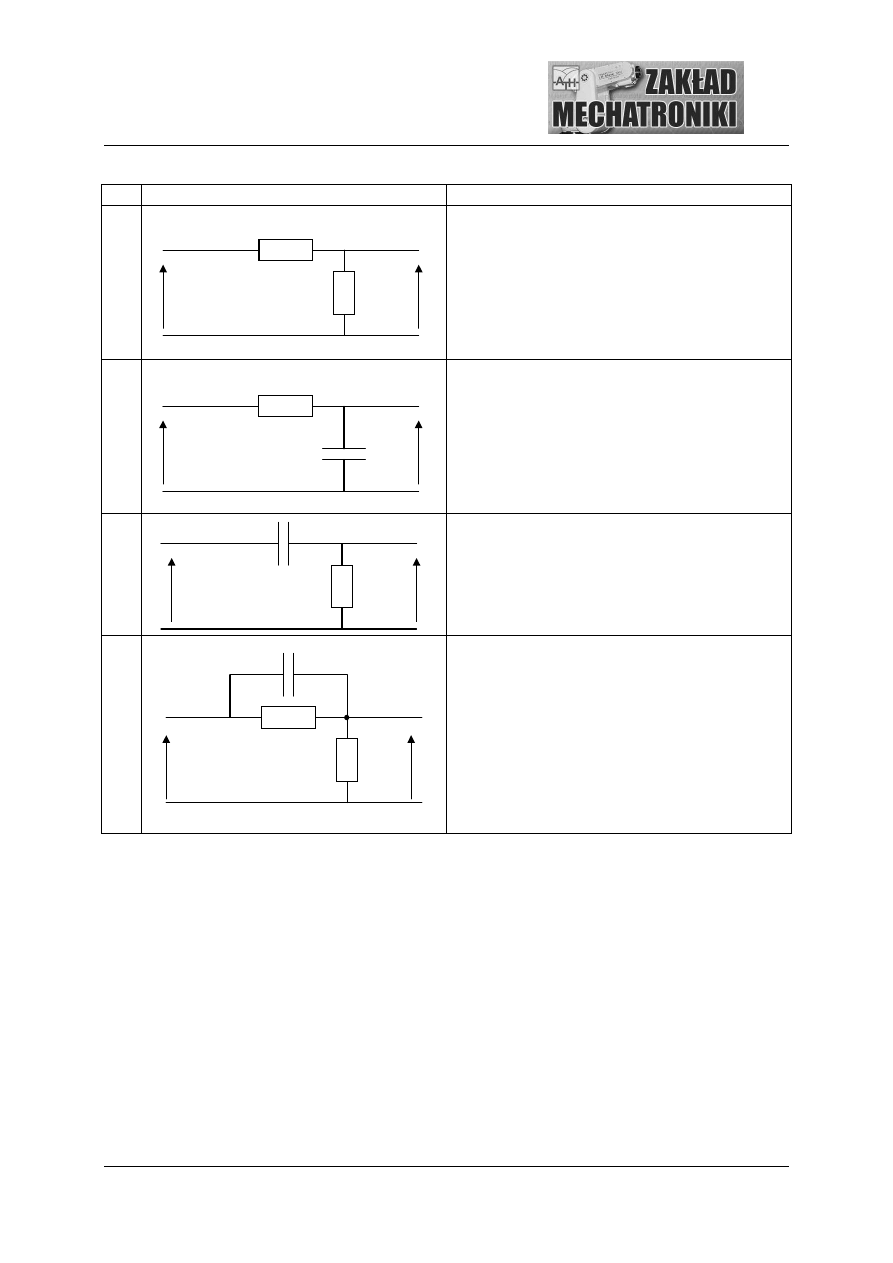
Tab.2.1. Schematy badanych elementów liniowych
Nr
SCHEMAT UKŁADU
WARTO
PARAMETRÓW
1.
1. R
1
= 5 k
Ω
R
2
=5 k
Ω
2. R
1
= 10 k
Ω
R
2
=5 k
Ω
3. R
1
= 15 k
Ω
R
2
=5 k
Ω
4. R
1
= 10 k
Ω
R
2
=5 k
Ω
5. R
1
= 10 k
Ω
R
2
=10 k
Ω
6. R
1
= 10 k
Ω
R
2
=15 k
Ω
2.
1. R
1
= 1 k
Ω
C=2200
µ
F
2. R
1
= 2,5 k
Ω
C=1470
µ
F
3. R
1
= 5 k
Ω
C=1000
µ
F
4. R
1
= 10 k
Ω
C=470
µ
F
3.
1. R
1
= 1 k
Ω
C=2200
µ
F
2. R
1
= 2,5 k
Ω
C=2200
µ
F
3. R
1
= 5 k
Ω
C=1000
µ
F
4. R
1
= 10 k
Ω
C=1000
µ
F
4.
1. R
1
= 10 k
Ω
R
2
= 10 k
Ω
C=1000
µ
F
2. R
1
= 10 k
Ω
R
2
= 4 k
Ω
C=2200
µ
F
3. R
1
= 4 k
Ω
R
2
= 10 k
Ω
C=2200
µ
F
4. R
1
= 4 k
Ω
R
2
= 1 k
Ω
C= 4400
µ
F
R
1
R
2
U
Y
R
1
C
U
Y
C
R
1
U
Y
R
1
R
2
C
U
Y
AKADEMIA TECHNICZNO-HUMANISTYCZNA
W BIELSKU-BIAŁEJ
KATEDRA PODSTAW BUDOWY MASZYN
Instrukcje laboratoryjne
Charakterystyki skokowe liniowych elementów automatyki
Nr
SCHEMAT UKŁADU
WARTO
PARAMETRÓW
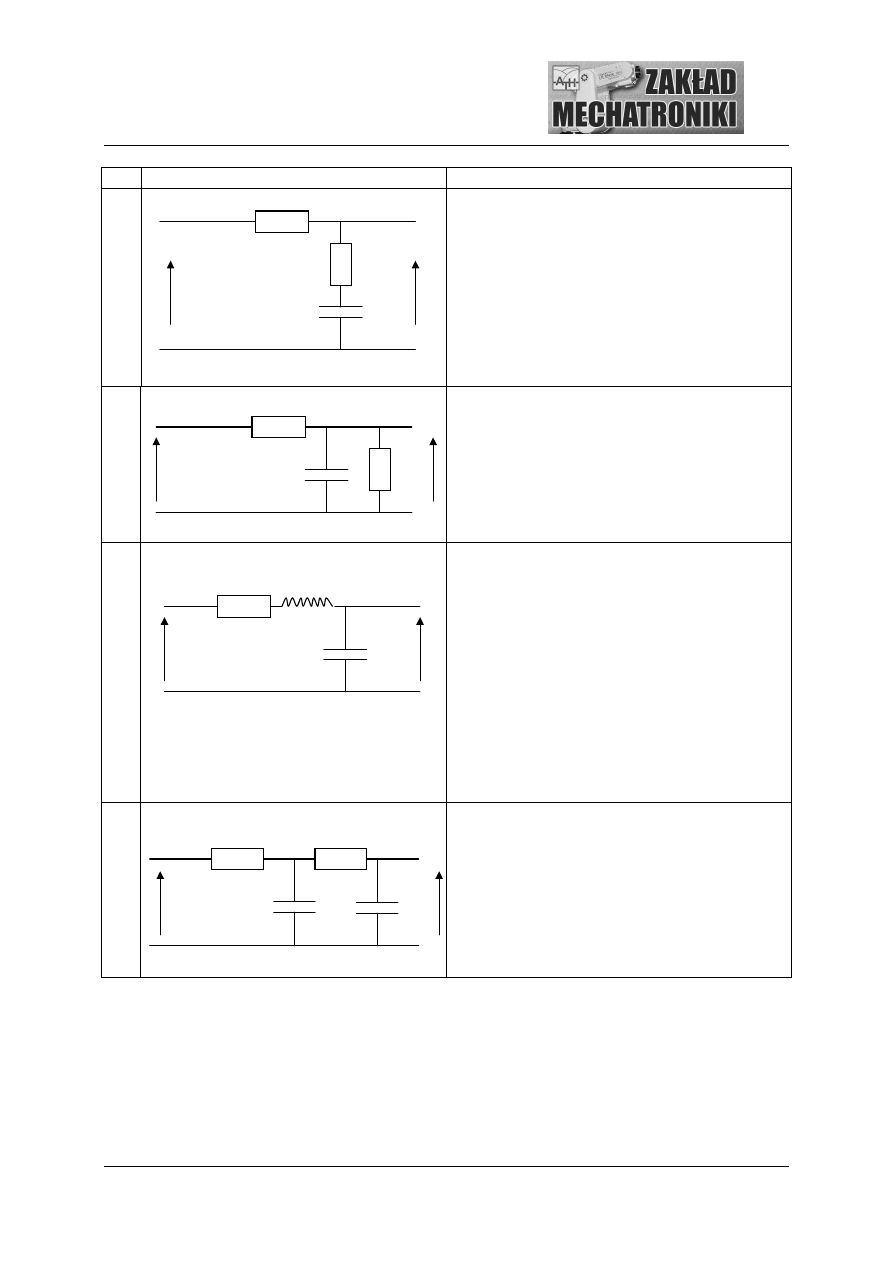
5.
1. R
1
= 10 k
Ω
R
2
= 10 k
Ω
C=1000
µ
F
2. R
1
= 10 k
Ω
R
2
= 4 k
Ω
C=2200
µ
F
3. R
1
= 4 k
Ω
R
2
= 10 k
Ω
C=2200
µ
F
4. R
1
= 4 k
Ω
R
2
= 10 k
Ω
C=1000
µ
F
6.
1. R
1
= 1 k
Ω
R
2
= 10 k
Ω
C=2200
µ
F
2. R
1
= 1 k
Ω
R
2
= 20 k
Ω
C=2200
µ
F
3. R
1
= 5 k
Ω
R
2
= 100 k
Ω
C=2200
µ
F
7.
1. R
1
= 0
Ω
C=4400
µ
F
2. R
1
= 10
Ω
- || -
3. R
1
= 30
Ω
- || -
4. R
1
= 50
Ω
- || -
5. R
1
= 75
Ω
- || -
6. R
1
= 100
Ω
- || -
7. R
1
= 125
Ω
- || -
8. R
1
= 0
Ω
C=470
µ
F
L- nieliniowe
8.
1. R
1
= R
2
= 10 k
Ω
C
1
= C
2
=1000
µ
F
2. R
1
= 1 k
Ω
R
2
= 10 k
Ω
C
1
= C
2
=2200
µ
F
3. R
1
= R
2
= 10 k
Ω
C
1
=470
µ
F C
1
=2200
µ
F
Uwagi o sprawozdaniu:
•
Okre li transmitancje operatorowe obiektów wskazanych przez prowadz cego
i obliczy parametry dynamiczne wyst puj ce w tych transmitancjach.
•
Z zarejestrowanych odpowiedzi skokowych wyznaczy parametry dynamiczne
obiektów i porówna z obliczonymi analitycznie (T, k).
R
1
R
2
C
U
Y
R
1
C
R
2
U
Y
R
1
L
C
U
Y
R
1
C
1
R
2
C
2
U
Y

AKADEMIA TECHNICZNO-HUMANISTYCZNA
W BIELSKU-BIAŁEJ
KATEDRA PODSTAW BUDOWY MASZYN
Instrukcje laboratoryjne
Charakterystyki skokowe liniowych elementów automatyki
•
Dla elementu oscylacyjnego(R, L, C) oszacowa okres oscylacji i obliczy
zredukowany współczynnik tłumienia
ξ
.
•
Dokona analizy wpływu zmiany parametrów elektrycznych na parametry
dynamiczne elementów.
Literatura
[1]. Maczy ski K., Kłosi ski J., Piko S., Suwaj S.: Podstawy automatyki w przykładach i wiczeniach
laboratoryjnych. Skrypty dla szkół wy szych. Politechnika Łódzka, Łód 1989.
Wyszukiwarka
Podobne podstrony:
Charakterystyki skokowe wybranych elementow liniowych
2. Charakterystyki statyczne wybranych elementów liniowych, Rok II, Semestr 4, P. T. S. i S
1. Charakterystyki statyczne wybranych elementów liniowych, ATH, Wejściówki, PTSiS
Charakterystyki czestotliwo ciowe wybranych elementow liniowych
Charakterystyki czestotliwo ciowe wybranych elementow liniowych
Charakterystyka dynamiczna wybranego elementu ukladu sterowania, Inż + seminarium
2. Charakterystyki skokowe liniowych elementów automatyki, ATH, Wejściówki, PTSiS
Sprawozdanie 1 Wyznaczenie charakterystyk skokowych i impulsowych dla zadanych elementów liniowych w
Elementy liniowe i nieliniowe obwodów elektrycznych, pomiar charakterystyk stałoprądowych (3)
Elementy liniowe i nieliniowe obwodów elektrycznych , pomiar charakterystyk stałoprądowychx
Elementy liniowe i nieliniowe obwodów elektrycznych, pomiar charakterystyk stałasdfaoprądowych
(),elektronika i elektrotechnika L, Elementy liniowe i nieliniowe obwodów elektrycznych, pomiar char
elektronika i elektrotechnika, Elementy liniowe i nieliniowe obwodów elektrycznych, pomiar charakter
Wybrane elementy automatyki instalacyjnej
Czaczyk charakterystyka uzytkowa wybranych rozpylaczy plaskostrumienicowych
sprawko elementy liniowe i nieliniowe
Sprawozdanie Badanie obwodów prądu stałego zawierającego elementy liniowe i nieliniowe (Moje)x
więcej podobnych podstron