Ć w i c z e n i e 15
POMIAR SIŁY ELEKTROMOTORYCZNEJ OGNIWA
I CHARAKTERYSTYKA JEGO PRACY
15.1. Opis teoretyczny
Aby zbudować obwód prądu stałego należy posiadać źródło napięcia stałego (np. ogniwo,
akumulator). Wewnątrz tych źródeł zachodzą procesy rozdzielające ładunki przeciwnych
znaków i dzięki temu na wyjściach źródła pojawia się napięcie. Mogą one mieć różne natury,
np.:
a) procesy chemiczne - w ogniwach i akumulatorach;
b) procesy elektromagnetyczne - w prądnicach prądu stałego i zmiennego;
c) procesy termoelektryczne - w termoogniwach lub termoparach;
d) procesy fotoelektryczne - w fotoogniwach.
Tak wytworzone napięcie na źródle powoduje powstanie wewnętrznego pola elektrycznego E
(rys. 15.1). Siły F
s
umożliwiające powstanie napięcia na źródle muszą więc być skierowane
przeciwnie do tego pola i nie mogą mieć charakteru elektrostatycznego. Umożliwiają one
ruch nośników ładunku (elektronów, dziur, jonów itp.) w kierunku przeciwnym do wewnątrz
źródłowego pola E (tzn. np. dodatnie ładunki poruszają się od – do +). Siły te działające na
nośniki ładunku w źródle naszą nazwę elektromotorycznych. Pole sił elektromotorycznych
wynoszące:
0
s
S
q
F
E
0
=
gdzie:
0
s
F jest siłą elektromotoryczną działającą na ładunek q
0
musi być większe od pola
elektrostatycznego E
(
)
E
E
S
〉
gdy z ogniwa czerpiemy prąd. W sytuacji granicznej, gdy z
ogniwa nie pobieramy prądu (np. ogniwo jest rozwarte)
E
E
S
= .
E
+
I
F
s
Rys 15.1 Obwód całkowity źródła prądu stałego.
R
z
R
w
W nomenklaturze fizycznej poprzez siłę elektromotoryczną ogniwa
ε rozumiemy największe
napięcie (wyrażone w woltach), jakie można zmierzyć na źródle. Ma to miejsce w sytuacji, w
której przez źródło nie płynie prąd (np. na rozwartym źródle). Natomiast, gdy ze źródła po-
bieramy prąd, to również przez źródło płynie prąd i napięcie U mierzone na nim jest po-
mniejszone o spadek napięcia I R
w
na oporze wewnętrznym źródła R
w
:
U =
ε - I R
w
(15.1)
Z równania (15.1) wynika, że przy obciążeniu źródła (tzn. przy poborze prądu) napięcie na
rezystancji wewnętrznej rośnie, natomiast napięcie na jego biegunach staje się mniejsze od
siły elektromotorycznej
ε i to tym bardziej, im silniej obciążone jest źródło prądu. To zmniej-
szanie się napięcia na biegunach źródła wskutek obciążenia tego źródła coraz silniejszym
prądem nazywamy charakterystyką pracy źródła. Przebieg tej charakterystyki zależy oczy-
wiście od rezystancji wewnętrznej źródła R
w
.
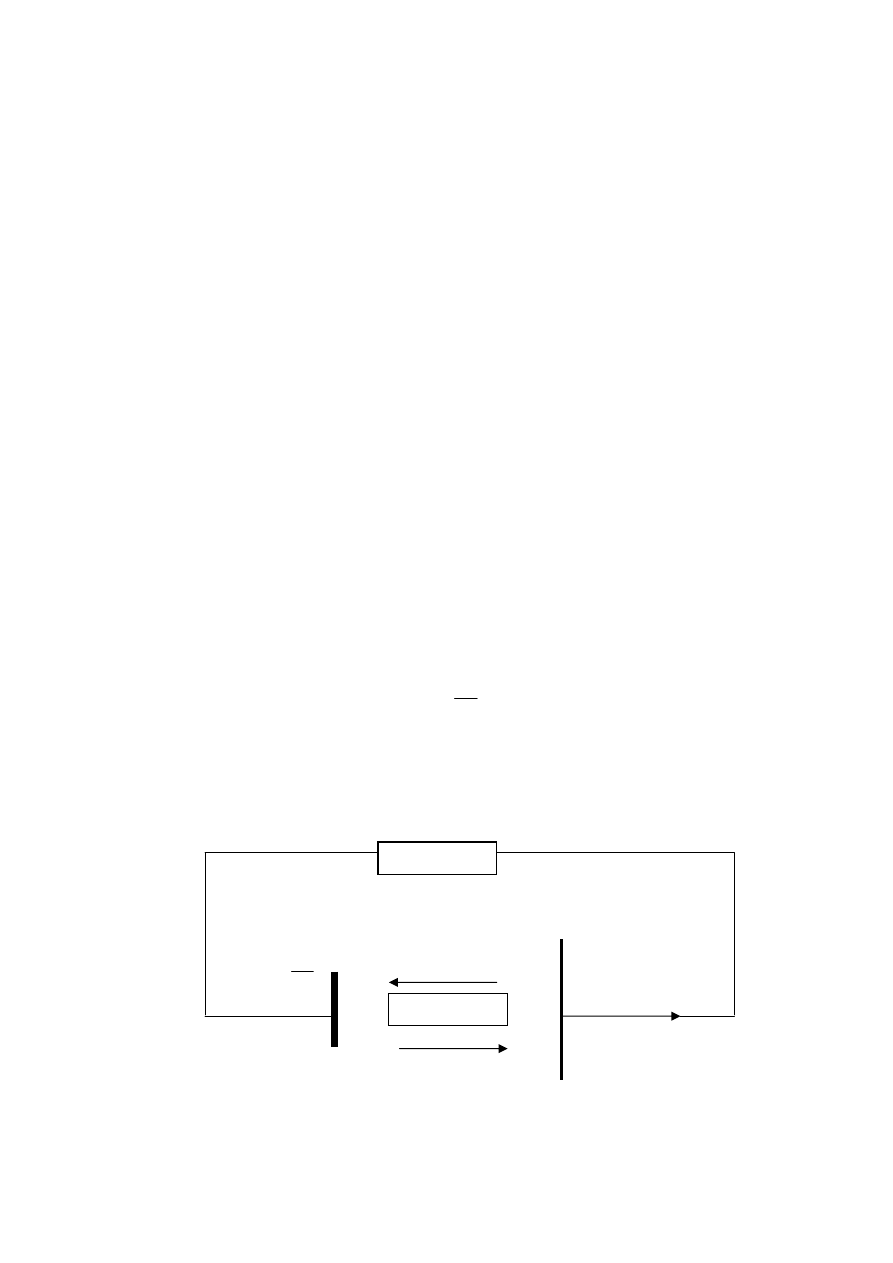
Jedną z najprostszych metod określenia siły elektromotorycznej jest metoda kompensacyj-
na(rys. 15.2).
R
1
S
I
2
U
R
R
2
U
2
ε
x
Rys. 15.2. Zasada pomiaru napięcia na źródle metodą kompensacyjną
Napięcie na badanym źródle
x
ε
jest zrównoważone (skompensowane) przez napięcie U
2
uzyskane z dzielnika napięcia
2
1
R
R
R
+
=
. Źródło zasilające mostek napięcia U musi być
większe od
x
ε
i włączone przeciwstawnie do niego (tzn. + do + i - do -). Regulując suwa-
kiem S dobieramy takie napięcie U
2
, aby galwanometr G nie wskazywał przepływu prądu (I
2
=0). Wówczas :
R
R
U
U
ε
2
2
x
=
=
(15.2)
G
Jak widzimy w tej sytuacji przez mierzoną baterię nie przepływa prąd, a więc rzeczywiście
tutaj dokonujemy pomiaru siły elektromotorycznej
ε
x
. Jest to metoda bezpośrednia, ale wy-
maga dokładnej znajomości wartości napięcia U zasilającego dzielnik napięcia .
S
U
R
R
w
ε
w
ε
x
(R
x
)
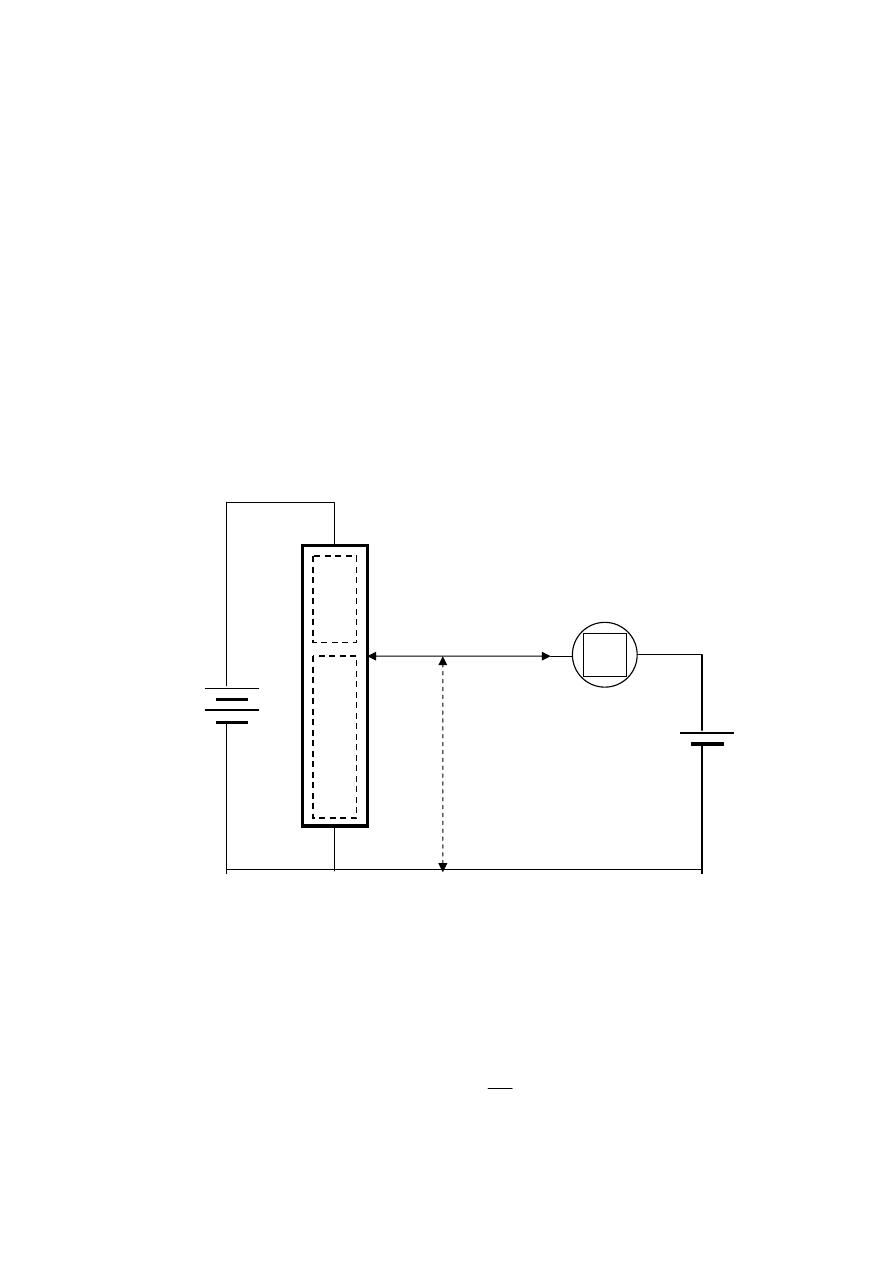
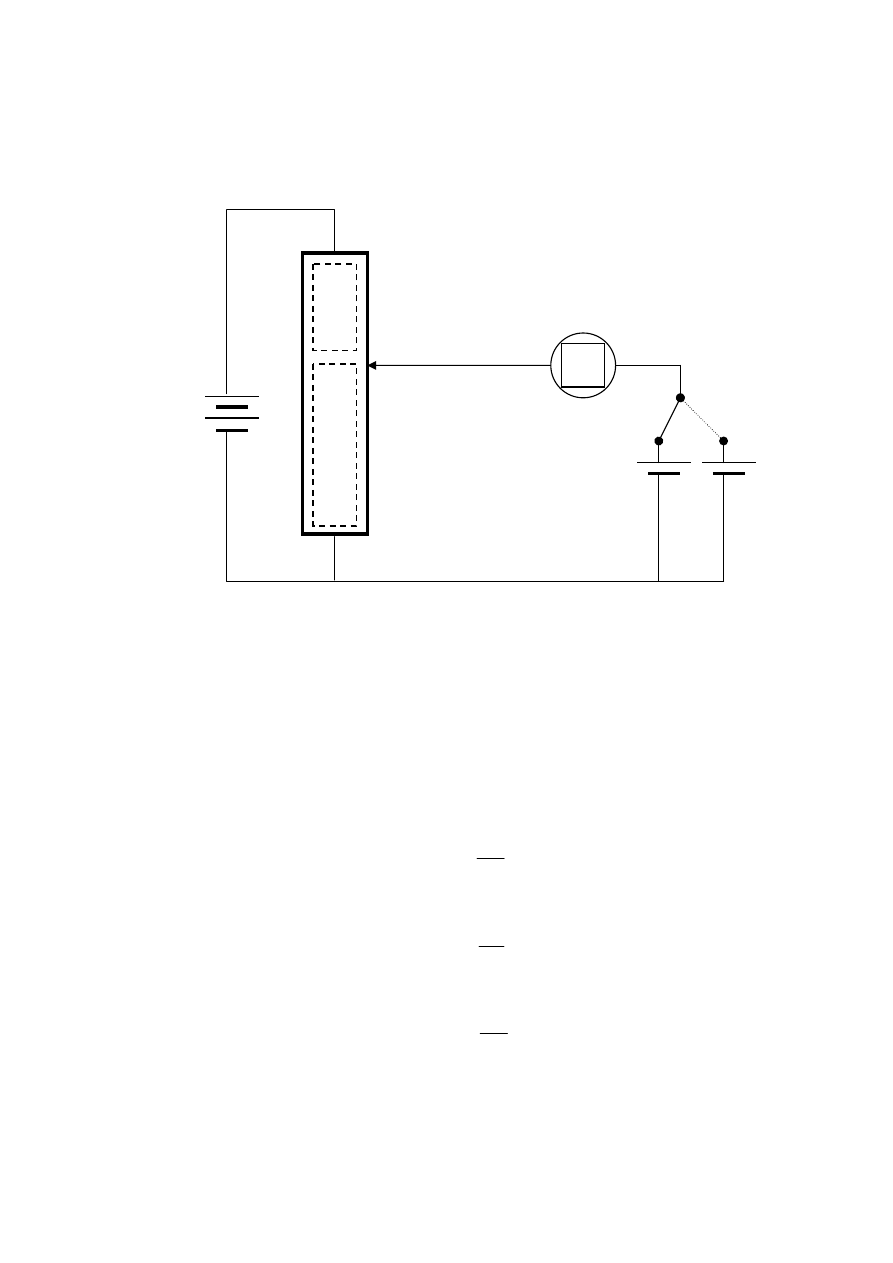
Rys. 15.3. Ilustracja metody kompensacyjno-porównawczej pomiaru napięcia
Inną metodą – bardziej dokładną – jest tzw. metoda kompensacyjno-porównawcza pomiaru
napięcia nie wymagająca znajomości wartości napięcia U zasilającego kompensator. Jest to
metoda porównawcza. Porównuje się siłę elektromotoryczną
ε
x
. z siłą elektromotoryczną
ogniwa wzorcowego ( w ćwiczeniu ogniwa Westona) o znanej wartości
ε
w
. Schemat układu
przedstawia rys. 15.3, a zasada pomiaru jest następująca:
a) przeprowadzamy kompensację układu z wzorcową siłą elektromotoryczną
ε
w
i otrzymu-
jemy wynik analogiczny jak w poprzednim przykładzie:
R
R
U
ε
w
w
=
(15.3)
b) przeprowadzamy kompensację układu z badaną siłą elektromotoryczną
ε
x
i stąd mamy:
R
R
U
ε
x
x
=
(15.4)
c) dzieląc stronami równania (15.3) i (15.4) otrzymujemy:
w
x
w
x
R
R
ε
ε
=
(15.5)
Z omówionych dwóch układów wynika, że podstawową rolę w kompensatorze odgrywa
dzielnik napięcia. Od precyzji jego wykonania zależy dokładność pomiaru.
G
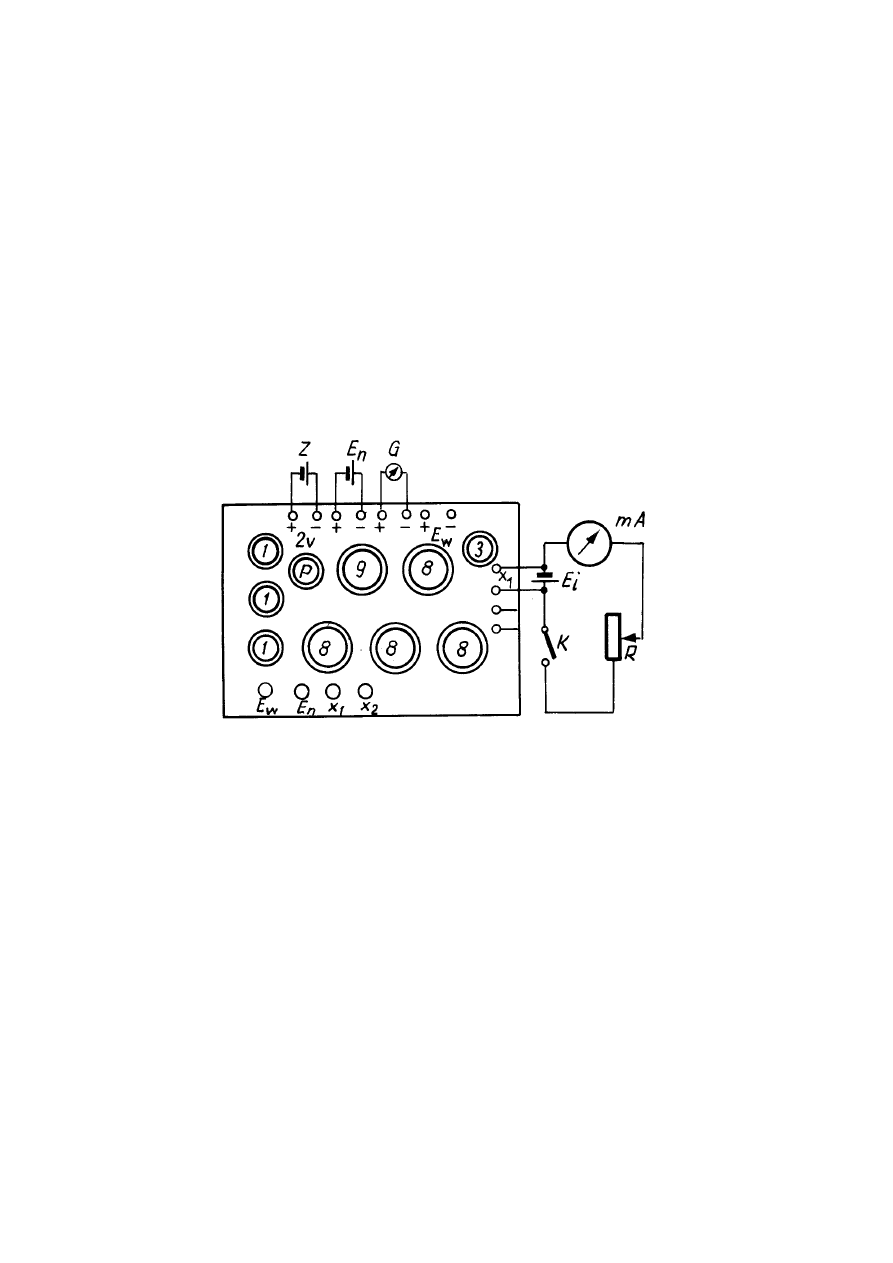
15.2. Opis układu pomiarowego
Układ do pomiaru siły elektromotorycznej i charakterystyki pracy źródła pokazano na
rys. 15.4. Kompensator KM76
znajduje się w skrzynce, z której dostępne są na zewnątrz po-
tencjometry i zaciski. Potencjometry (1) tworzą pomocniczy kompensator używany do
skompensowania napięcia na ogniwie wzorcowym, natomiast potencjometry (8), (9) to dziel-
nik napięcia. Potencjometrami (8), (9) kompensuje się napięcie na ogniwie badanym. Dodat-
kowy potencjometr (3) służy do kompensacji zmian temperaturowych rezystancji. Kompen-
sator KM76 zasilany jest napięciem o wartości 2 V ze źródła prądu stałego Z. Badane źródło
podłącza się do zacisków X1, ogniwo wzorcowe do zacisków oznaczonych E
n
, a galwano-
metr do zacisków oznaczonych przez G. Siła elektromotoryczna badanego źródła przewyższa
zakres pomiarowy kompensatora, w związku z tym nie mierzymy jej wprost, lecz przez
dzielnik napięcia DN8l. Mierzona siła elektromotoryczna jest równa wskazaniu kompensato-
ra pomnożonemu przez mnożnik L podany na dzielniku.
Rys.15.4. Układ do pomiaru siły elektromotorycznej i charakterystyki pracy źródła.
15.3. Przebieg pomiarów
A. P o m i a r s i ł y e l e k t r o m o t o r y c z n e j
1. Połączyć układ zgodnie ze schematem na rys. l5.3.
2. Ustawić napięcie 2 V na zaciskach kompensatora za pomocą zasilacza prądu stałego
(patrz rys.15.4).
3. Wyregulować natężenie prądu pomocniczego. W tym celu przy włączonym przycisku En
układu kompensatora pomocniczego, za pomocą kolejnych dekad (1), poczynając od naj-
większej, sprowadzić wychylenie galwanometru do zera.
4. Zmierzyć siłę elektromotoryczną E
i
badanego źródła przy otwartym wyłączniku K (patrz
rys. 15.4). W tym celu przy włączonym zacisku X1 wykonać czynności związane z kompen-
sacją układu za pomocą dekad (8) i (9) postępując w taki sposób, jak przy kompensacji
pomocniczej.
5. Po uzyskaniu kompensacji badanego źródła ponownie włączyć układ pomocniczy (przy-
ciskiem E
n
) i skontrolować czy układ ten jest nadal skompensowany. W przypadku stwier-
dzenia wychylenia galwanometru, po włączeniu obwodu kompensatora pomocniczego, po-

wtórzyć wszystkie czynności związane z pomiarem, tzn. czynności jak w pkt. 3 i 4. Mierzona
wartość
ε
x
jest równa wskazaniu kompensatora E
i
i pomnożonemu przez mnożnik L podany
na dzielniku.
6. Czynności w pkt. 3-5 powtórzyć niezależnie dziesięciokrotnie.
B. C h a r a k t e r y s t y k a p r a c y ź r ó d ł a
1. Nastawić maksymalną wartość rezystancji R. Włączyć prąd kluczem K. Regulując rezy-
stancją R ustawić wartość prądu płynącego przez badane źródło na 0,5 mA i zmierzyć napię-
cie U na zaciskach źródła w sposób analogiczny do opisanego w punktach 3-5 części A.
2. Czynności według pkt. 1 powtórzyć dla co najmniej pięciu różnych wartości prądu,
zwiększając stopniowo prąd o 0,5 mA. Nie przekraczać prądu 3 mA.
15.4. Opracowanie wyników pomiarów
A. P o m i a r s i ł y e l e k t r o m o t o r y c z n e j
1. W tym ćwiczeniu mamy do czynienia z błędami przypadkowymi. W pierwszej części ćwi-
czenia dokonano 10-krotnego pomiaru
ε
x
. Ta ilość pomiarów jest wystarczająca, żeby błędy
oceniać zgodnie z rozkładem normalnym:
a) wyznaczyć
śr
ε
'
b) obliczyć średni błąd kwadratowy wartości średniej
śr
ε
σ
B. C h a r a k t e r y s t y k a p r a c y ź r ó d ł a
1. Na podstawie wyników pomiarów wykreślić zależność mierzonego napięcia U od natęże-
nia czerpanego prądu (patrz wzór 15.1).
2. Z nachylenia wykreślonej prostej wyznaczyć rezystancję wewnętrzną.
3. Sprawdzić zgodność wyniku otrzymanego z przecięcia prostej z osią U z wynikiem bez-
pośredniego pomiaru.
4. Obliczyć dla wszystkich punktów pomiarowych moc czerpaną ze źródła
I
U
P
Z
=
oraz moc wydzieloną na rezystancji wewnętrznej źródła:
(
)
I
U
ε
P
w
R
−
=
5. Wykreślić na wspólnym arkuszu zależność P
Z
i P
Rw
od I z wynikiem teoretycznym:
w
2
Z
R
I
-
I
P
ε
=
w
2
R
R
I
P
w
=
6. Omówić wyniki i przedstawić wnioski dotyczące sposobu prawidłowego wykorzystania
badanego źródła.

15.5. Pytania kontrolne
1. Sformułować I i II prawo Kirchhoffa.
2. Na czym polega metoda kompensacyjna pomiaru siły elektromotorycznej?.
3. Zasada działania kompensatora napięcia.
4. Wyznaczenie rezystancji ogniwa.
L i t e r a t u r a
[1] Piekara A.: Elektryczność i magnetyzm. PWN, Warszawa 1970.
[2] Szczeniowski S.: Fizyka doświadczalna, cz. III. Elektryczność i magnetyzm. PWN,
Warszawa 2966.
[3] Łapiński M.: Miernictwo elektryczne. PWN Warszawa 1974
Wyszukiwarka
Podobne podstrony:
Pomiar siły elektromotorycznej ogniwa, Akademia Morska Szczecin, SEMESTR II, Fizyka, I semestr
(1) Pomiar siły elektromotorycznej ogniwa
Pomiar siły elektromotorycznej i oporu wewnętrznego ogniwa metodą kompensacji, Politechnika Częstoch
Elek- Pomiar siły elektromotor i oporu wewnętrznego ogniwa, Sprawozdania - Fizyka
raporty, teoria1, Celem zadania jest pomiar siły elektromotorycznej SEM generowanej w ogniwie organi
zastosowanie pomiaru siły elektromotorycznej ogniw galwanicznych 6VUXUCM3KCOLGMFGP3ULXZFJMGULSLOWTSQ
Pomiar siły elektromotorycznej doc
fiz20-ad, Wynikiem działania siły na elektron będzie zakrzywienie jego toru w płaszczyznie prostopad
Pomiary wielkości elektrycznych Instrukcja do ćw 05 Badanie diody – charakterystyka prądowo napięc
elektroenergetykacykl1 Ogniwa P Nieznany
KARTA, KARTA ZAGROŻEŃ I CHARAKTERYSTYKA STANOWISKA PRACY
KARTA, KARTA ZAGROŻEŃ I CHARAKTERYSTYKA STANOWISKA PRACY
Suwnica elektryczna z kabiną, Instrukcje-Bezpiecznej Pracy
KARTA, KARTA ZAGROŻEŃ I CHARAKTERYSTYKA STANOWISKA PRACY
Kompleksowa interpretacja pomiarów magnetycznych i elektrooporowych nad intruzjami diabazów w Miękin
B2 Wyznaczanie siły elektromotorycznej i oporu wewnętrznego
Pomiar przenikalności elektrycznej i współczynnika strat dielektrycznych tg dielektryków stałychx
więcej podobnych podstron