MECHANIKA TEORETYCZNA
Temat nr 4
Analiza geometrycznej niezmienności płaskich
układów tarcz sztywnych
Magdalena Łasecka-Plura
Tarcza sztywna – podstawowe pojęcie stosowane w analizie
geometrycznej.
1. Nieskończenie cienki plaster wycięty z bryły sztywnej
2. Odległość dwóch punktów tarczy nie zmienia się
niezależnie od działających na to ciało obciążeń.
A
B
L
3. Tarcza sztywna i obciążenia na nią działające leżą w jednej
płaszczyźnie.
4. Przy większej liczbie tarcz sztywnych układ taki nazywany
jest płaskim układem tarcz sztywnych.
A
B
L
P
2
P
3
P
4
P
1
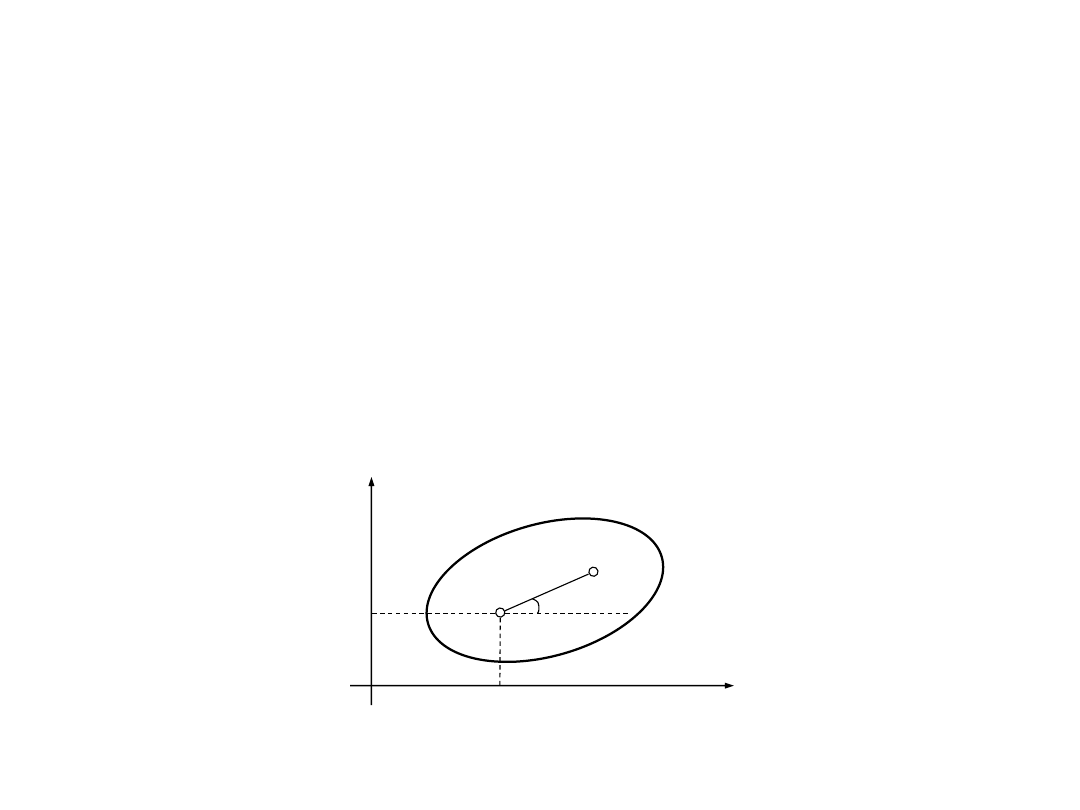
Stopień swobody – niezależny parametr, za pomocą którego
opisywane jest położenie ciała na płaszczyźnie.
Ich liczba określa liczbę stopni swobody tarczy sztywnej.
Położenie tarczy sztywnej określa położenie dowolnego
odcinka AB:
- dwie współrzędne punktu A (x
a
i y
a
),
- kąt
a
, który jest kątem nachylenia odcinka AB.
A
B
a
x
A
y
A
Y
X

Tarcza sztywna posiada na płaszczyźnie 3 stopnie swobody –
może wykonywać trzy rodzaje ruchu:
- ruch po kierunku osi X,
- ruch po kierunku osi Y,
- obrót na płaszczyźnie XY.

Konstrukcja budowlana musi mieć odebrane wszystkie
stopnie swobody, aby nie była mechanizmem i nie zmieniała
położenia pod wpływem obciążenia.
Stopnie swobody odebrane są za pomocą więzów, które
przymocowują tarczę sztywną do nieruchomej tarczy
podporowej.
Tarczę podporową stanowić może podłoże gruntowe lub inna
konstrukcja.
RODZAJE WIĘZÓW
Pręt podporowy
Pręt podporowy odbiera tarczy 1 stopień swobody.
s = 2
p = 1
TP
A
B
B’
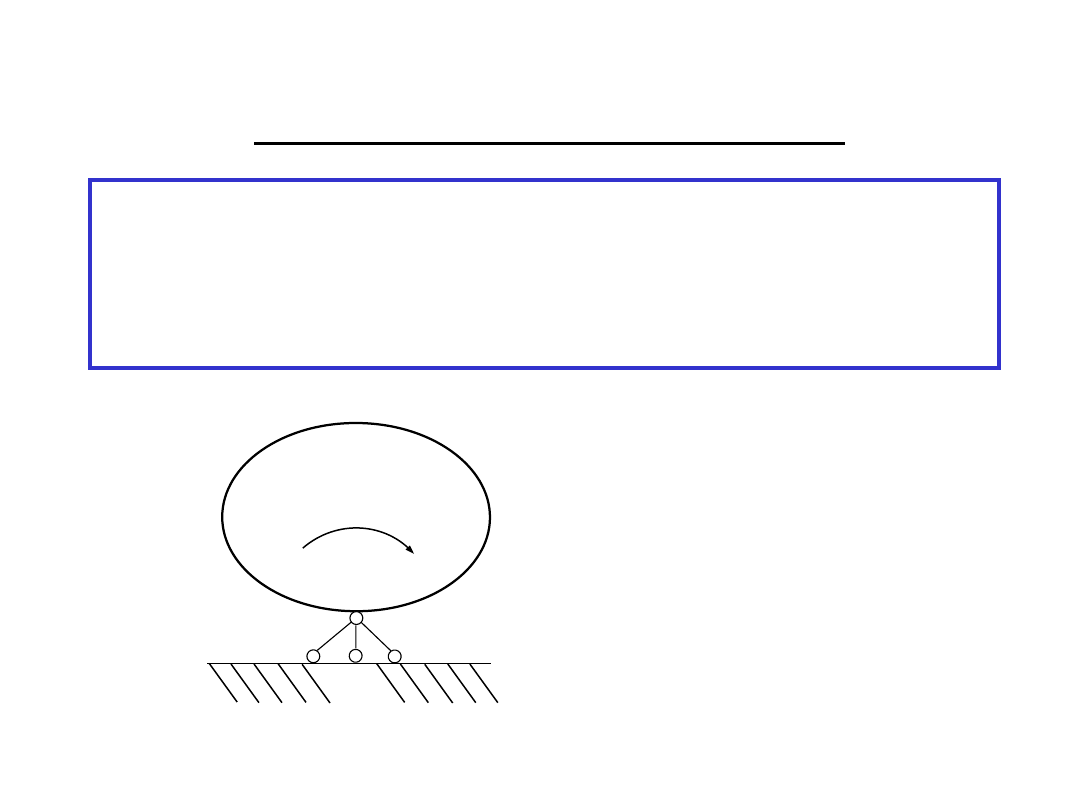
Przegub rzeczywisty (przegub)
Pozwala tarczy sztywnej tylko na obrót wokół niego.
Przegub rzeczywisty odbiera tarczy 2 stopnie swobody.
s = 1
p = 2
TP
A
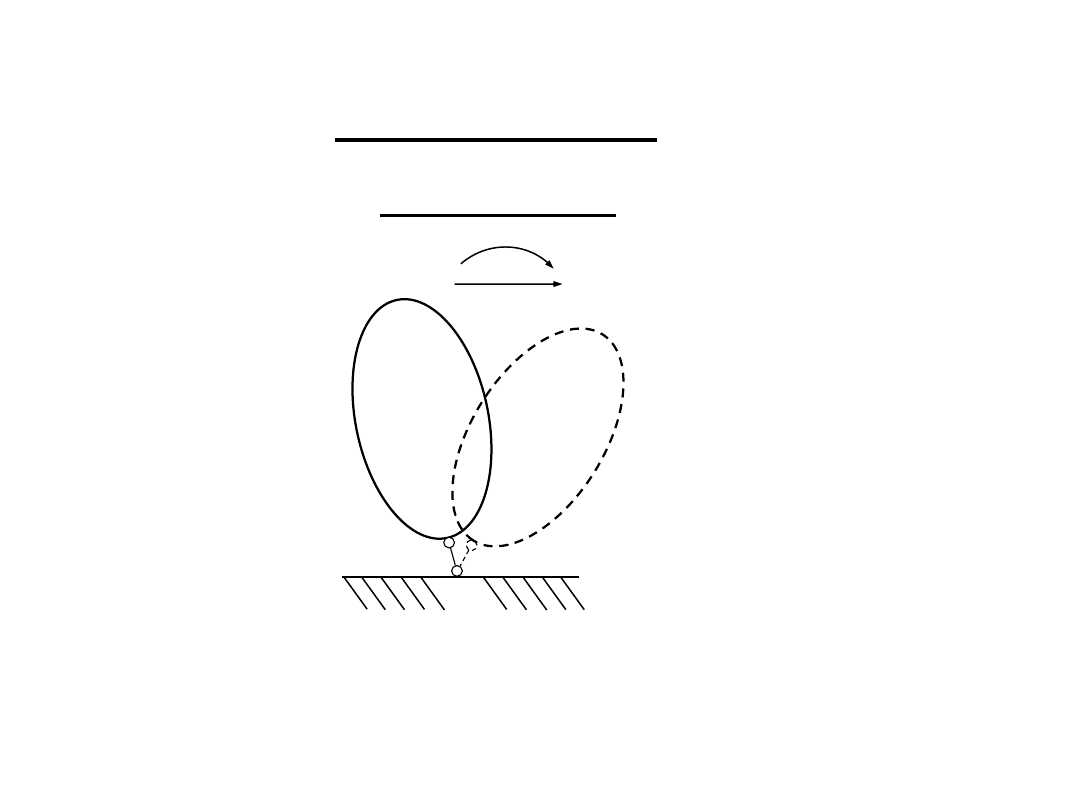
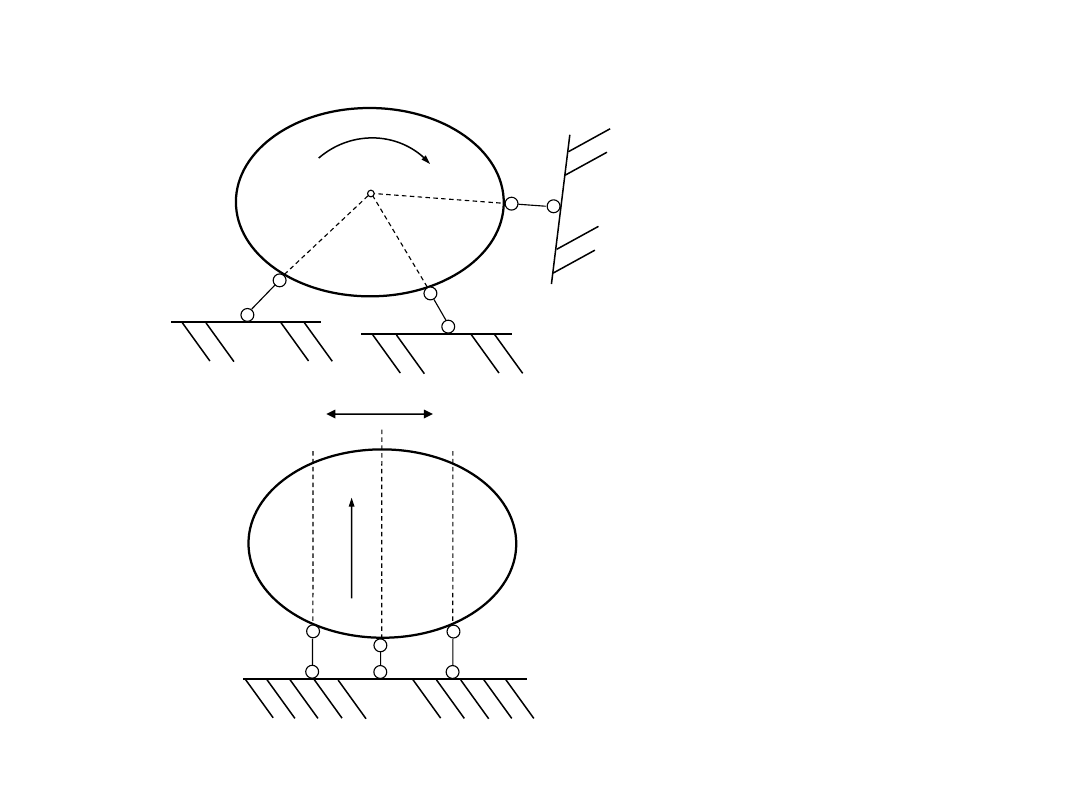
Przegub fikcyjny
Przegub utworzony z dwóch nierównoległych prętów, który
będzie znajdował się w punkcie przecięcia tych prętów.
Przegub fikcyjny odbiera tarczy 2 stopnie swobody.
s = 1
p = 2
TP
1
2
O
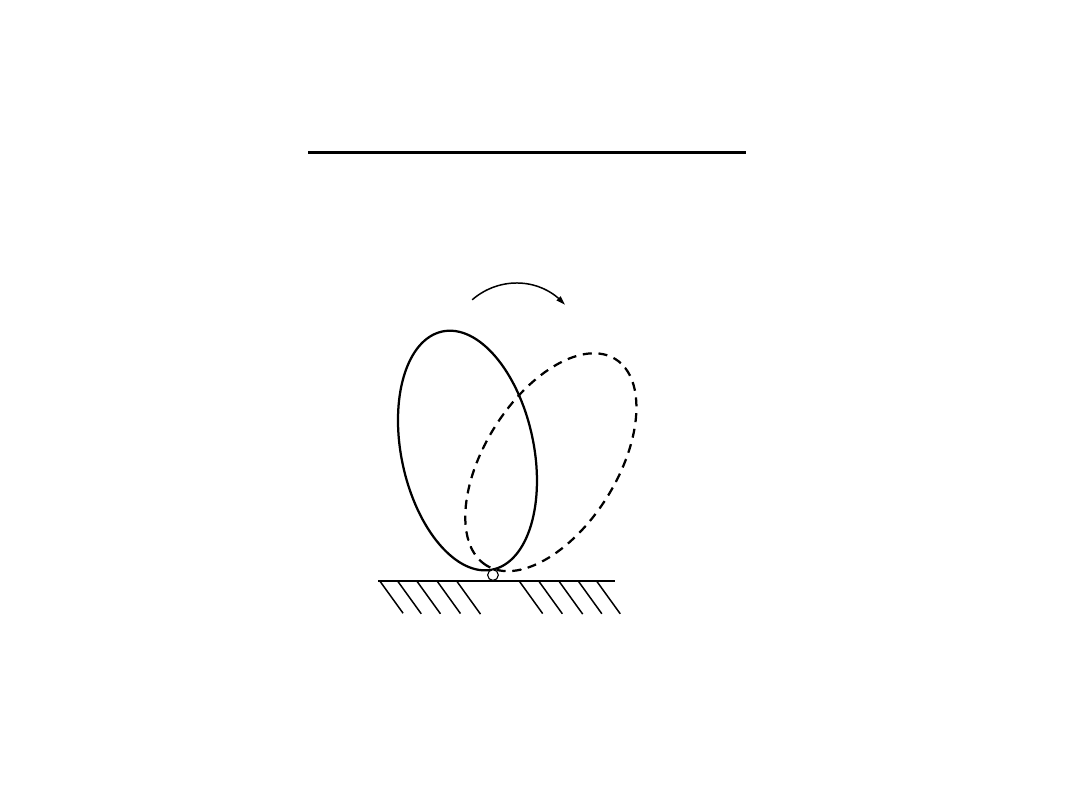
Przegub niewłaściwy
Przegub utworzony z dwóch równoległych prętów, który
znajduje się w nieskończoności, na prostej równoległej do
kierunku tych prętów.
Przegub niewłaściwy odbiera tarczy 2 stopnie swobody.
TP
1
2
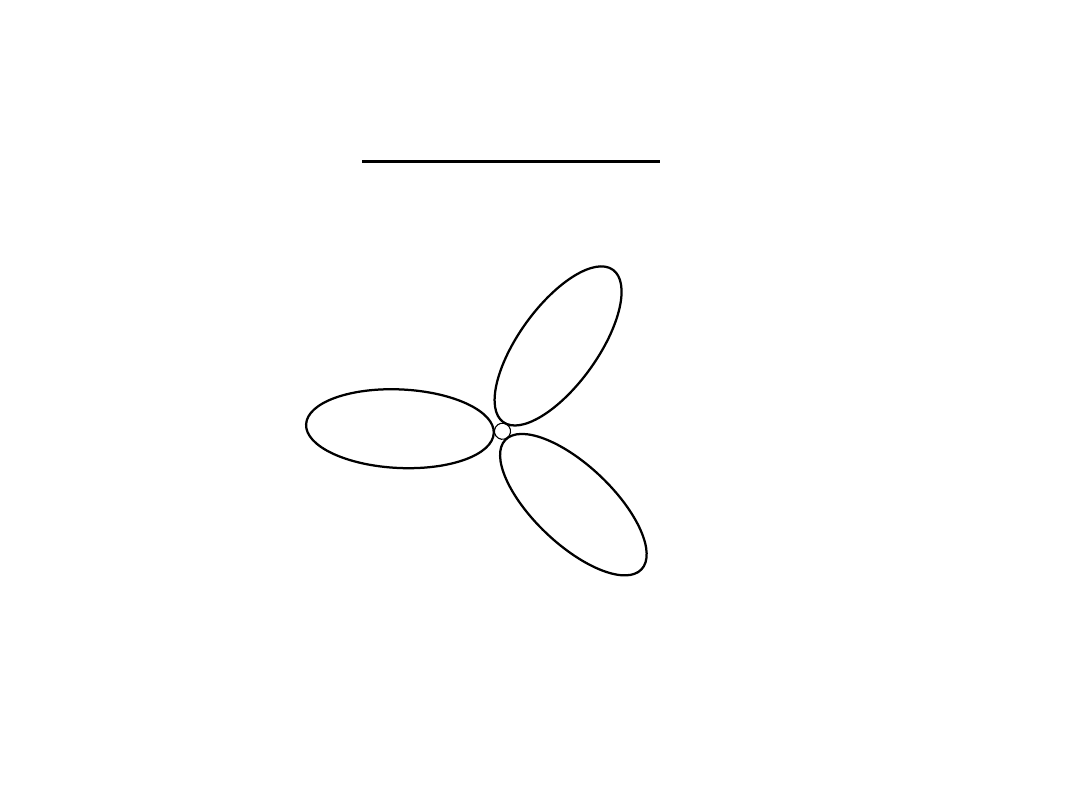
Przegub wielokrotny
Przegub łączący więcej niż dwie tarcze sztywne.
Jeżeli przegub wielokrotny łączy t tarcz sztywnych to
odpowiada on 2(t-1) prętom podporowym.
A
I
II
III
Klasyfikacja układów tarcz sztywnych pod względem
kinematycznym
1. Geometrycznie zmienny
(układ nie jest pozbawiony wszystkich stopni swobody)
TP
1
2
O
2. Geometrycznie niezmienny
(układ jest pozbawiony wszystkich stopni swobody)
TP
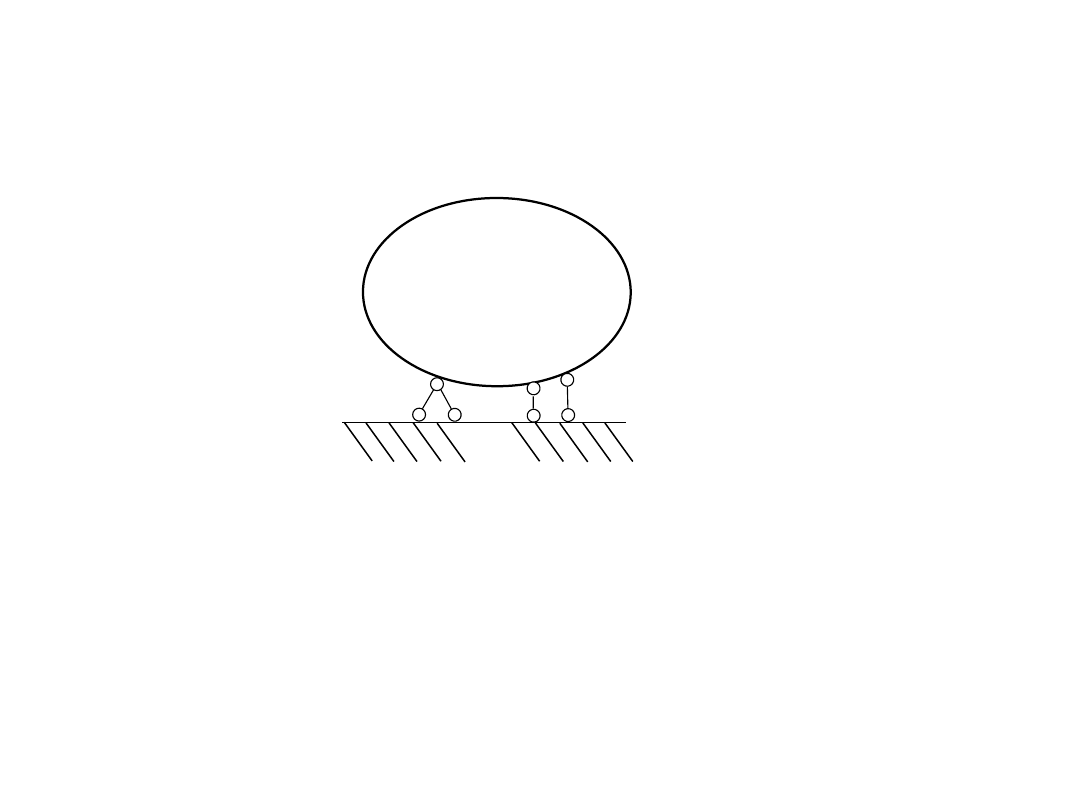
3. Geometrycznie niezmienny przesztywniony
TP
WARUNKI GEOMETRYCZNEJ NIEZMIENNOŚCI
Warunek konieczny
3t = p
t – liczba tarcz
p – liczba więzów
3t > p – układ geometrycznie zmienny
3t = p – układ geometrycznie niezmienny (statycznie
wyznaczalny)
3t < p – układ geometrycznie niezmienny (statycznie
niewyznaczalny)
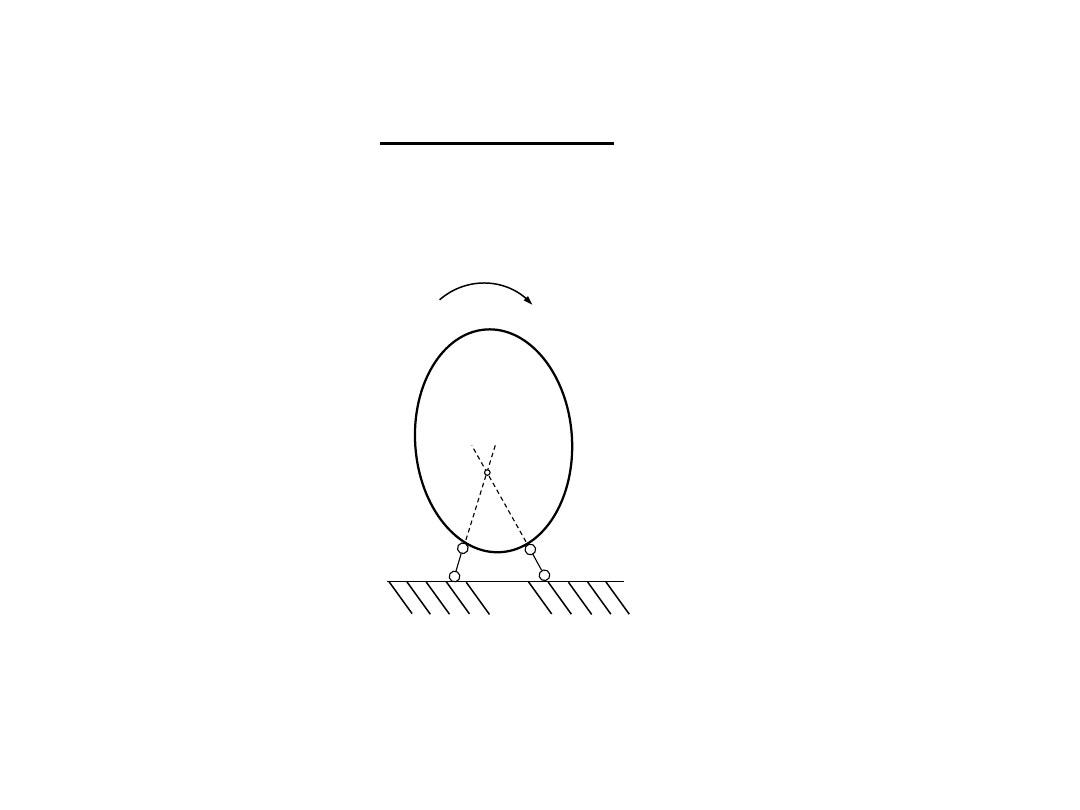
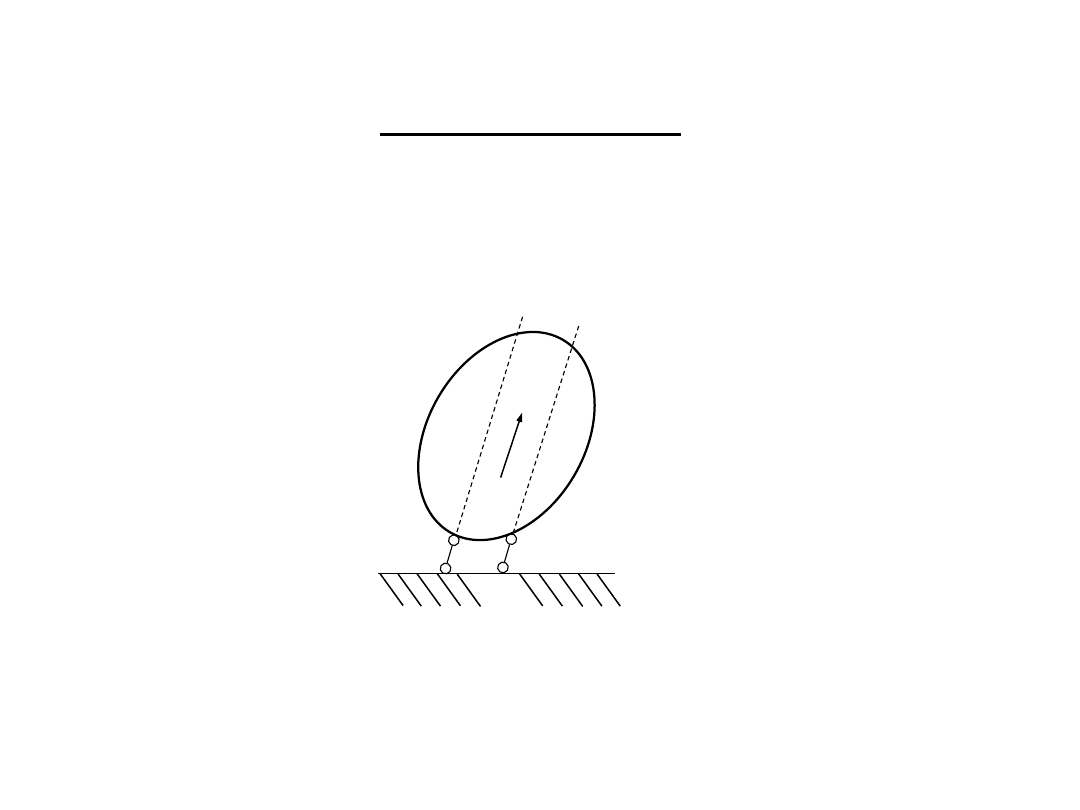
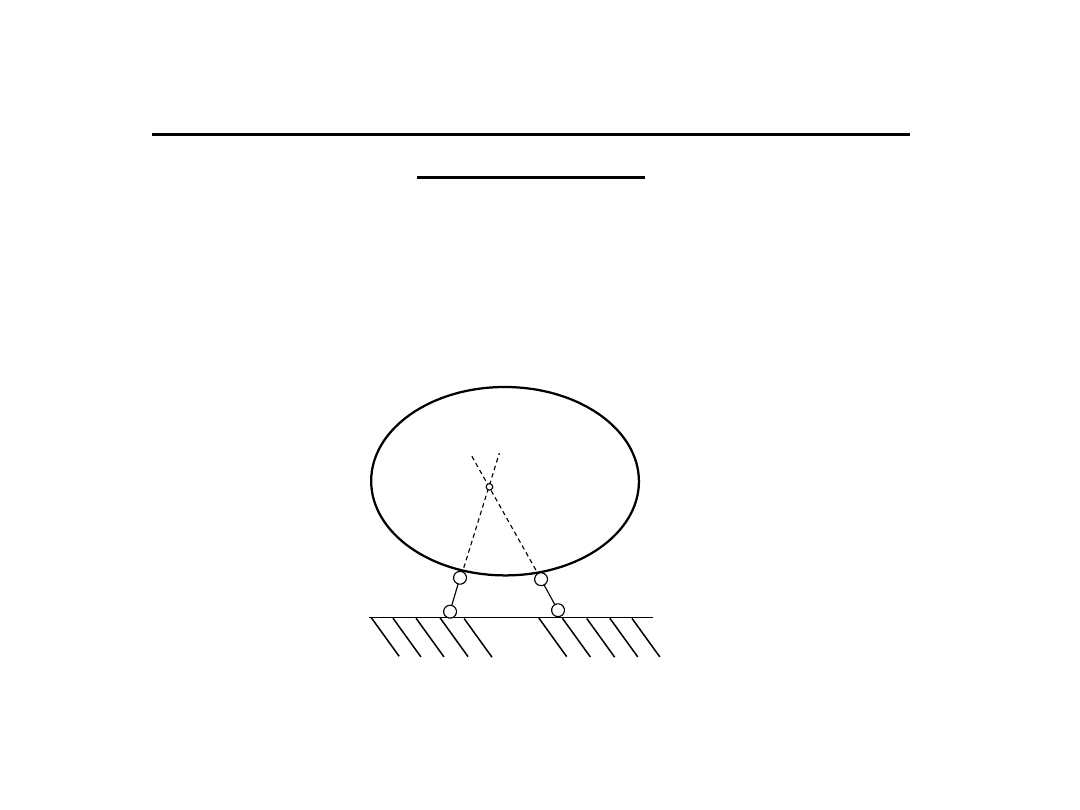
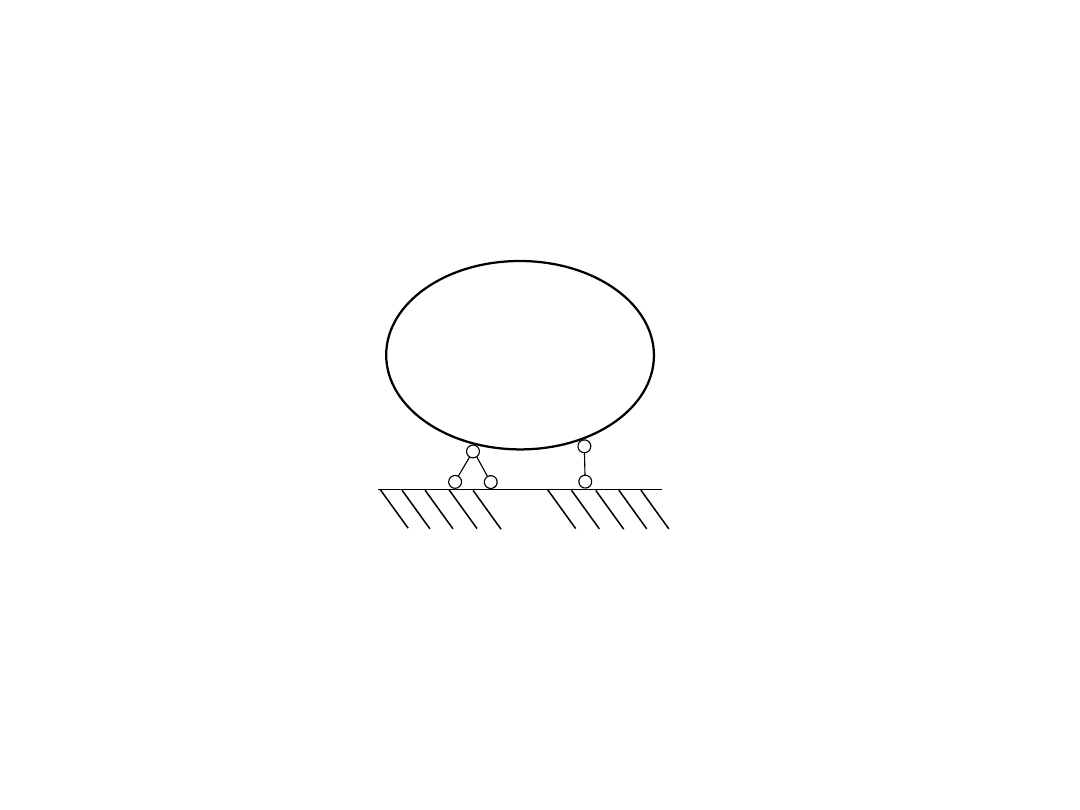
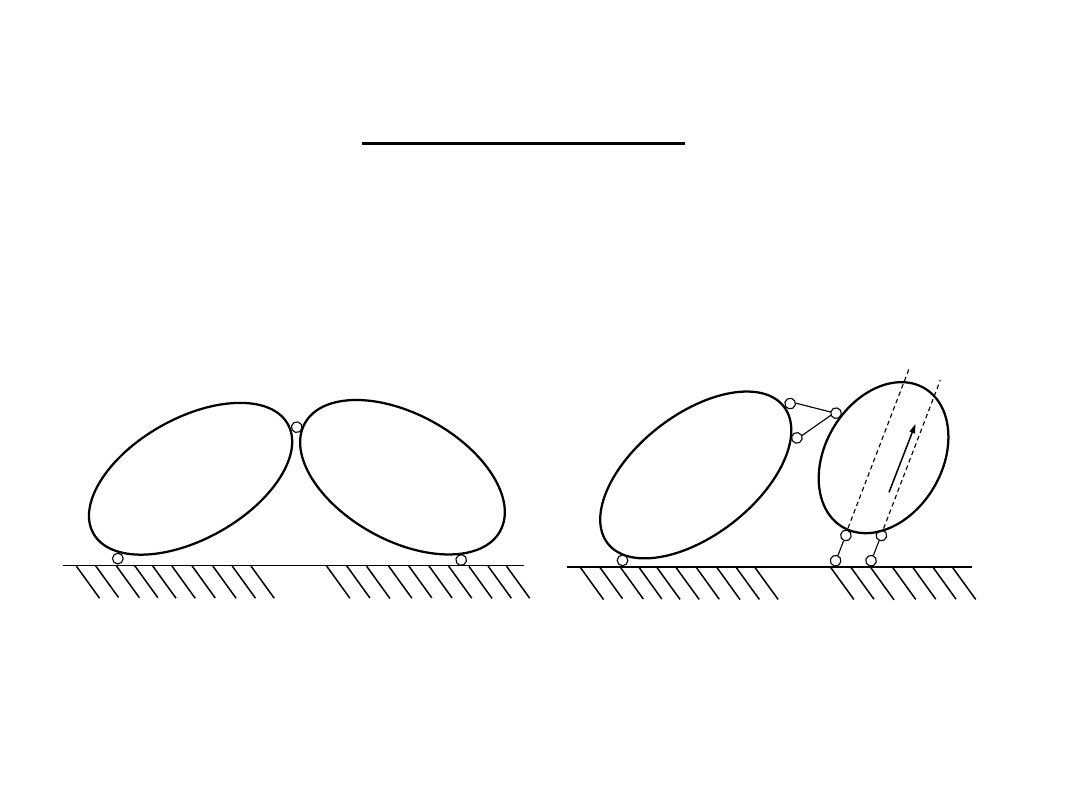
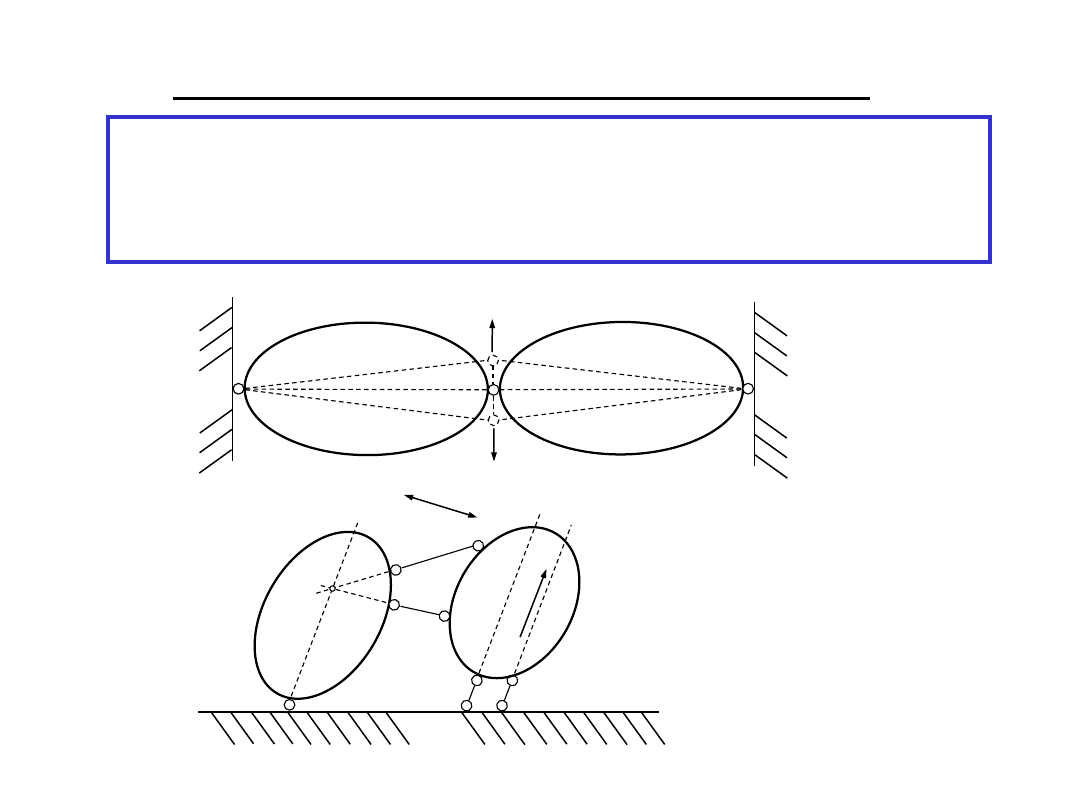
Warunek dostateczny pojedynczej tarczy
Warunek dostateczny geometrycznej niezmienności
pojedynczej tarczy sztywnej połączonej z tarczą podporową
lub inną tarczą sztywną trzema więzami jest spełniony, jeżeli
ich kierunki nie przecinają się w jednym punkcie.
TP
Warunek dostateczny
nie jest spełniony
TP
1
TP
2
TP
3
1
2
3
TP
O
Warunek dostateczny
nie jest spełniony
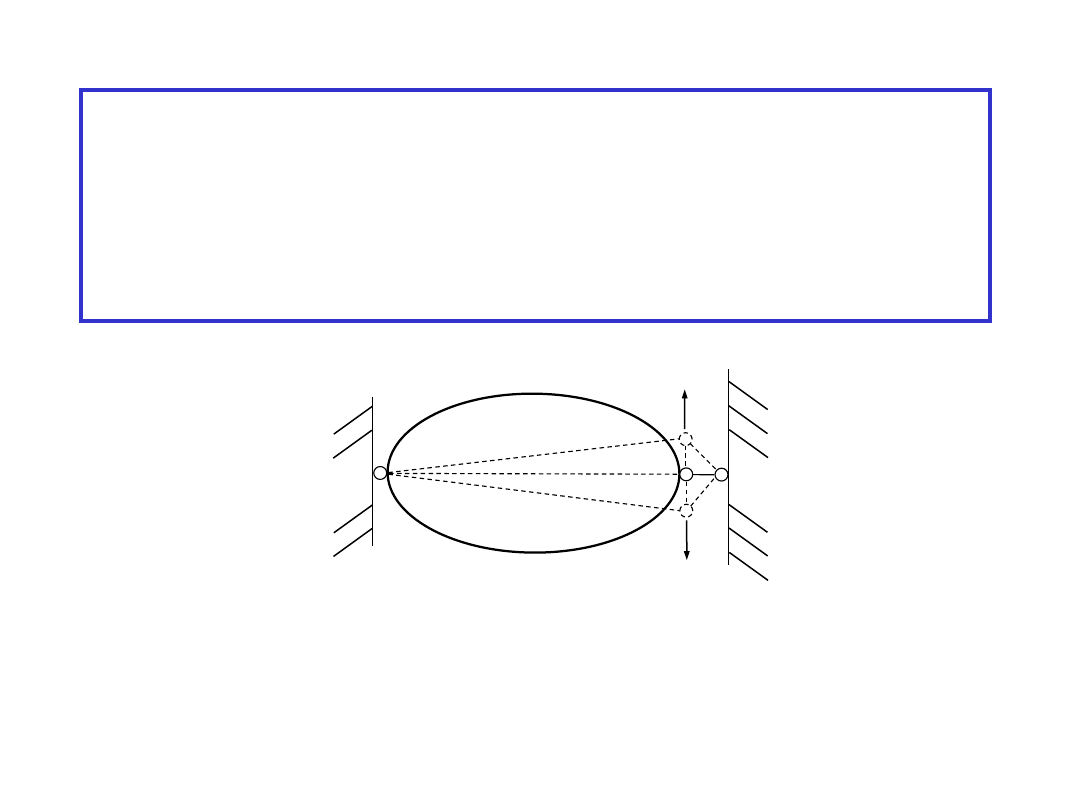
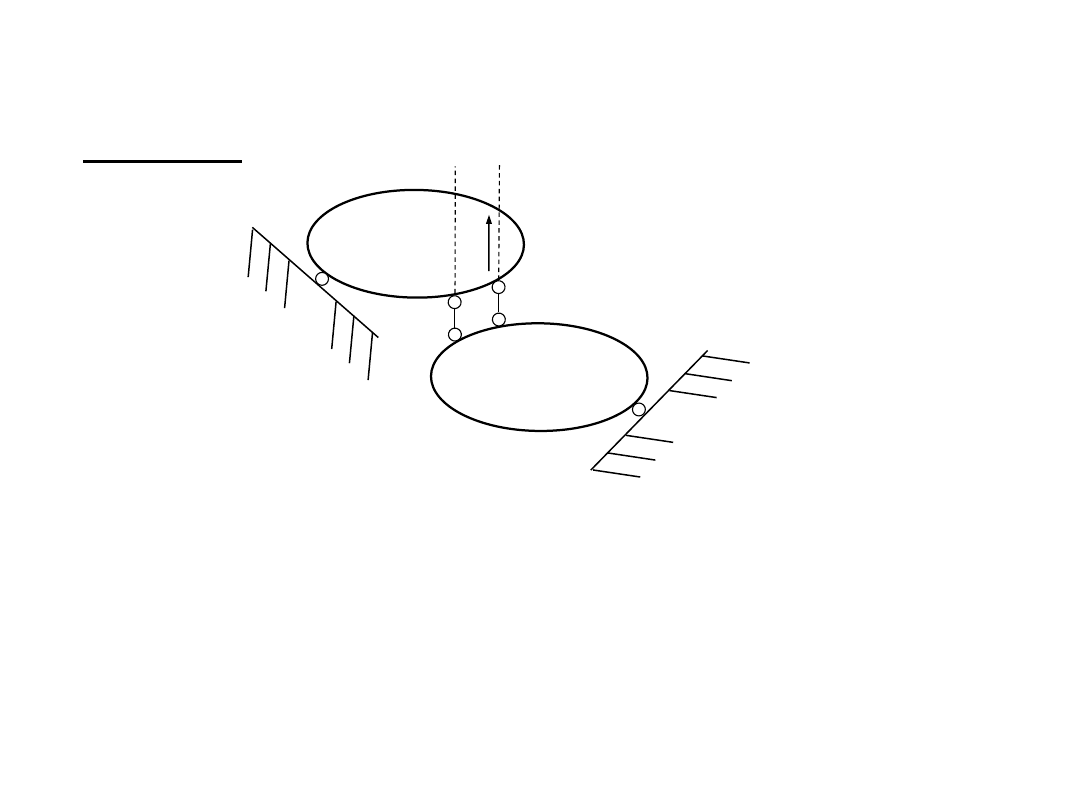
Warunek dostateczny geometrycznej niezmienności
pojedynczej tarczy sztywnej połączonej z tarczą podporową
lub inną tarczą sztywną jednym prętem podporowym i
przegubem jest spełniony, jeżeli przegub nie leży na kierunku
pręta.
TP
TP
A
B
Warunek dostateczny
nie jest spełniony
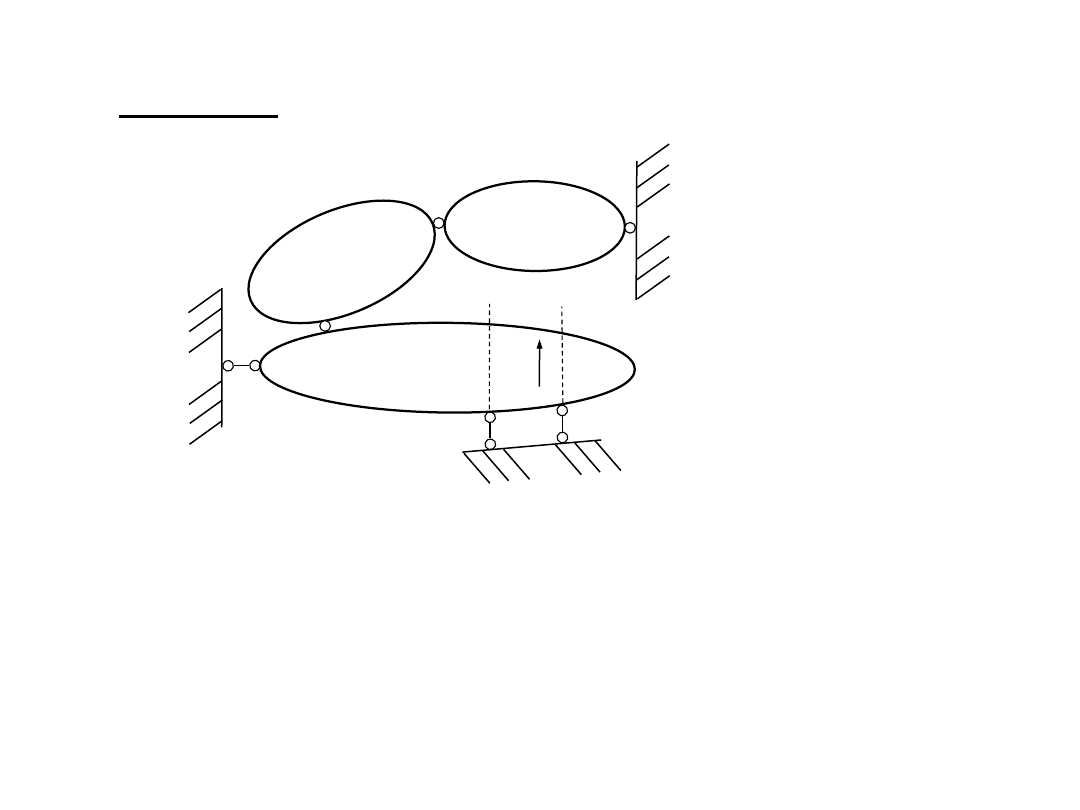
Układ trójprzegubowy
Układ trójprzegubowy to układ dwóch tarcz połączonych ze
sobą dowolnym przegubem, z których każda jest połączona z
tarczą podporową dowolnym przegubem.
TP
I
II
II
C
TP
B
I
A
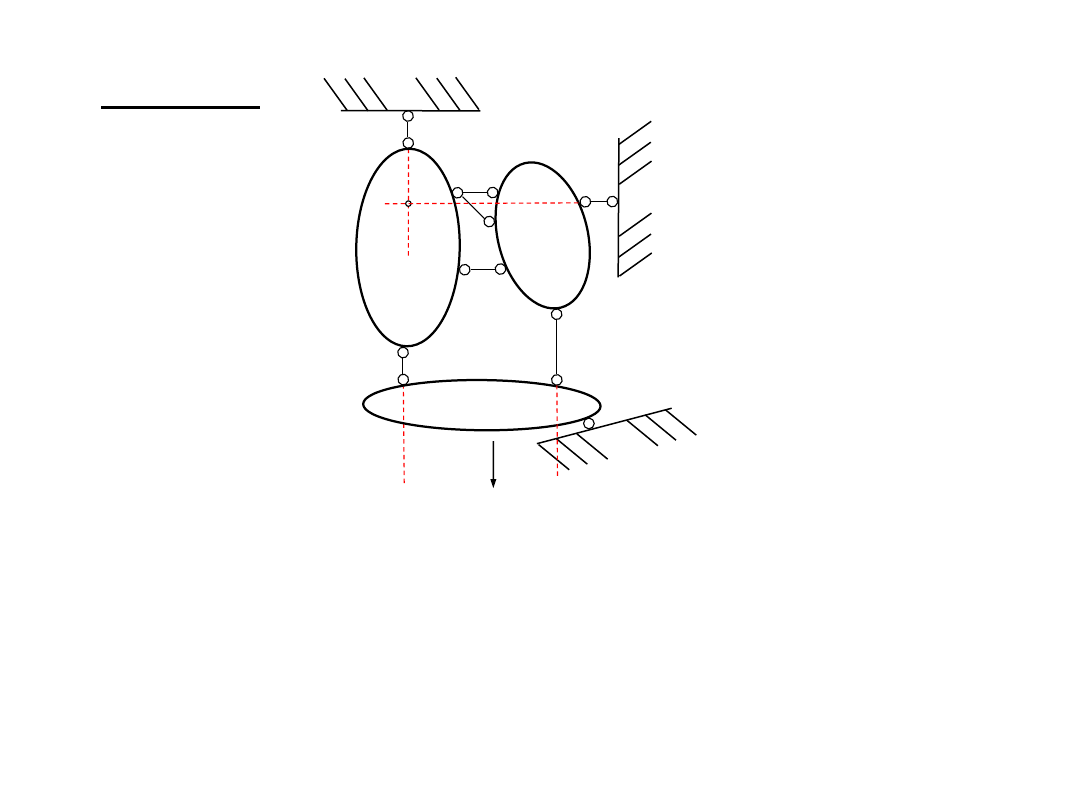
Warunek dostateczny układu trójprzegubowego
Warunek dostateczny geometrycznej niezmienności
układu trójprzegubowego jest spełniony, jeżeli trzy
przeguby nie leżą na jednej prostej.
TP
TP
A
B
C
TP
II
C
A
B
I
1
2
Warunek dostateczny
nie jest spełniony
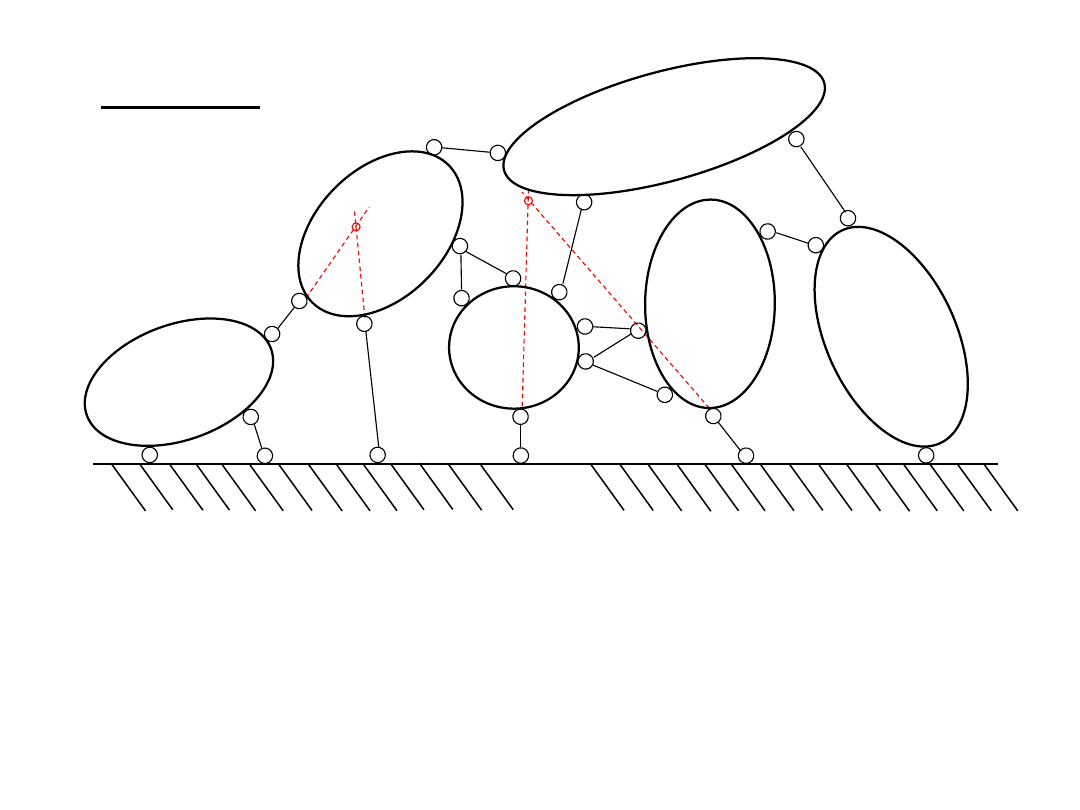
Zadanie: Sprawdzić geometryczną niezmienność układu tarcz
Sposób postępowania:
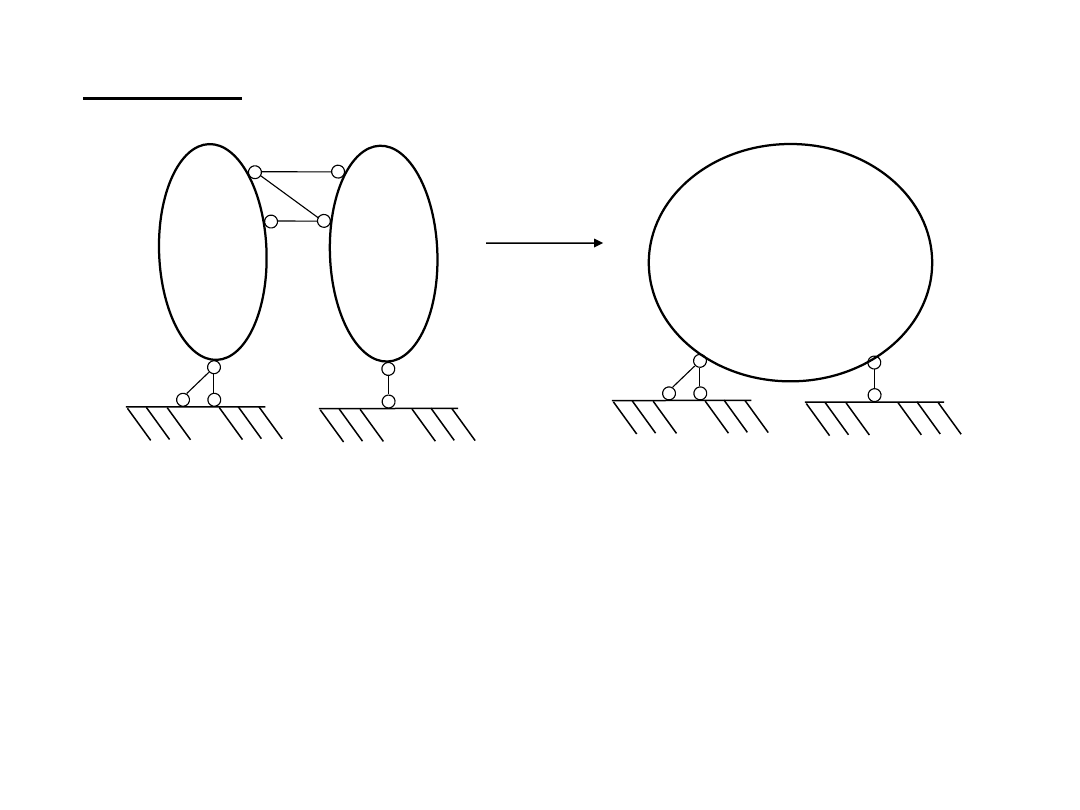
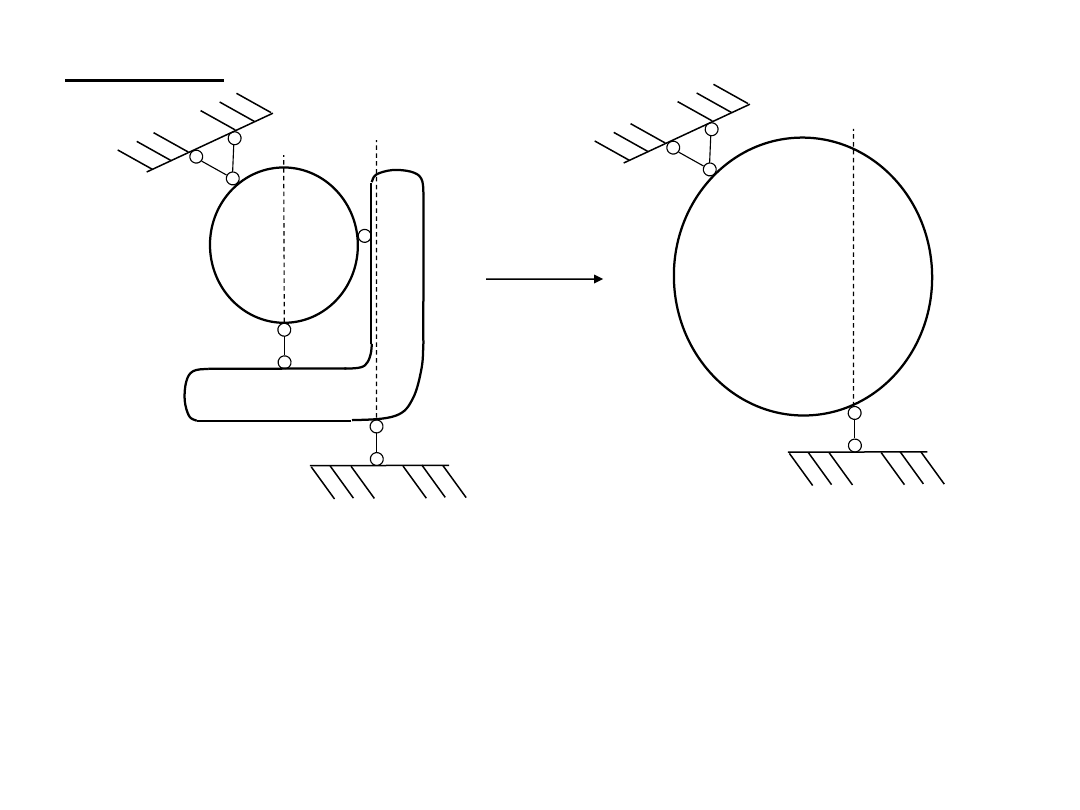
1. Sprawdzić czy występuje w układzie tarcza zastępcza (dwie
tarcze połączone trzema prętami).
2. Sprawdzić czy występuje układ trójprzegubowy.
3. Sprawdzić czy występuje tarcza podparta trzema prętami
lub przegubem i prętem.
Przykład 1:
warunek dostateczny:
układ trójprzegubowy
TP
TP
(1,2)
3
4
(5,6)
A
B
C
I
II
warunek konieczny:
t = 2
p = 6
3t = p
Przykład 2:
TP
TP
1
2
3
4
5
6
I
II
warunek dostateczny:
1. tarcza zastępcza
2. tarcza podparta trzema
prętami
warunek konieczny:
t = 2
p = 6
3t = p
I+II
TP
TP
1
2
6
Przykład 3:
1
2
3
(4,5)
6
I
II
TP
TP
A
warunek dostateczny:
1. tarcza zastępcza
2. tarcza podparta trzema
prętami
warunek konieczny:
t = 2
p = 6
3t = p
I+II
1
2
6
TP
TP
(2,3)
1
8
(4,5)
A
B
C
TP
TP
TP
(6,7)
9
I
II
III
D
Przykład 4:
warunek dostateczny:
1. tarcza podparta trzema
prętami
2. układ trójprzegubowy
warunek konieczny:
t = 3
p = 9
3t = p
Przykład 5:
B
(8,9)
1
2
A
C
I
II
III
TP
TP
TP
3
4
5
6
7
warunek dostateczny:
1. tarcza zastępcza (I+II)
2. układ trójprzegubowy
(A,B,C)
warunek konieczny:
t = 3
p = 9
3t = p
Przykład 6:
I
II
III
IV
V
VI
(1,2)
3
4
5
6
11
10
9
(7,8)
12
13
14
15
16
17
18
B
A
C
D
TP
warunek konieczny:
t = 6
p = 18
3t = p
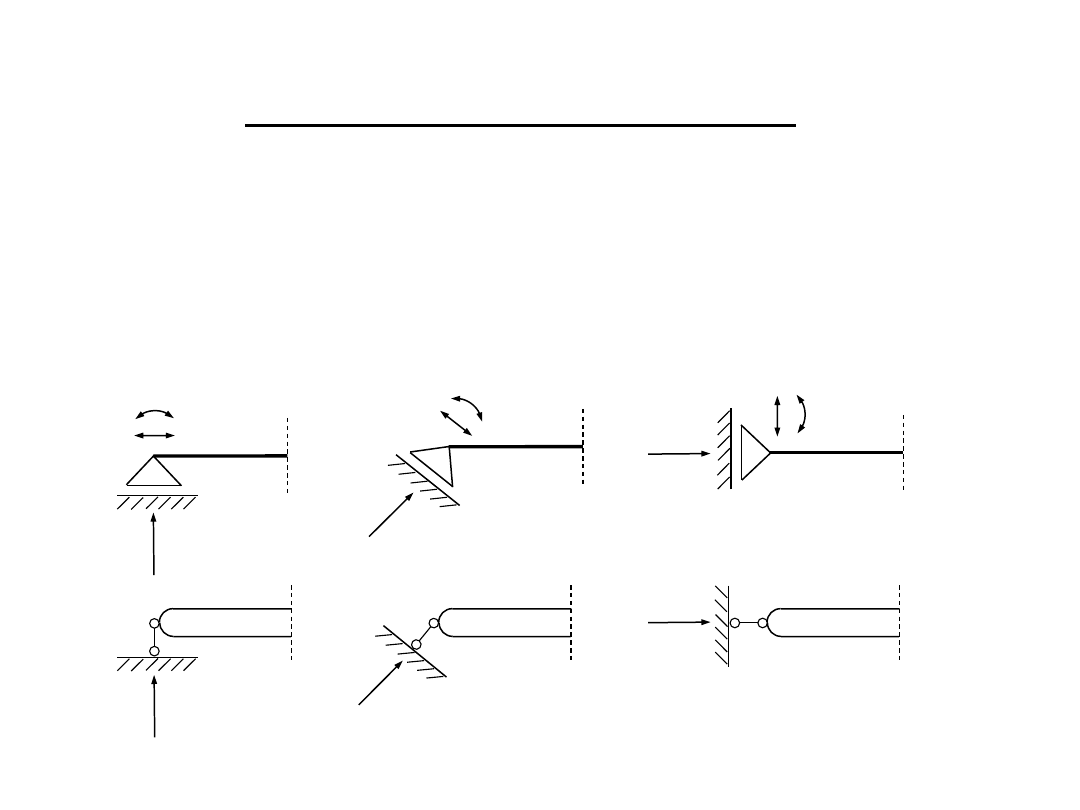
Więzy w płaskich układach prętowych
Rodzaje podpór:
1. podpora przegubowo-przesuwna
R
1
R
1
R
1
R
1
R
1
R
1
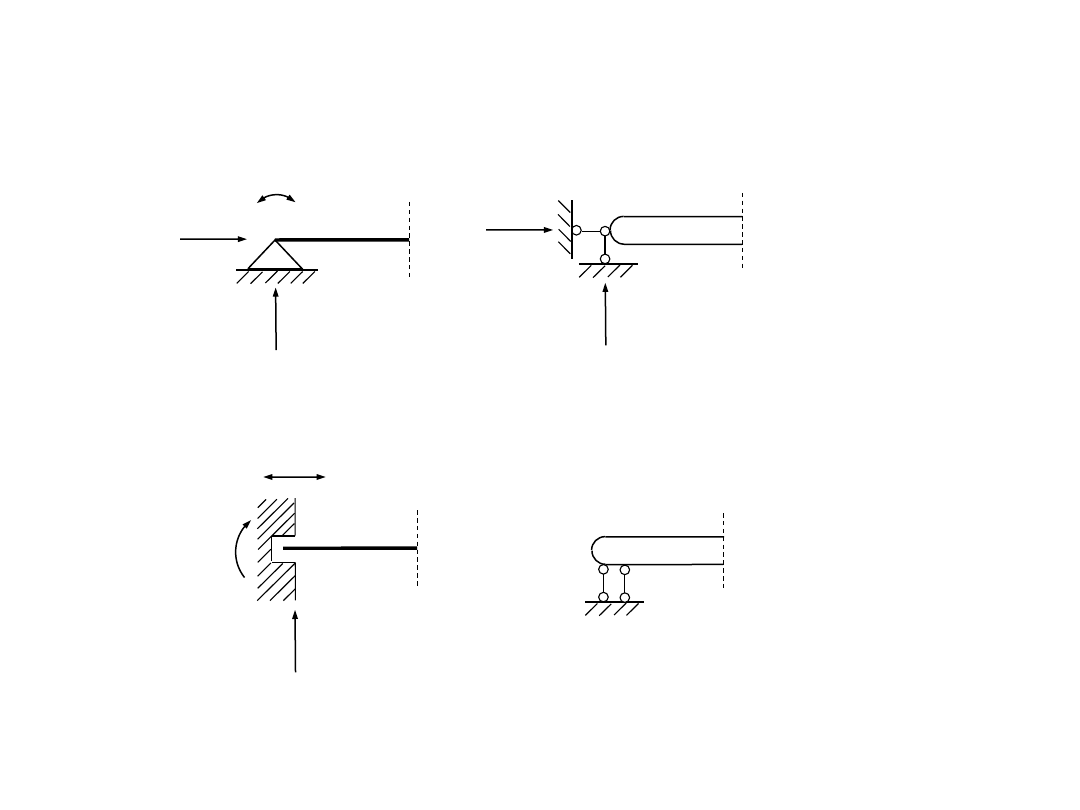
2. Podpora przegubowo-nieprzesuwna
3. podpora teleskopowa
R
2
R
1
R
2
R
1
R
1
R
2
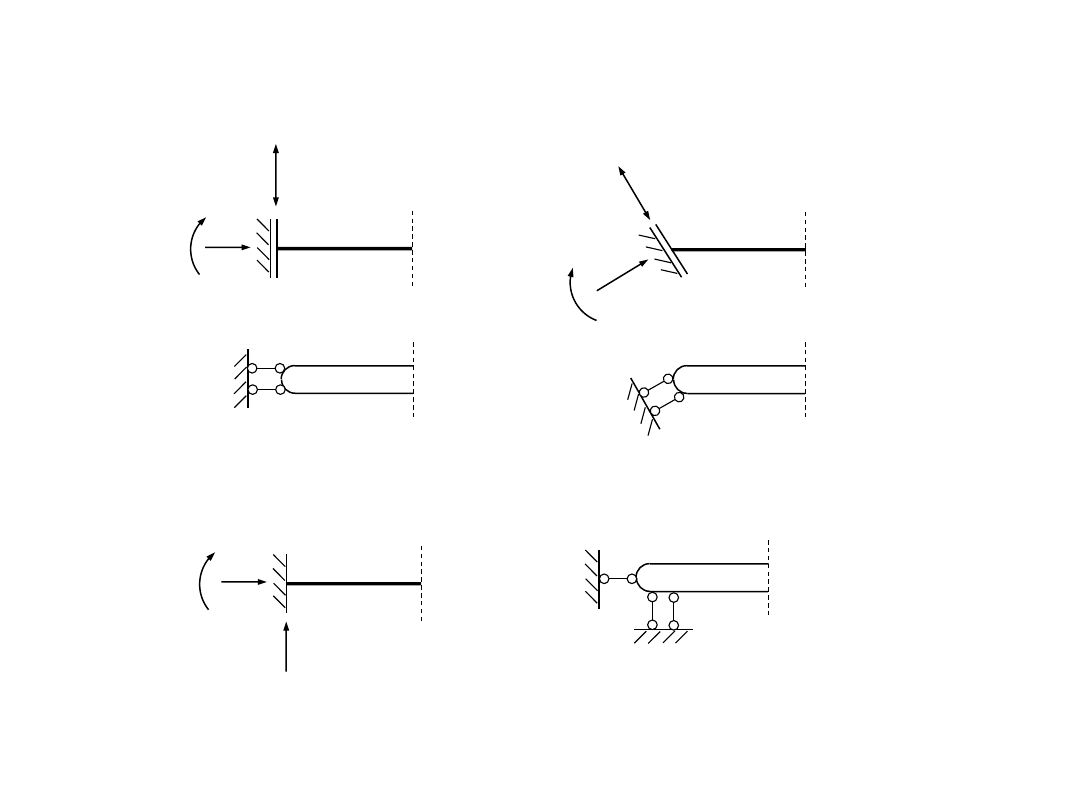
4. podpora ślizgowa
5. utwierdzenie
R
1
R
2
R
1
R
2
R
1
R
3
R
2
Wyszukiwarka
Podobne podstrony:
Analiza kinetyczna i statyczna płaskich układów tarcz sztywnych
Analiza kinematyczna płaskich układów prętowych
Analiza statyczna płaskich ukladow prętowych
Podstawowe wzory i tablice geometria figur płaskich
Optymalizacja niezawodnościowa płaskich układów kratowych za pomocą zbiorów rozmytych
Statyczna Wyznaczalność i Geometryczna Niezmienność to dwa podstawowe warunki
Analiza kinematyczna kratownic płaskich
Analiza kinematyczna ram plaski Nieznany (2)
Analiza Algorytmów Genetycznych jako Ukladow Dynamicznych 08 Kotowski PhD p72
Analiza kinematyczna kratownic płaskich
charakterystyki geometryczne figur plaskich czesc I
Analiza geometrii Gruszczyńska
Geometryczna niezmienność
charakterystyki geometryczne figur plaskich czesc II (1)
Charakterystyki geometryczne figur płaskich
Geometria Figur Plaskich
Geometryczna niezmienność układu
więcej podobnych podstron