Inżynieria Środowiska
2011/12
Materiały
do wykładu 2
13 10 2011
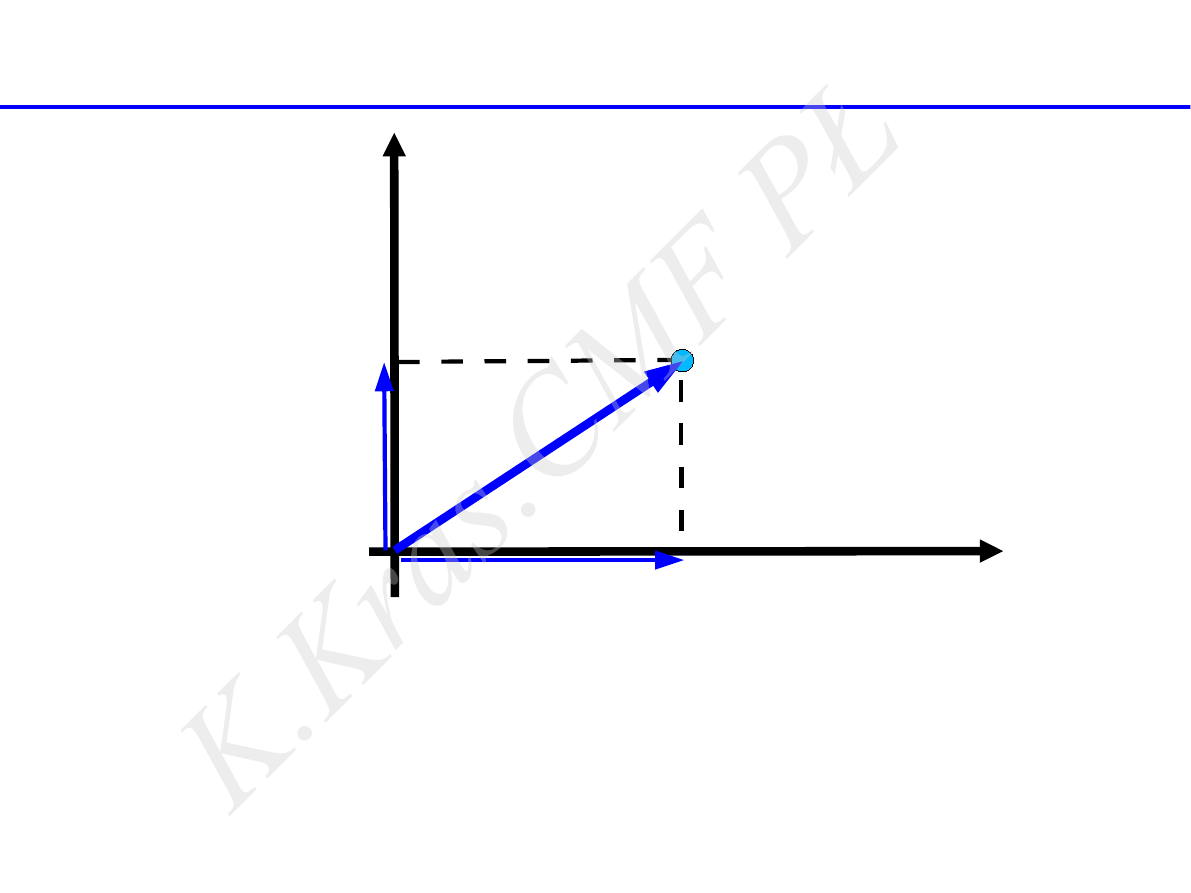
x
1
y
1
Y
X
r
r
x
r
y
r =
r
x
r
y
=
r
x
ir
y
j
wektor położenia
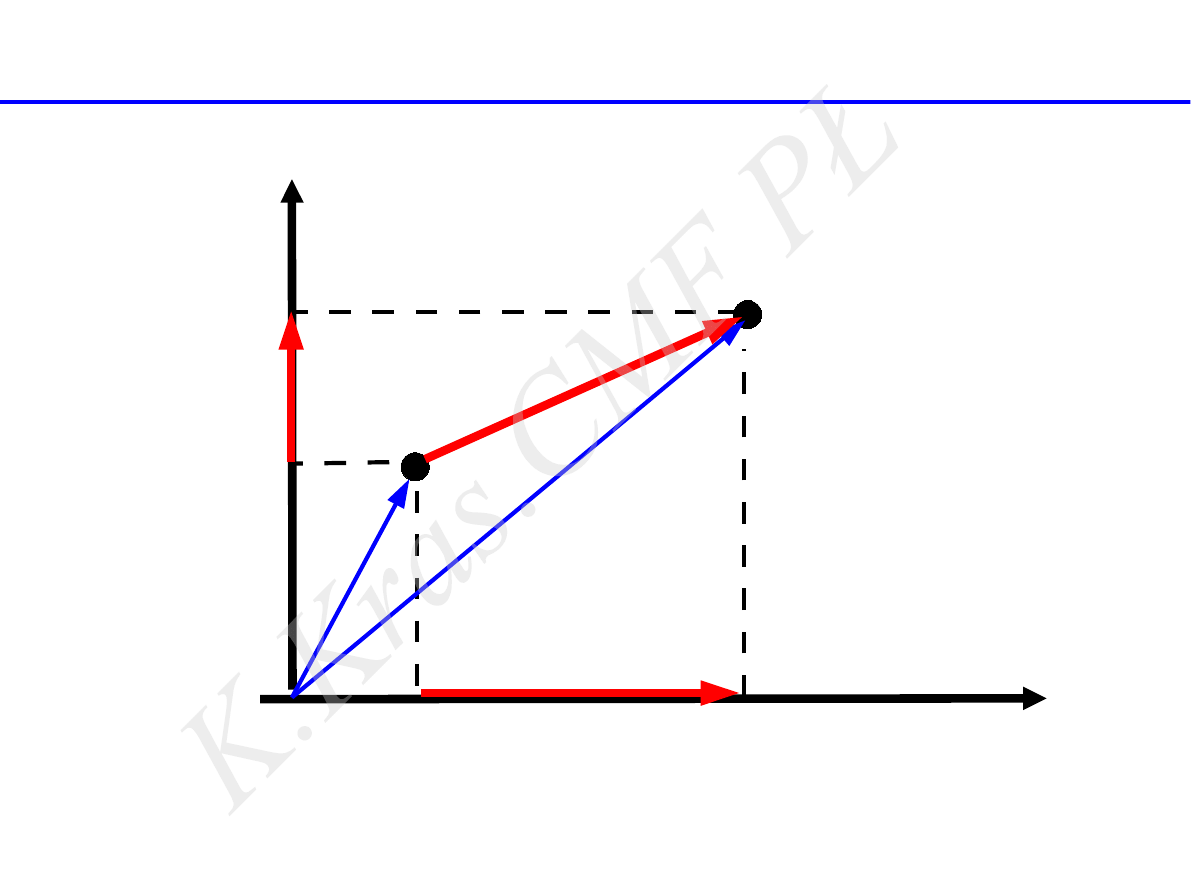
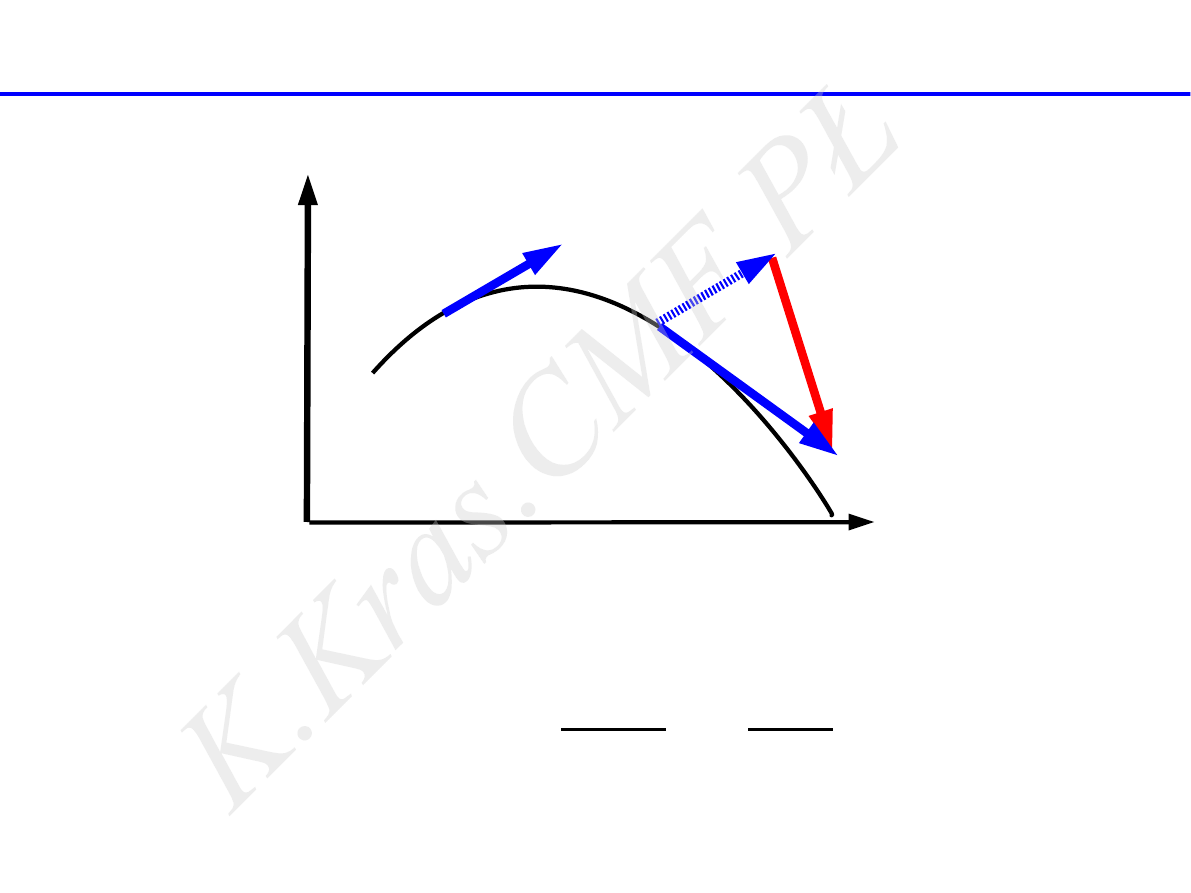
y
x
⃗
r
1
(
t)
⃗
r
2
(
t+Δ t )
r
r
x
r
y
wektor położenia
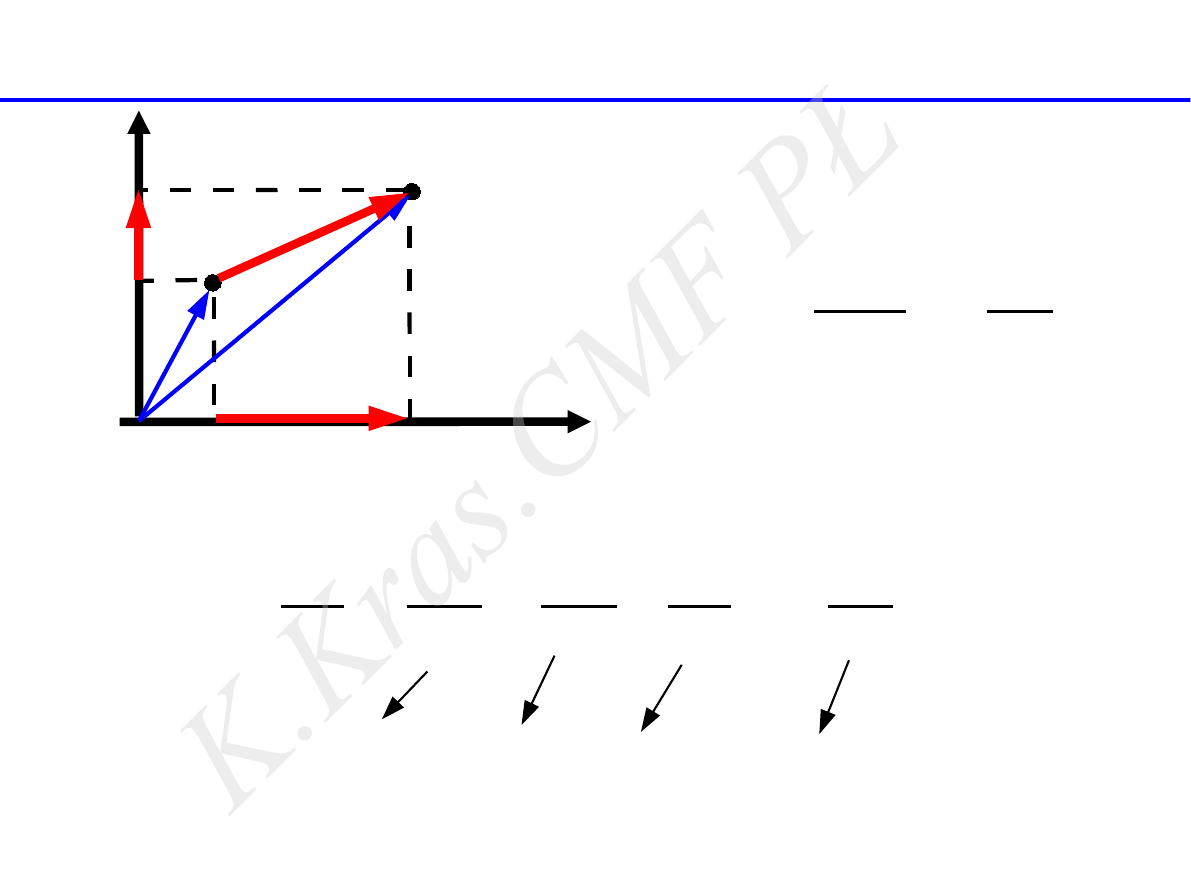
⃗
V = lim
Δ
t →0
Δ ⃗r
Δ
t
=
⃗
dr
dt
⃗
V =
d ⃗r
dt
=
d ⃗
r
x
dt
+
d ⃗
r
y
dt
=
dr
x
dt
⃗i +
dr
y
dt
⃗j
⃗
V = ⃗
V
x
+ ⃗
V
y
=
V
x
⃗i + V
y
⃗j
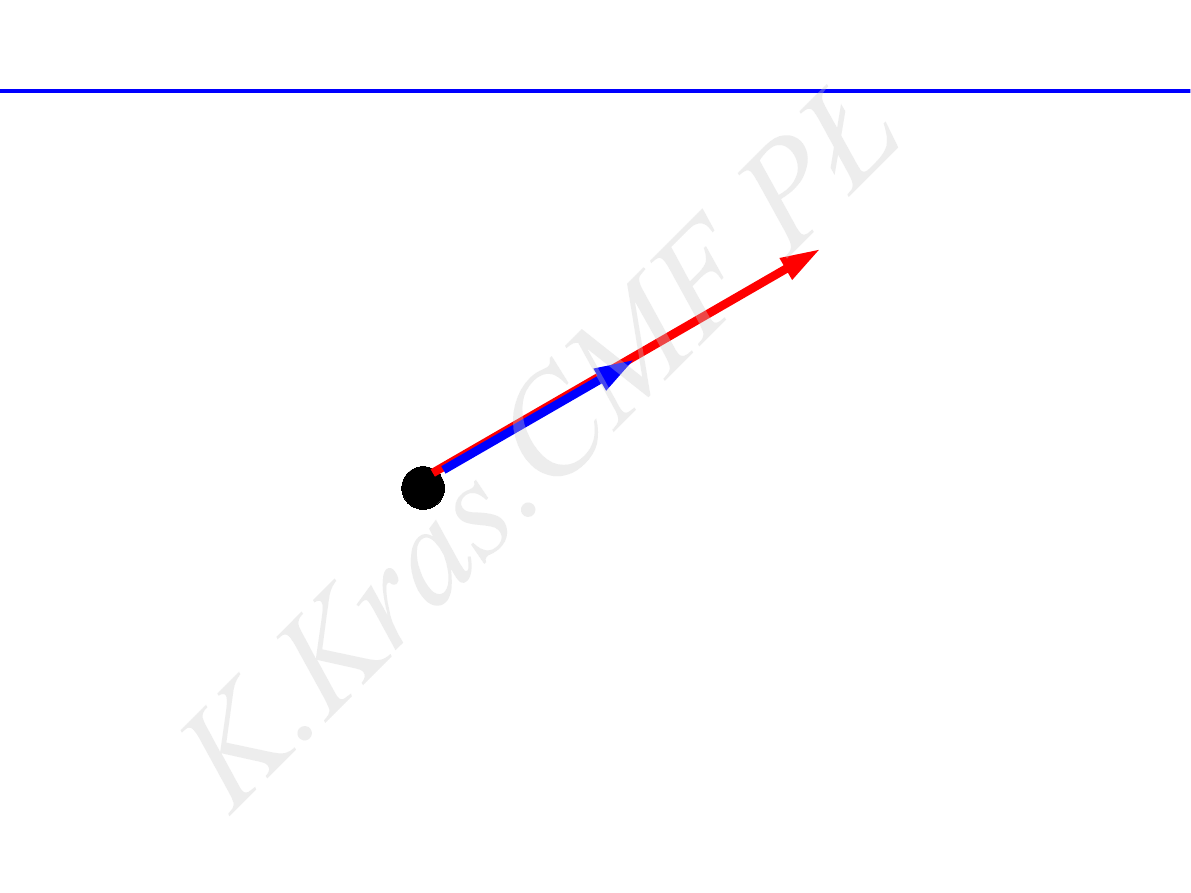
y
x
⃗
r
1
(
t)
⃗
r
2
(
t+Δ t )
r
r
x
r
y
wektor prędkości
⃗a = lim
Δ
t → 0
Δ ⃗
V
Δ
t
=
⃗
dV
dt
⃗
V (t )
⃗
V (t+Δ t)
Δ ⃗
V
y
x
wektor przyspieszenia
wektor pędu
⃗p = m ⃗
V
⃗p
⃗
V
m
V
V
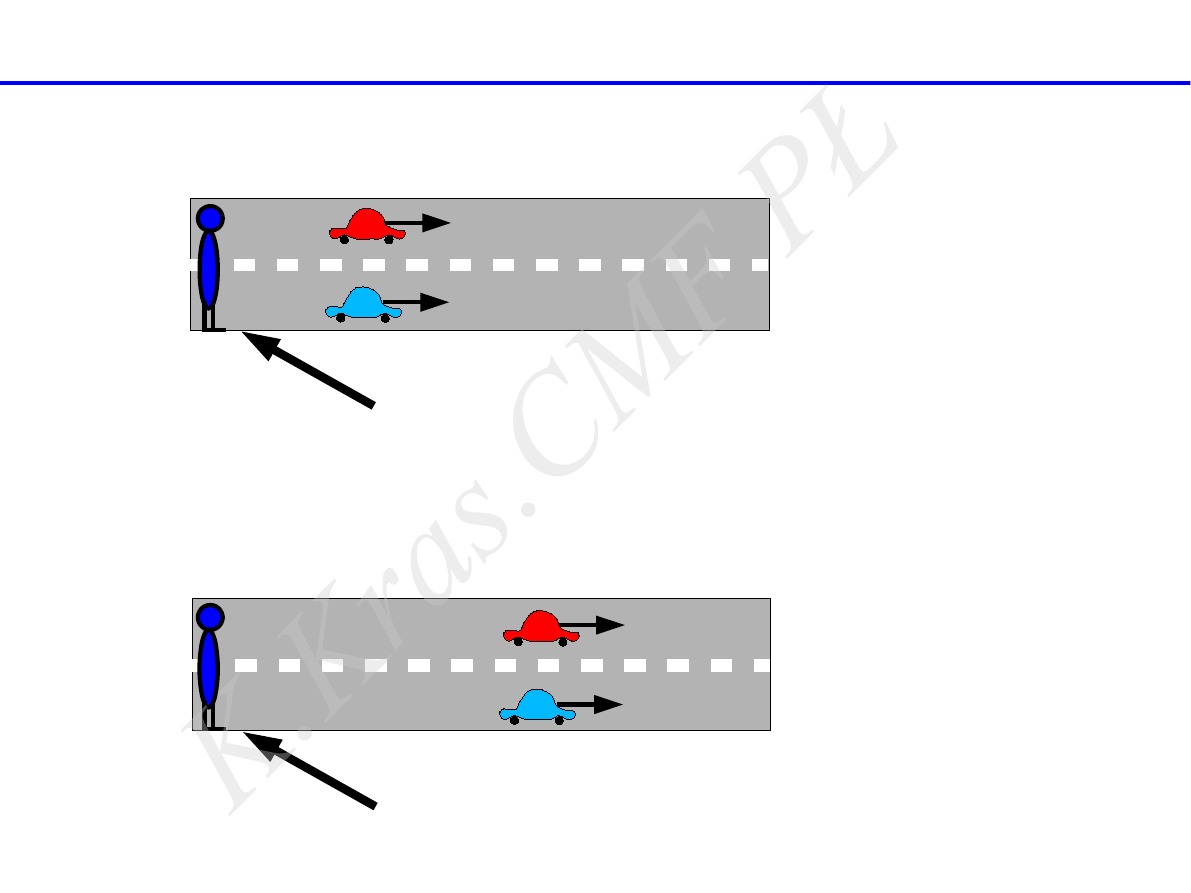
obserwator
A
„związany z ziemią”
t =t
1
V
V
t =t
2
t
1
układ odniesienia
obserwator
A
„związany z ziemią”
V
V
obserwator
B
„związany z
czerwonym samochodem”
t =t
1
t =t
2
t
1
V
V
obserwator
B
„związany z
czerwonym samochodem”
układ odniesienia
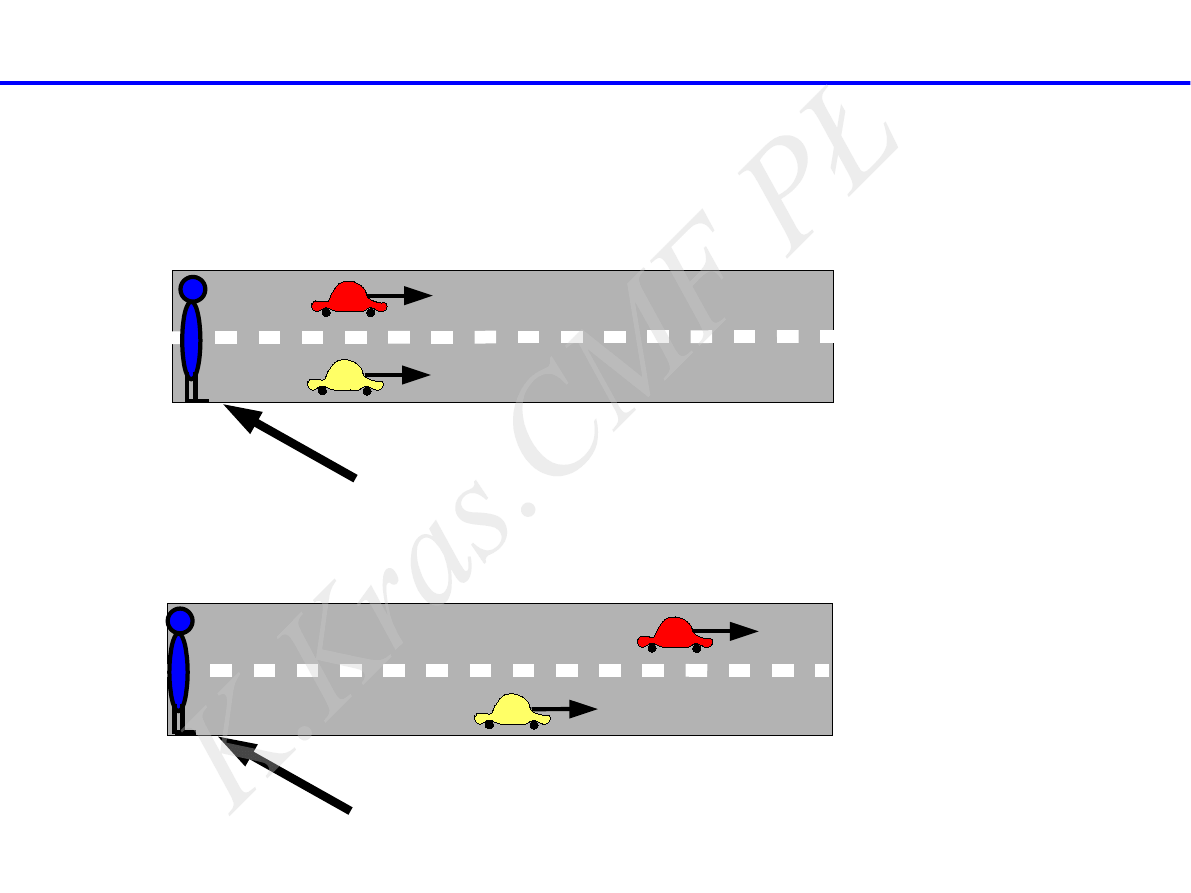
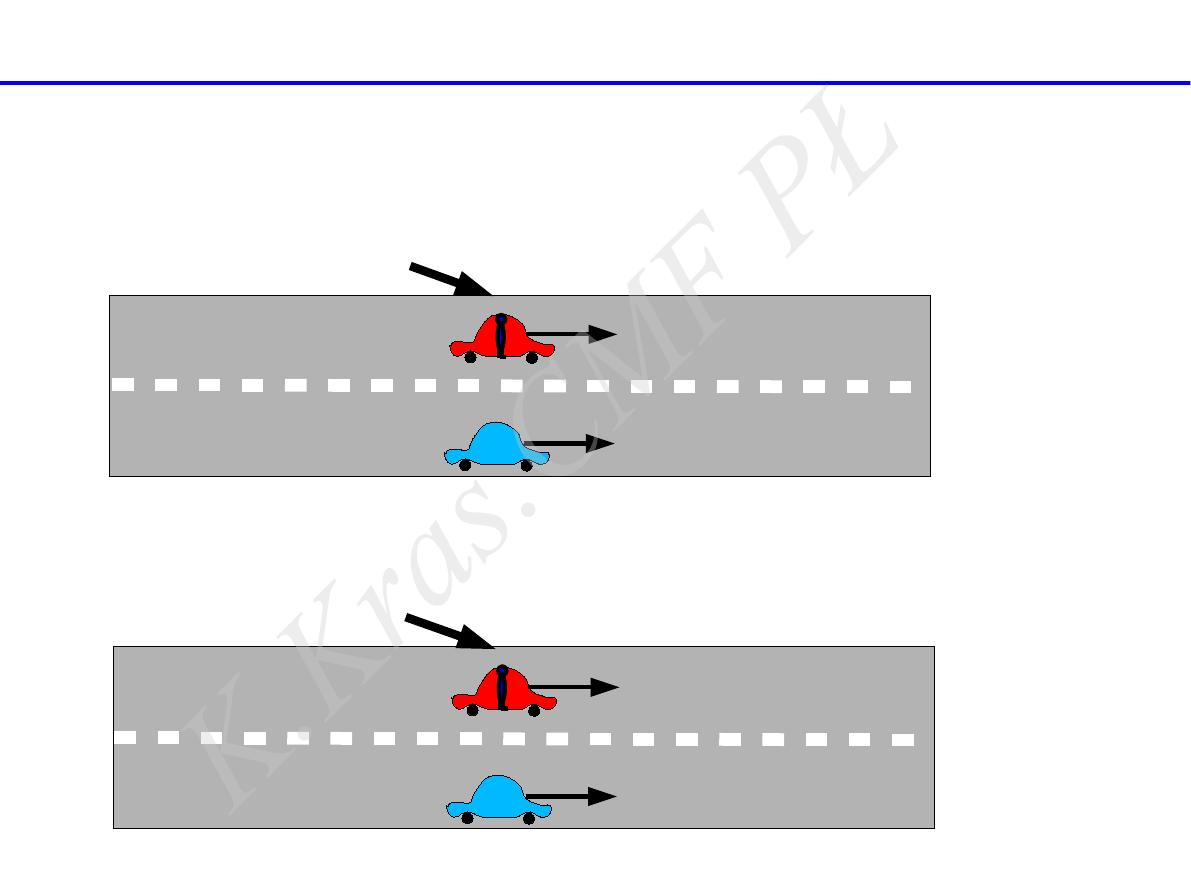
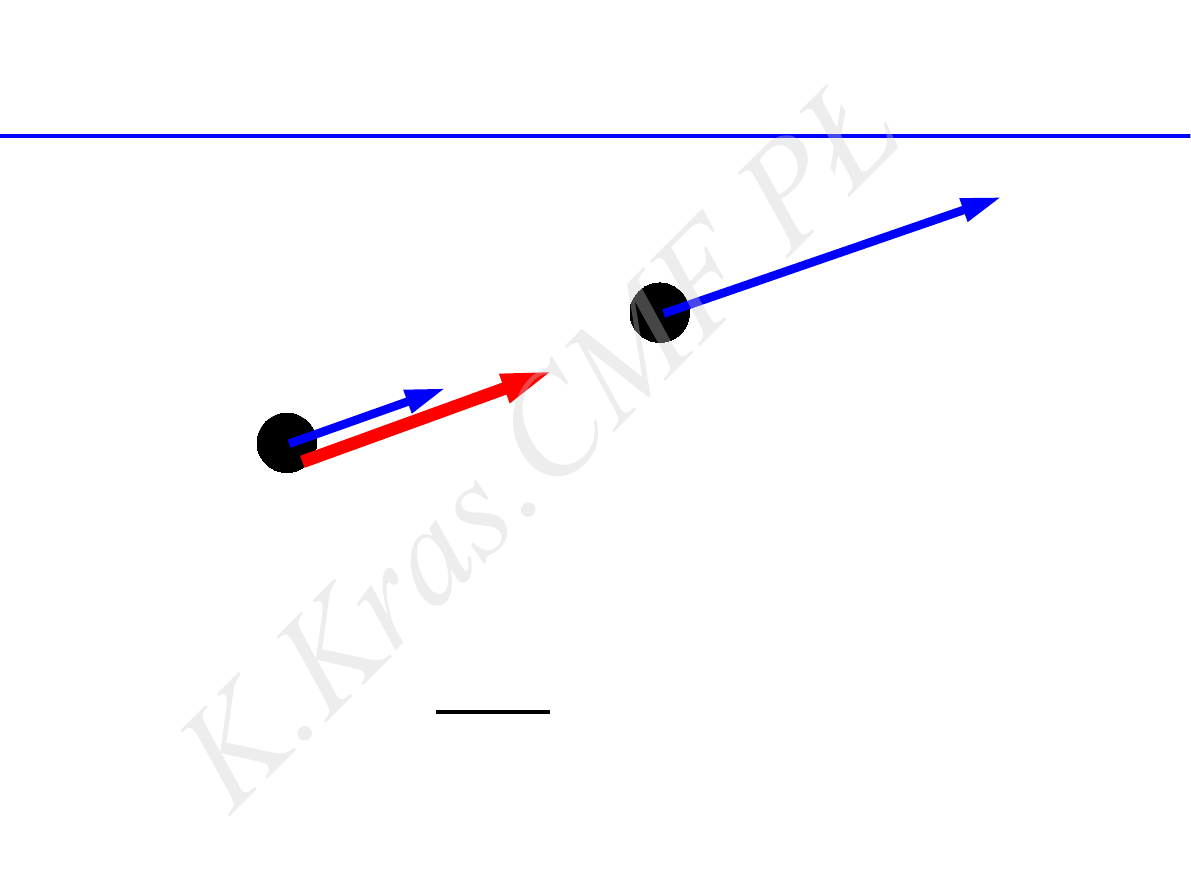
V
2
V
1
obserwator
A
„związany z ziemią”
t =t
1
t =t
2
t
1
obserwator
A
„związany z ziemią”
V
1
V
2
układ odniesienia
V
1
>
V
2
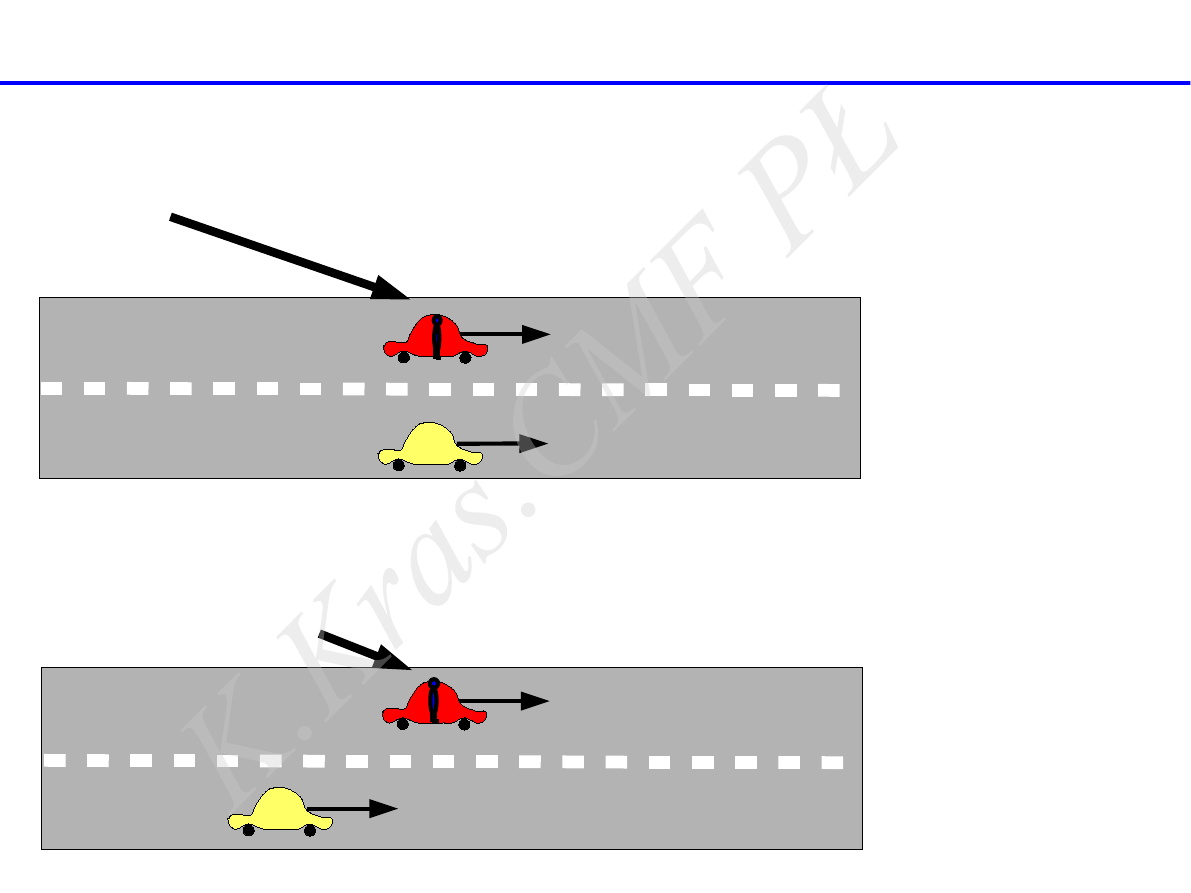
obserwator
B
„związany z
czerwonym samochodem”
obserwator
B
„związany z
czerwonym samochodem”
t =t
1
t =t
2
t
1
V
1
V
1
V
2
V
2
układ odniesienia
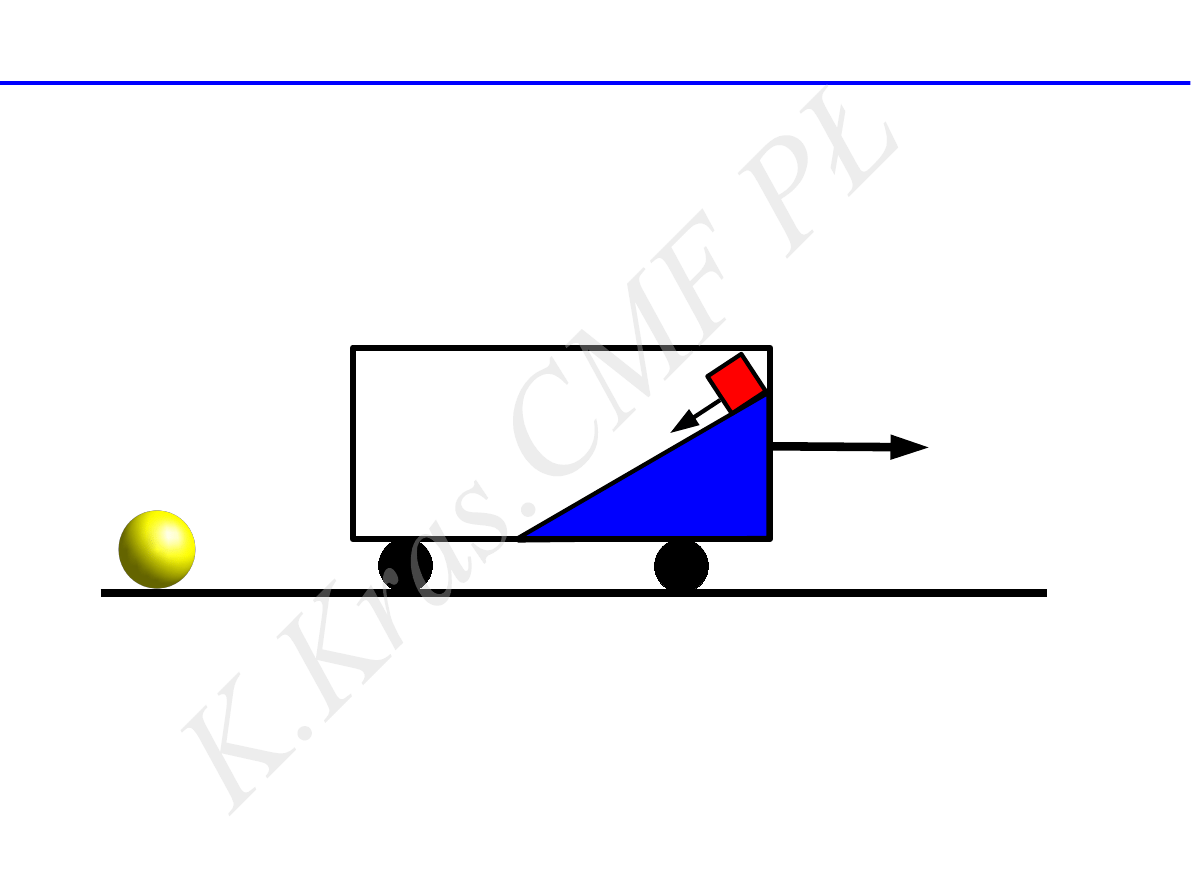
⃗
V
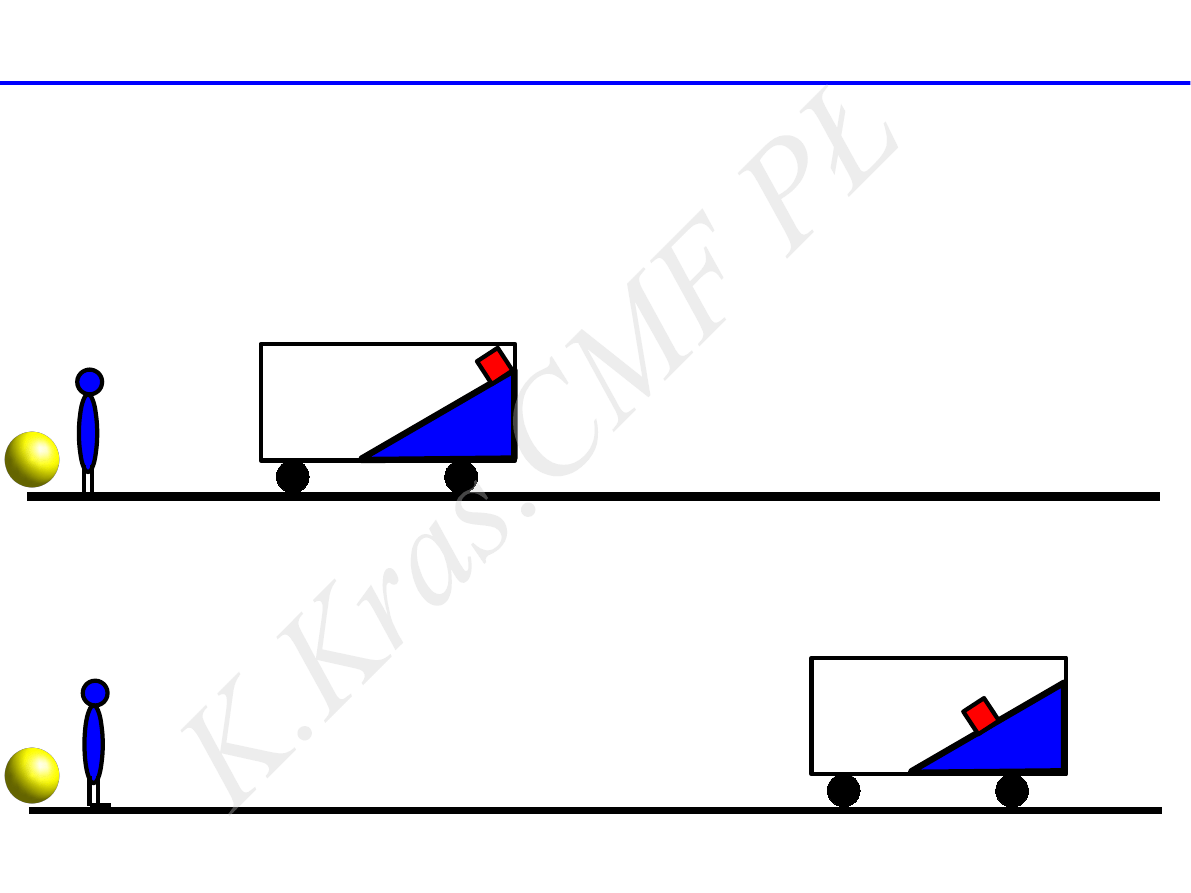
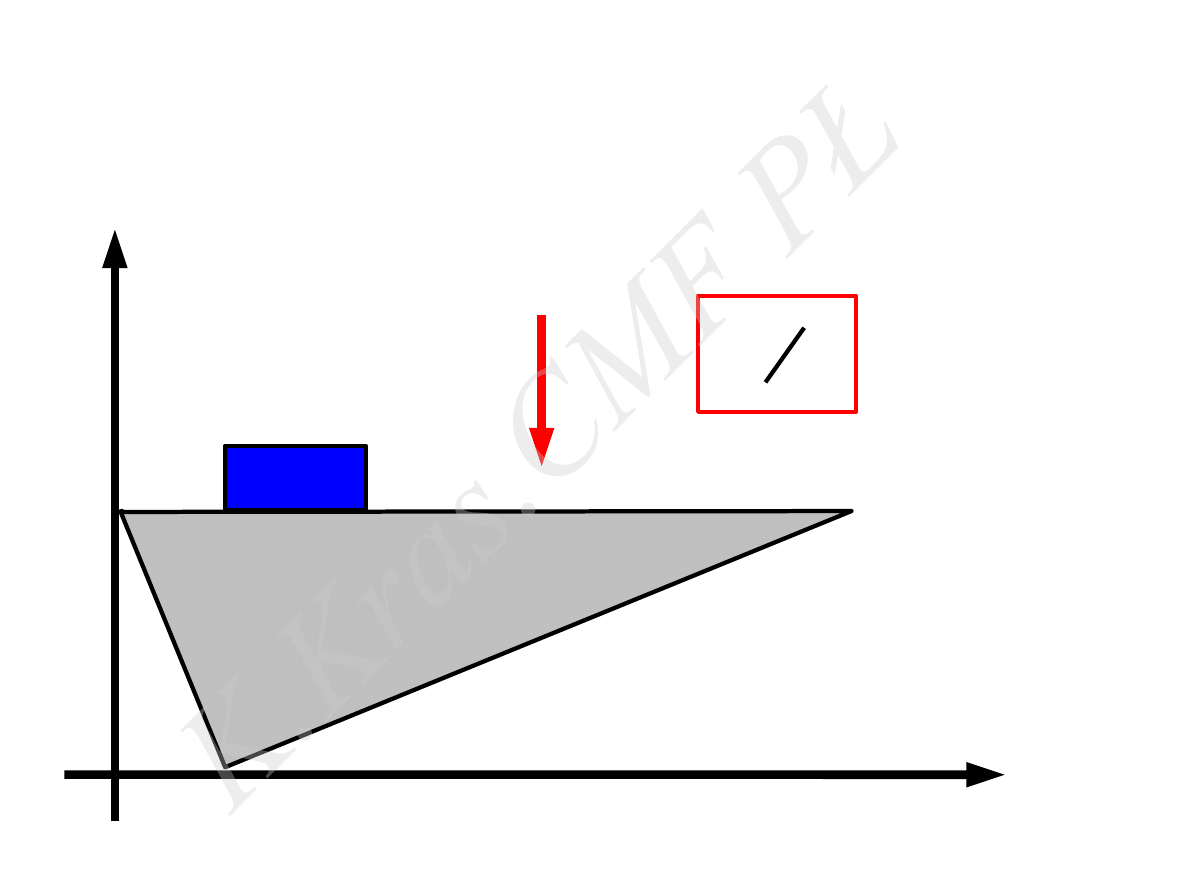
wózek z przymocowanym do podłogi klinem jedzie po poziomej powierzchni,
po klinie zsuwa się klocek
układ odniesienia
A
B
C
⃗
V
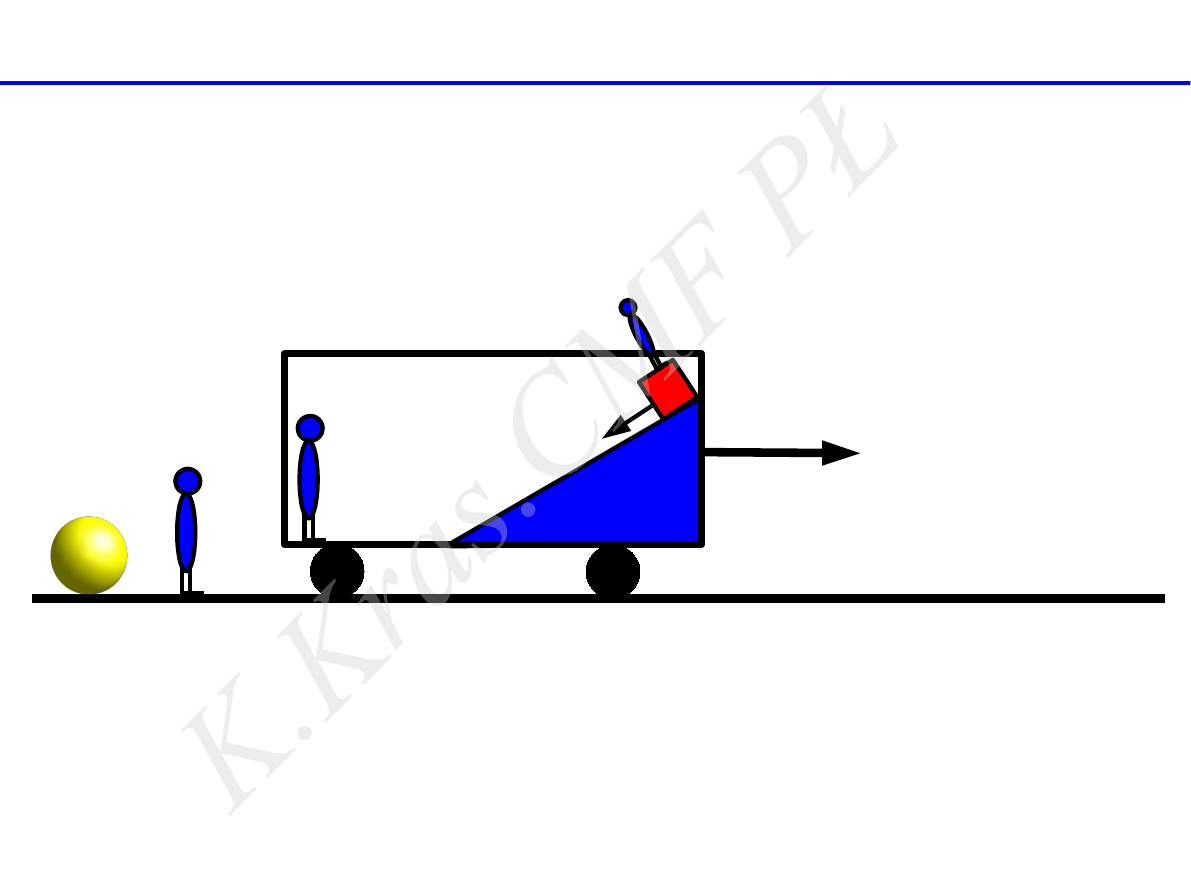
układ odniesienia
obserwator A
„związany z ziemią”
A
A
układ odniesienia
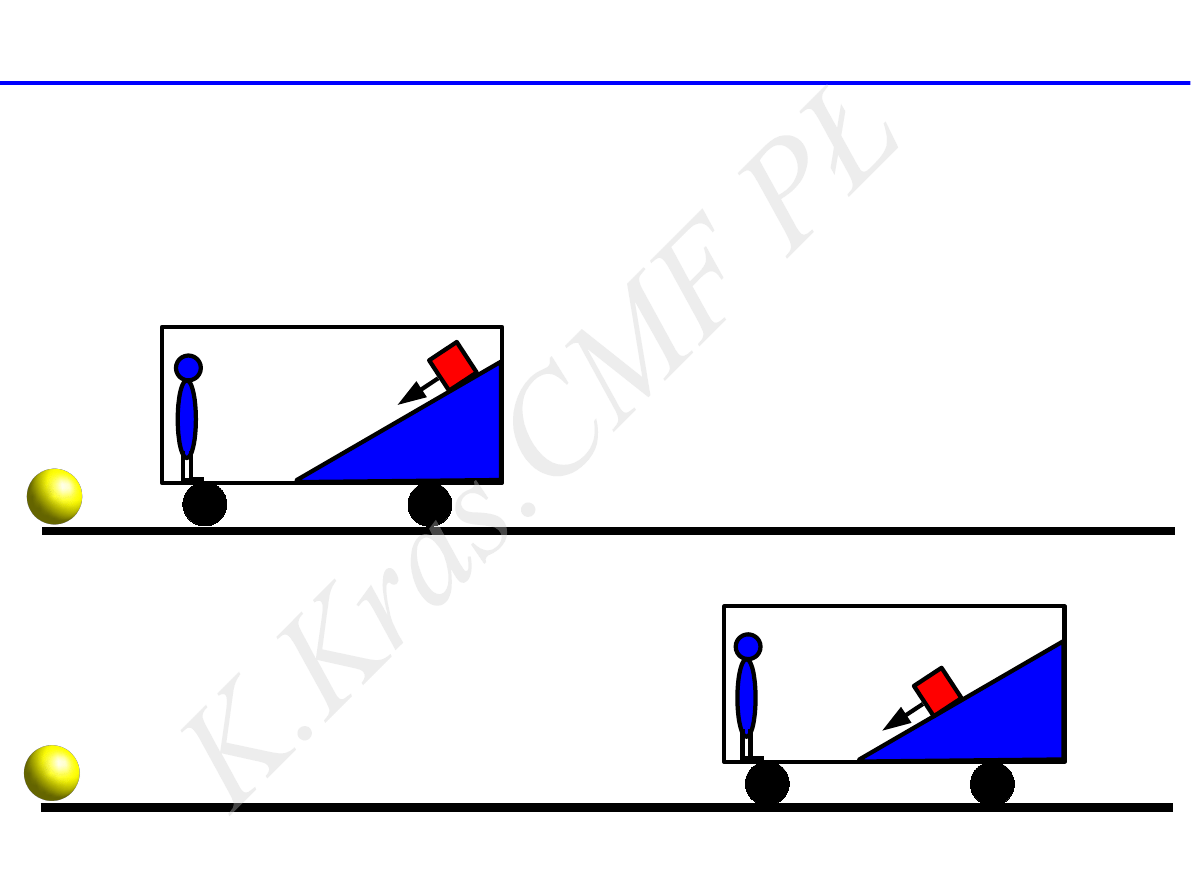
B
B
obserwator B
„związany z wózkiem”
układ odniesienia
obserwator C
„związany z „klockiem”
C
C
układ odniesienia
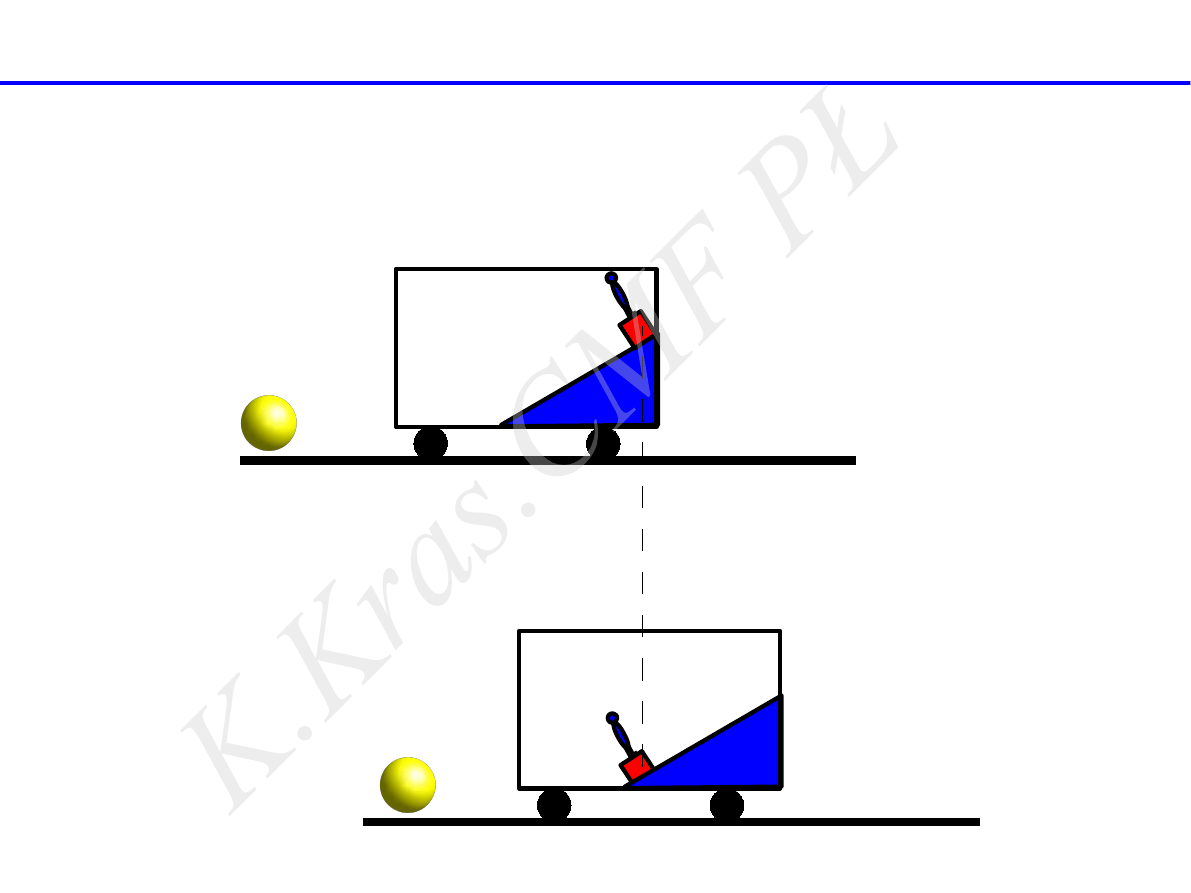
X
y
x
g
h
g∥h
x≠const
y≠const
X
y
x
g
h
g∥h
x≠const
y=const
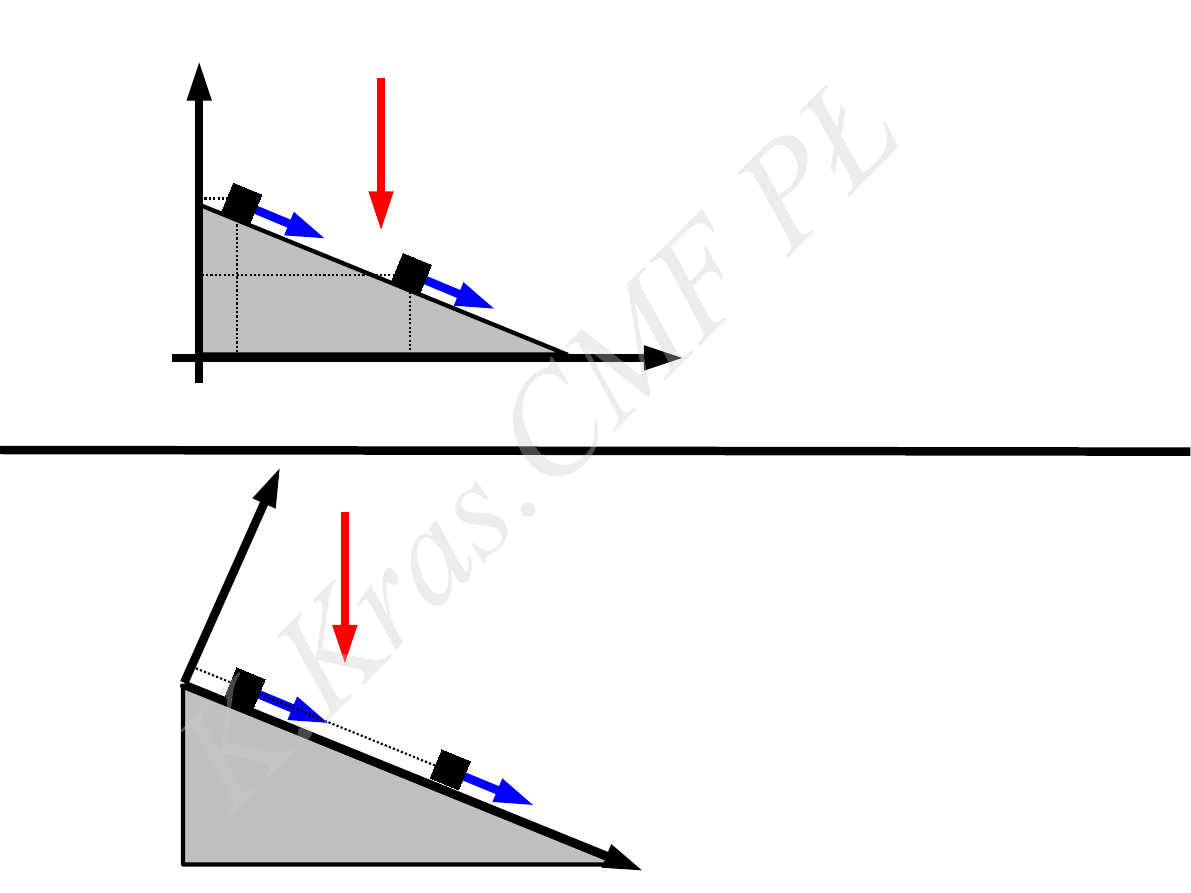
x
1
x
1
x
2
x
2
y
2
y
1
=
y
2
y
1
y= f ( x)
y
x
g
h
⃗g∥h
Źle !!!
I zasada dynamiki
Ciało trwa w spoczynku
lub w ruchu jednostajnym prostoliniowym,
dopóki nie zadziała na niego siła, która
zmusi go do zmiany tego stanu
inercjalne układy odniesienia
inercjalny układ odniesienia
Układ odniesienia, względem którego
ciało
swobodne
spoczywa lub porusza się ruchem
jednostajnym prostoliniowym.
II zasada dynamiki
d p
d t
=
F
d p
d t
=
d m
V
d t
=
m
d
V
d t
=
m a = F
dla m = const
F ≠0 ⇒
d p
dt
≠
0 ⇒ p≠const
⃗p
⃗p
F
II zasada dynamiki
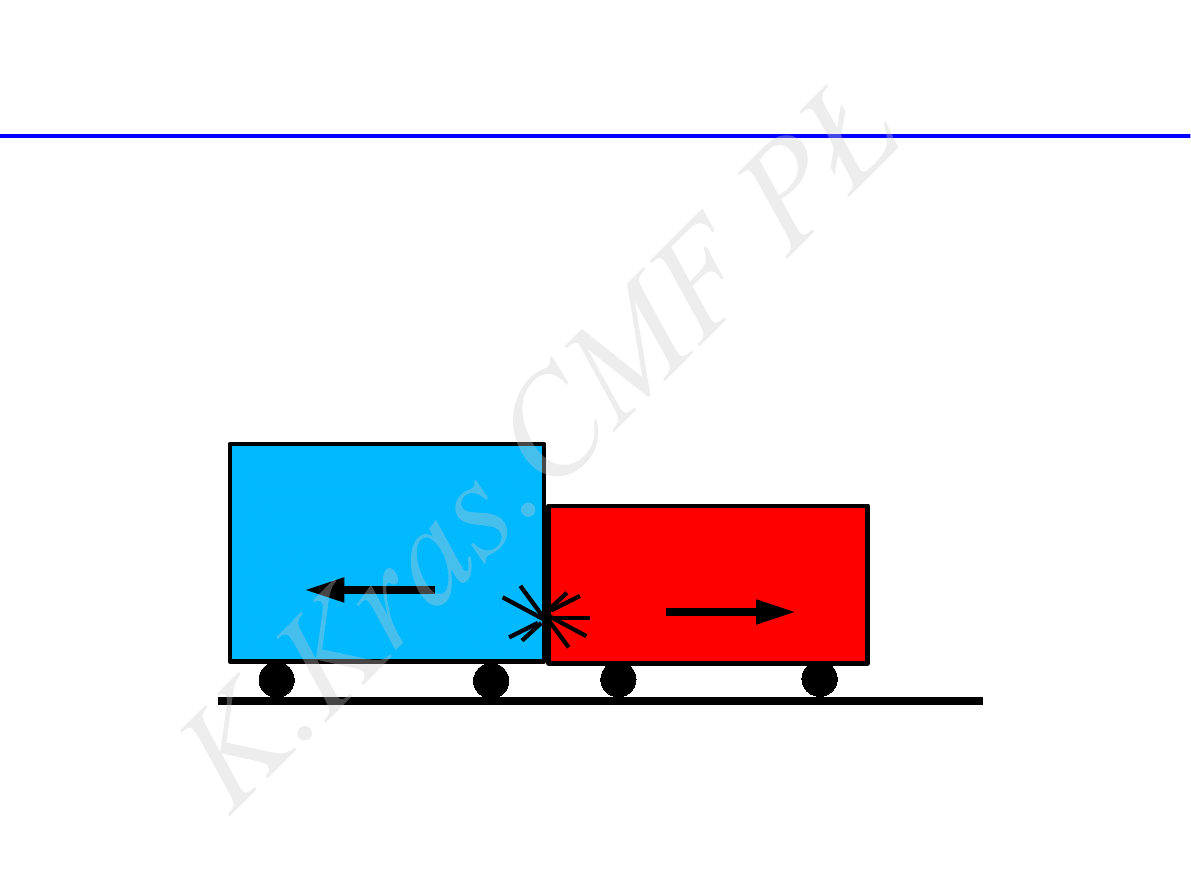
III zasada dynamiki
⃗
F
A , B
= − ⃗
F
B , A
⃗
F
B , A
⃗
F
A , B
A
B
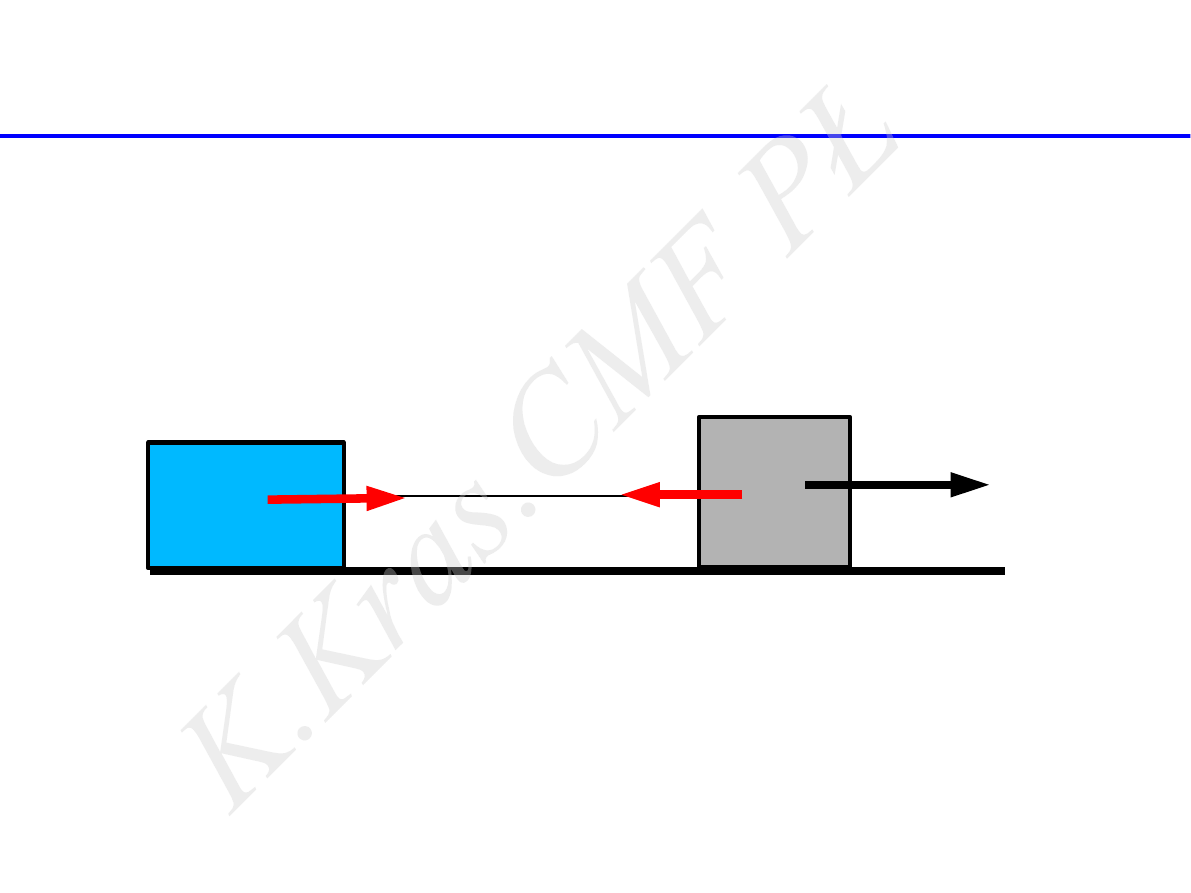
m
1
m
2
F
N
1
N
2
N
1
=
N
2
III zasada dynamiki
masa nici=0
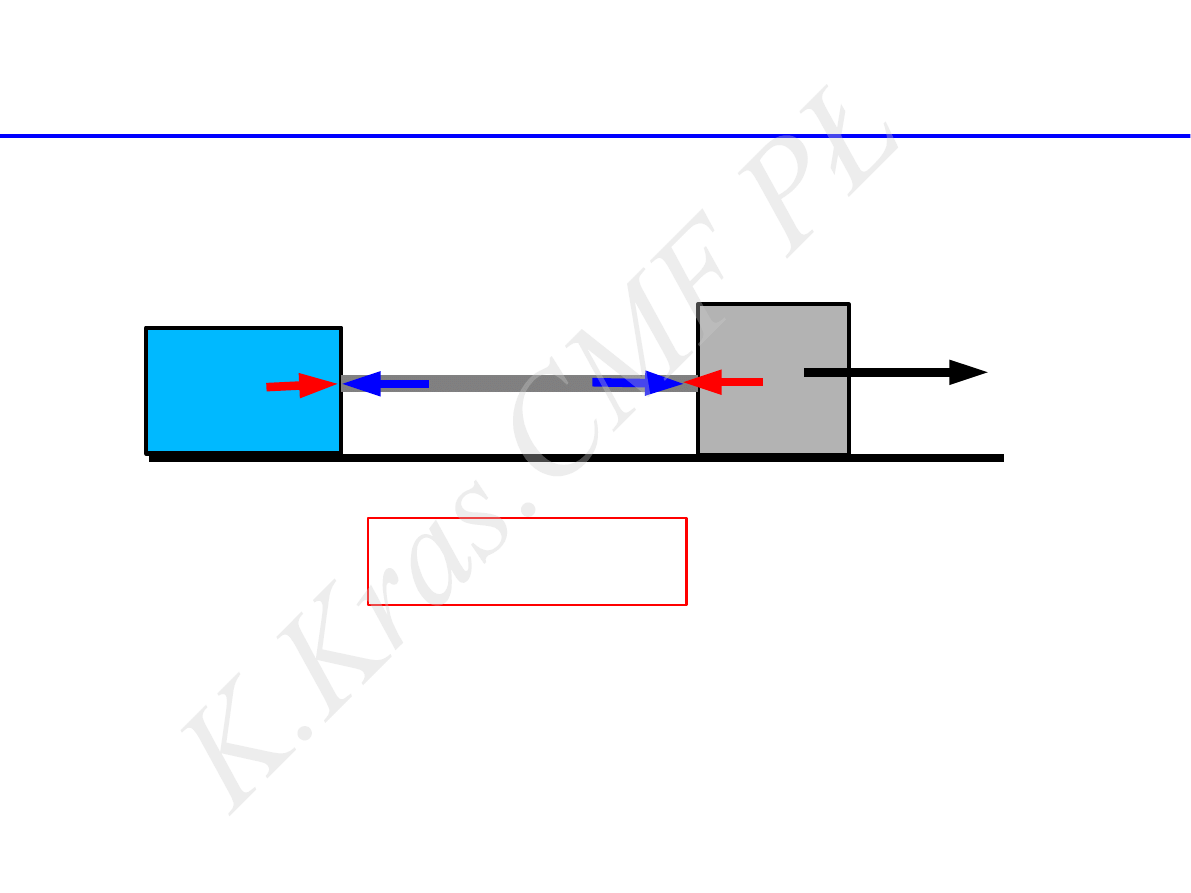
m
1
m
2
F
N
1
N
2
N
1
≠
N
2
N
1
N
2
masa nici≠0
III zasada dynamiki
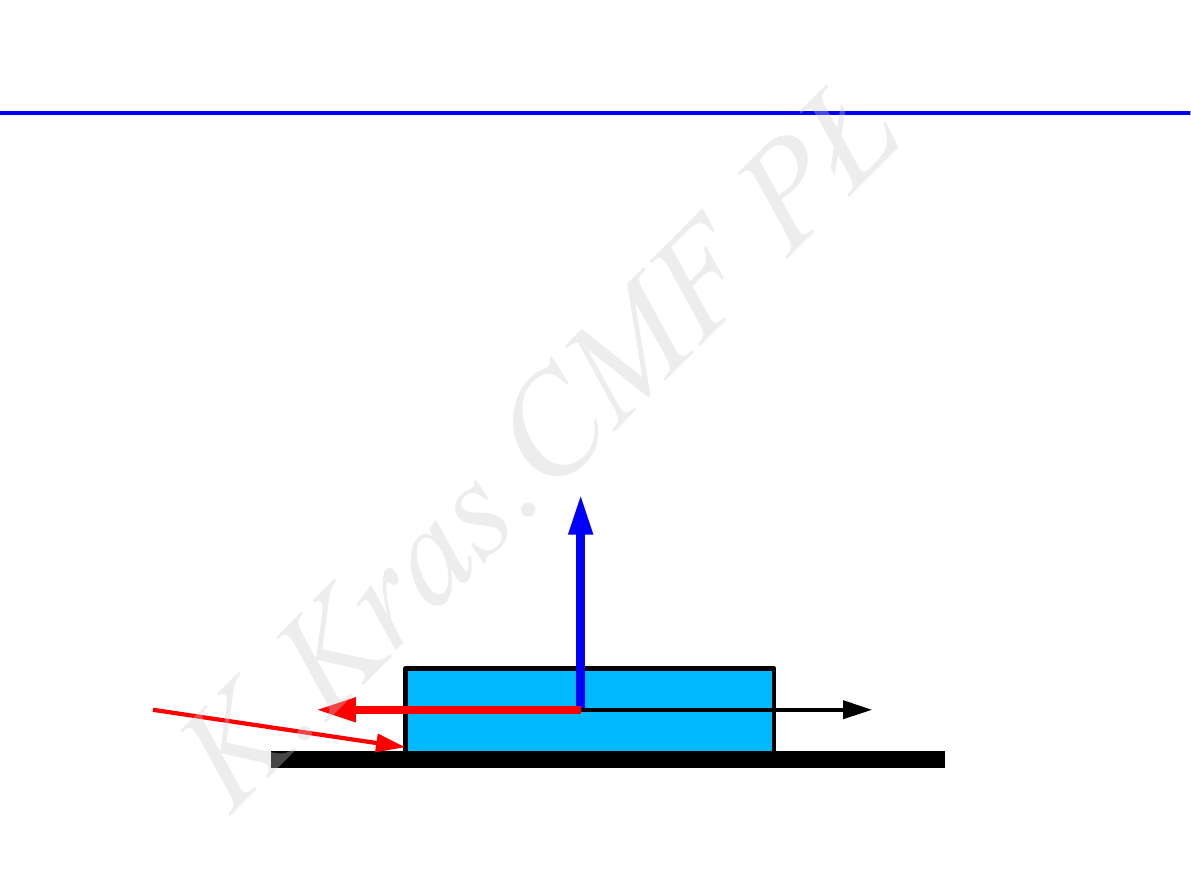
wartość siły tarcia zależy od:
●
rodzaju stykających się powierzchni (współczynnik tarcia f )
●
siły reakcji normalnej R stykających się powierzchni
T ≤ f R
T
R
V
siła tarcia
f

A
B
T
A
B
T
x
y
x
y
T = f x , y ,
V
siła tarcia
V
V
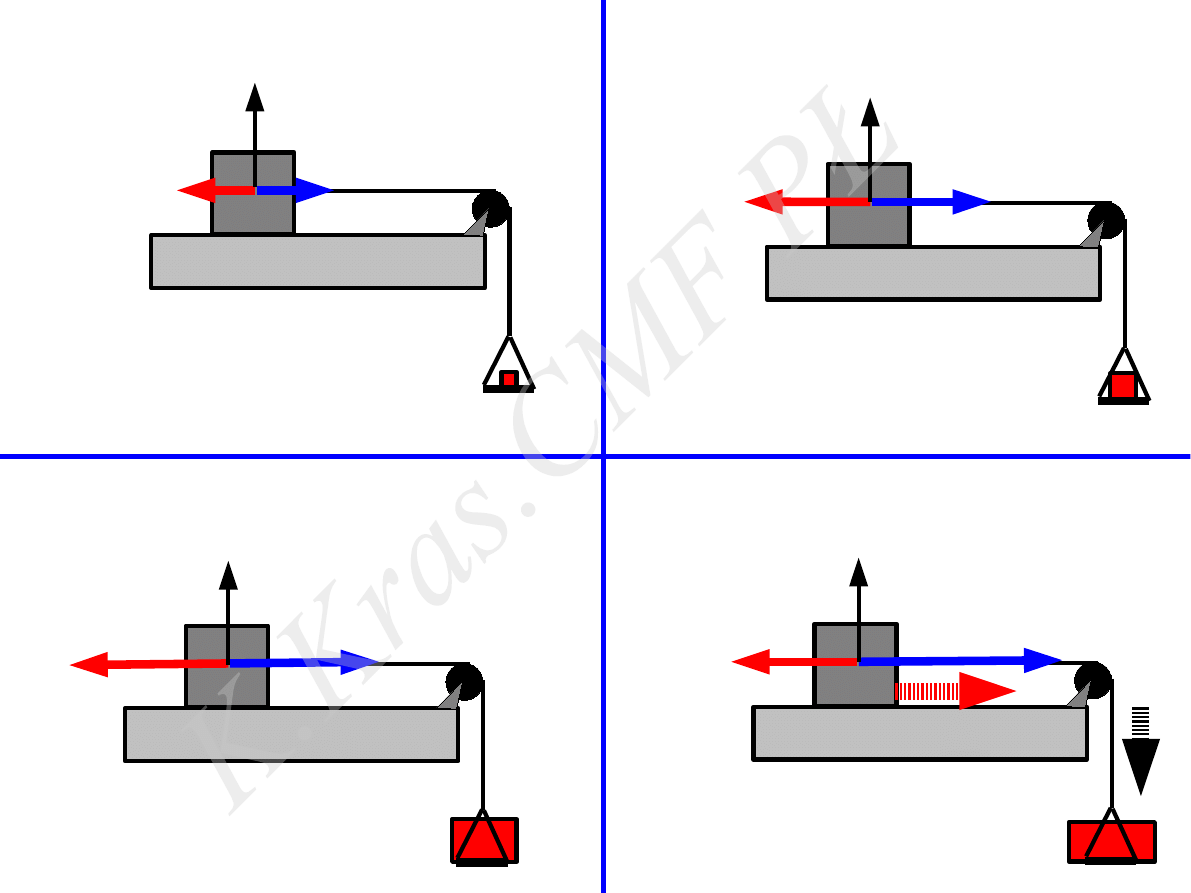
T
N
1
T
N
2
1
2
3
4
T
N
3
T
N
4
T =N
1
T =N
2
R
R
R
R
T =T
max
=
N
3
T =T
max
N
4
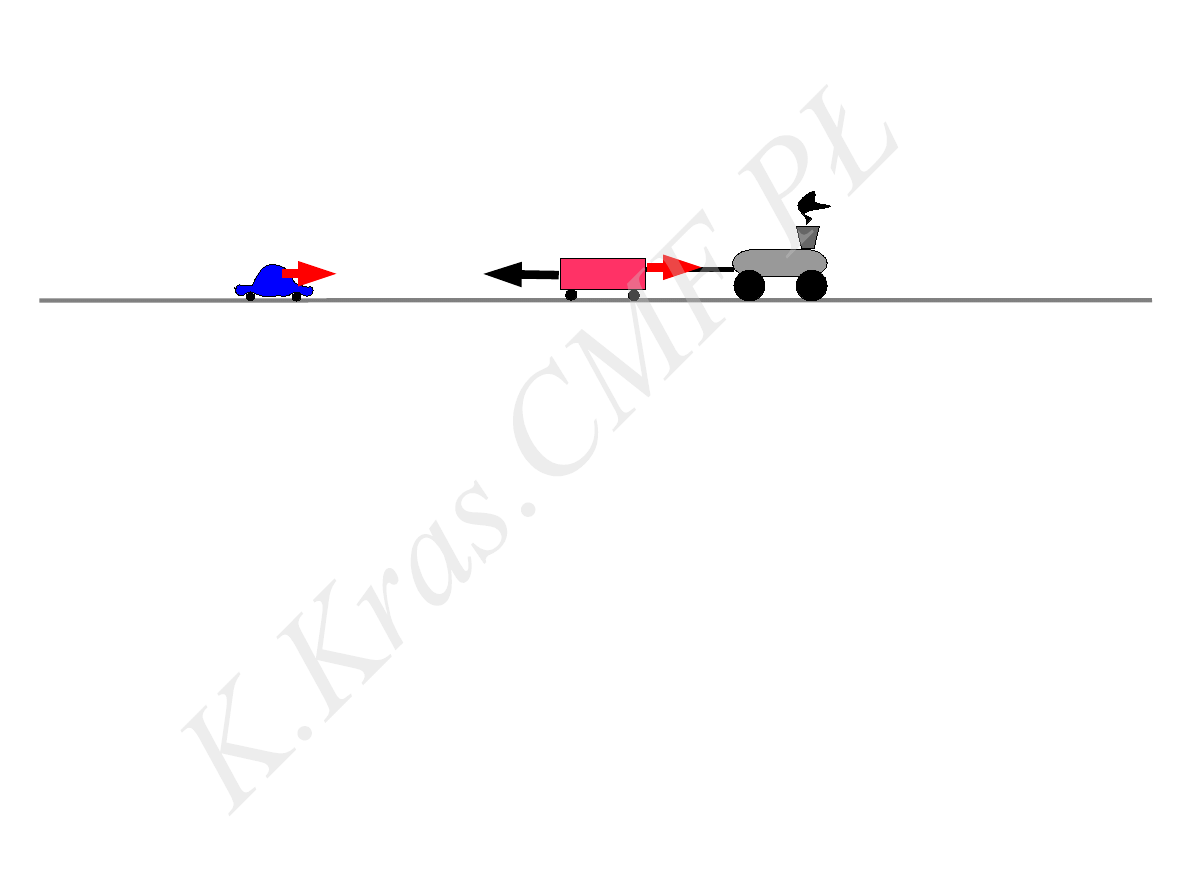
ruch
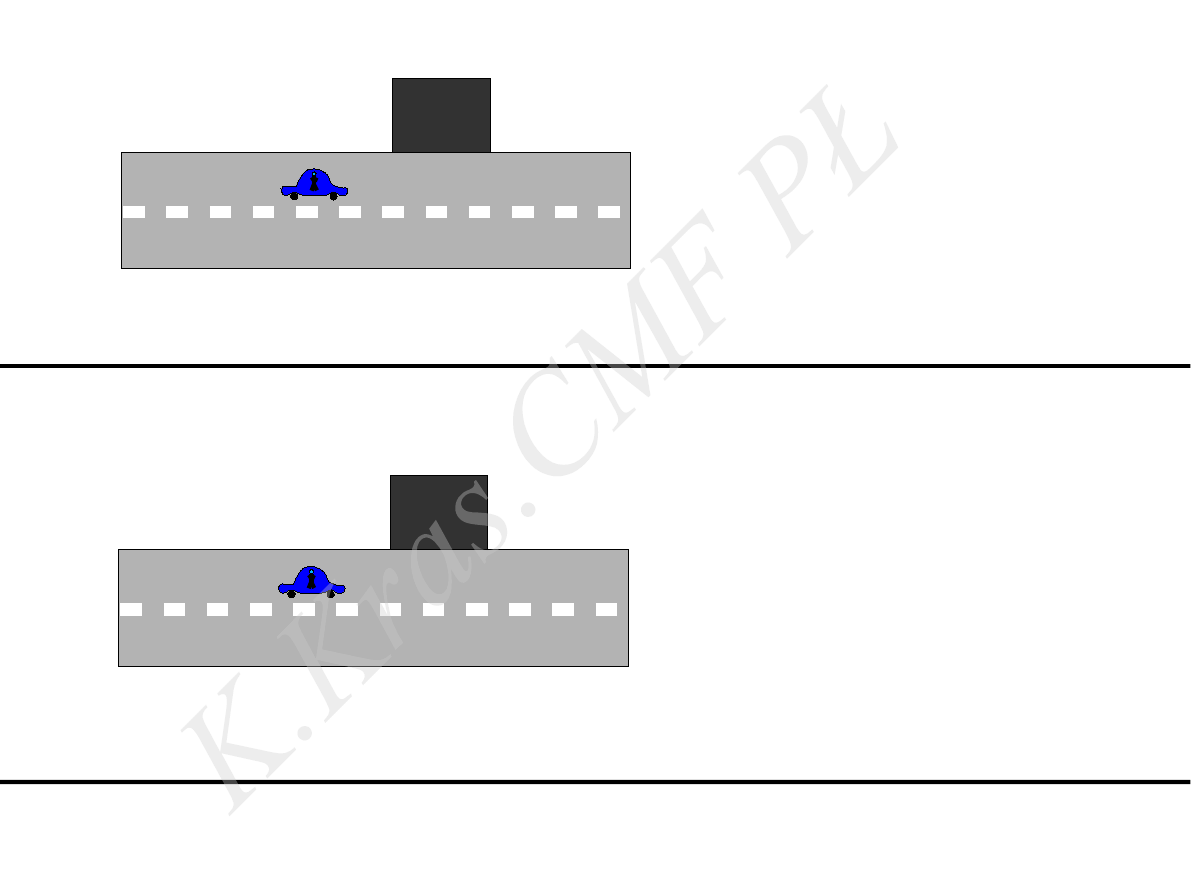
obiekt obserwowany –
dom
układ odniesienia -
samochód
siły( poziome), działające na dom –
brak
t =t
1
t =t
2
>
t
1
układ inercjalny
⃗
V
S
=
0
⃗
V
S
=
0
wynik obserwacji:
obiekt spoczywa
I zasada dynamiki
- spełniona
stała prędkość
stała prędkość
układ inercjalny
t =t
1
t =t
2
>
t
1
⃗
V
S
≠
0
⃗
V
S
≠
0
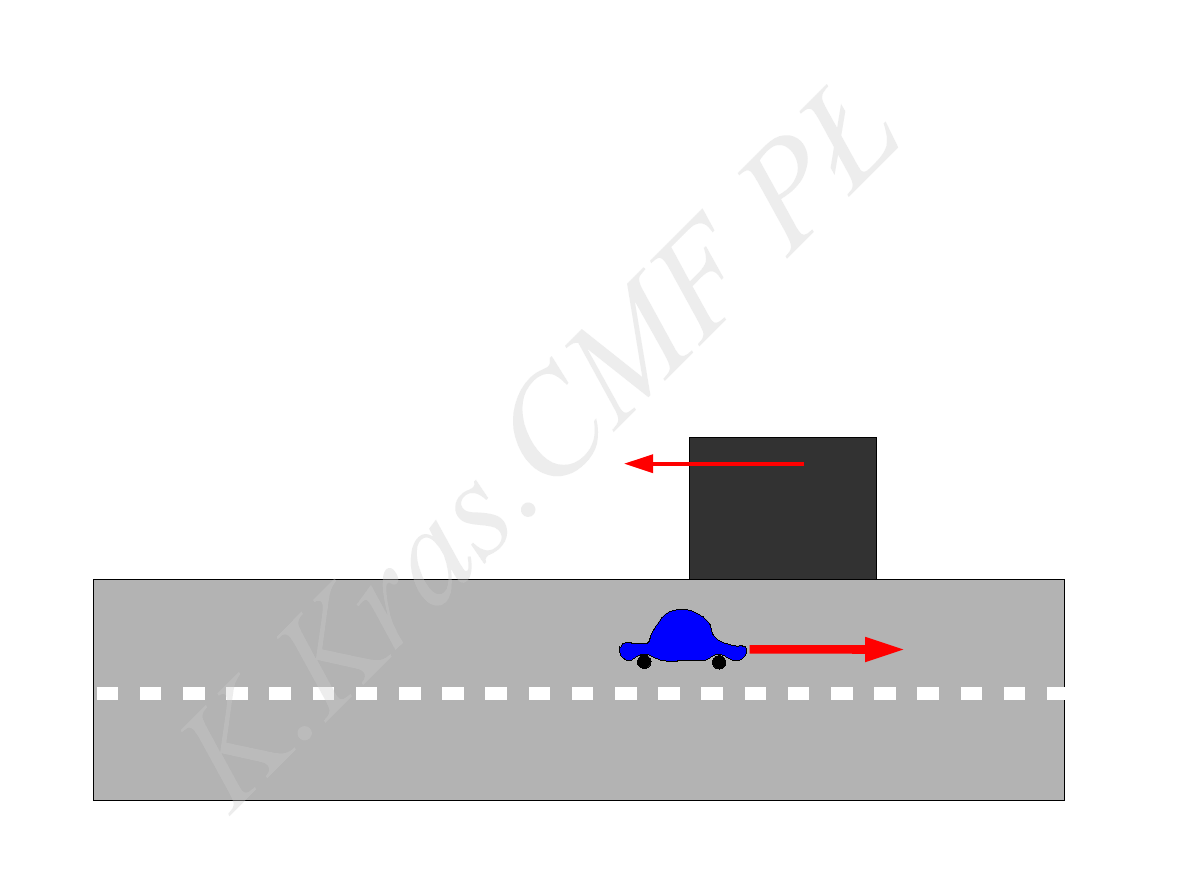
obiekt obserwowany –
dom
układ odniesienia -
samochód
siły( poziome), działające na dom –
brak
wynik obserwacji:
obiekt porusza się ruchem
jednostajnym prostoliniowym
I zasada dynamiki
- spełniona
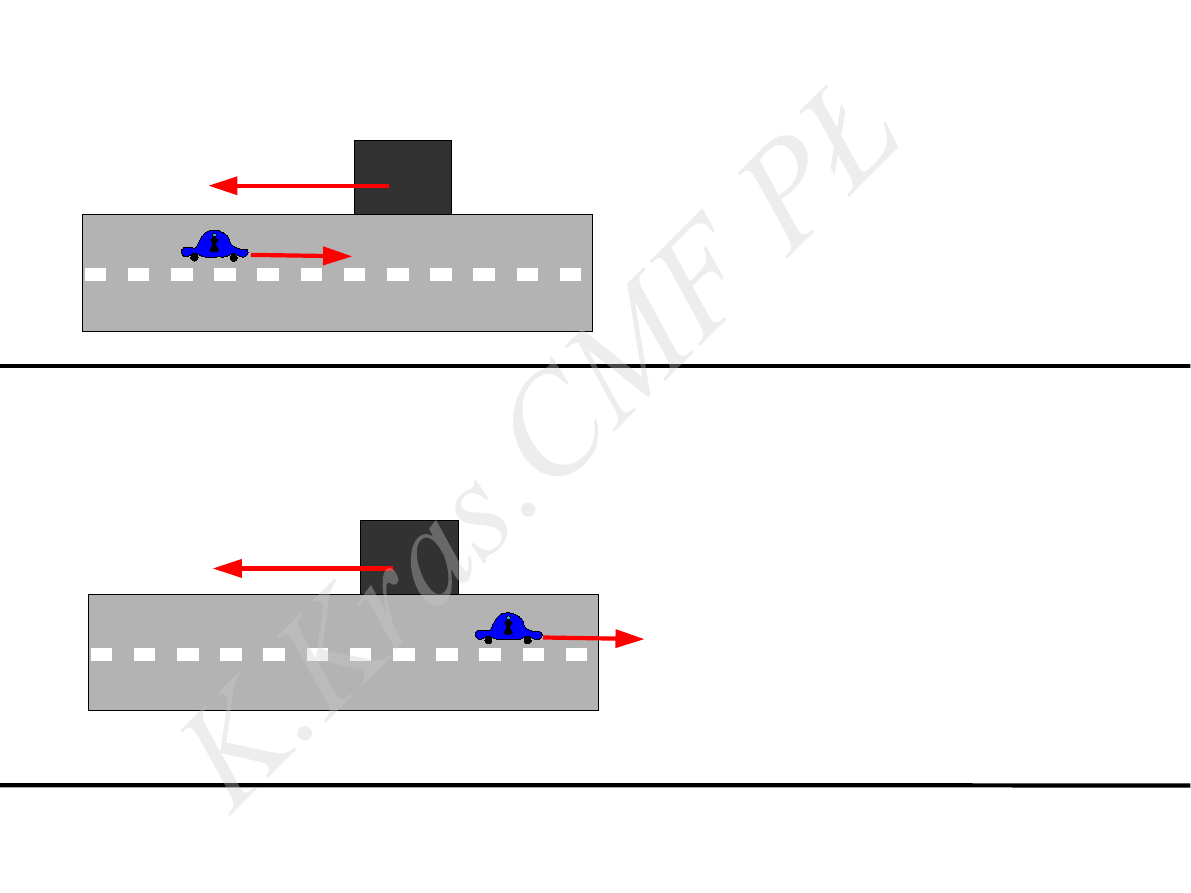
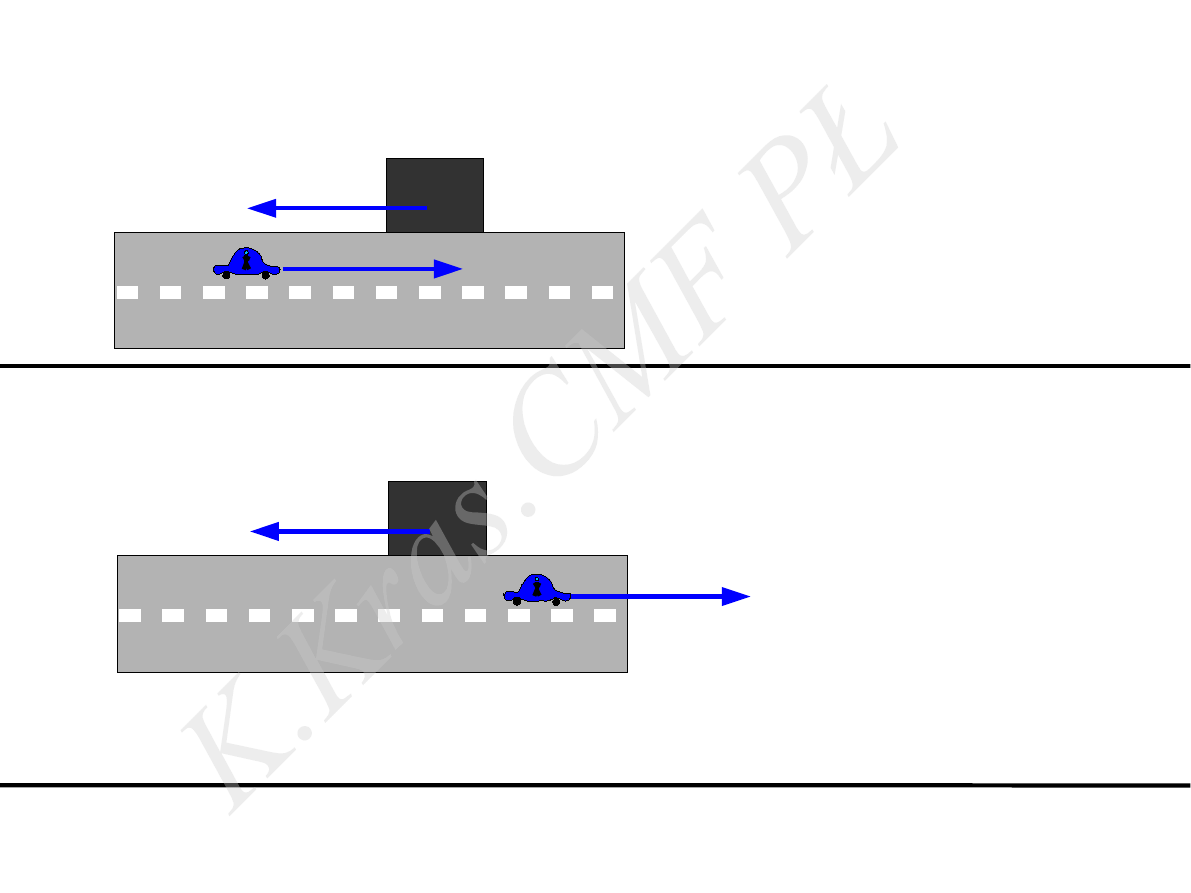
układ nieinercjalny
przyspieszenie
przyspieszenie
t =t
1
t =t
2
>
t
1
obiekt obserwowany –
dom
układ odniesienia -
samochód
siły( poziome), działające na dom –
brak
wynik obserwacji:
obiekt porusza się
z przyspieszeniem
⃗b ≠0
⃗b ≠0
I zasada dynamiki –
NIE spełniona
m
⃗
F
b
= −
m⃗b
⃗b
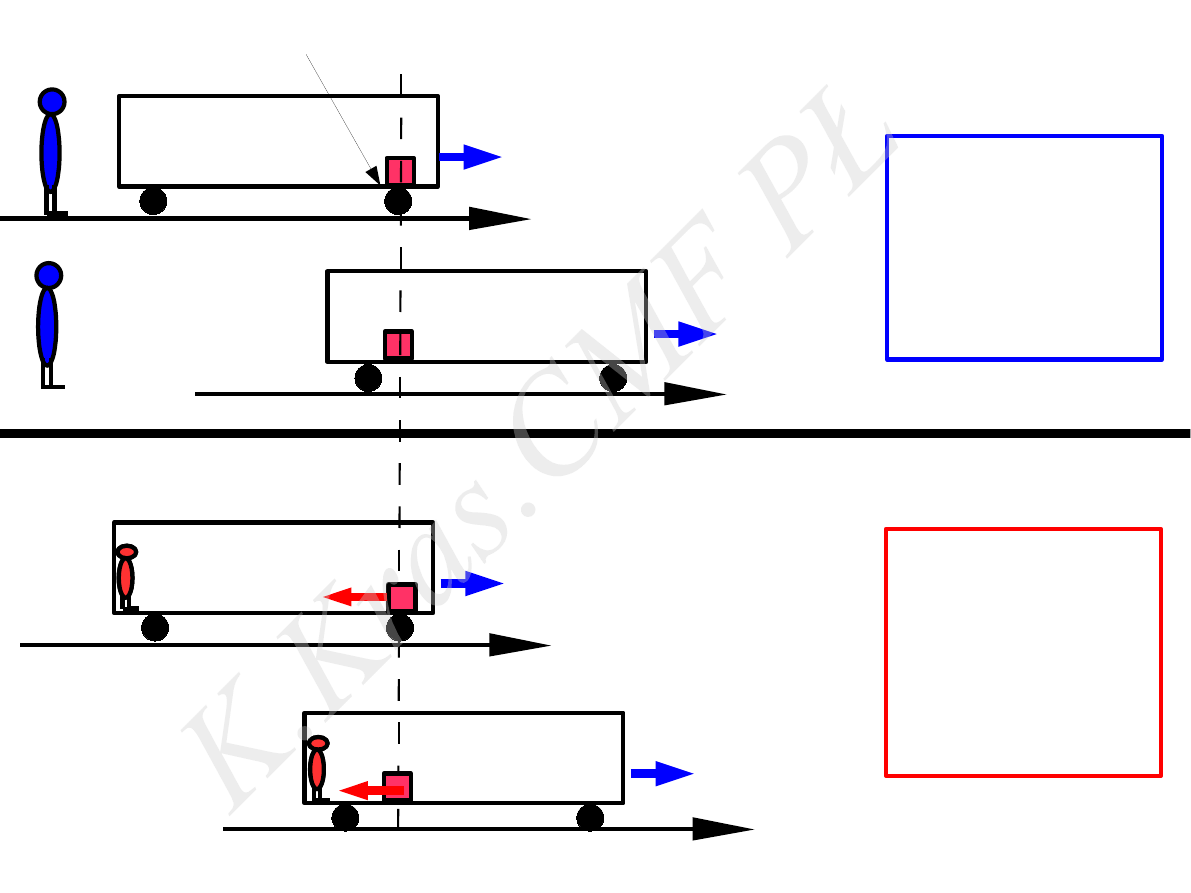
układ nieinercjalny
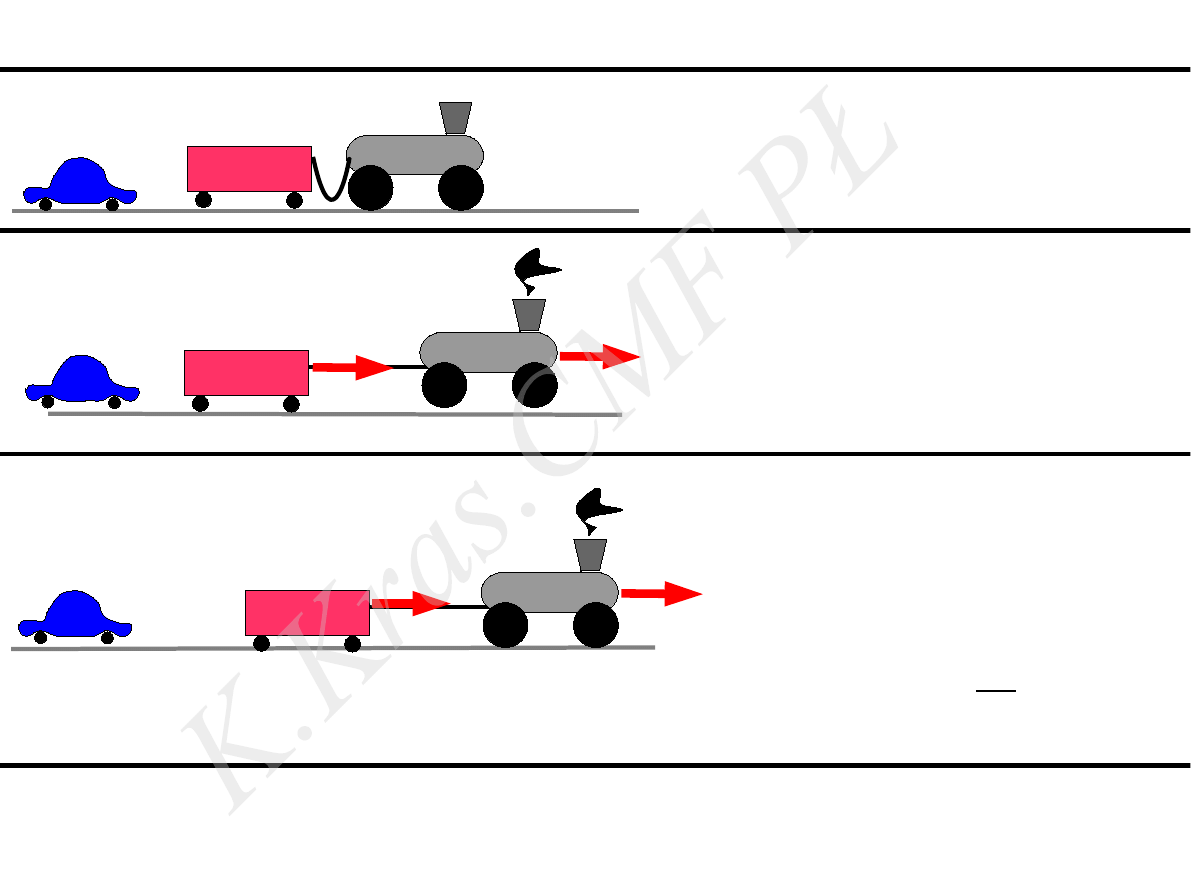
m
układ odniesienia -
samochód
, obiekt obserwowany -
wagon
⃗b =
⃗
F
m
przyspieszenie wagonu
względem
samochodu
⃗
F ≠0
m
⃗b
⃗
F ≠0
m
⃗a
⃗b
siła( pozioma), działająca na wagon –
działa
wynik obserwacji:
obiekt porusza się
z przyspieszeniem
układ inercjalny
II zasada dynamiki
- spełniona
⃗
V
S
=
0
⃗
V
S
=
0
⃗
V
S
=
0
układ odniesienia -
samochód
, obiekt obserwowany -
wagon
⃗b
m
⃗b
⃗b
m
⃗b
⃗b
siła( pozioma), działająca na wagon –
działa
wynik obserwacji:
obiekt spoczywa
II zasada dynamiki –
NIE spełniona
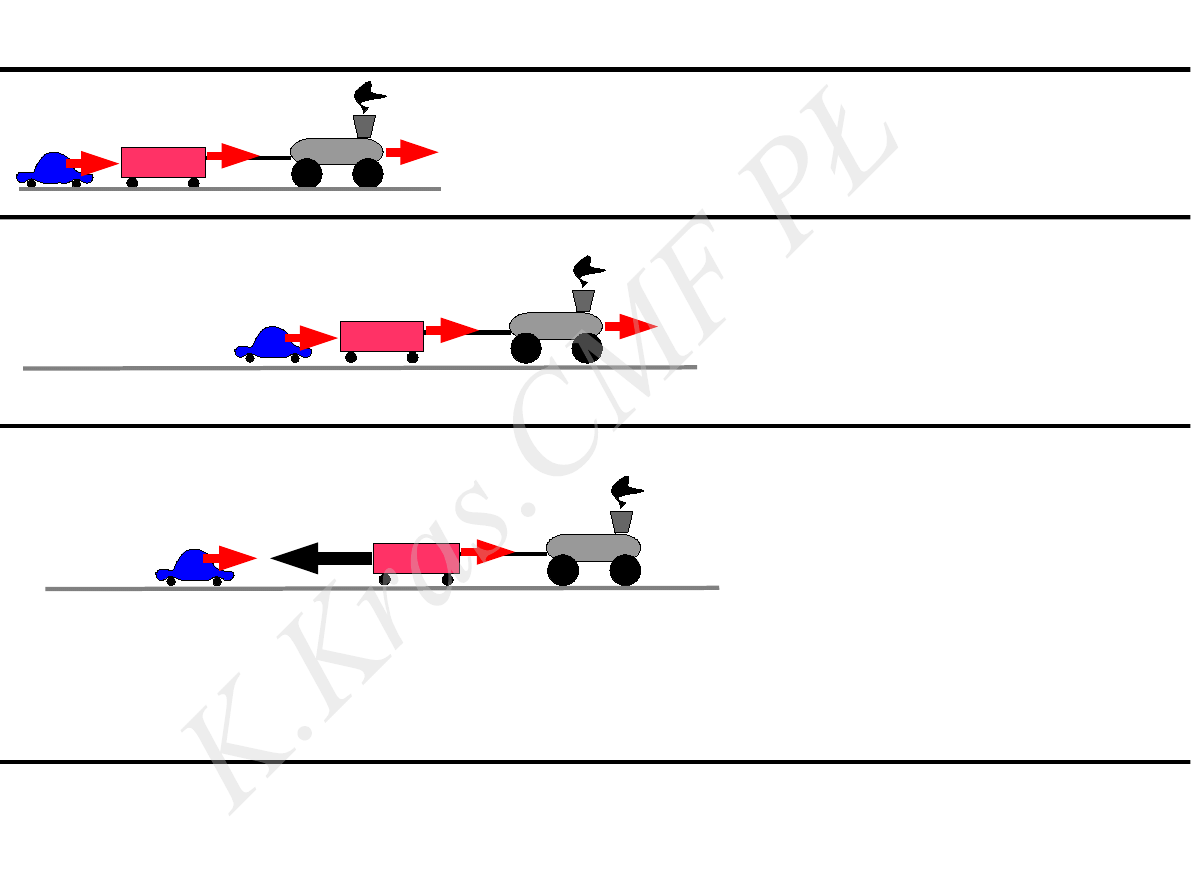
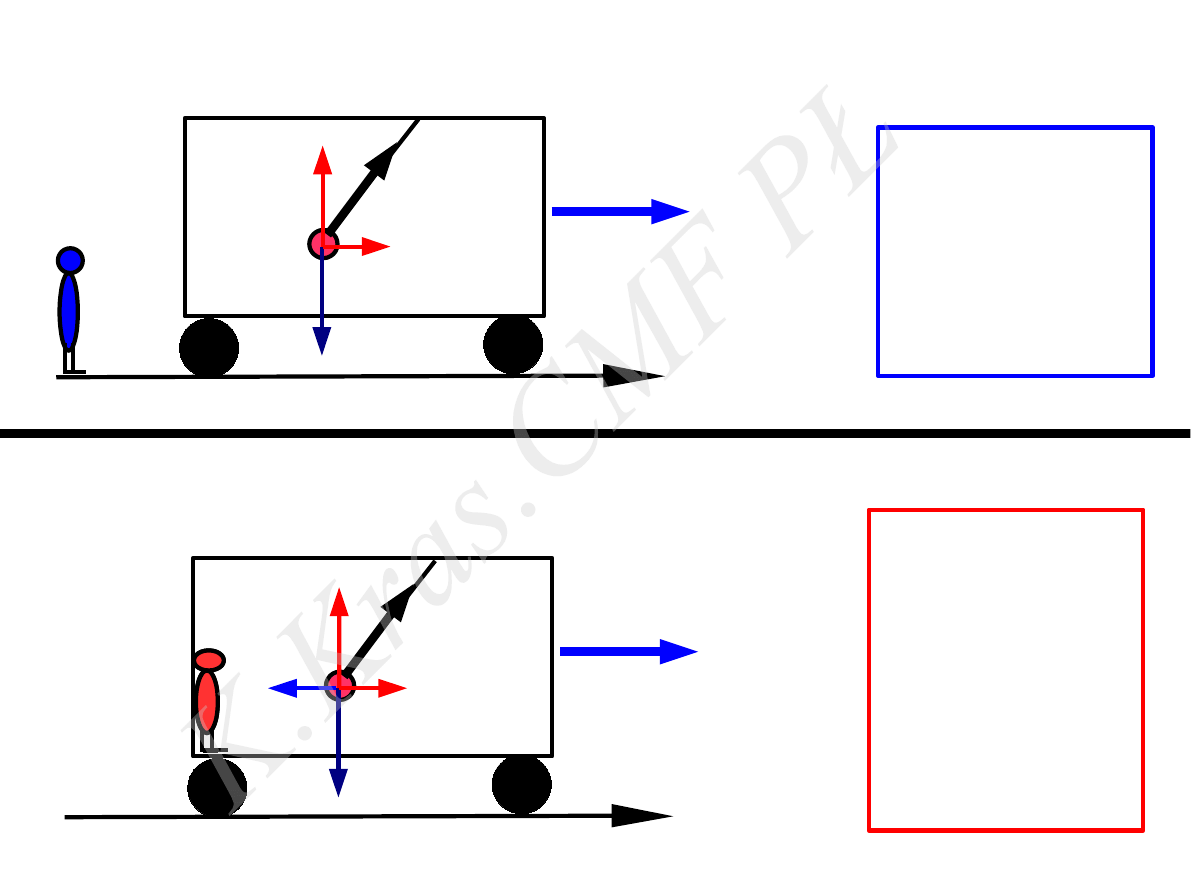
układ nieinercjalny
⃗
F
m
⃗
B =−m ⃗b
⃗b
⃗
F
⃗
F
siła bezwładności
⃗
F
m
⃗
B =−m ⃗b
m⃗a = ⃗F +⃗B = 0
⃗a = 0
⃗b
⃗a = przyspieszenie wagonu wzgl. samochodu
układ nieinercjalny
m a = F −B = 0
dynamiczne równanie ruchu wagonu względem samochodu
„siła bezwładności”
⃗
F
b
=−
m⃗b
M – masa obiektu obserwowanego
b – wartość przyspieszenia układu odniesienia
względem układu inercjalnego
⃗
a
w
⃗
a
w
brak tarcia
⃗
a
w
⃗
F
inercjalny
⃗
F = 0
⃗
a
kl
=
0
x
x
x
x
nieinercjalny
⃗
F ≠ 0
⃗
a
kl
≠
0
⃗
a
w
⃗
F
⃗
a
w
nieinercjalny
x
⃗
N
x
− ⃗
B =0
⃗
a
x
=
0
⃗
a
w
x
⃗
mg
⃗
N
⃗
N
x
⃗
mg
⃗
N
⃗
N
x
⃗
B
inercjalny
⃗
N
x
=
m ⃗
a
w
⃗
a
x
= ⃗
a
w
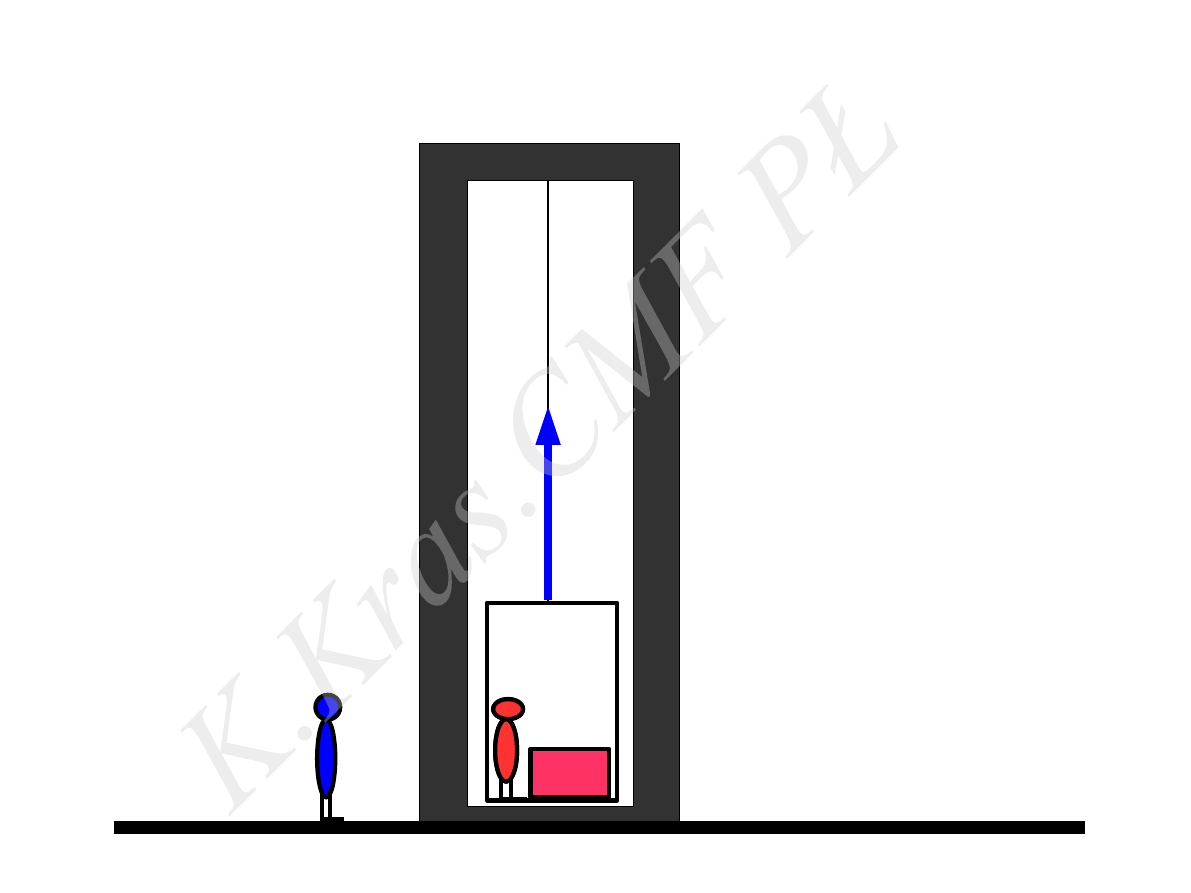
m
⃗
w
⃗a
m
⃗
R
m ⃗g
obserwator na ziemi
układ inercjalny
m a
y
=
R−m g
Y
R = m g+m w = m(g+w)
⃗
w
a
y
=
w
m w = R−m g
⃗a− przyspieszenie klocka wzgl. ziemi
⃗
w− przyspieszenie windy wzgl. ziemi
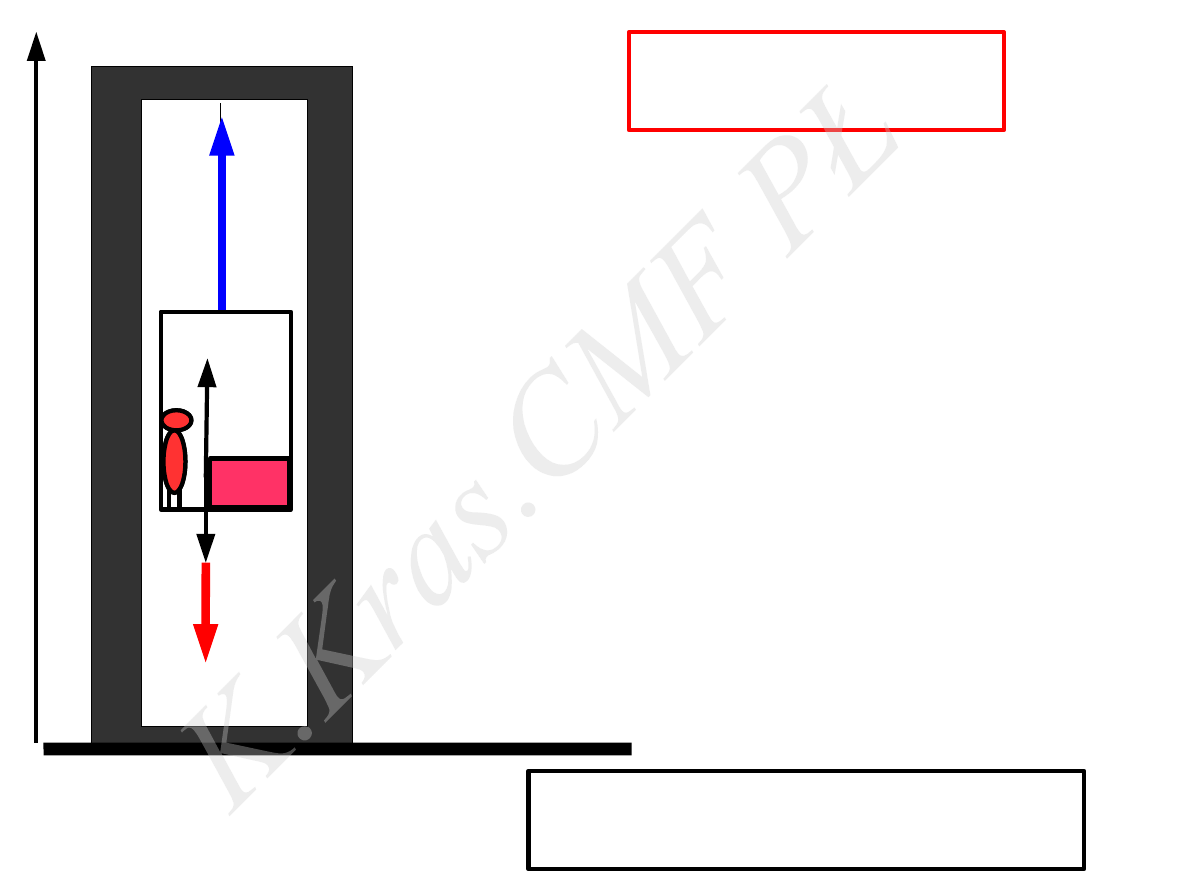
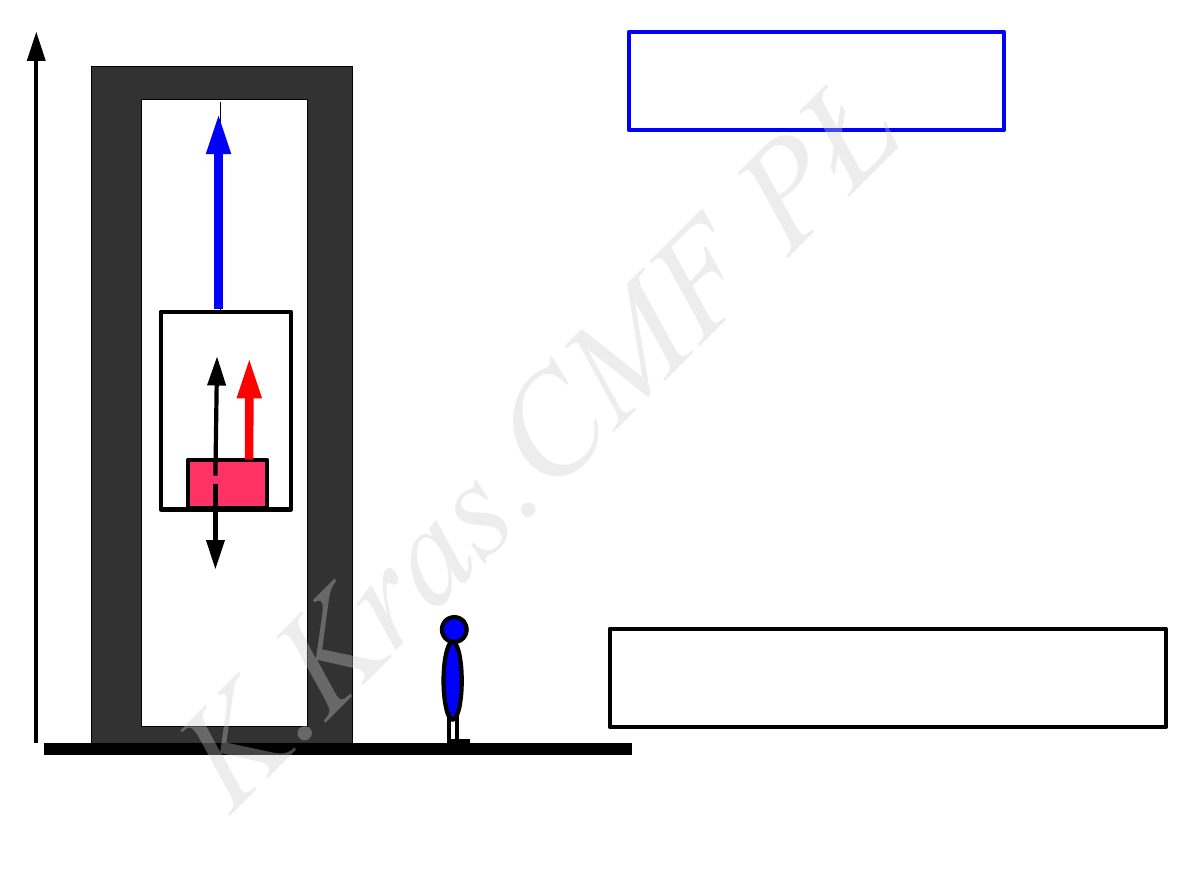
m
⃗
R
m ⃗g
⃗
F
b
m a
y
=
0
a = 0
R = m g+m w = m(g+w)
m a
y
=
R−m g−F
b
=
0
F
b
=
m w
Y
⃗
w
obserwator w windzie
układ nieinercjalny
⃗
w− przyspieszenie windy wzgl. ziemi
⃗a− przyspieszenie klocka wzgl. windy
m a
y
=
R−m g−m w = 0
Document Outline
- Slajd 1
- Slajd 2
- Slajd 3
- Slajd 4
- Slajd 5
- Slajd 6
- Slajd 7
- Slajd 8
- Slajd 9
- Slajd 10
- Slajd 11
- Slajd 12
- Slajd 13
- Slajd 14
- Slajd 15
- Slajd 16
- Slajd 17
- Slajd 18
- Slajd 19
- Slajd 20
- Slajd 21
- Slajd 22
- Slajd 23
- Slajd 24
- Slajd 25
- Slajd 26
- Slajd 27
- Slajd 28
- Slajd 29
- Slajd 30
- Slajd 31
- Slajd 32
- Slajd 33
- Slajd 34
- Slajd 35
- Slajd 36
- Slajd 37
- Slajd 38
- Slajd 39
- Slajd 40
Wyszukiwarka
Podobne podstrony:
Materiały do wykładu 4 (27 10 2011)
Materiały do wykładu 4 (28 10 2011)
Materiały do wykładu 3 (20 10 2011)
Materiały do wykładu 3 (21 10 2011)
Materiały do wykładu 4 (27 10 2011)
Materiały do wykładu 4 (28 10 2011)
Materiały do wykładu 7 (18 11 2011)
materiały do wykładów w 13 Przymus i dyscyplina w klasie szkolnej
Materiały do wykładu 7 (17 11 2011)
VAT w działalności gospodarczej Materialy do wykladu - VAT w dzialalnosci - 2011 rok, dostawy krajow
Materialy do wykladu 1 (06 10 2 Nieznany
Materiały do wykładu 6 (04 11 2011)
materiały do wykładów, w 13 Przymus i dyscyplina w klasie szkolnej
więcej podobnych podstron