
Automatyka i Robotyka
2011/12
Fizyka 1
Materiały do wykładu 7
18 11 2011
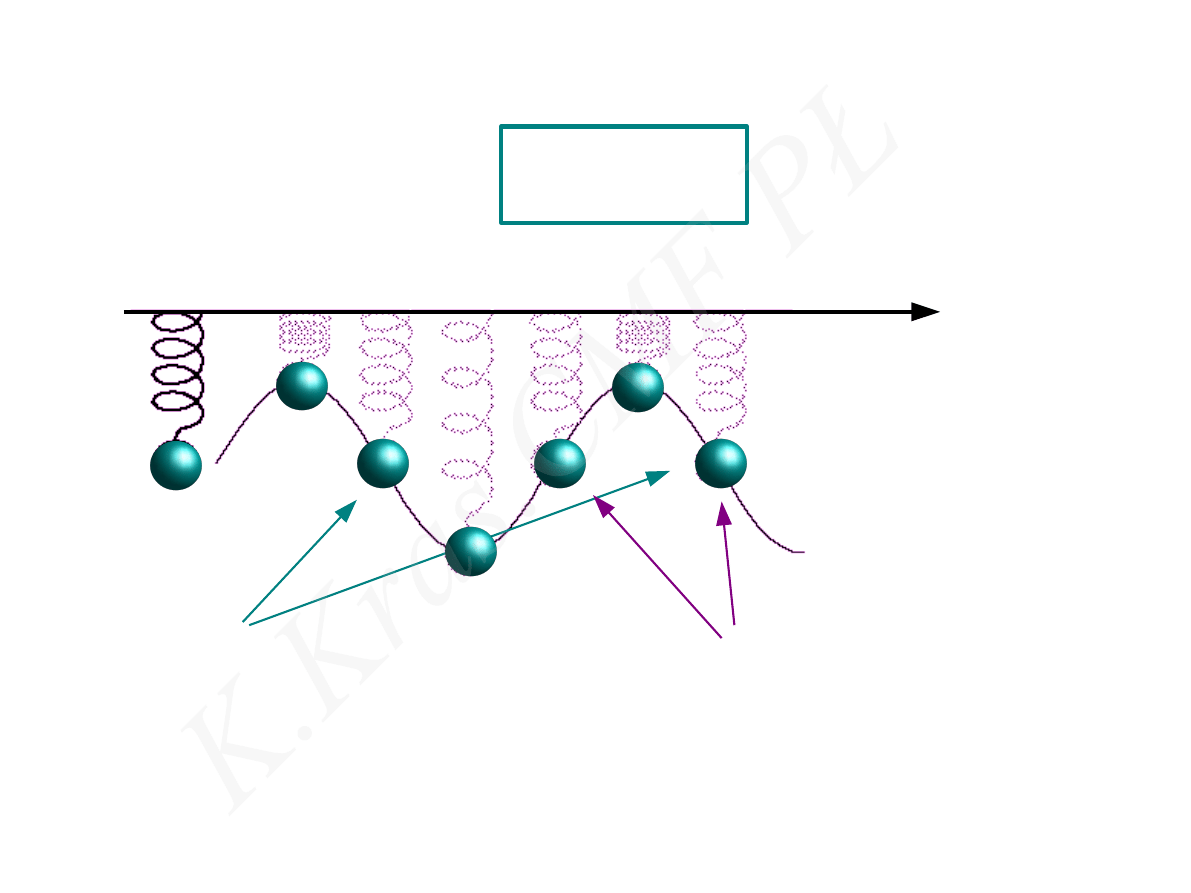
x = Acos(ωt+ϕ)
t
fazy
zgodne
fazy
przeciwne
faza drgania
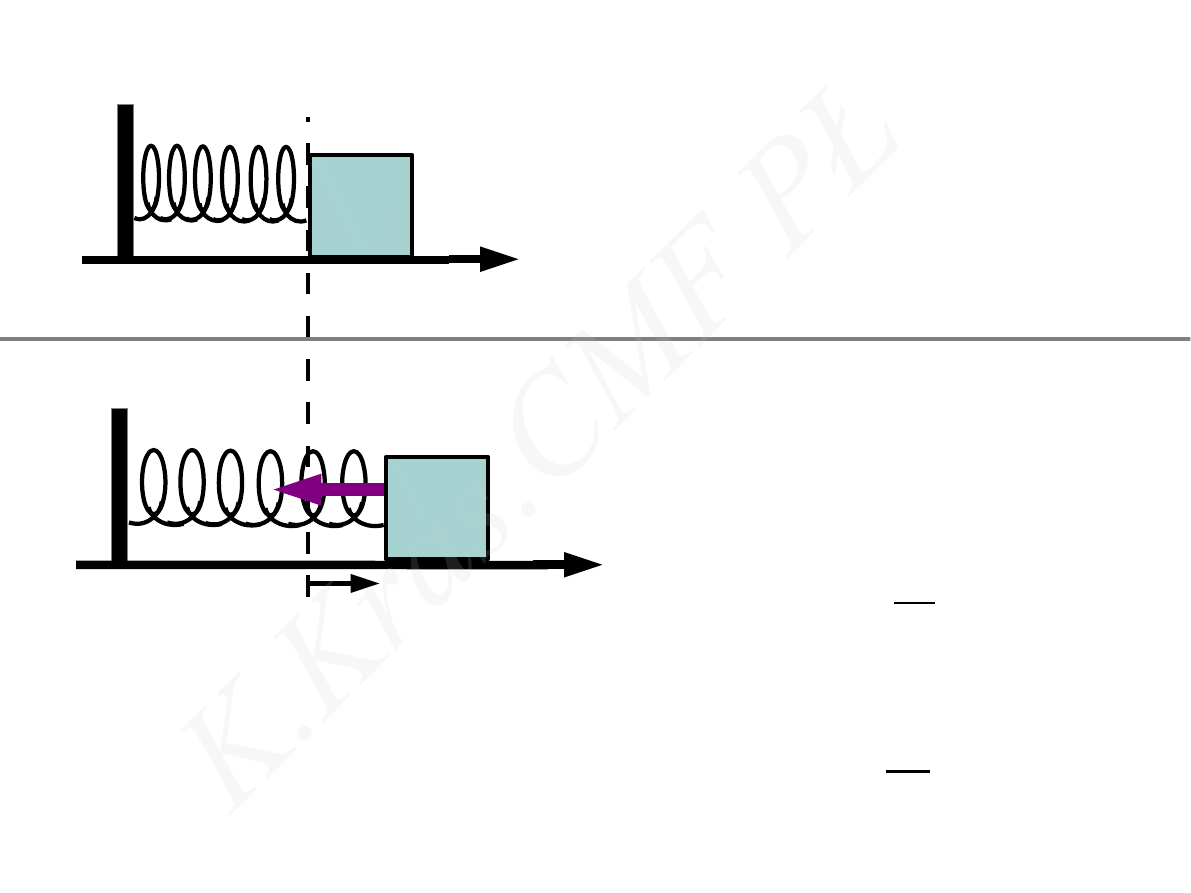
m
k
m
k
x
x
x
⃗
F ( x)
0
0
m a
x
=−
k x
m a
x
=
0
stan równowagi
a
x
=−
k
m
x
ω
2
=
k
m
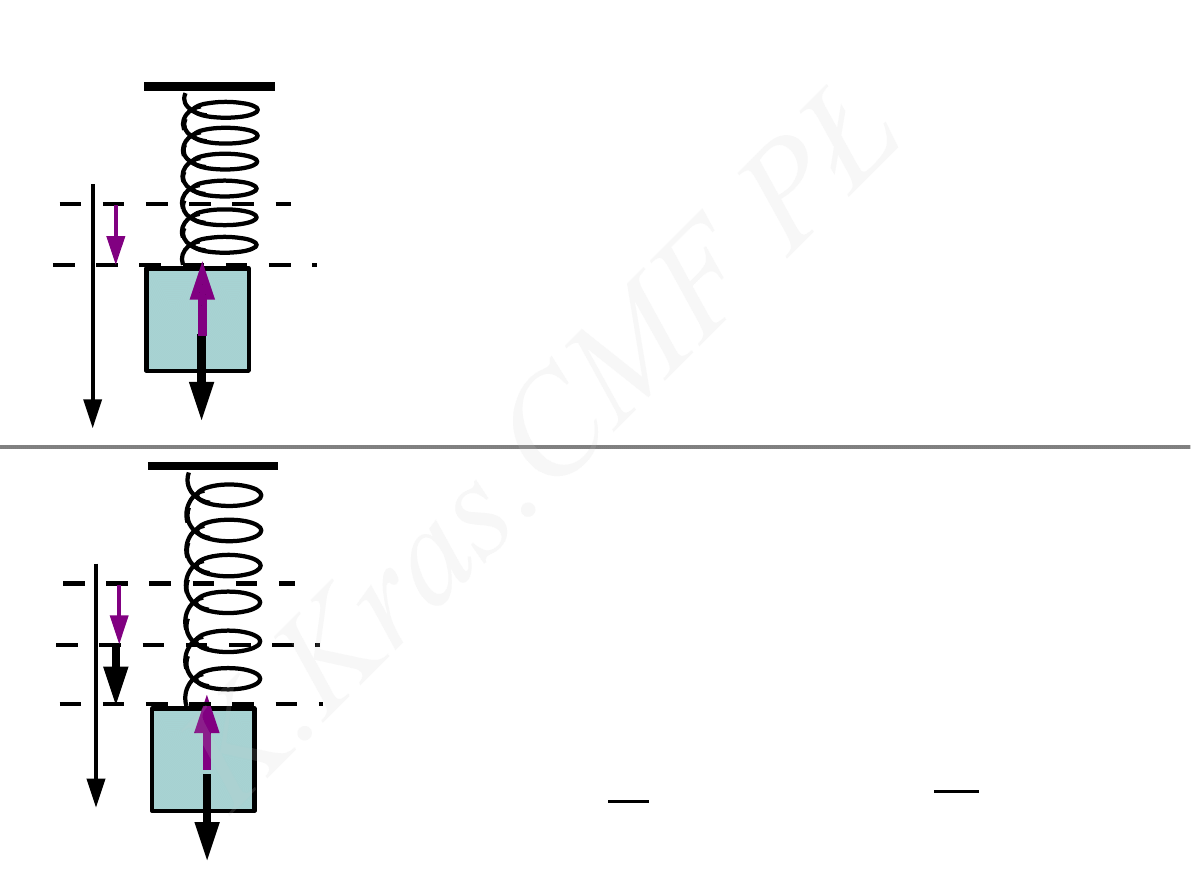
m
k
x
0
stan równowagi
s
mg
k s
m a
x
=
m g−k s=0
m
k
x
0
s
mg
k (s+x)
x
m a
x
=
m g−k (s+x)
m a
x
=
m g−k s−k x
m a
x
=−
k x
a
x
=−
k
m
x
ω
2
=
k
m
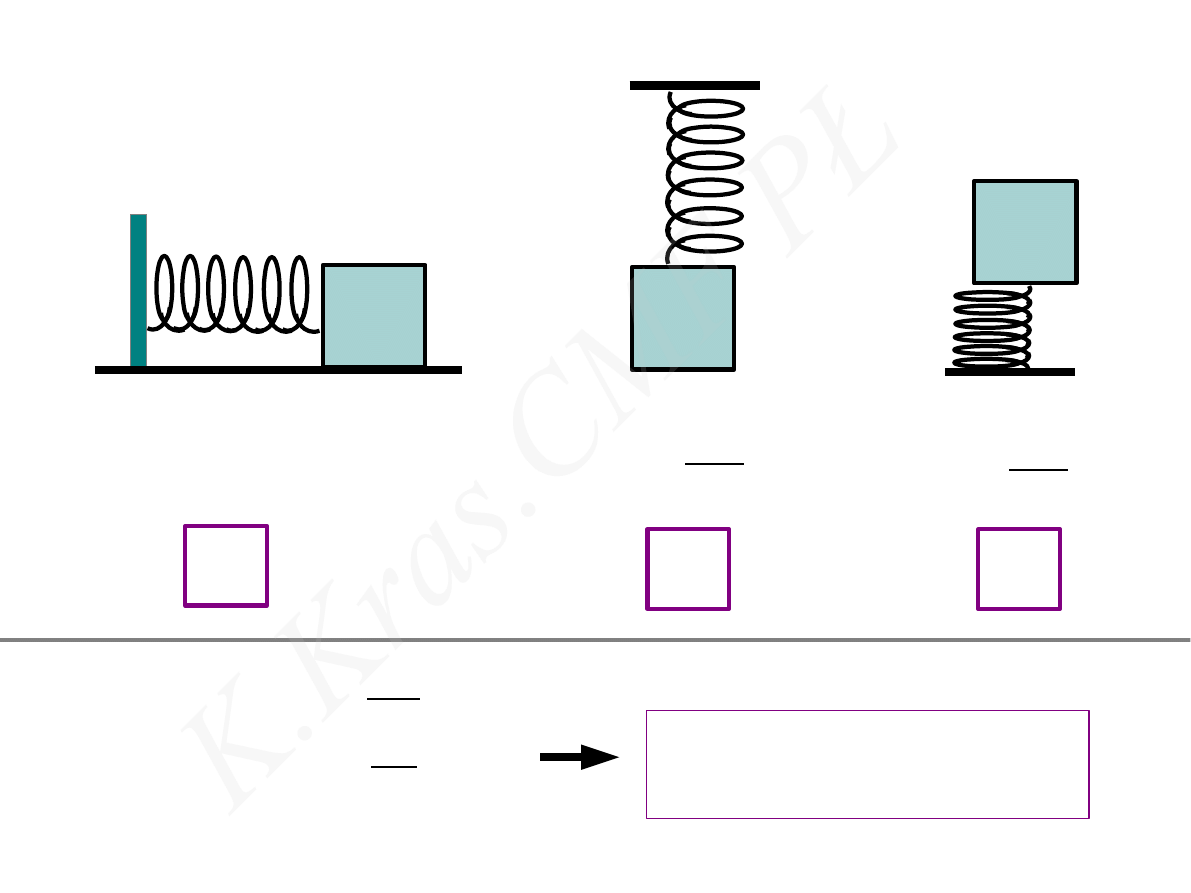
m
k
m
k
m
k
s =
mg
k
s =
mg
k
s = 0
T
1
T
2
T
3
T
1
=
T
2
=
T
3
T = 2 π
√
m
k
g
1
=
const
g
2
=
const
T
1
T
2
T
1
=
T
2
równik
k
m
k
m
⃗p = const
T
1
=
T
2
T
1
T
2
s
s =
mp
k
=
const
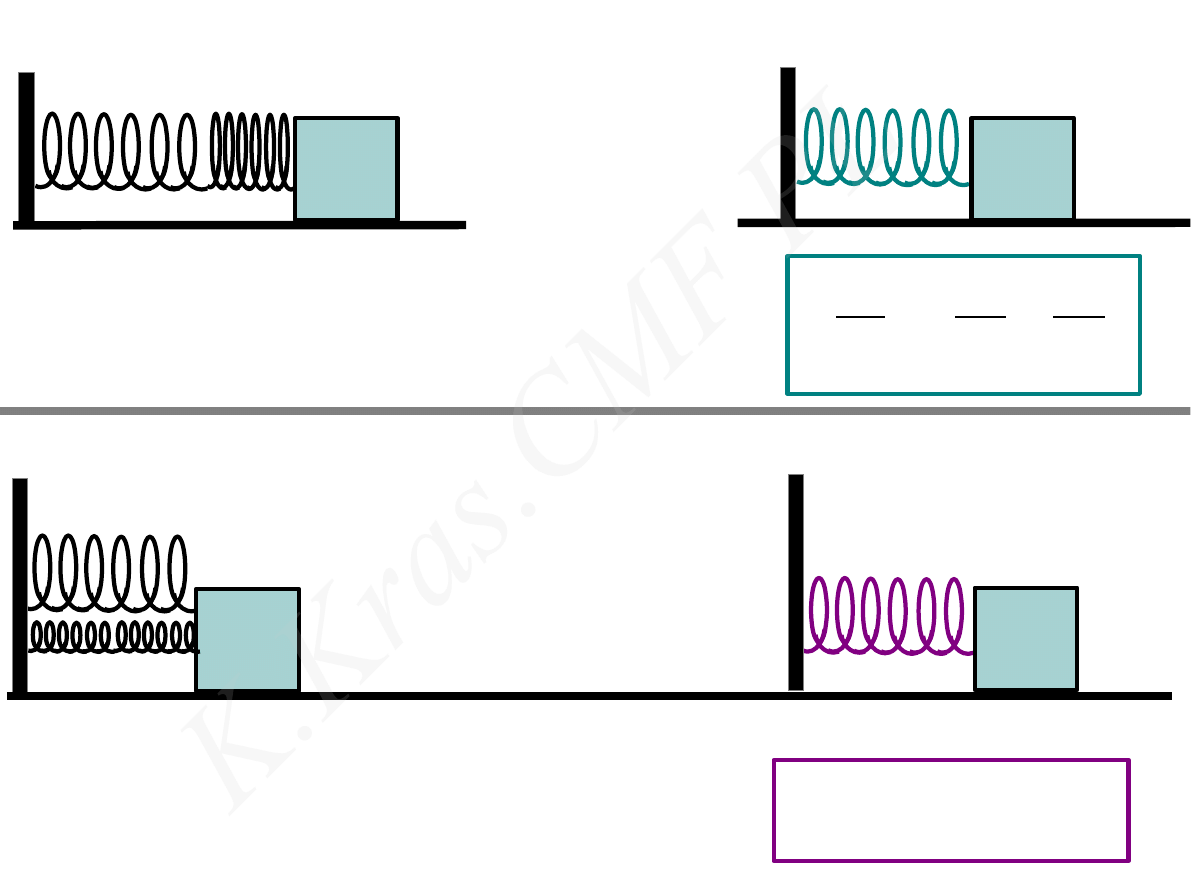
k
1
k
2
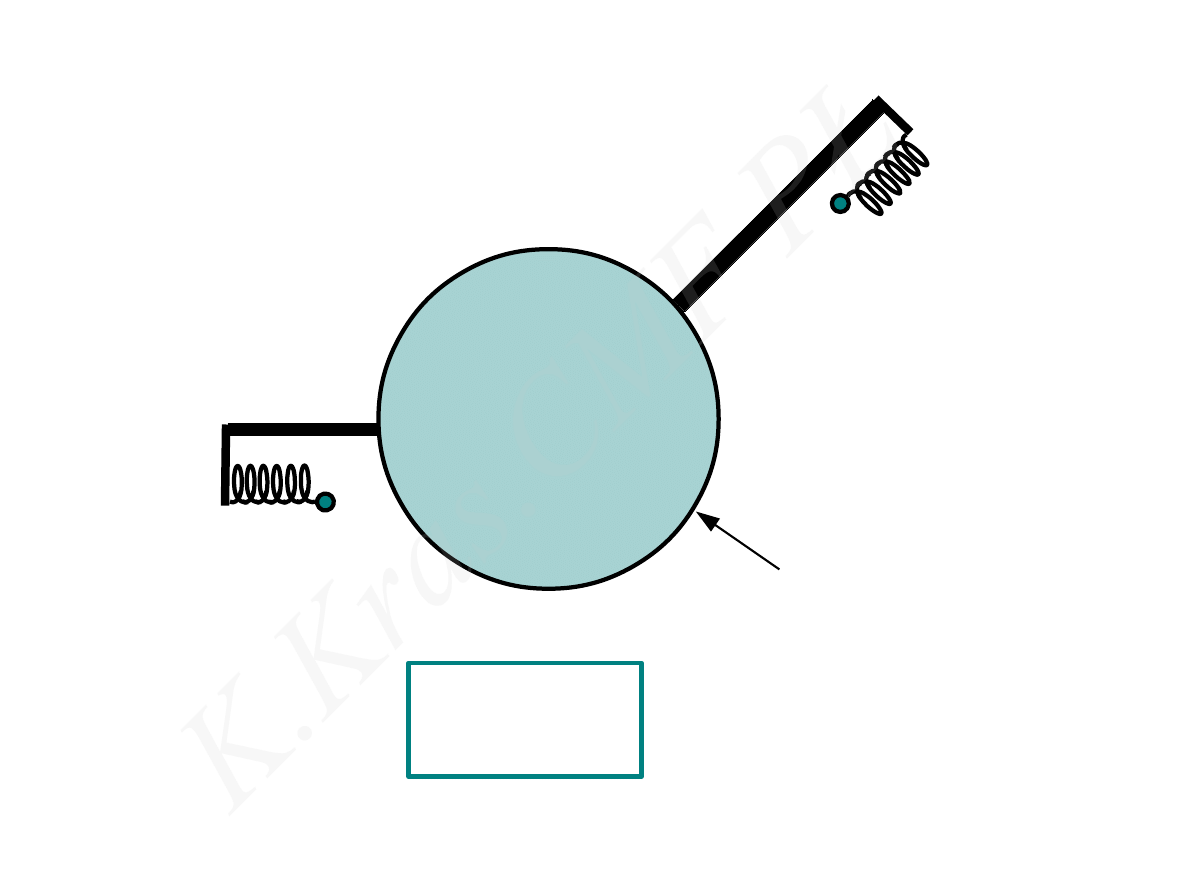
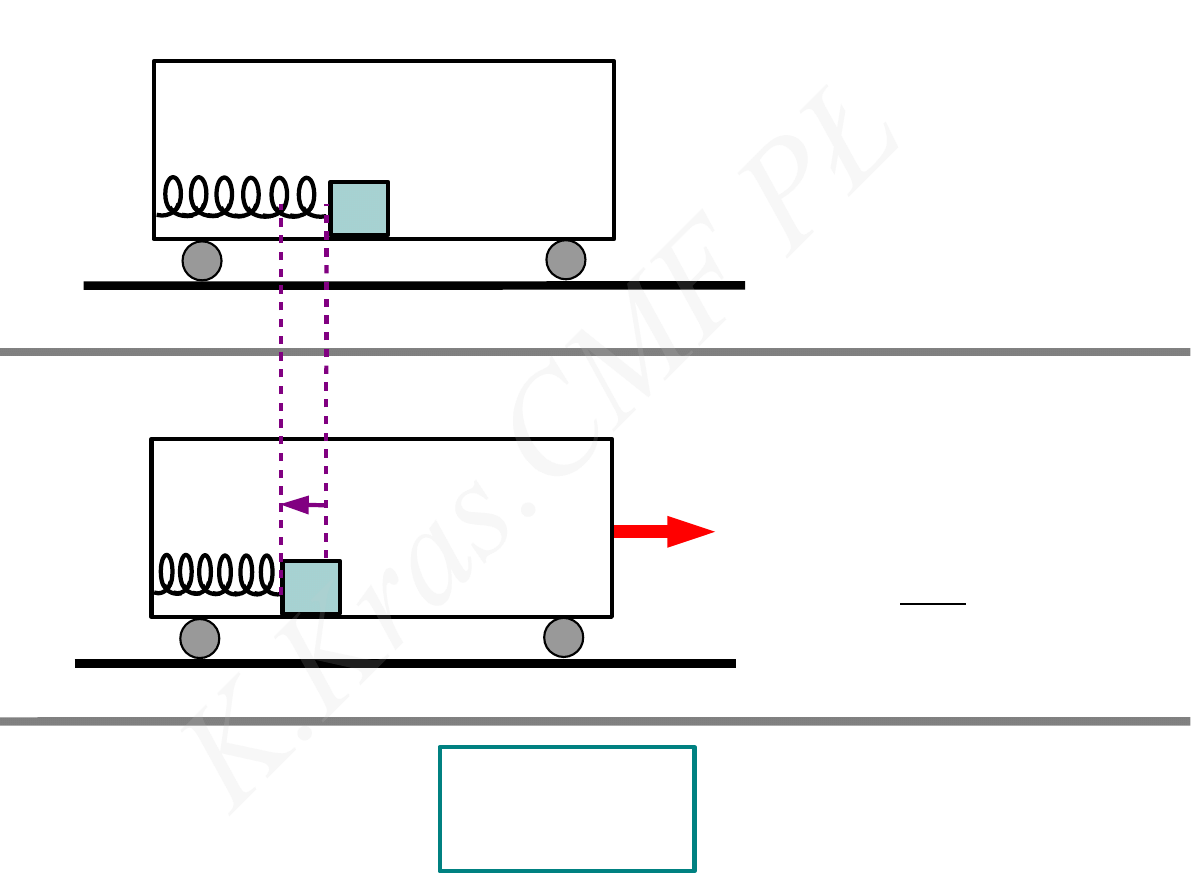
m
k
1
k
2
m
m
m
k
r
połączenie szeregowe
1
k
s
=
1
k
1
+
1
k
2
połączenie równoległe
k
r
=
k
1
+
k
2
k
sz
m
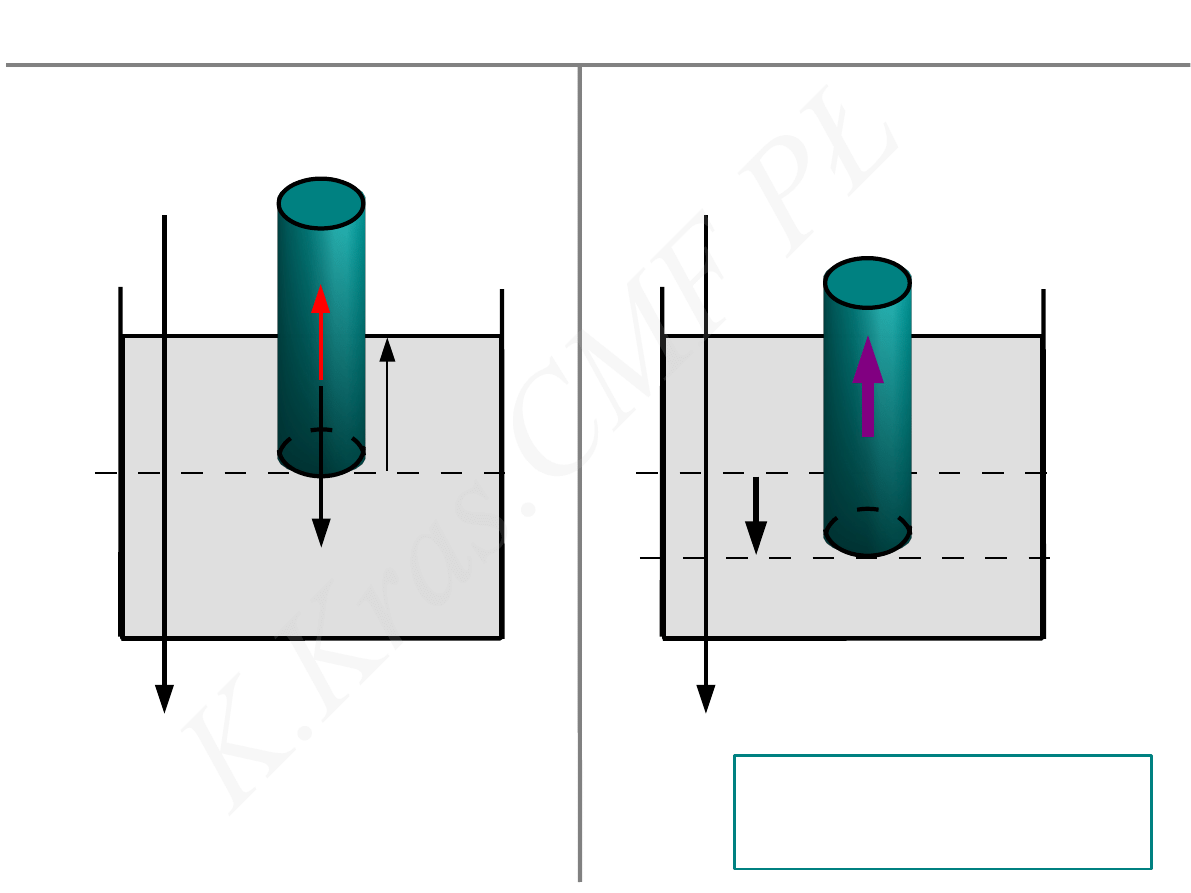
x
0
x
0
x
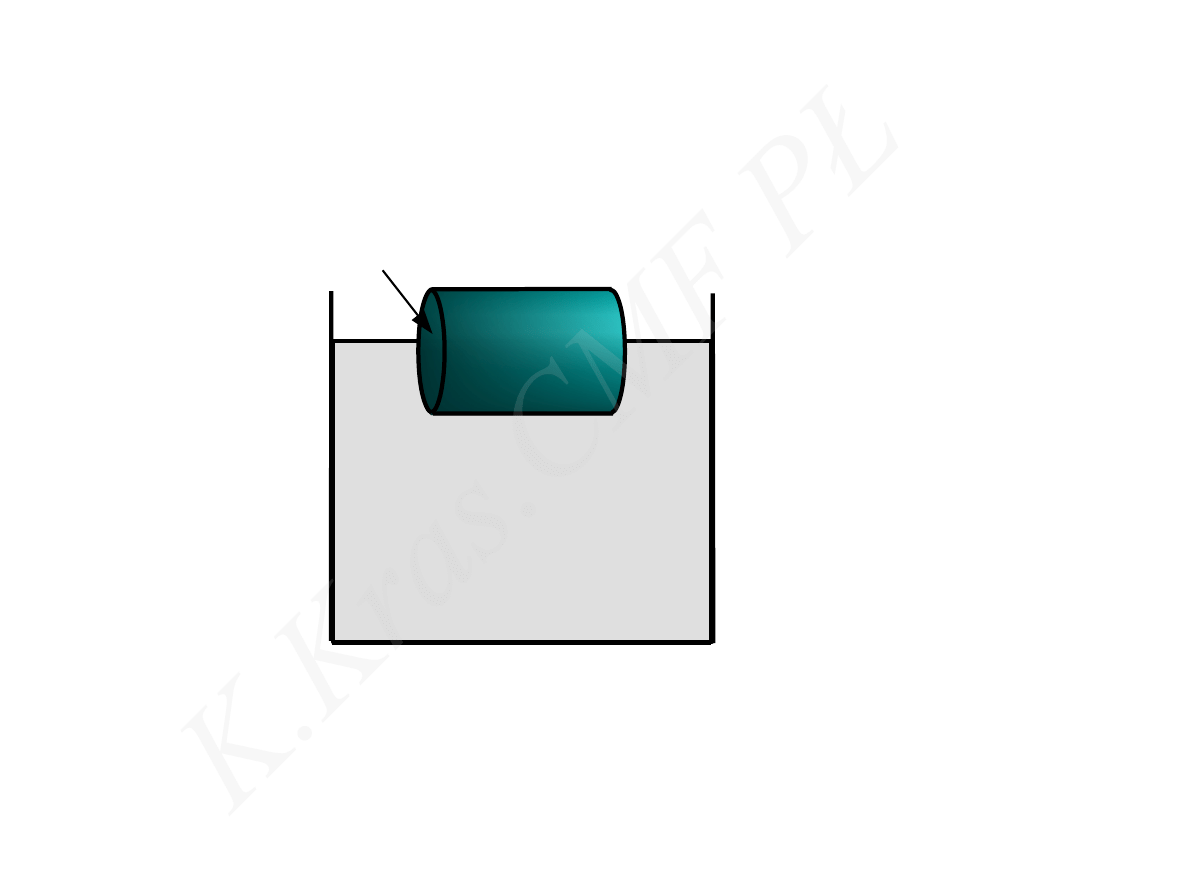
ρ
ρ
F
F = − ρ g D x
położenie równowagi
wychylenie z położenia równowagi
D
D
siła wyporu
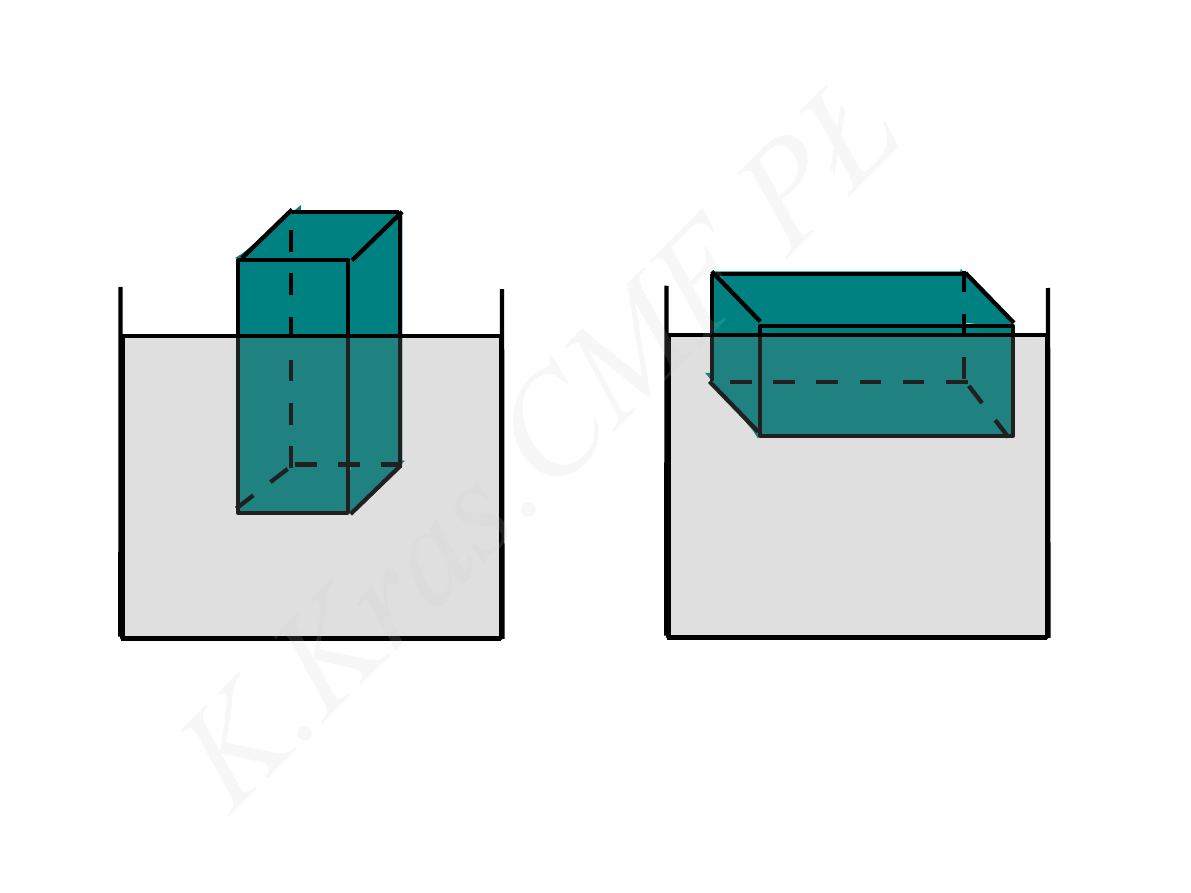
h
m
mg
F
w
m a
x
=
mg−ρ g D h=0
ρ
D
ρ
ρ
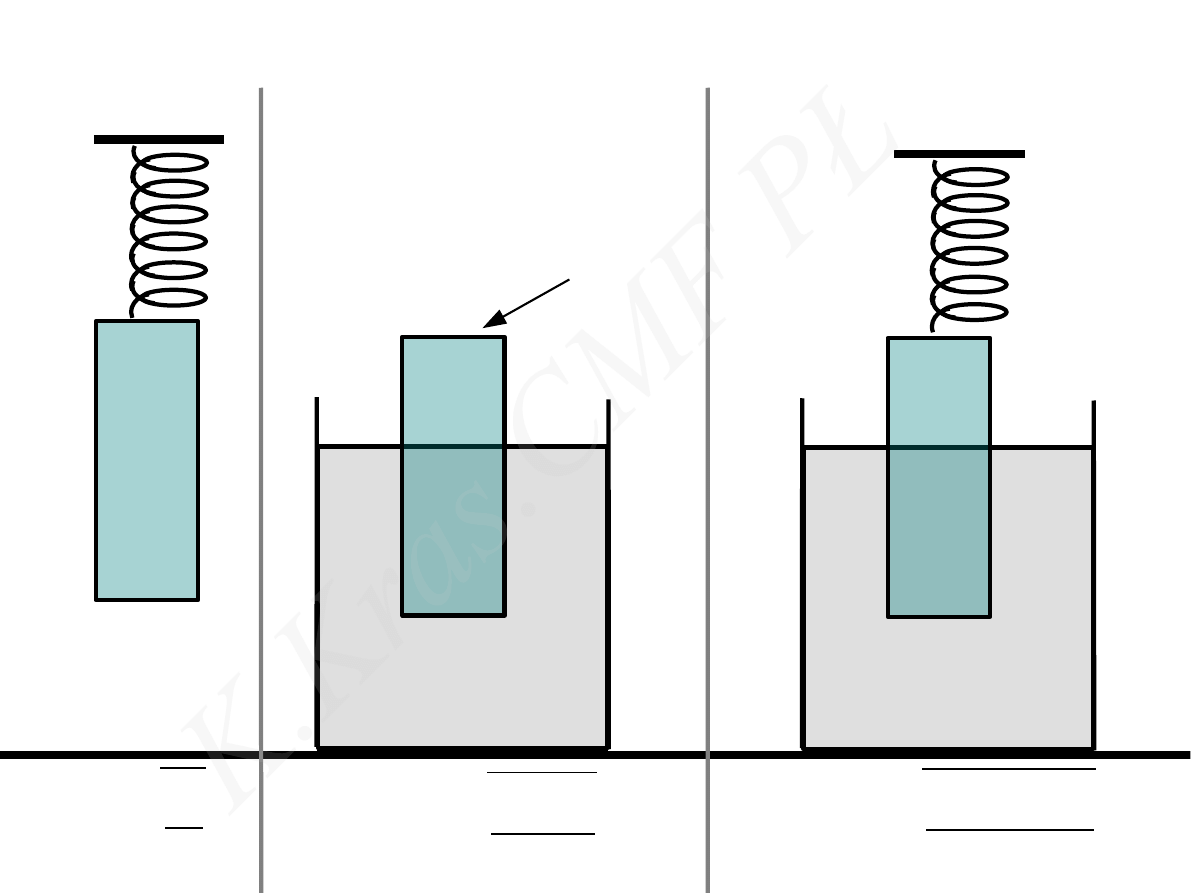
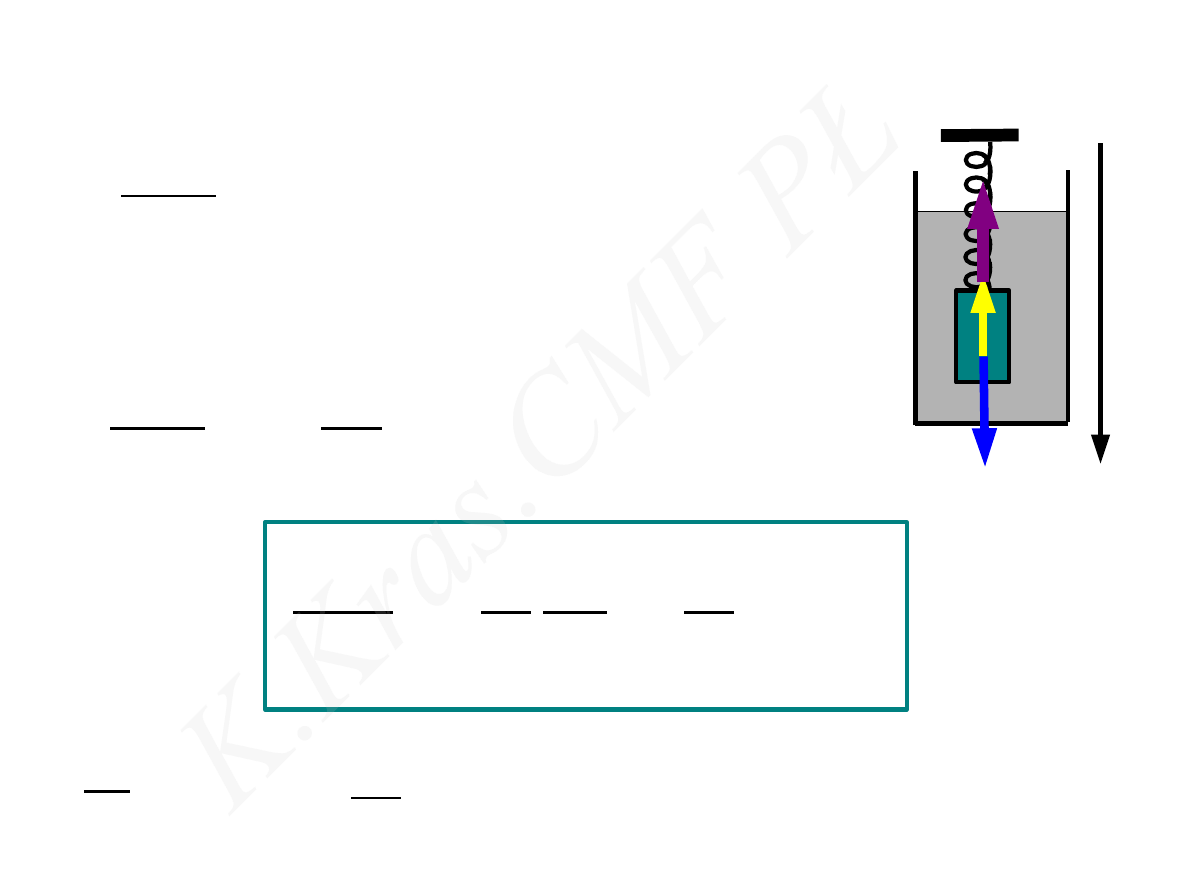
m
k
ρ
m
ρ
m
k
T
1
=
√
k
m
T
2
=
√
ρ
g D
m
D
T
3
=
√
ρ
g D+k
m
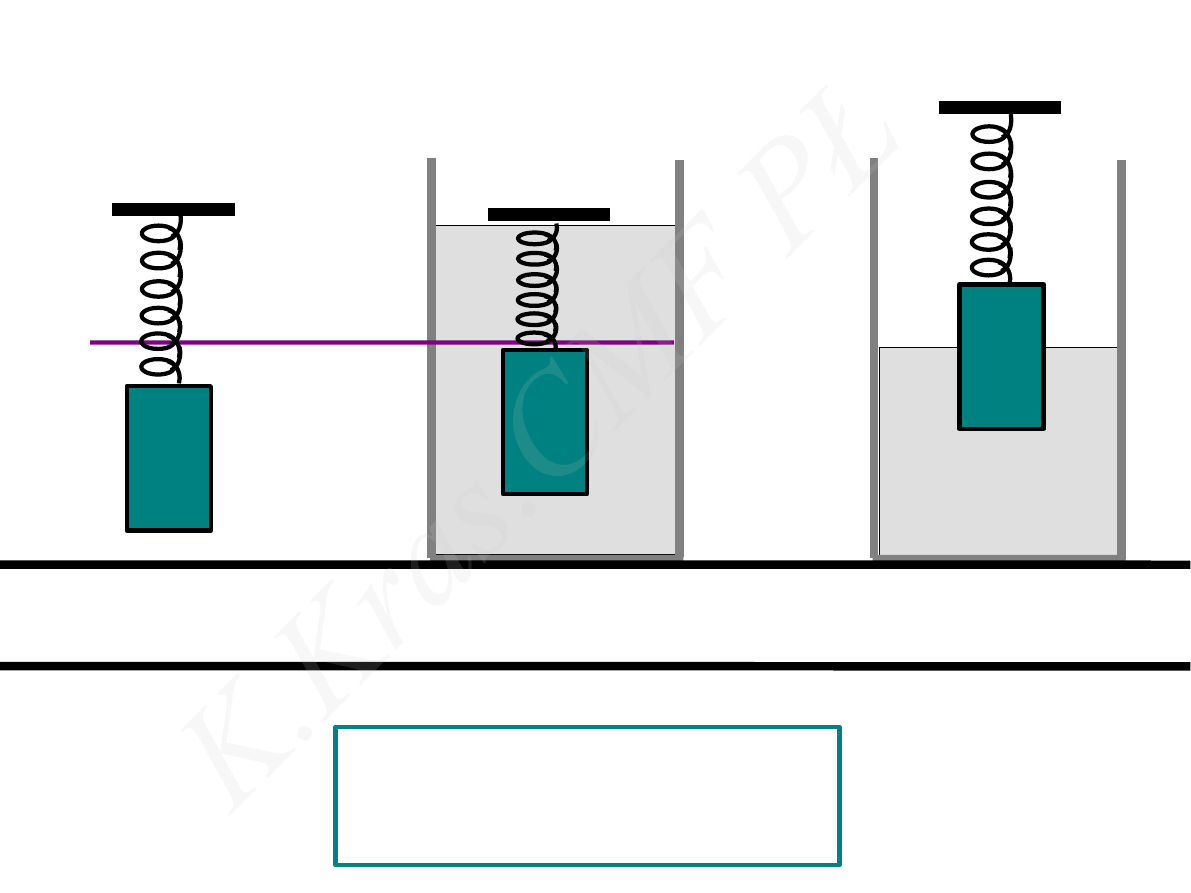
T
1
T
2
T
1
=
T
2
≠
T
3
k
k
T
3
k
całkowite zanurzenie
częściowe zanurzenie

x
0
x<R
x≥R
E =
G M
R
3
x
M
natężenie pola
grawitacyjnego
potencjał pola
grawitacyjnego
natężenie i potencjał pola grawitacyjnego jednorodnej kuli
E =
G M
x
2
V =
−
G M
2R
3
(
3R
2
−
x
2
)
V =
−
G M
x
R
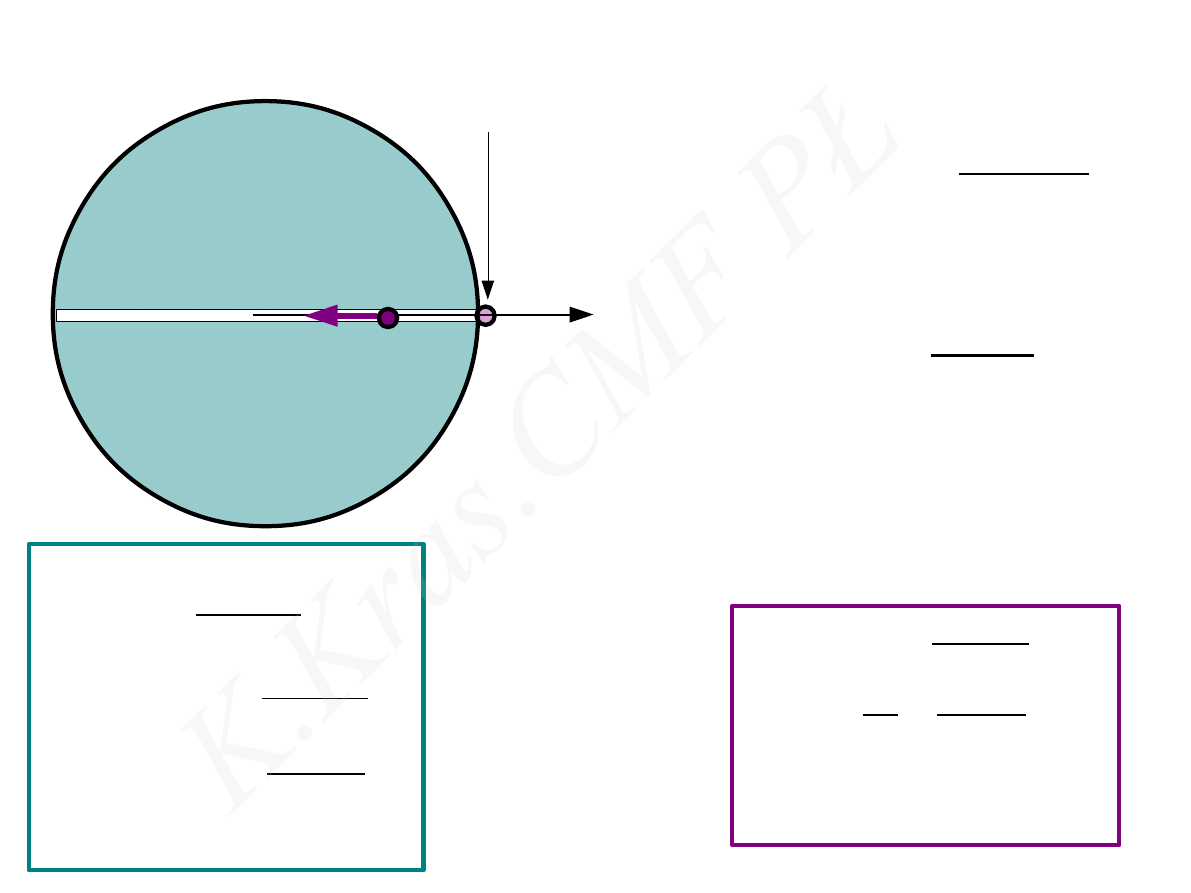
x
R
0
M
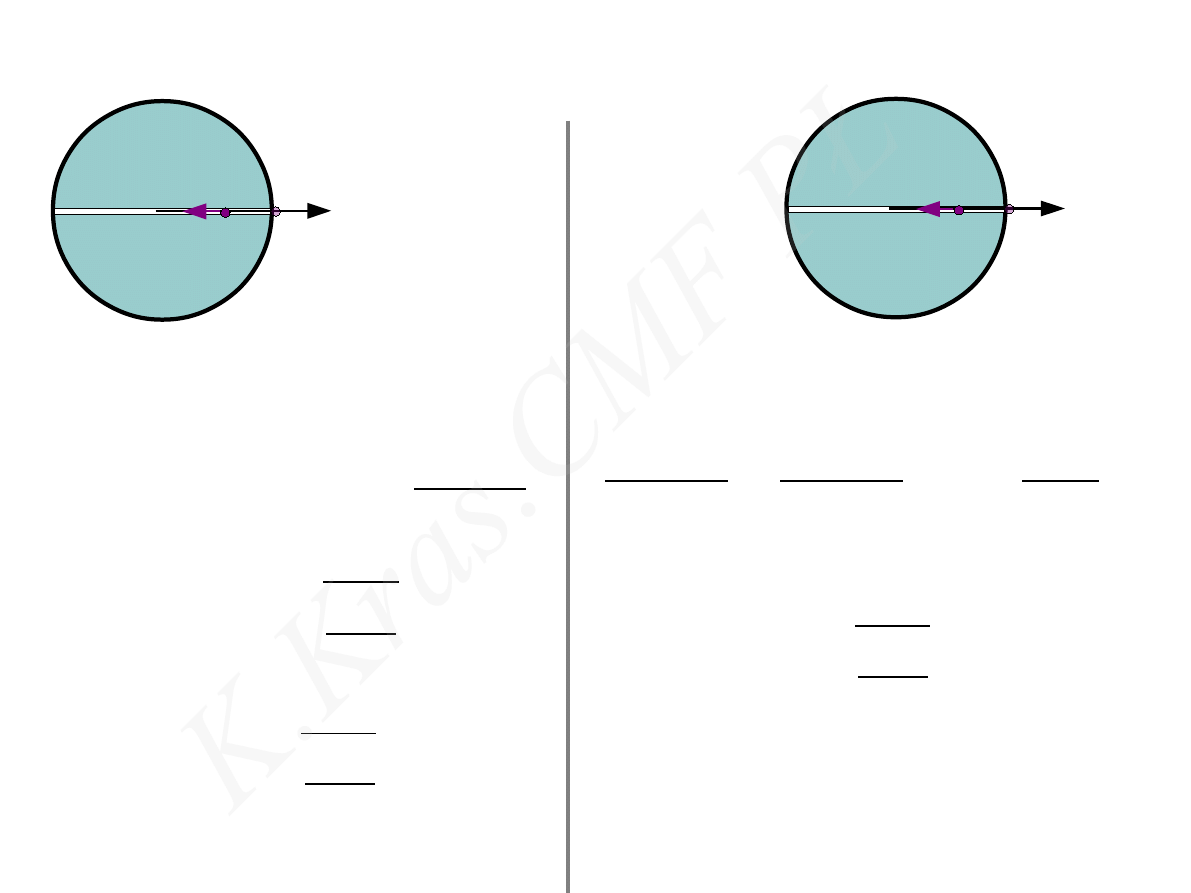
⃗
F
F = −m E =−
G M m
R
3
x
a
x
=−
G M
R
3
x
ciało w tunelu
m
a
x
=−ω
2
x
ω
2
=
G M
R
3
T =2 π
√
R
3
GM
τ = π
2
√
R
3
GM
czas ruchu do środka Ziemi
okres drgań
start
x
R
0
M
⃗
F
m
x
R
0
M
⃗
F
m
ciało w tunelu - prędkość dla x= 0
drganie harmoniczne
zasada zachowania energii
x =R cosω t
V =−R ωsin ω t =−ω
√
R
2
−
x
2
V (0)=−ω R = −
√
GM
R
3
R
V (0)=−
√
GM
R
−
GMm
R
=
−
GMm
2 R
3
3R
2
+
mV
2
2
V =
√
GM
R
x
1
=
A
1
sin t
1
x
2
=
A
2
sin t
2
x = A
1
sin t
1
A
2
sin t
2
=
A sin t
A =
A
1
2
A
2
2
2 A
1
A
2
cos
1
−
2
tg =
A
1
sin
1
A
2
sin
2
A
1
cos
1
A
2
cos
2
ruch wypadkowy - drganie harmoniczne
składanie drgań równoległych
równe okresy
ϕ
1
=ϕ
2
A
1
=
A
2
⇒
A=2A
1
1
−
2
=
A
1
=
A
2
⇒
A=0
x
1
=
A
1
sin
1
t
1
x
2
=
A
2
sin
2
t
2
składanie drgań równoległych
różne okresy
T
T/3
ruch okresowy nieharmoniczny
1
=
2
=
0
2
=
3
1
x
x
t
t
x
1
=
A
1
cos t
x
2
=
A
2
cos t
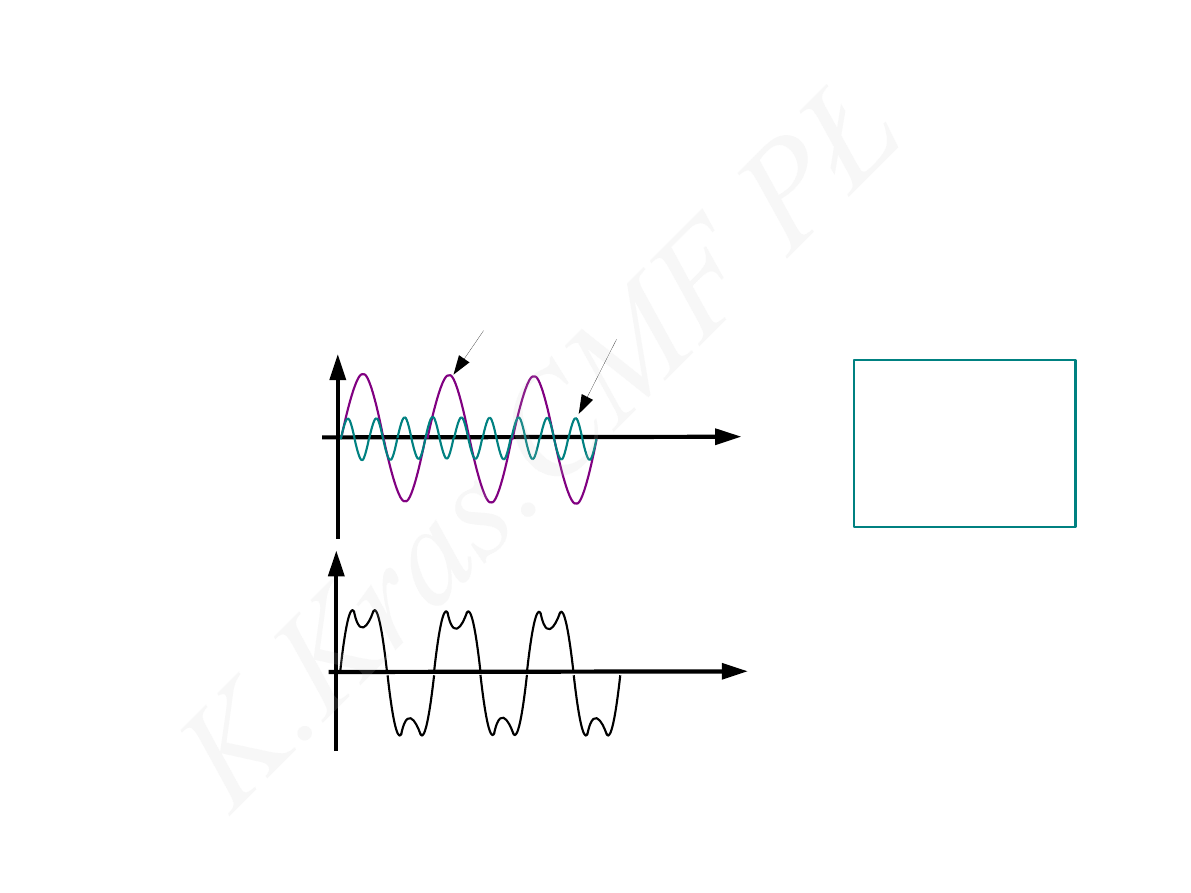
ruch wypadkowy – dudnienia
składanie drgań równoległych
różne okresy
At =
A
1
2
A
2
2
2 A
1
A
2
cos t
okres dudnień
T
d
=
2
T
d
=
2
x = A sin t
y = B sin t
y =
B
A
x
x
y
A
B
x
−
A
−
B
parametryczne równania toru
równanie toru
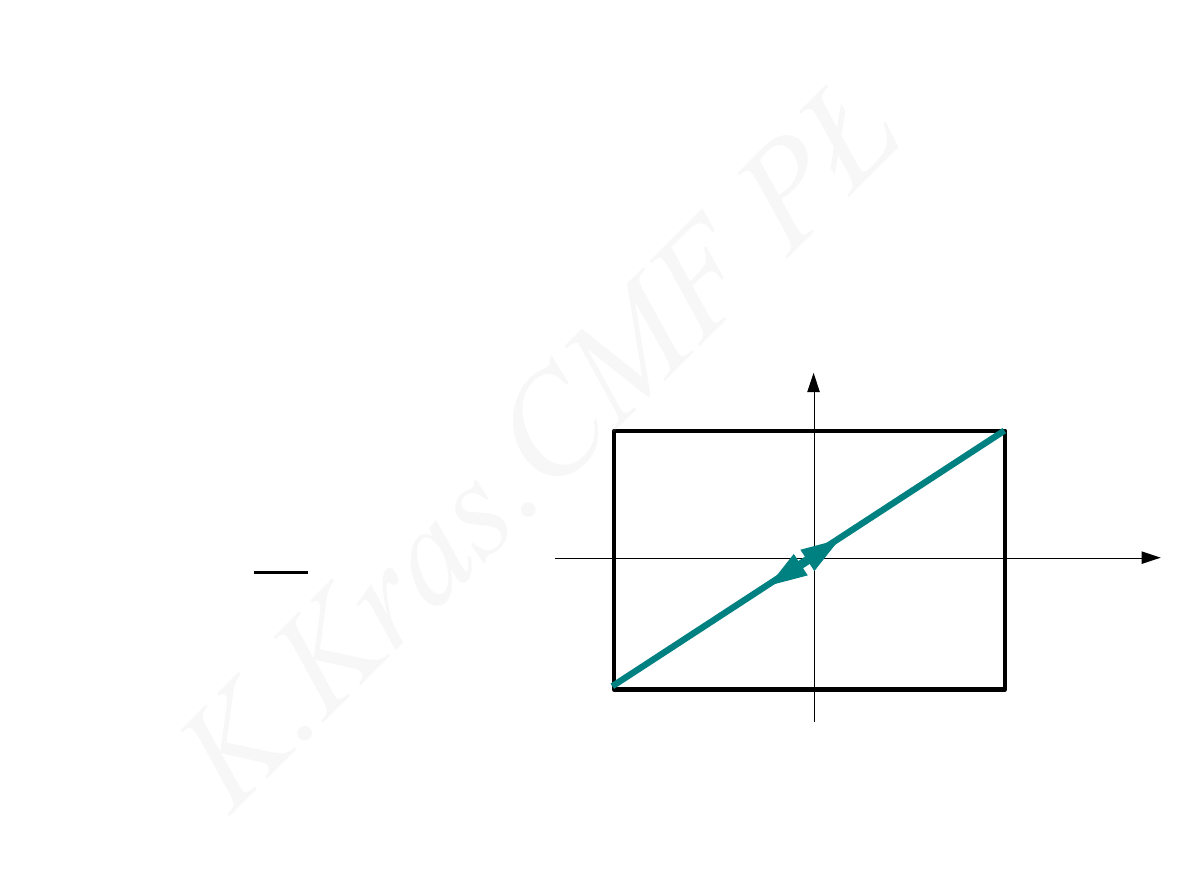
składanie drgań prostopadłych
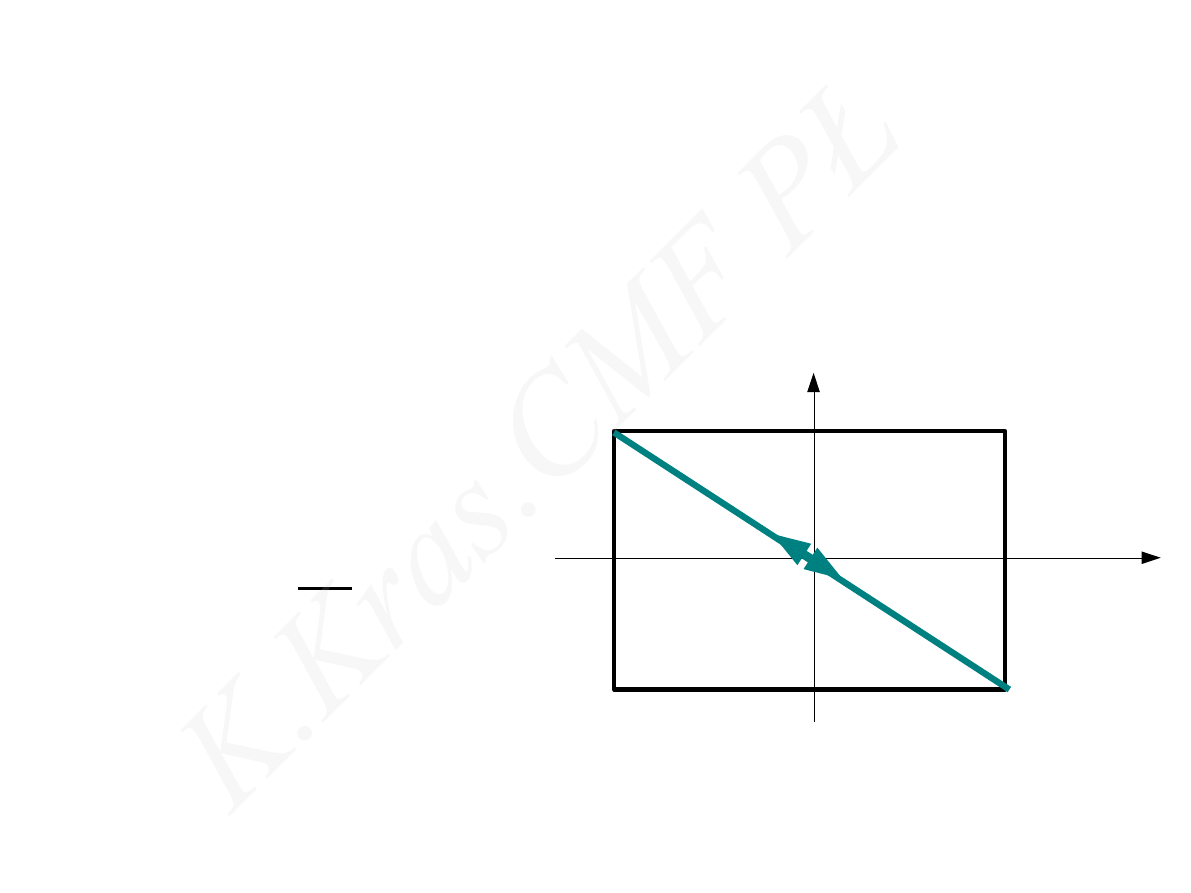
x = A sin t
y = B sin t
y =−
B
A
x
x
y
A
B
x
−
A
−
B
parametryczne równania toru
równanie toru
składanie drgań prostopadłych
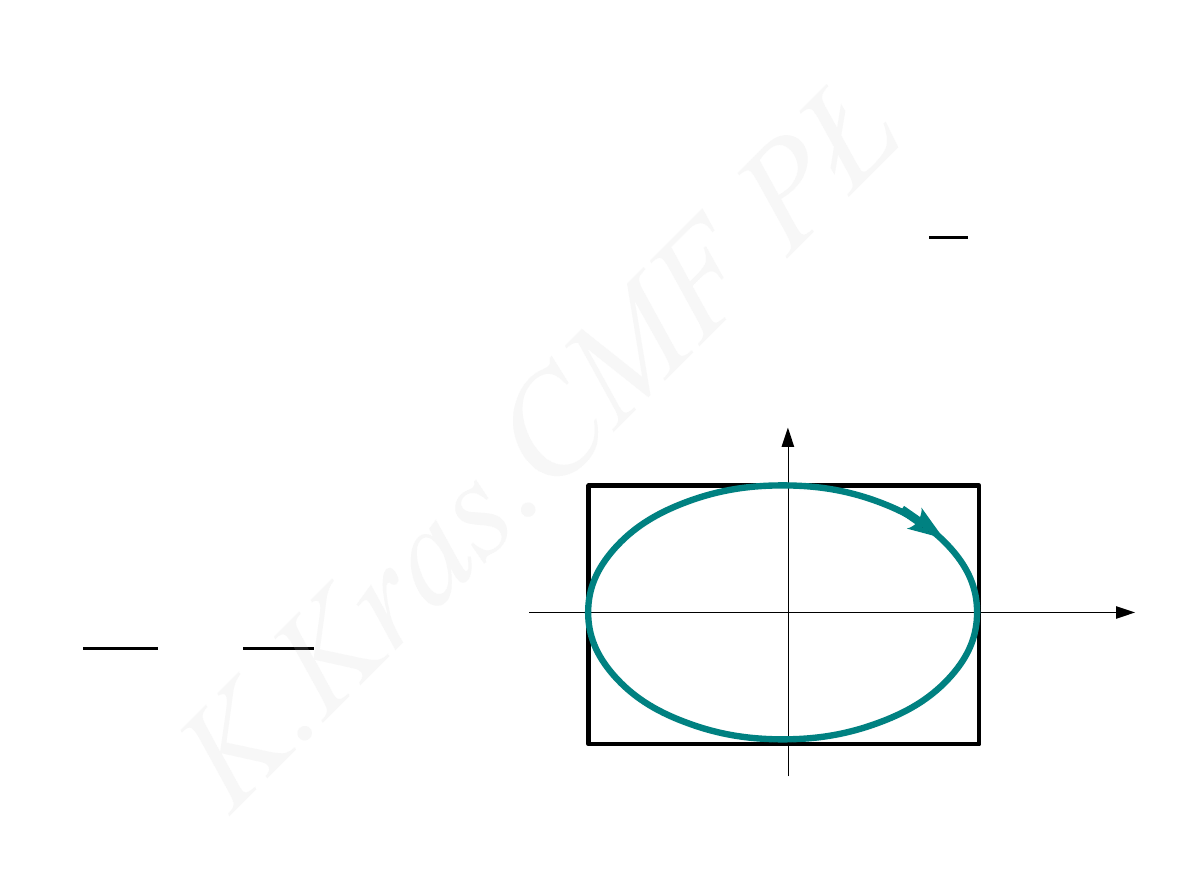
x = A sin t
y = B sin t
2
x
2
A
2
y
2
B
2
=
1
x
y
A
B
x
−
A
−
B
parametryczne równania toru
równanie toru
składanie drgań prostopadłych
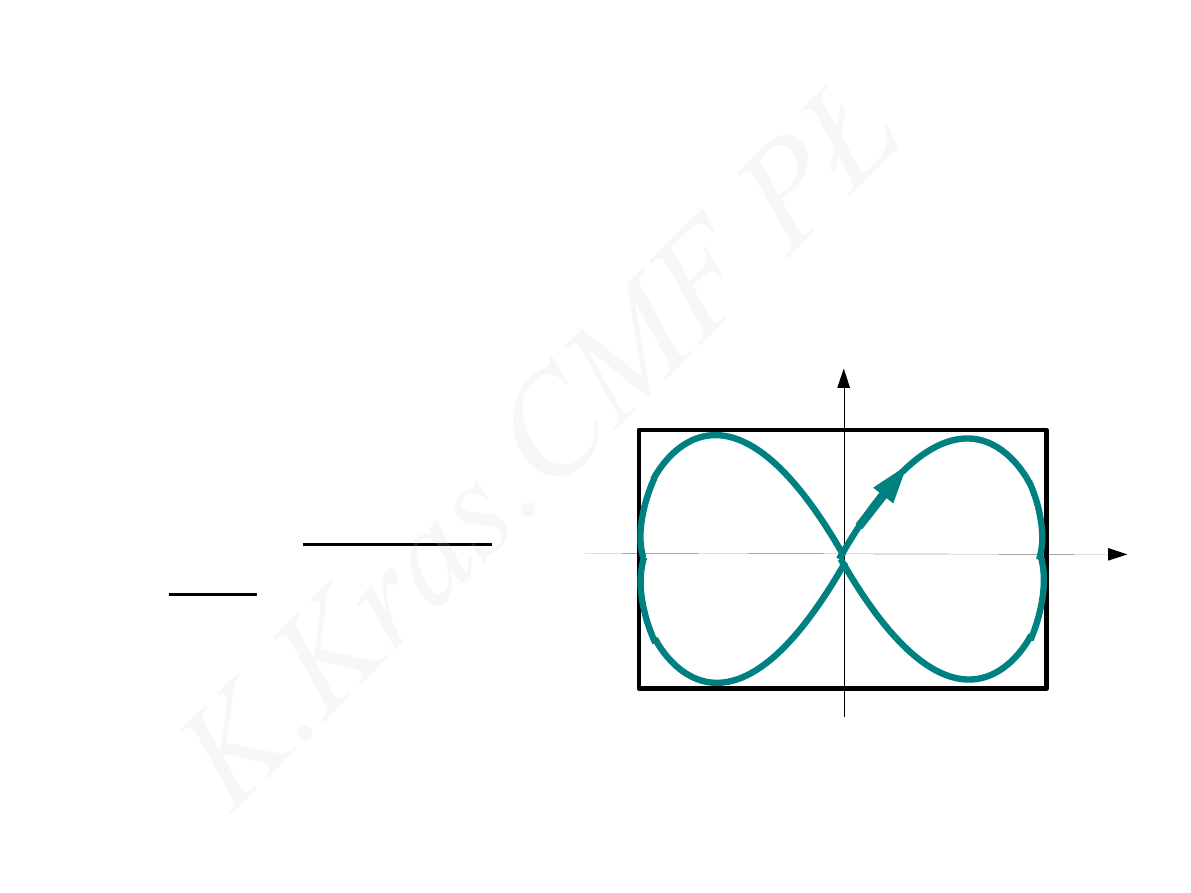
x = A sin t
y = A sin2 t
y =
2 x
A
A
2
−
x
2
x
y
A
B
−
A
−
B
parametryczne równania toru
równanie toru
składanie drgań prostopadłych
złożenie drgań harmonicznych prostopadłych
równe pulsacje
parametryczne równania toru
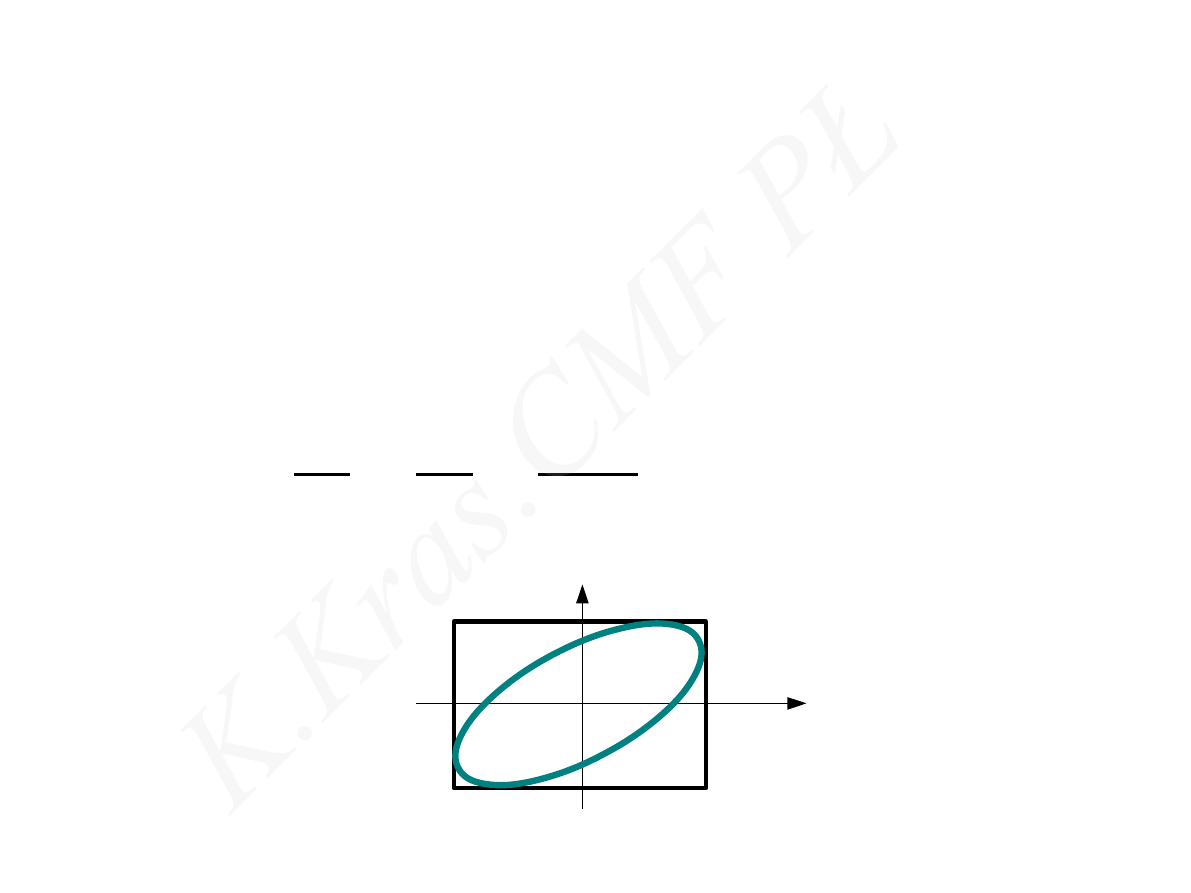
x = Acos t
y = B cos t−
równanie toru
x
2
A
2
y
2
B
2
−
2 x y
A B
cos = sin
2
x
y
A
B
x
−
A
−
B
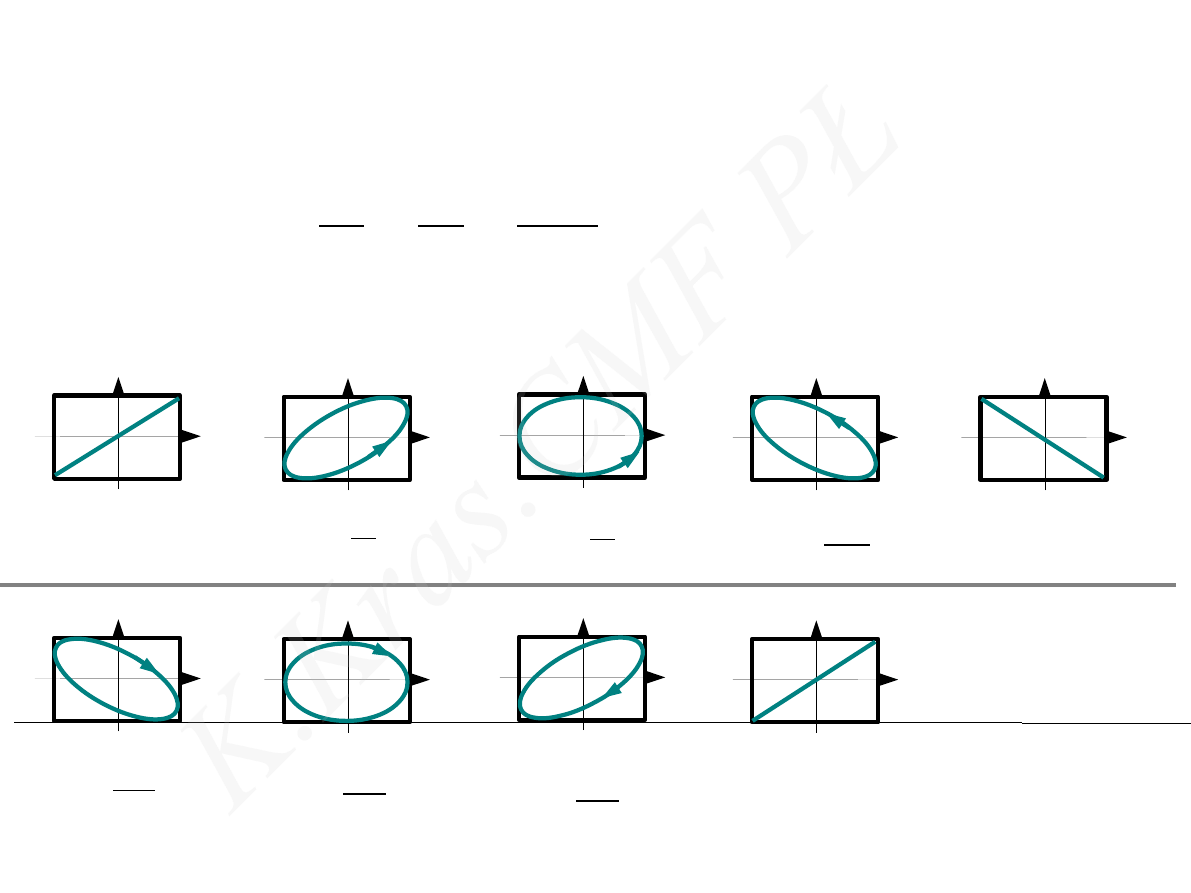
złożenie drgań harmonicznych prostopadłych
równe pulsacje
x
2
A
2
y
2
B
2
−
2 x y
A B
cos = sin
2
y
A
B
x
−
A
−
B
y
A
B
x
−
A
−
B
y
A
B
x
−
A
−
B
y
A
B
x
−
A
−
B
y
A
B
x
−
A
−
B
y
A
B
x
−
A
−
B
y
A
B
x
−
A
−
B
y
A
B
x
−
A
−
B
y
A
B
x
−
A
−
B
=
0
=
4
=
2
=
3
4
=
=
5
4
=
3
2
=
7
4
=
2
⃗
F
s
⃗
F
op
V
m
d
2
x
dt
2
= −
k x −r V
m
d
2
x
dt
2
r
dx
dt
k x = 0
dynamiczne równanie oscylatora harmonicznego z tłumieniem
x
d
2
x
dt
2
r
m
dx
dt
k
m
x = 0
k
m
=
0
2
r
m
=
2
r - współczynnik oporu
β
–
współczynnik tłumienia
k
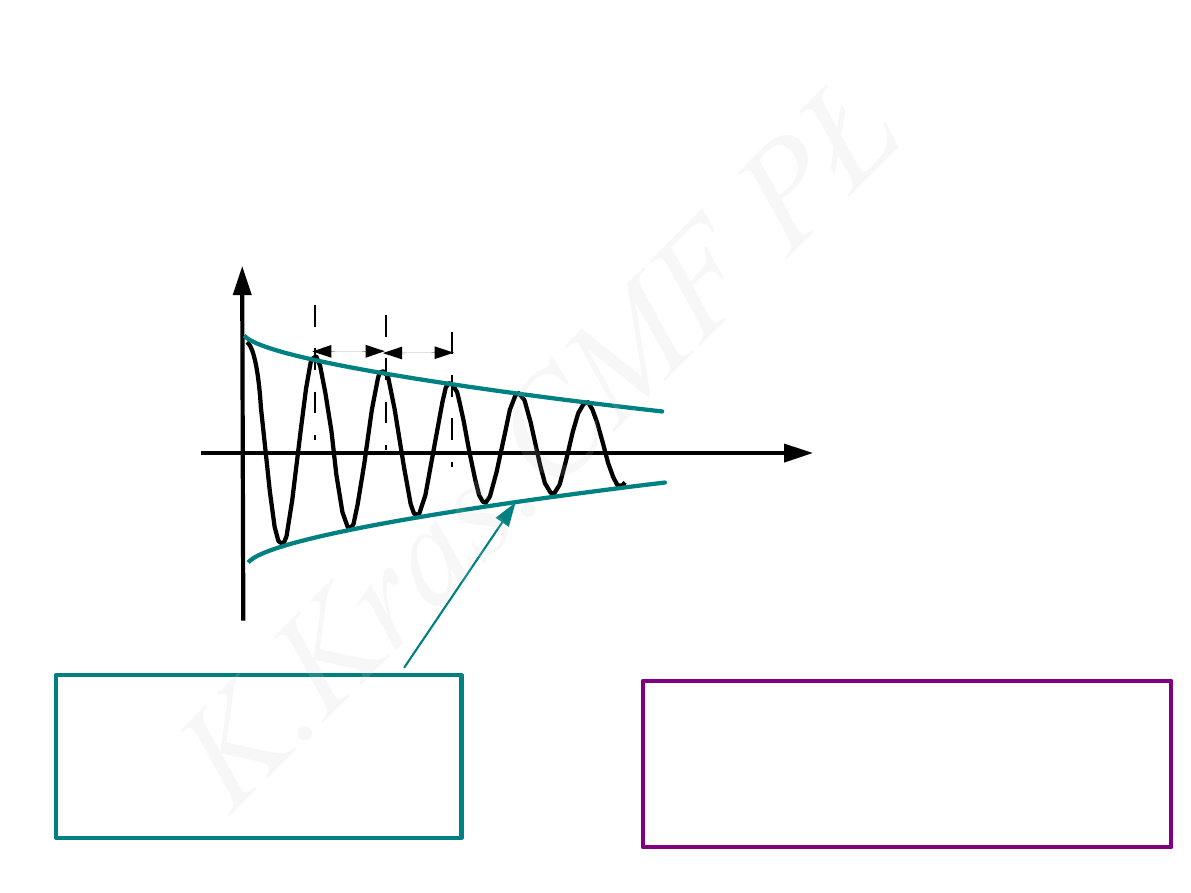
x t = A
0
e
−
t
sin t
2
=
0
2
−
2
0
kinematyczne równanie oscylatora harmonicznego tłumionego
małe tłumienie
At = A
0
e
−
t
amplituda
prędkość kątowa
T
T
A
0
x
t
(małe tłumienie)
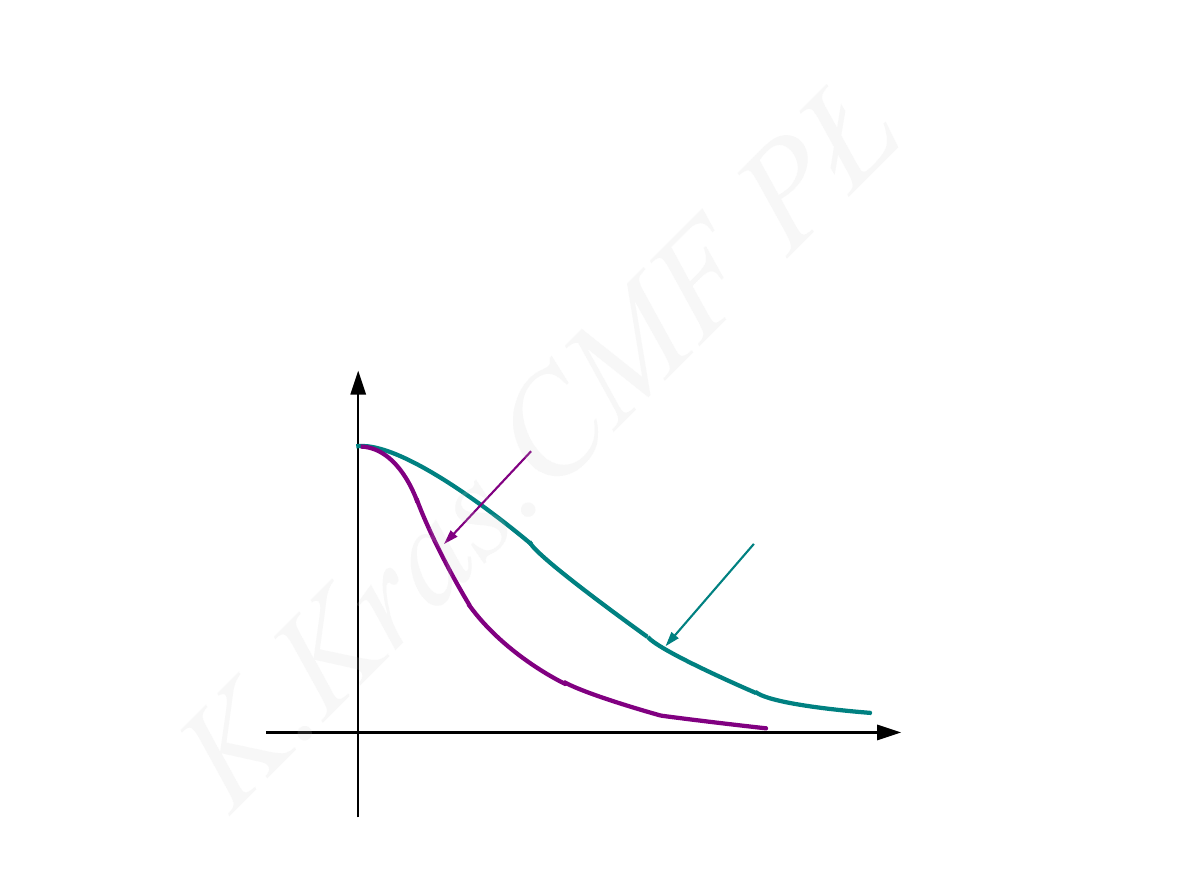
0
2
−
2
=
0
tłumienie krytyczne
tłumienie nadkrytyczne
0
2
−
2
0
nadkrytyczne
krytyczne
x
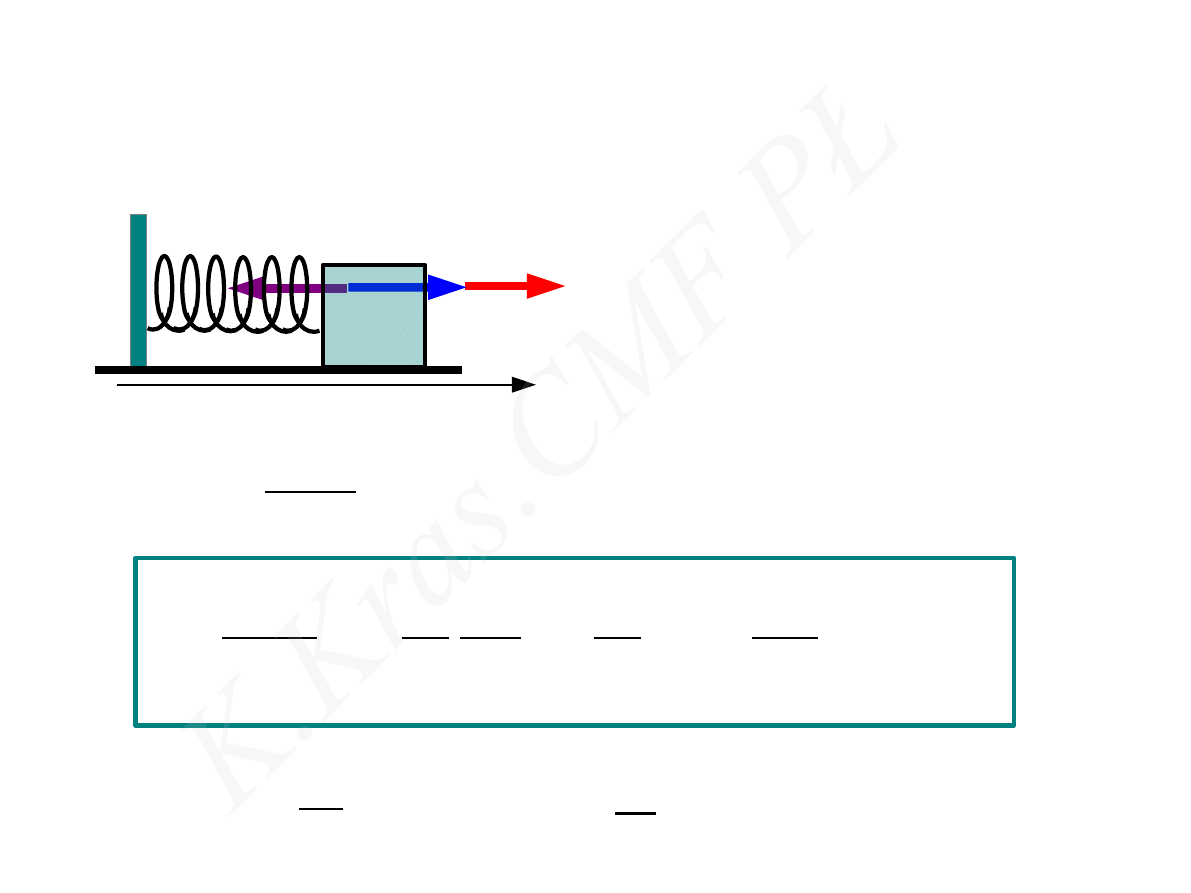
dynamiczne równanie drgań harmonicznych wymuszonych
z tłumieniem
F
s
F
op
siła wymuszająca
F = F
0
cos t
F
m
d
2
x
dt
2
= −
k x −r V F
0
cos t
d
2
x
dt
2
r
m
dx
dt
k
m
x =
F
0
m
cos t
r
m
=
2
k
m
=
0
2
m
k
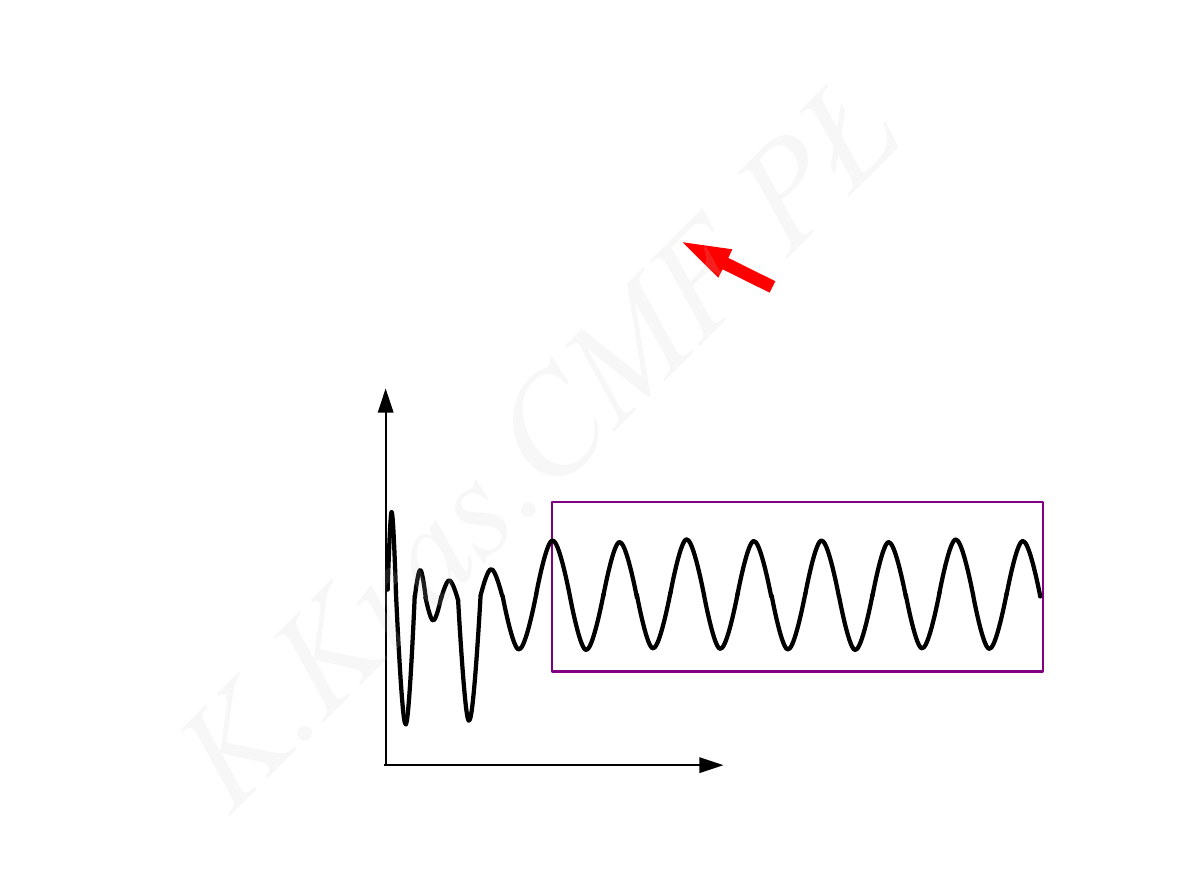
kinematyczne równanie ruchu drgań harmonicznych wymuszonych
z tłumieniem
x t = A cos t−
stan ustalony
!
stan ustalony
x
t
ω
0
=
0
1
0
2
1
r
=
0
2
−
2
2
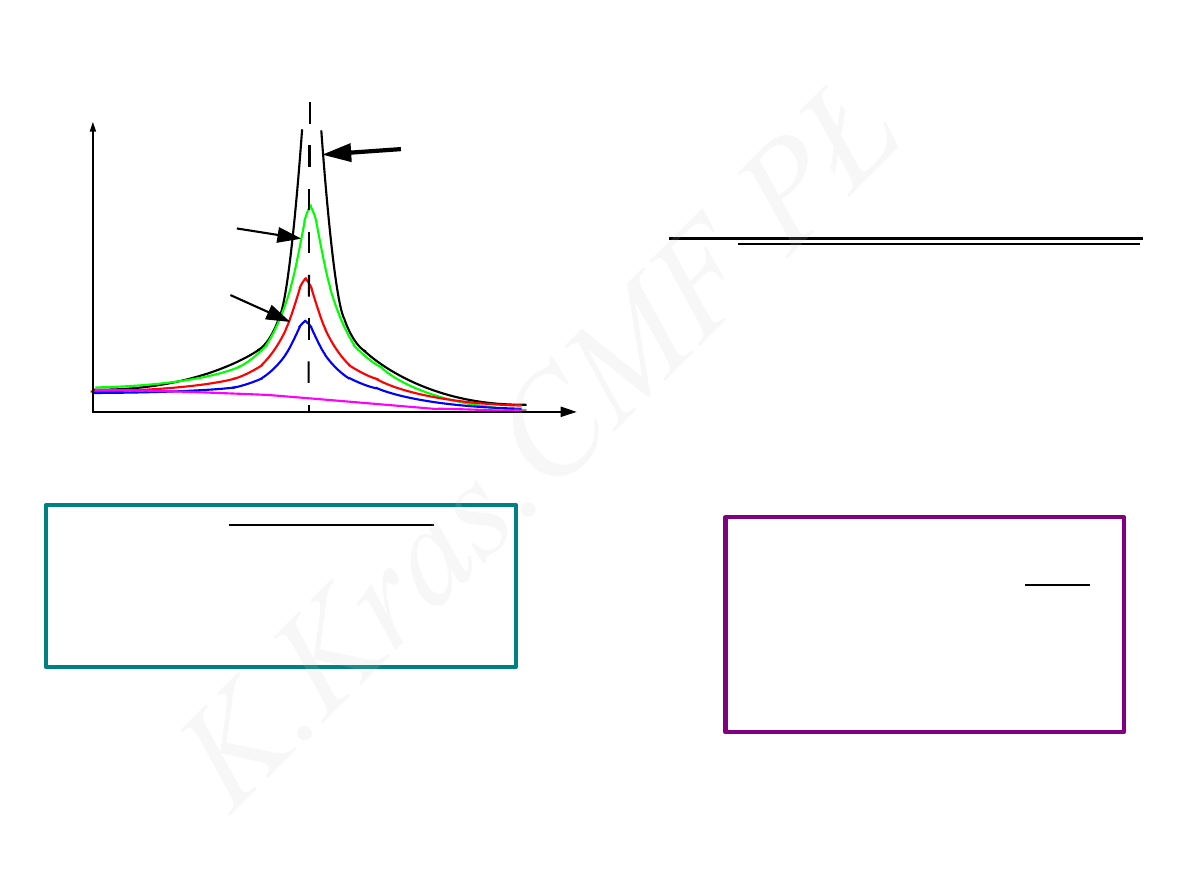
częstość rezonansowa
A
A
st
amplituda drgań harmonicznych wymuszonych tłumionych
=
0⇒
r
=
0
A =
F
0
m
0
2
−
2
2
4
2
2
A
r
=
A
r
=
F
0
r
amplituda w rezonansie
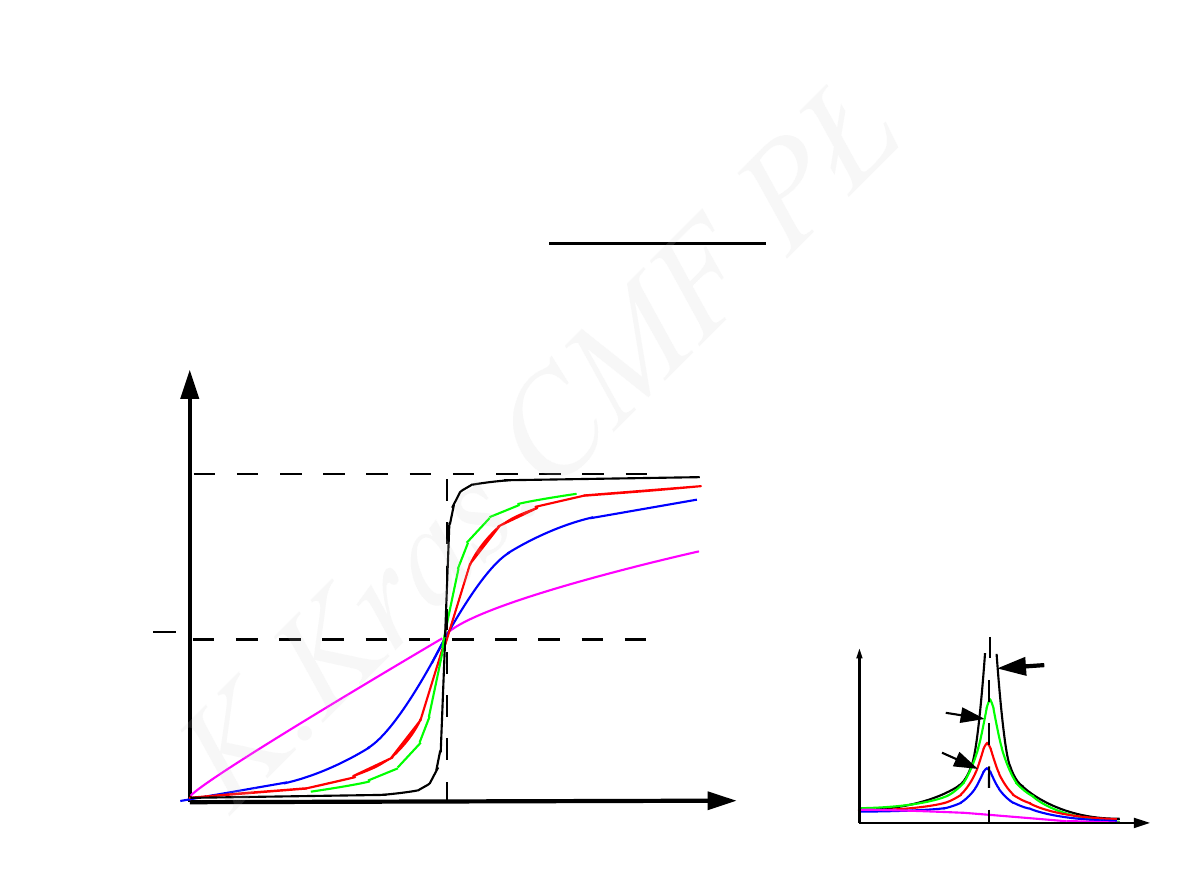
opóźnienie fazowe
siła - wychylenie
tg ϕ =
2βΩ
ω
0
2
−Ω
2
Ω
ϕ
π
2
π
ω
0
ω
0
=
0
1
0
2
1
A
A
st
Document Outline
- Slajd 1
- Slajd 2
- Slajd 3
- Slajd 4
- Slajd 5
- Slajd 6
- Slajd 7
- Slajd 8
- Slajd 9
- Slajd 10
- Slajd 11
- Slajd 12
- Slajd 13
- Slajd 14
- Slajd 15
- Slajd 16
- Slajd 17
- Slajd 18
- Slajd 19
- Slajd 20
- Slajd 21
- Slajd 22
- Slajd 23
- Slajd 24
- Slajd 25
- Slajd 26
- Slajd 27
- Slajd 28
- Slajd 29
- Slajd 30
- Slajd 31
- Slajd 32
Wyszukiwarka
Podobne podstrony:
Materiały do wykładu 7 (17 11 2011)
Materiały do wykładu 6 (04 11 2011)
Materiały do wykładu 5 (03 11 2011)
Materiały do wykładu 4 (27 10 2011)
Materiały do wykładu 4 (28 10 2011)
Materialy do Wykladu 22 11 13 i Nieznany
Materialy do wykladu 5 (02 11 2 Nieznany
Reumatologia - materiał do kolokwium - 19.11.2011, UJK.Fizjoterapia, - Notatki - Rok II -, Fizjotera
VAT w działalności gospodarczej Materialy do wykladu - VAT w dzialalnosci - 2011 rok, dostawy krajow
Materiały do wykładu 3 (20 10 2011)
Materiały do wykładu 3 (21 10 2011)
Materiały do wykładu 2 (13 10 2011)
Materiały do wykładu 4 (27 10 2011)
Materiały do wykładu 4 (28 10 2011)
więcej podobnych podstron