MODELOWANIE I SYMULACJA
Wyprowadzanie równań różniczkowych ruchu prostych układów mechanicznych
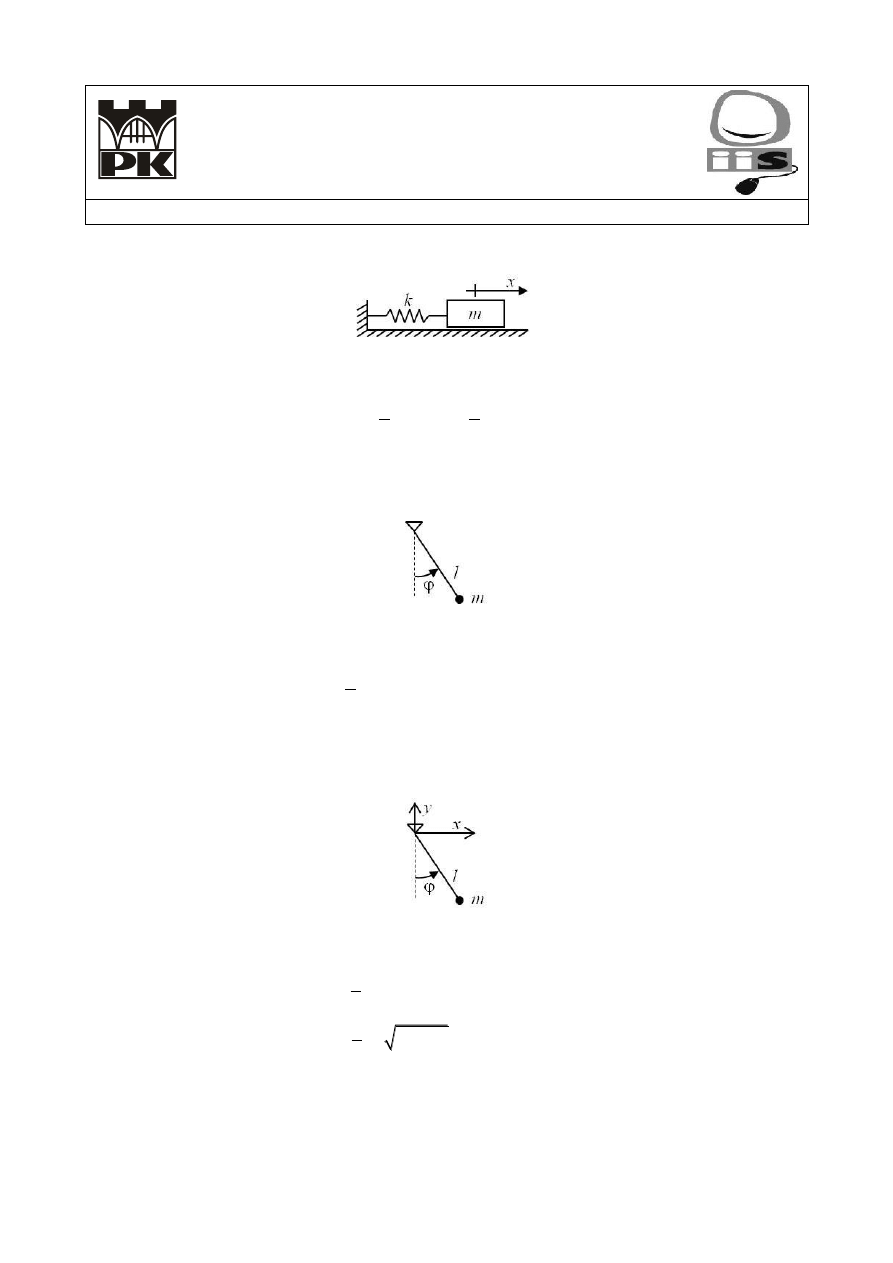
Zadanie 1.
Wyprowadzić równanie różniczkowe opisujące ruch oscylatora harmonicznego wiedząc, że energia
kinetyczna i potencjalna określone są wzorami
2
2
1
1
,
2
2
E
mv
U
kx
gdzie m i k oznaczają odpowiednio masę oscylatora i współczynnik sprężystości.
Rozwiązać otrzymane równanie dla dowolnych warunków początkowych.
Zadanie 2.
Wyprowadzić równanie różniczkowe opisujące ruch wahadła matematycznego wiedząc, że energia
kinetyczna i potencjalna określone są wzorami
2
2
1
,
cos( )
2
E
ml
U
mgl
gdzie m oznacza masę, l – długość wahadła, g – przyspieszenie ziemskie.
Rozwiązać otrzymane równanie dla dowolnych warunków początkowych.
Zadanie 3.
Wyprowadzić równania różniczkowe opisujące ruch wahadła matematycznego zawieszonego na
elastycznej lince wiedząc, że energia kinetyczna i potencjalna określone są wzorami
2
2
2
2
2
1
2
1
2
x
y
E
m v
v
U
k
x
y
l
mgy
gdzie m oznacza masę, l – długość wahadła, g – przyspieszenie ziemskie, k – współczynnik
sprężystości.
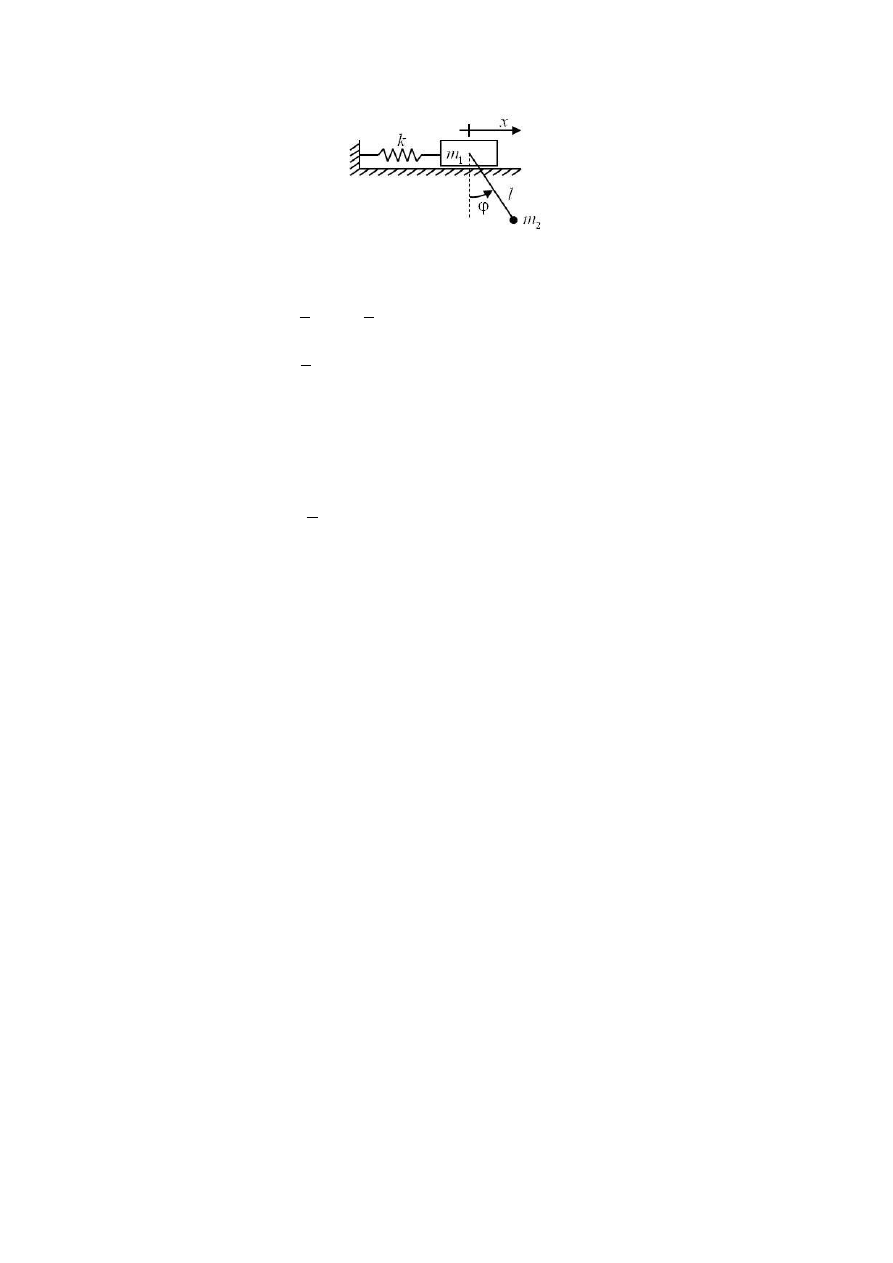
Zadanie 4.
Wyprowadzić równania różniczkowe opisujące ruch wahadła matematycznego podwieszonego na
oscylatorze wiedząc, że energia kinetyczna i potencjalna określone są wzorami
2
2
2
2
1 1
2
1
1 2
2
2
2
1
2
2
1
1
2
cos(
)
2
2
1
cos(
)
2
E
m v
m v
v v l
x
l v
U
kx
m gl
x
gdzie m
1
oznacza masę oscylatora, m
2
– masę wahadła, l – długość wahadła, g – przyspieszenie
ziemskie, k – współczynnik sprężystości sprężyny.
Wyznaczyć rozwiązanie układu równania za pomocą komendy dsolve z opcją numeric
przyjmując następujące dane: m
1
= 1, m
2
= 0.1, g = 9.81, l = 0.1, k = 100 i warunki początkowe:
1
1
2
2
(0)
0.5 , (0)
0,
(0)
,
(0)
0.
3
x
l v
x
v
Dokonać animacji ruchu wahadła korzystając z komend
> X:=t->'rhs(roz(t)[2])';Y:=t->'rhs(roz(t)[4])';
> a1:=animate(pointplot,[[X(t),0],symbol=box,symbolsize=30],
t=0..5,frames=200,color=blue,color=red):
> a2:=animate(pointplot,[[X(t)+l*sin(Y(t)),-l*cos(Y(t))],
symbol=circle,symbolsize=30],t=0..5,frames=200,color=blue,
color=red):
> a3:=animate(plot,[[[X(t),0],
[X(t)+l*sin(Y(t)),-l*cos(Y(t))]]],t=0..5,axes=none,
scaling=constrained,thickness=2,frames=200):
> display(a1,a2,a3);

>
restart:
>
with(plots):
>
lagrange := proc (n, q, r, L) local i, uzm_q, uzm_r, rel_r_q, Lq,
Lr, Lrt; global row; uzm_q := seq(q[i] = q[i](t), i = 1 .. n); uzm_r
:= seq(r[i] = r[i](t), i = 1 .. n); for i to n do Lq[i] := subs([uzm_q,
uzm_r], diff(L, q[i])); Lr[i] := subs([uzm_q, uzm_r], diff(L, r[i]))
end do; for i to n do Lrt[i] := diff(Lr[i], t) end do; rel_r_q :=
seq(r[i](t) = diff(q[i](t), t), i = 1 .. n); for i to n do row[i] :=
subs(rel_r_q, Lrt[i]-Lq[i] = 0) end do; seq(row[i], i = 1 .. n) end
proc:
>
>
#Zad1
>
E := (1/2)*m*v[1]^2:
>
U := (1/2)*k*x^2:
>
L := E-U:
>
lagrange(1, x, v, L):
>
>
#Zad2
>
restart:
>
E := (1/2)*m*l^2*omega[1]^2:
>
U := -m*g*l*cos(phi[1]):
>
L := E-U:
>
lagrange(1, phi, omega, L):
>
>
#Zad3
>
restart:
>
E := (1/2)*m*(v[1]^2+v[2]^2):
>
U := (1/2)*k*(sqrt(x[1]^2+x[2]^2)-l)^2+m*g*x[2]:
>
L := E-U:
>
lagrange(2, v, x, L):
>
>
#Zad4
>
restart:
>
E :=
(1/2)*m[1]*v[1]^2+(1/2)*m[2]*(v[1]^2+2*v[1]*v[2]*l*cos(x[2])+l^2*
v[2]^2):
>
U := (1/2)*k*x[1]^2-m[2]*g*l*cos(x[2]):
>
m[1] := 1: m[2] := .1: g := 9.81: l := .1: k := 100:
>
wp := x[1](0) = .5*l, (D(x[1]))(0) = 0, x[2](0) = (1/3)*Pi,
(D(x[2]))(0) = 0:
>
L := E-U:
>
lagrange(2, x, v, L):
>
dsolve({wp, row[1], row[2]}, {x[1](t), x[2](t)}, numeric):
MODELOWANIE I SYMULACJA
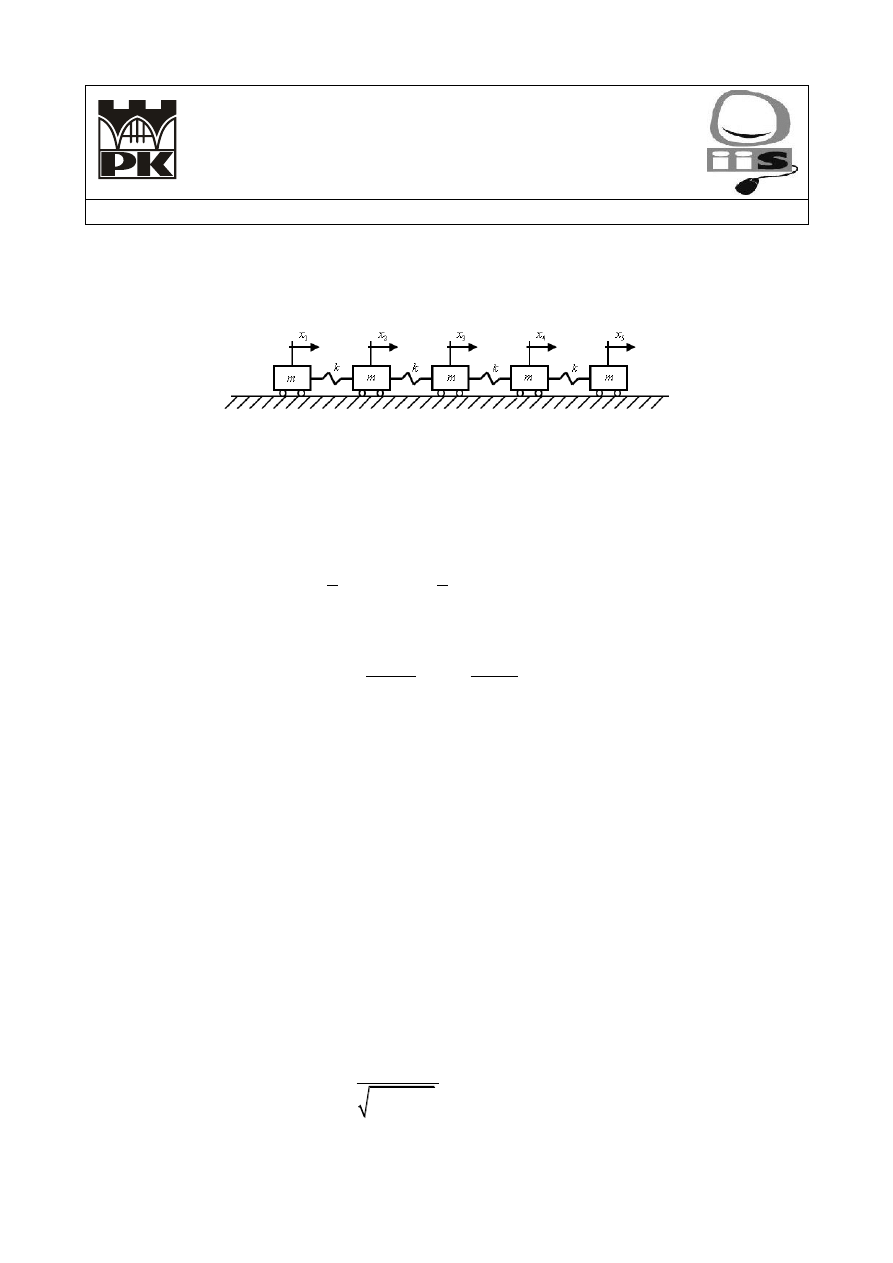
Modelowanie liniowego układu dyskretnego
Wyznaczyć rozwiązanie analityczne opisujące ruch liniowego układu dyskretnego przedstawionego
na rysunku
gdzie m oznacza masę poszczególnych ciał, k – sztywność każdej sprężyny, a x
i
, i = 1, 2, ...,5 –
przemieszczenia środków poszczególnych mas.
Kolejność postępowania:
1. Wyznaczyć energię kinetyczną i potencjalną układu wykorzystując zależności:
5
4
2
2
1
1
1
1
1
,
(
)
2
2
i
i
i
i
i
E
m
v
U
k
x
x
2. Wyznaczyć macierz sztywności K i bezwładności M korzystając ze wzorów:
2
2
,
ij
ij
i
j
i
j
U
E
k
m
x x
v v
Uwaga: należy zadeklarować najpierw obie macierze, by następnie wyznaczyć ich elementy
w podwójne pętli
3. Wyznaczyć macierz A związaną z macierzami K i M wzorem
1
A
M K
4. Przyjąć dane liczbowe: m = 1, k = 100 i wyznaczyć wartości i wektory własne macierzy A
korzystając z komendy Eigenvectors w postaci
> alpha,V:=Eigenvectors(A):
5. Korzystając z procedury sortowanie posortować wartości własne zmieniając
równocześnie w odpowiedni sposób pozycje kolumn w macierzy V, zawierającej wektory
własne macierzy A
> alpha,V:=sortowanie(alpha,V);
6. Dokonać normalizacji wektorów własnych względem macierzy bezwładności korzystając ze
wzoru (u
i
– kolumny macierzy V)
,
1, 2,...,
i
i
T
i
i
i
n
u
w
u Mu

7. Wyznaczyć częstości drgań swobodnych korzystając z komendy map ze wzoru
,
1, 2,...,
i
i
i
n
gdzie
i
oznaczają posegregowane wartości własne.
8. Zadać warunki początkowe w formie wektora przemieszczeń początkowych x0
zawierającego zerowe elementy i wektora prędkości początkowych v0 zawierającego
niezerową pierwszą współrzędną równą 10
> x0:=Vector(5,[0,0,0,0,0]); v0:=Vector(5,[10,0,0,0,0]);
9. Wyznaczyć analityczne rozwiązanie opisujące ruch poszczególnych mas korzystając ze
wzoru
5
1
1
2
0
. .( 0
0 )
. .
0 cos (
)
sin (
)
T
T
i
i
i
i
i
i
t
t
t
v
x
w M x
v
w
w M x
w
10. Sporządzić wykres przemieszeń i prędkości poszczególnych mas korzystając z poniższych
komend:
> plot([seq(x[i],i=1..n)],t=0..3);
> v:=map(diff,x,t):
> plot([seq(v[i],i=1..n)],t=0..3);
11. Dokonać animacji ruchu poszczególnych mas korzystając z poniższych komend:
> seq_pkt:=seq([(j-1)*3+'x'[j],0],j=1..n);
> animate(pointplot,[[seq_pkt],symbol=box,symbolsize=50],
t=0..3,frames=100,color=red,axes=none);
12. Sporządzić wykres czasowy energii mechanicznej (E + U)
> plot(E+U,t=0..5,0..100);
13. Która ze sprężyn będzie najbardziej ściśnięta/rozciągnięta w trakcie pierwszych trzech
sekund?

>
restart:
>
with(LinearAlgebra):
with(plots):
>
#sortowanie proc
>
>
#Zad1
>
E:=1/2*m*add(v[i]^2,i=1..5):
>
U:=1/2*k*add((x[i+1]-x[i])^2,i=1..4):
>
>
#Zad2
>
n:=5:
>
K:=Matrix(n):
>
M:=Matrix(n):
>
for i to n do
for j to n do
K[i,j]:=diff(U,x[i],x[j]);
M[i,j]:=diff(E,v[i],v[j]);
end do;
end do;
>
K:
>
M:
>
>
#Zad3
>
A:=1/M.K:
>
>
#Zad4
>
m:=1: k:=100:
>
alpha,V:=evalf(Eigenvectors(A)):
>
>
#Zad5
>
alpha,V:=sortowanie(alpha,V):
>
>
#Zad6
>
for i from 1 to n do
w[i]:=V[1..n,i]/(sqrt((V[1..n,i]^%T).M.V[1..n,i])):
end do:
>
>
#Zad7
>
for i from 1 to n do
omega[i]:=sqrt(alpha[i])
end do:
>
>
#Zad8
>
x0:=Vector(5,[0,0,0,0,0]):
>
v0:=Vector(5,[10,0,0,0,0]):
>
>
#Zad9
>
x:=(Transpose(w[1]).M.(x0+v0*t))*w[1]+add((Transpose(w[1]).M.(x0*cos(om
ega[i]*t)+v0*sin(omega[i]*t)/omega[i]))*w[i], i=2..5):
Wyszukiwarka
Podobne podstrony:
PO lab 5 id 364195 Nieznany
lab [5] id 258102 Nieznany
lab [1] id 258099 Nieznany
chemia fizyczna lab id 112228 Nieznany
Lab 4 id 257946 Nieznany
Lab 1 id 257555 Nieznany
fcs lab 5 id 169065 Nieznany
Bsi 08 lab id 93519 Nieznany
lab(2) id 258733 Nieznany
lab 3 2 id 259509 Nieznany
lab [3] id 258100 Nieznany
LAB 9 id 258268 Nieznany
Arduino Lab 1 id 68202 Nieznany
Pr 1st 1 1 m01 lab id 382178 Nieznany
Lab 8 id 258226 Nieznany
Lab 3 3 id 259511 Nieznany
IO lab 2 id 219711 Nieznany
P 2013 lab P id 797792 Nieznany
cw lab 1 id 122230 Nieznany
więcej podobnych podstron