1
1
L.Morawski
Podstawowe człony
dynamiczne cz.1
Człony pierwszego rzędu
2
L.Morawski
Człony pierwszego rzędu są to takie człony,
które opisane są równaniami różniczkowymi
pierwszego rzędu lub co jest temu
równoważne, opisane transmitancją, której
wielomian mianownika jest pierwszego rzędu
2
L.Morawski
3
Podstawowe człony dynamiczne
Człony pierwszego rzędu
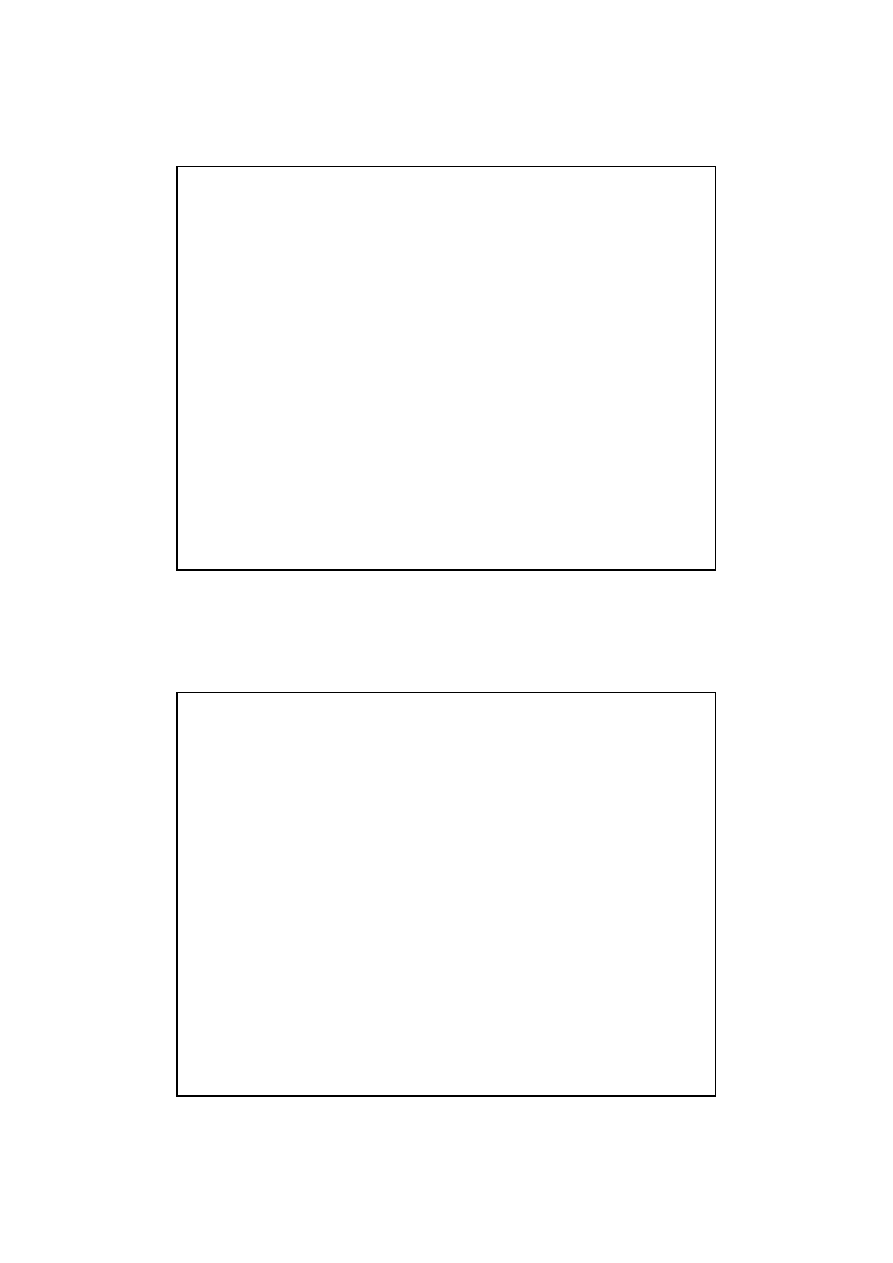
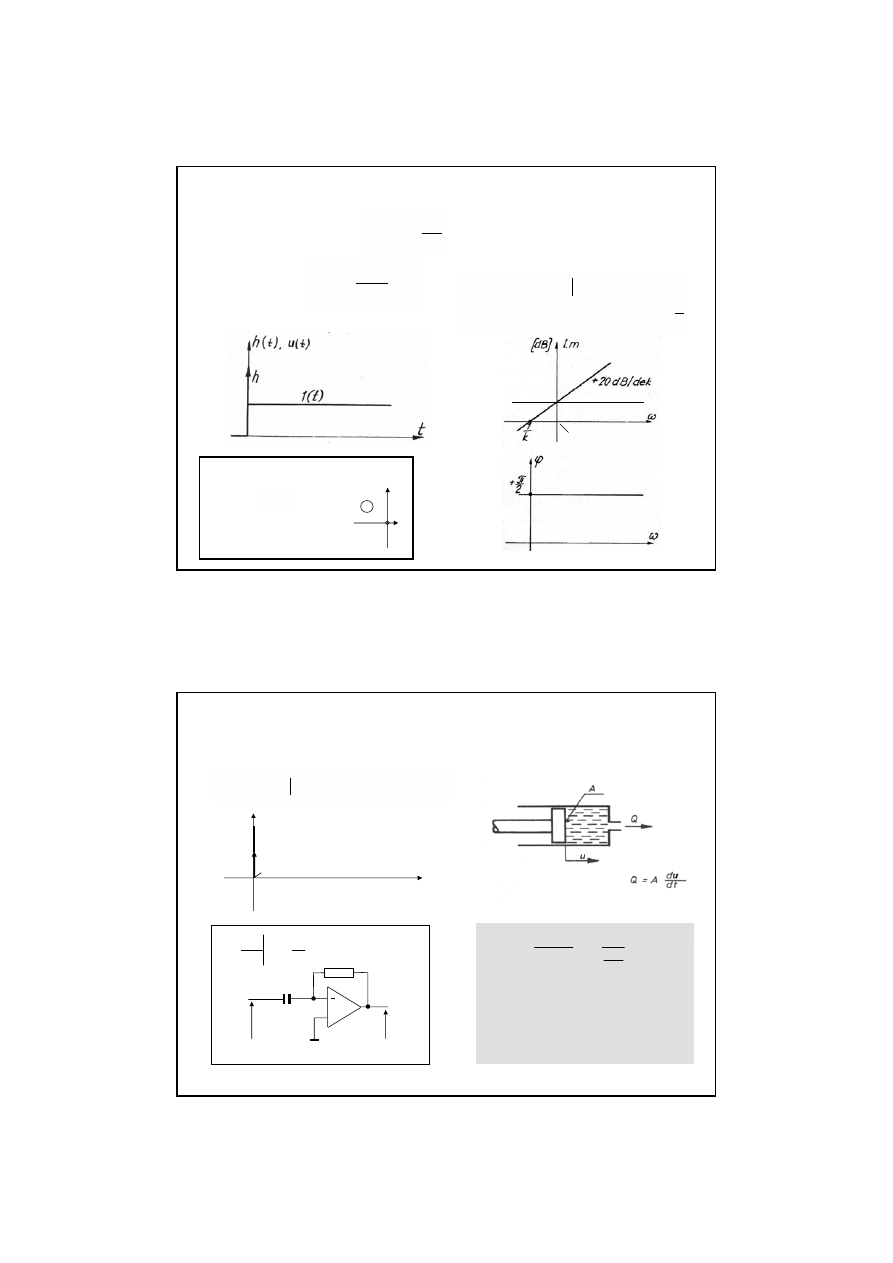
Człon proporcjonalny (zerowego rzędu)
U(s)
Y(s)
G(s)
k
U(s)
Y(s)
G(s)
U(s)
k
Y(s)
)
t
(
u
k
)
t
(
y
=
=
⇒
⋅
=
⇒
⋅
=
u(t)
y(t)
t
y(t)
u(t)
y(t), u(t)
Odpowiedź jednostkowa
20log|G(j
ω)|
log
ω
log
ω
20logk
ϕ(ω)
Charakterystyki logarytmiczne
L.Morawski
4
Podstawowe człony dynamiczne
Człony pierwszego rzędu
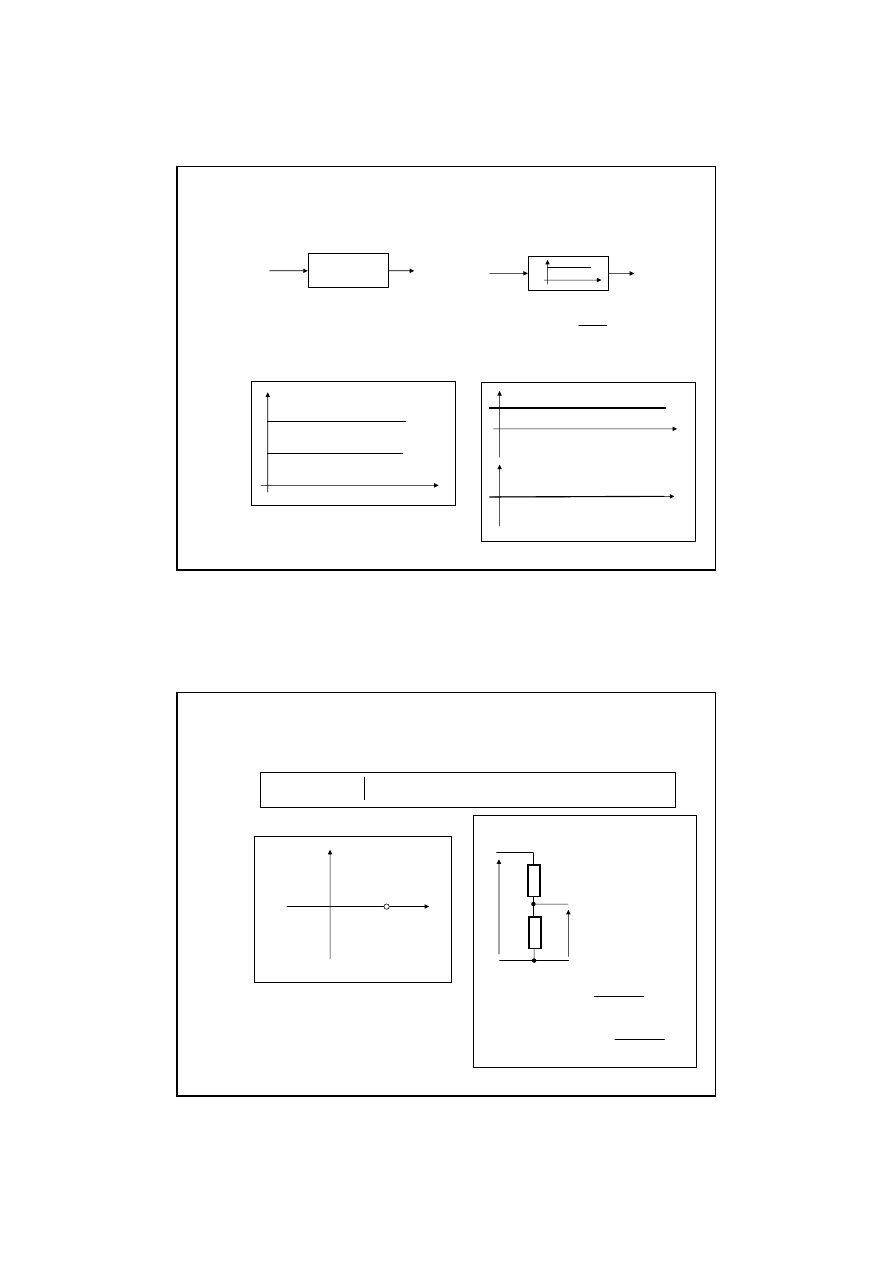
Człon proporcjonalny
k
)
(
P
k
)
(
jQ
)
(
P
)
s
(
G
)
j
(
G
j
s
=
⇒
=
+
=
=
=
ω
ω
ω
ω
ω
Q
P
k
Charakterystyka amplitudowo-fazowa
Przykład:
R
1
R
2
u
1
(t)
u
2
(t)
2
1
1
2
2
1
1
1
R
R
R
k
G(s)
)
t
(
u
R
R
R
)
t
(
u
+
=
=
+
=
3
L.Morawski
5
Podstawowe człony dynamiczne
Człony pierwszego rzędu
Człon proporcjonalny
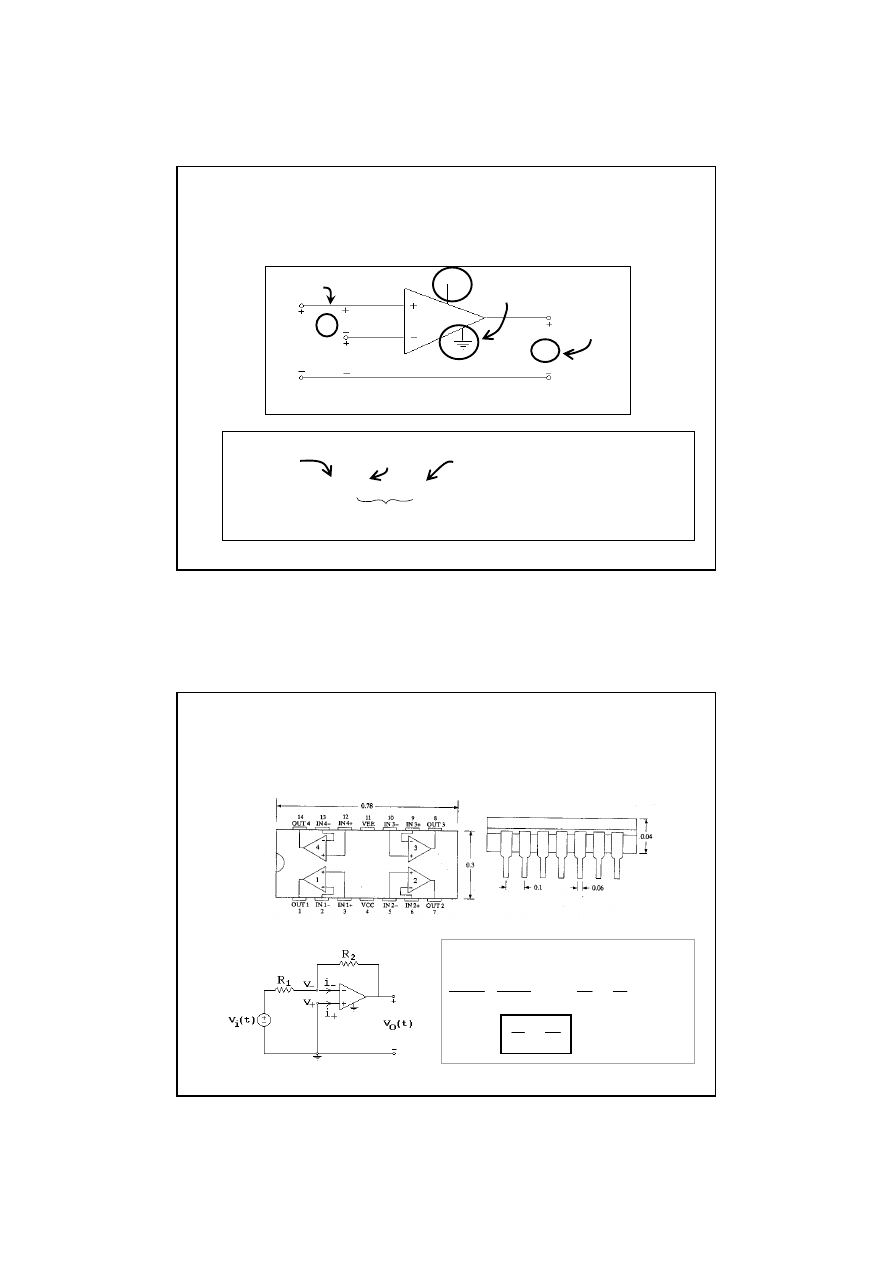
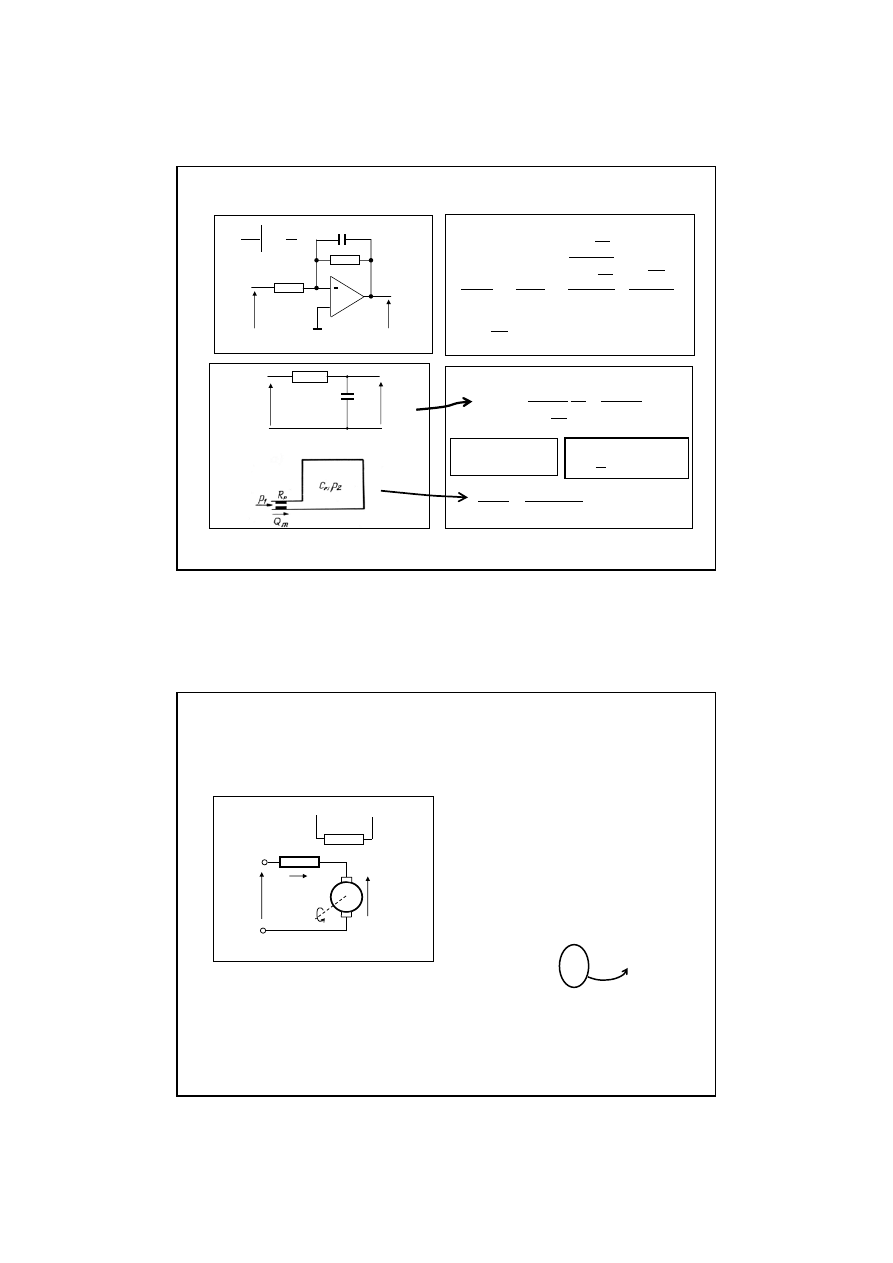
Przykład członu proporcjonalnego ze elektronicznym wzmacniaczem operacyjnym
+
v
−
v
i
v
o
v
Napięcie
wyjściowe
Zasilanie
Napięcia
wejściowe
V
cc
R
i
R
0
Napięcia mierzone są względem masy,
R
i,
R
o
rezystancja wejściowa i wyjściowa wzmacniacza
)
(
A
o
o
−
+
ν
−
ν
=
ν
i
v
=
Wzmocnienie
wzmacniacza
operacyjnego
wejście
nieodwracające
wejście
odwracające
1
10
10
A
6
4
o
>>
÷
=
i
o
R
R
>>
L.Morawski
6
Podstawowe człony dynamiczne
Człony pierwszego rzędu
Człon proporcjonalny
Przykład członu proporcjonalnego ze elektronicznym wzmacniaczem operacyjnym
1
2
i
o
1
i
2
o
1
i
2
o
0
o
R
R
v
v
R
v
R
v
R
v
v
R
v
v
0
i
,
i
0,
v
,
0
v
)
v
0
(
A
v
−
=
−
=
⇒
−
=
−
≈
=
≈
⇒
−
=
−
−
+
−
+
−
−
4
L.Morawski
7
Podstawowe człony dynamiczne
Człony pierwszego rzędu
Człon proporcjonalny
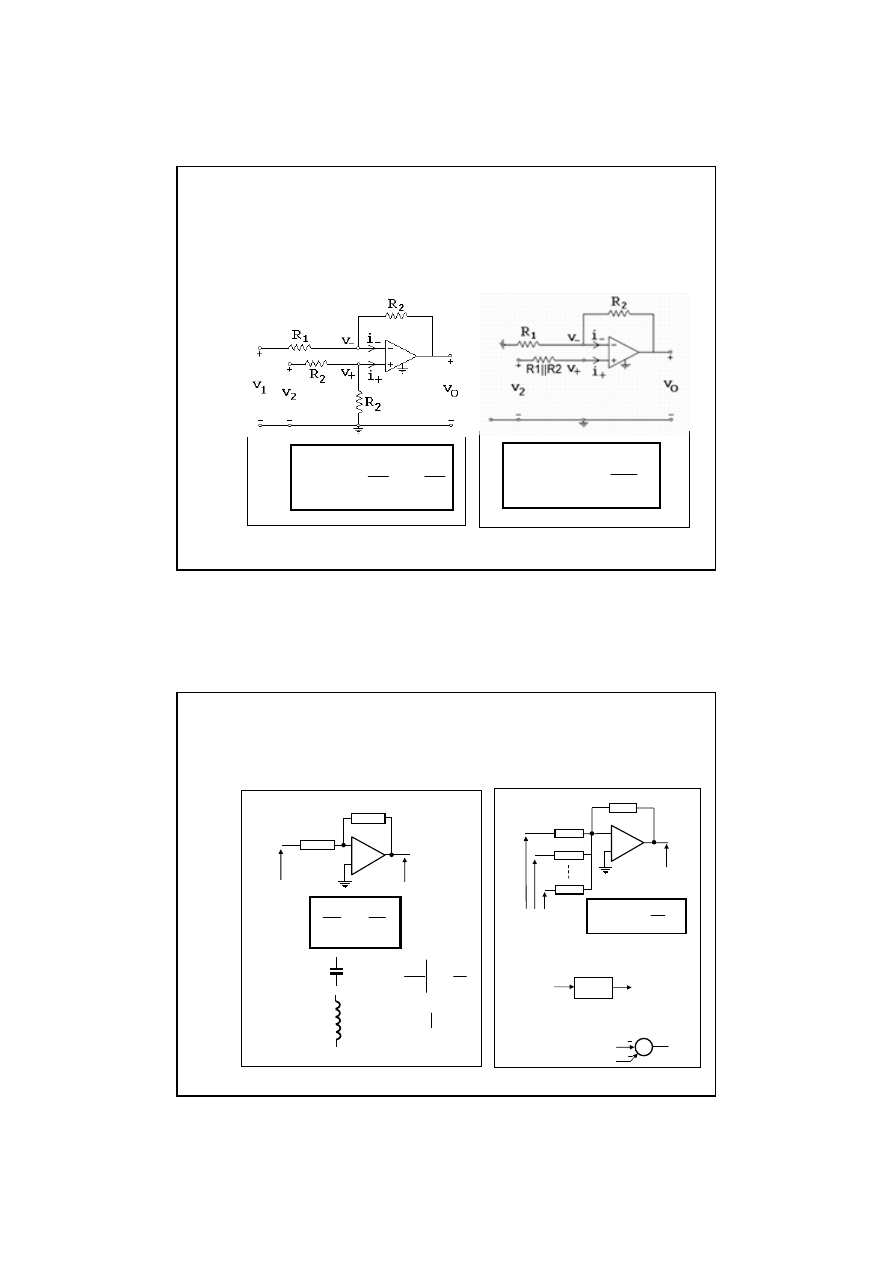
Przykład członu proporcjonalnego ze elektronicznym wzmacniaczem operacyjnym
1
2
1
1
2
2
0
R
R
v
)
R
R
1
(
v
v
−
+
=
⇒
)
R
R
1
(
v
v
1
2
2
0
+
=
L.Morawski
8
Podstawowe człony dynamiczne
Człony pierwszego rzędu
Człon proporcjonalny
Przykład członu proporcjonalnego ze elektronicznym wzmacniaczem operacyjnym
_
+
z
1
z
2
v
i
v
o
1
2
i
o
z
z
v
v
−
=
kondensator
C
L
indukcyjność
sC
1
jω
1
z
s
jω
=
=
⇒
=
C
sL
jω
z
s
jω
=
=
⇒
=
L
R
z
_
+
R
1
v
1
v
o
R
2
R
n
v
2
v
n
∑
=
−
=
n
1
i
i
i
z
o
v
R
1
R
v
1
o
z
1
v
v
R
R
R
1
n
−
=
⇒
=
=
=
Inwerter (blok zmieniający znak sygn.)
v
1
v
o
-1
Sumator
)
v
v
(
v
R
R
R
R
2
n
.
np
2
1
o
2
1
z
+
−
=
=
=
=
=
v
1
v
2
v
o
5
L.Morawski
9
Podstawowe człony dynamiczne
Człony pierwszego rzędu
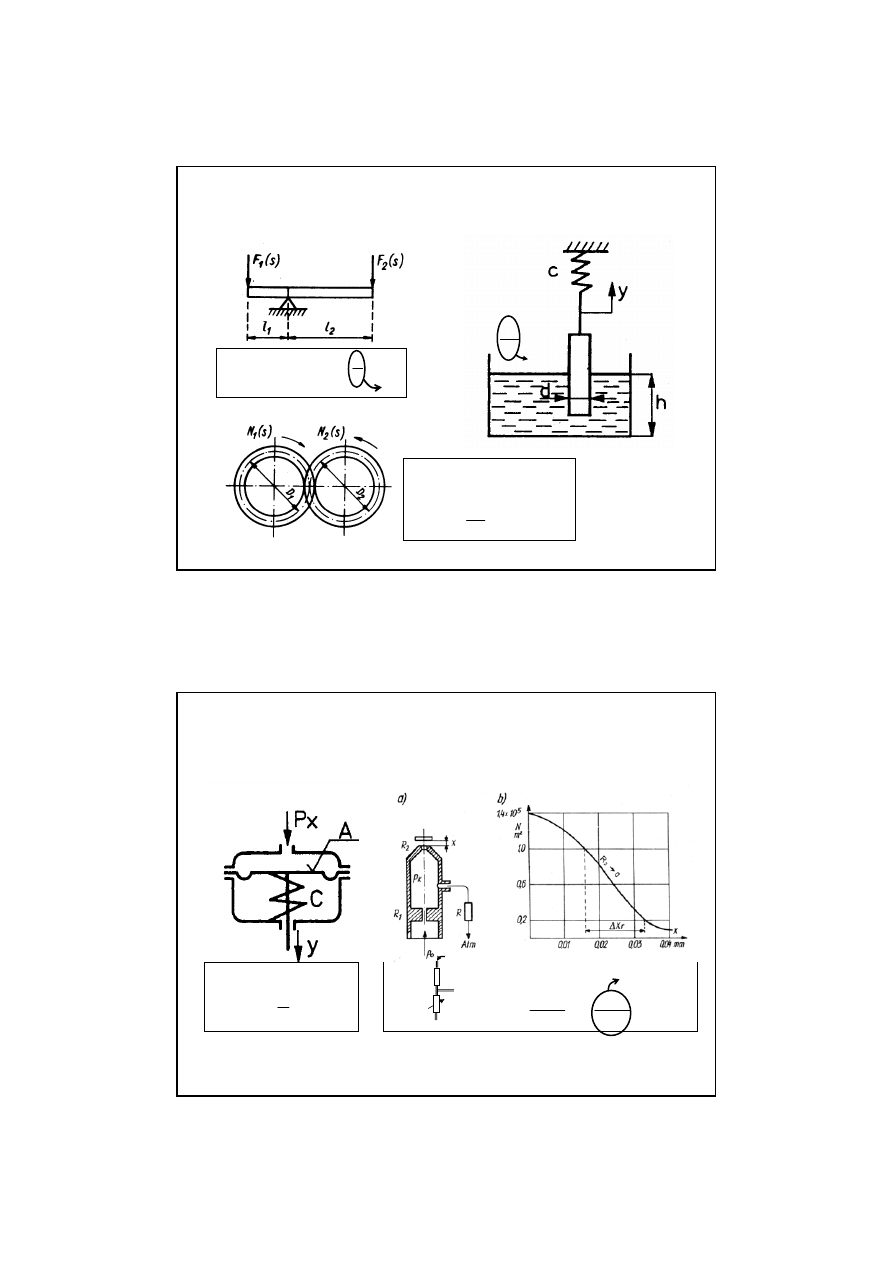
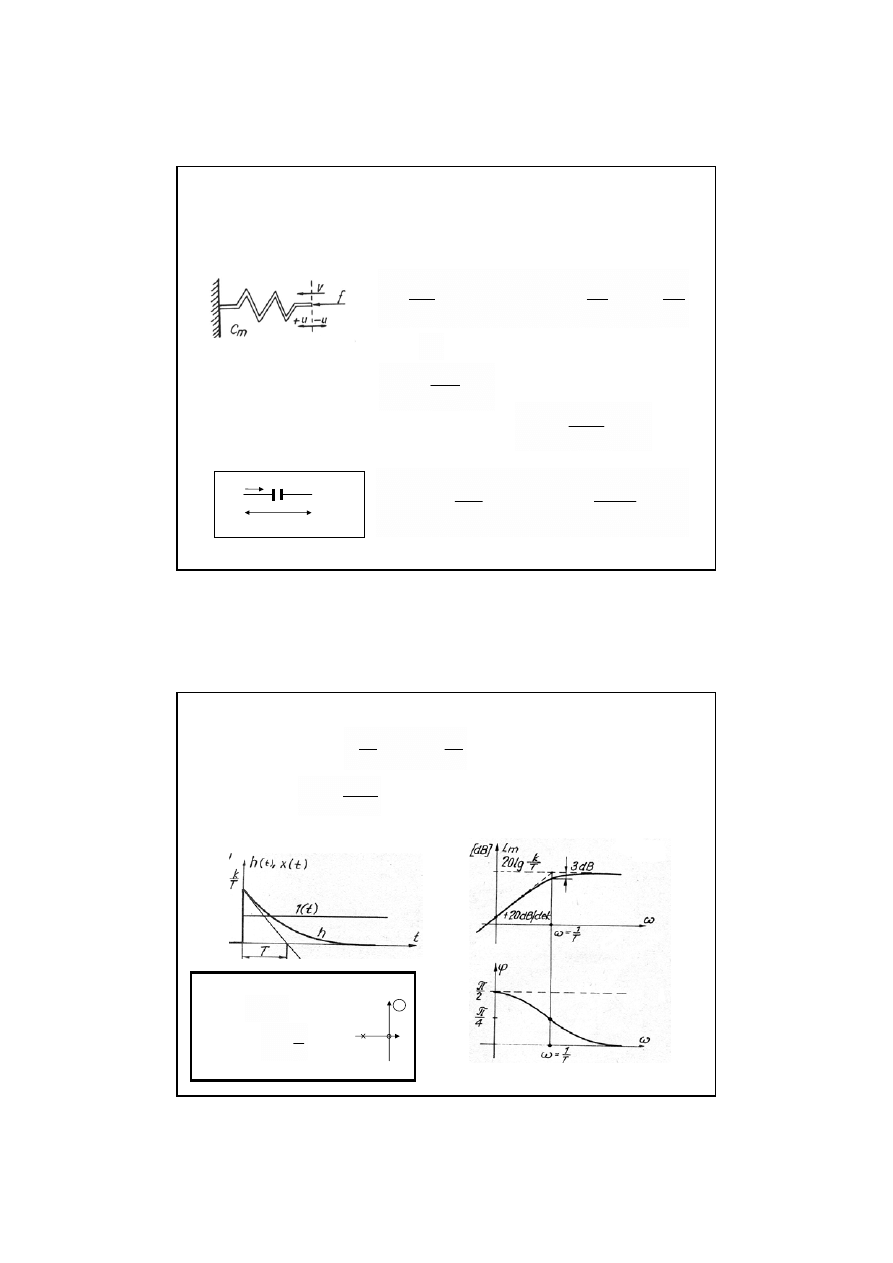
Człony proporcjonalne mechaniczne
)
s
(
F
l
l
)
s
(
F
l
F
l
F
2
1
2
1
2
2
1
1
⋅
=
⇒
⋅
=
⋅
k
)
s
(
N
D
D
)
s
(
N
D
)
s
(
N
D
)
s
(
N
1
2
1
2
2
2
1
1
⋅
=
⋅
=
⋅
Przekładnia zębata
0
2
0
2
k
)
s
(
H
c
d
Y(s)
)
h
h
(
d
y
c
+
⋅
π
=
⇓
−
π
=
⋅
k
L.Morawski
10
Podstawowe człony dynamiczne
Człony pierwszego rzędu
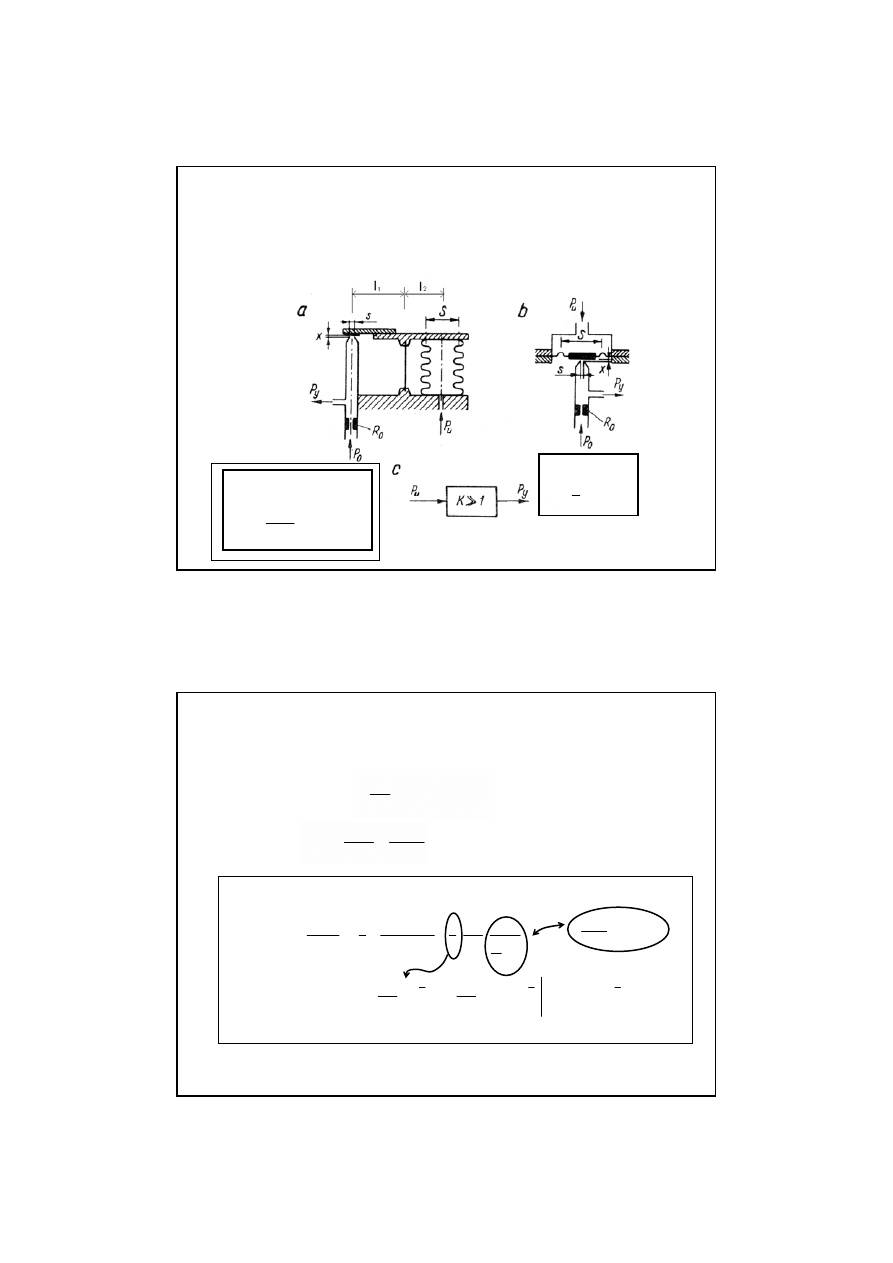
Człony proporcjonalne mechaniczne
)
s
(
P
c
A
)
s
(
Y
)
s
(
P
A
)
s
(
Y
c
x
x
⋅
=
⋅
=
⋅
Siłownik
Kaskada pneumatyczna
R
2
≡x
R
1
Atm p=0
p
k
-
ciśnienie wyjściowe
p
0
-
ciśnienie powietrza zasilania
)
x
x
(
R
R
k
p
R
R
R
p
p
0
2
1
x
0
2
2
1
0
k
−
+
⋅
=
⋅
+
=
k≈20−40 N/mm
3
6
11
L.Morawski
Podstawowe człony dynamiczne
Człony pierwszego rzędu
Człony proporcjonalne mechaniczne
u
u
1
2
y
2
u
1
y
p
k
p
l
s
l
S
p
l
S
p
l
s
p
⋅
=
⋅
⋅
⋅
=
⋅
⋅
=
⋅
⋅
u
u
y
u
y
p
k
p
s
S
p
S
p
s
p
⋅
=
⋅
=
⋅
=
⋅
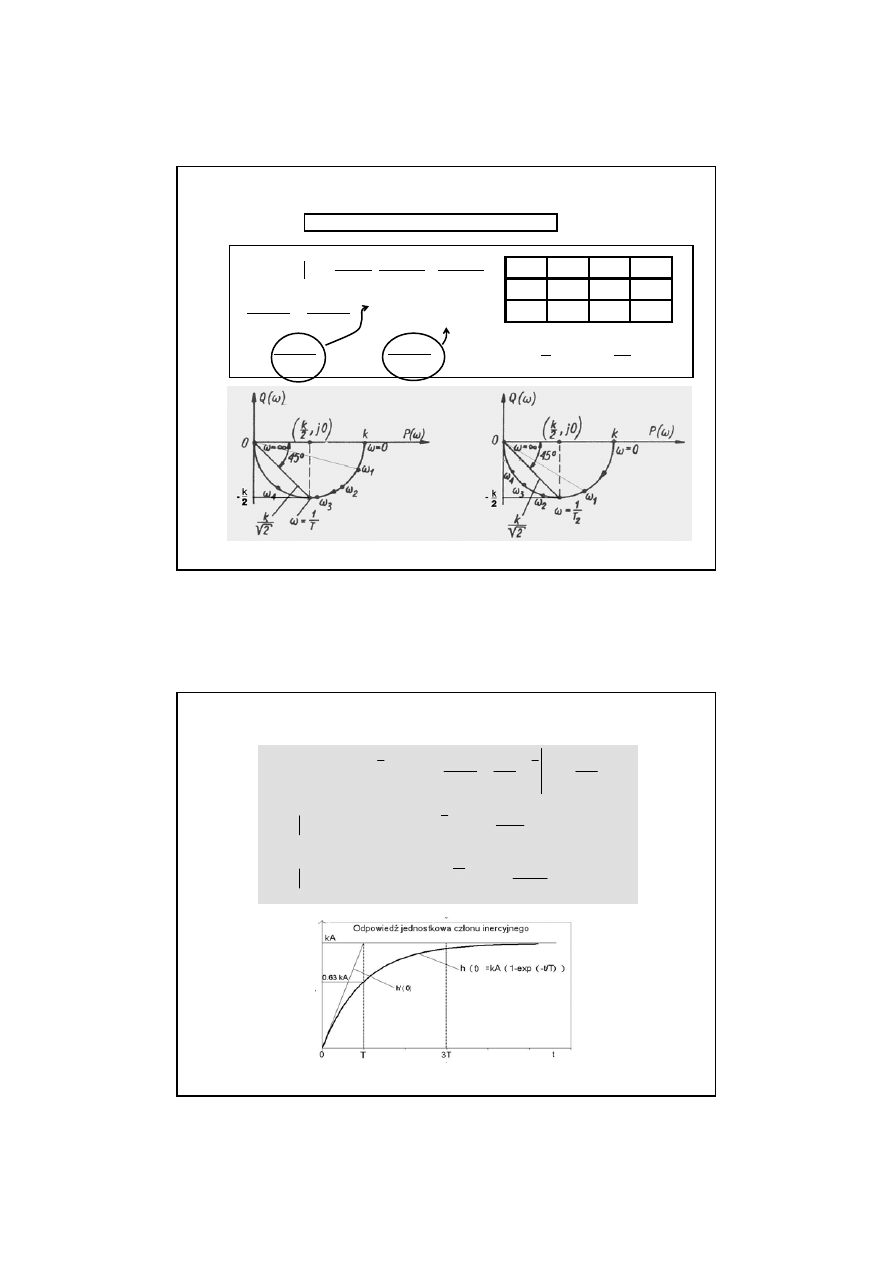
Wzmacniacze ciśnienia powietrza w wykonaniu:
a) na równoważni pneumatycznej, b) membranowym
12
L.Morawski
Podstawowe człony dynamiczne
Człony pierwszego rzędu
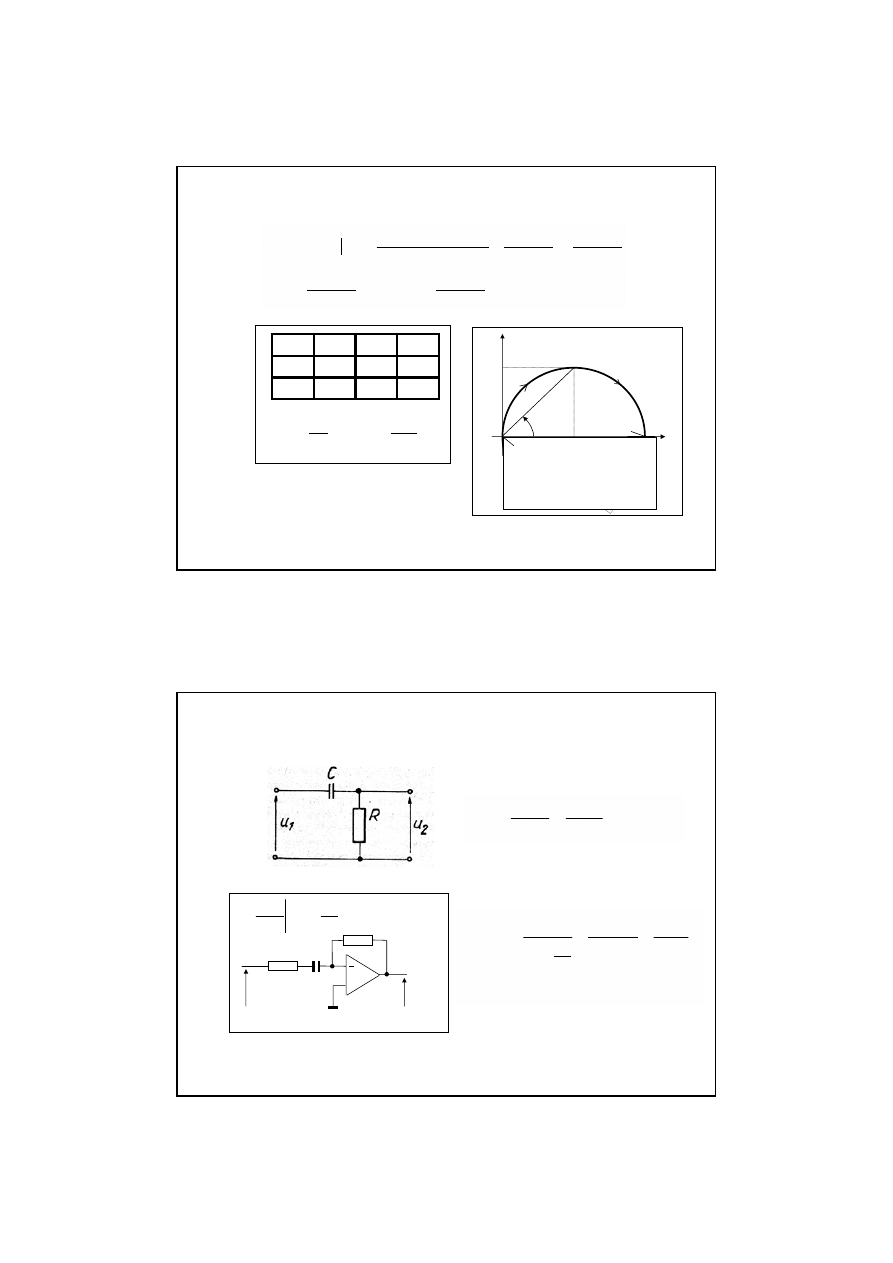
Człony inercyjne
Transmitancja
k - współczynnik wzmocnienia
T – stała czasowa
sT
1
k
)
s
(
U
)
s
(
Y
)
s
(
G
+
=
=
Równanie różniczkowe
)
t
(
ku
)
t
(
y
dt
dy
T
=
+
Przykład: Wyznaczyć odpowiedź na skok jednostkowy członu inercyjnego
( )
−
=
⋅
−
⋅
=
τ
=
=
⇒
+
⋅
⋅
=
+
⋅
=
⋅
+
=
−
τ
−
τ
−
∫
t
T
1
t
0
T
1
t
0
T
1
e
1
kA
e
T
T
kA
d
e
T
kA
)
t
(
h
y(t)
s
T
1
1
T
kA
s
1
)
sT
1
(
s
kA
s
1
A
sT
1
k
)
s
(
H
całkowanie w dziedzinie czasu
at
e
a
s
1
−
⇔
+
7
13
L.Morawski
2
2
2
2
2
2
2
2
2
2
j
s
T
1
kT
)
(
Q
T
1
k
)
(
P
T
1
kT
j
T
1
k
T
1
jkT
k
)
T
j
1
(
)
T
j
1
(
T
j
1
k
)
s
(
G
)
j
(
G
ω
+
ω
−
=
ω
ω
+
=
ω
ω
+
ω
−
ω
+
=
ω
+
ω
−
=
ω
−
ω
−
⋅
ω
+
=
=
ω
ω
=
funkcja parzysta (
ω)
funkcja nieparzysta
4
k
Q
2
k
P
2
2
2
=
+
−
Człony inercyjne
Charakterystyki amplitudowo-fazowe
0
-k/2
0
Q(
ω)
0
k/2
K
P(
ω)
∞
1/T
0
ω
14
L.Morawski
Człony inercyjne
kA
95
.
0
e
1
e
kA
e
1
kA
)
T
3
(
h
h(t)
kA
63
.
0
e
1
e
kA
e
1
kA
)
T
(
h
h(t)
T
kA
e
T
kA
dt
dh(t)
e
1
kA
)
t
(
h
3
3
T
T
3
T
3
t
T
T
T
t
0
t
T
t
T
t
⋅
≈
−
=
−
=
=
⋅
≈
−
=
−
=
=
=
=
⇒
−
=
−
=
−
=
=
−
−
8
15
L.Morawski
Człony inercyjne
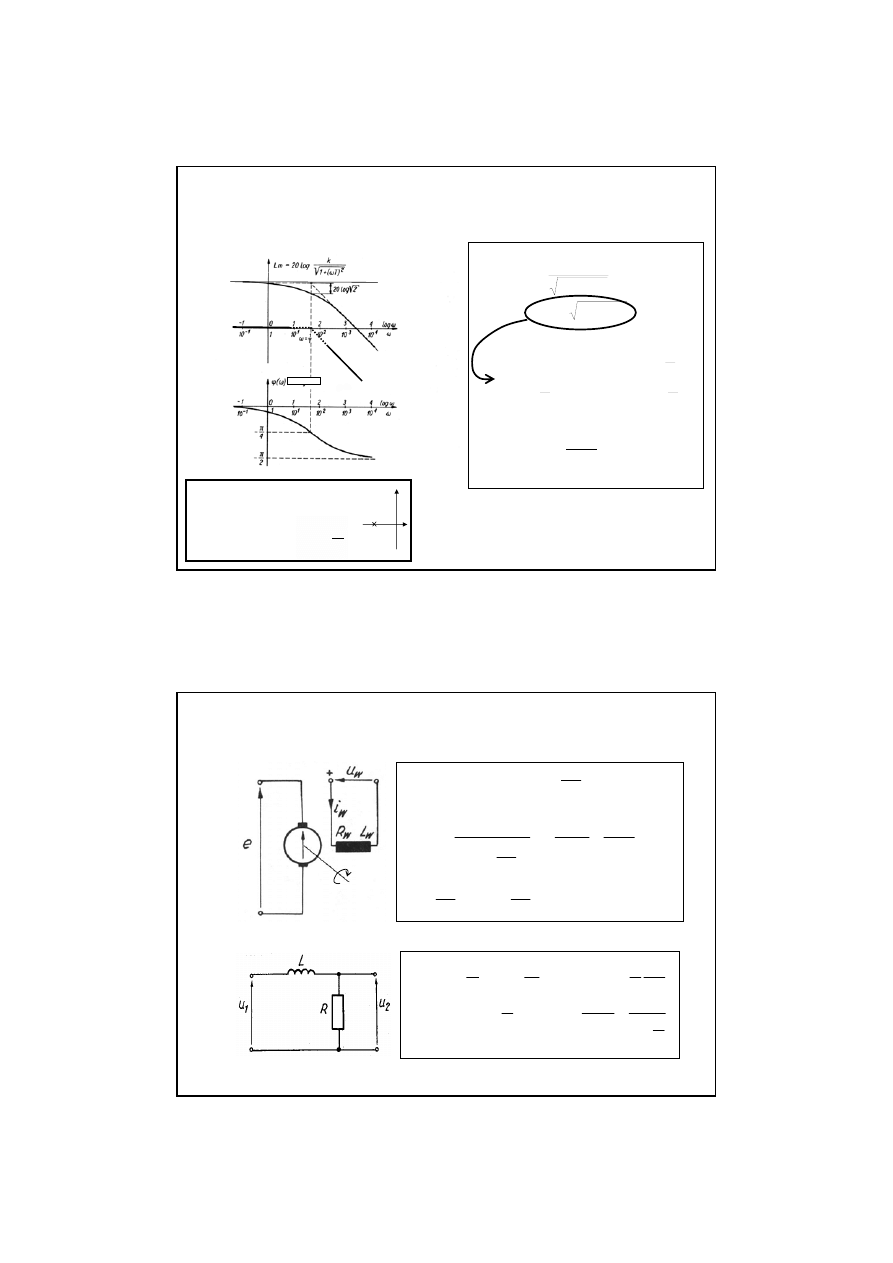
Logarytmiczne charakterystyki amplitudy i fazy (ch-ki Bodego)
20log(k)
20
log
(1/T
)-2
0lo
gω
=arctg(-
ωT)
>>
ω
ω
−
<<
ω
ω
+
−
=
ω
+
=
T
1
dla
log
20
T
1
log
20
T
1
dla
0
)
T
(
1
log
20
k
log
20
)
T
(
1
k
log
20
Lm
2
2
)
T
(
arctg
)
(
P
)
(
Q
arctg
)
(
ω
−
=
ω
ω
=
ω
ϕ
Zera nie ma
Rozkład zer i biegunów:
Bieguny: ═►
T
1
s
−
=
j
ω
δ
-1/T
16
L.Morawski
Człony inercyjne
ω
w
p
w
w
w
w
w
w
w
w
w
w
w
p
w
w
w
w
w
p
R
k
k
,
R
L
T
sT
1
k
)
s
(
U
E(s)
,
s
R
L
1
R
)
s
(
U
)
s
(
I
)
s
(
sLI
)
s
(
I
R
)
s
(
U
),
s
(
I
k
)
s
(
E
dt
di
L
i
R
u
i
k
e
=
=
+
=
+
=
+
=
⋅
=
+
=
⋅
=
Prądnica prądu stałego
Czwórnik LC
R
L
s
1
1
)
s
(
U
)
s
(
U
)
s
(
U
R
L
s
)
s
(
U
)
s
(
U
dt
du
R
L
u
u
R
u
i
,
dt
di
L
u
u
1
2
2
2
1
2
2
1
2
2
1
+
=
⇒
+
=
+
=
⇒
=
=
−
9
17
L.Morawski
Człony inercyjne
C
R
2
R
1
+
u
1
u
2
sC
1
C
j
1
z
s
j
c
=
ω
=
=
ω
C
R
T
,
R
R
k
C
sR
1
R
R
R
sC
1
R
sC
1
R
Z
Z
)
s
(
U
)
s
(
U
2
1
2
2
1
2
1
2
2
R
C
||
R
1
2
1
2
=
−
=
+
−
=
+
⋅
−
=
−
=
R
C
u
1
u
2
|||
sRC
1
)
s
(
U
sC
1
sC
1
R
)
s
(
U
)
s
(
U
1
1
2
+
=
+
=
p
p
1
2
C
sR
1
1
)
s
(
P
)
s
(
P
+
=
]
s
/
[m
Q
[A]
i
]
[N/m
p
[V]
u
3
2
↔
∆
↔
∆
]
N
/
m
[
-
C
dt
dp
C
Q
]
[Ns/m
-
R
Q
R
p
5
p
p
5
p
p
→
=
→
⋅
=
∆
18
L.Morawski
Człony inercyjne
Silnik prądu stałego (obcowzbudny)
sterowany w obwodzie wirnika
ω
R
e
i
U
w
u
sT
1
k
k
k
RJ
s
1
k
1
)
s
(
U
)
s
(
)
s
(
G
dt
d
k
J
i
M
M
i
k
M
dt
d
J
M
k
e
e
i
R
u
'
1
'
'
'
1
e
'
1
e
'
+
=
⋅
+
=
Ω
=
ω
=
⇒
=
⋅
=
ω
=
ω
⋅
=
+
⋅
=
- moment bezwładności
- moment elektryczny
10
19
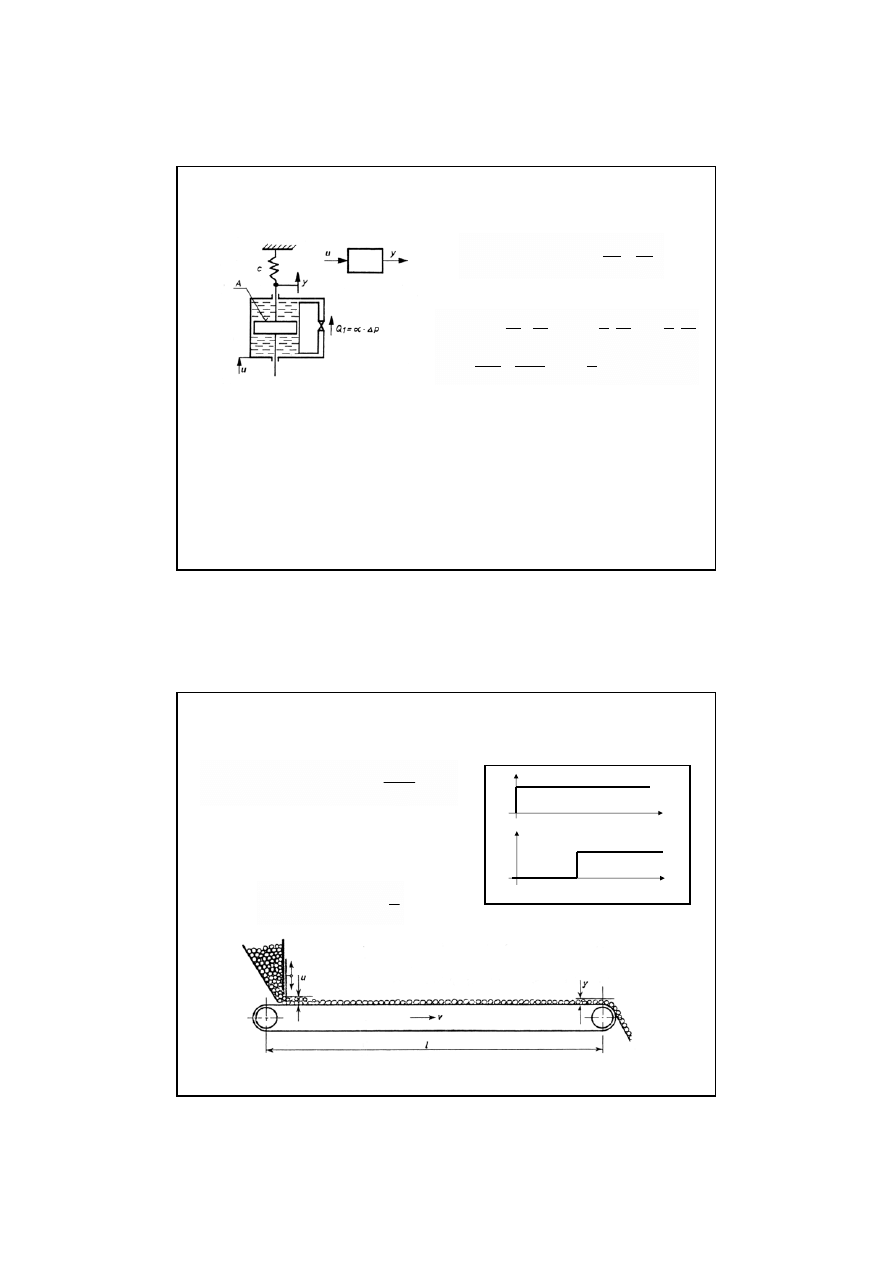
L.Morawski
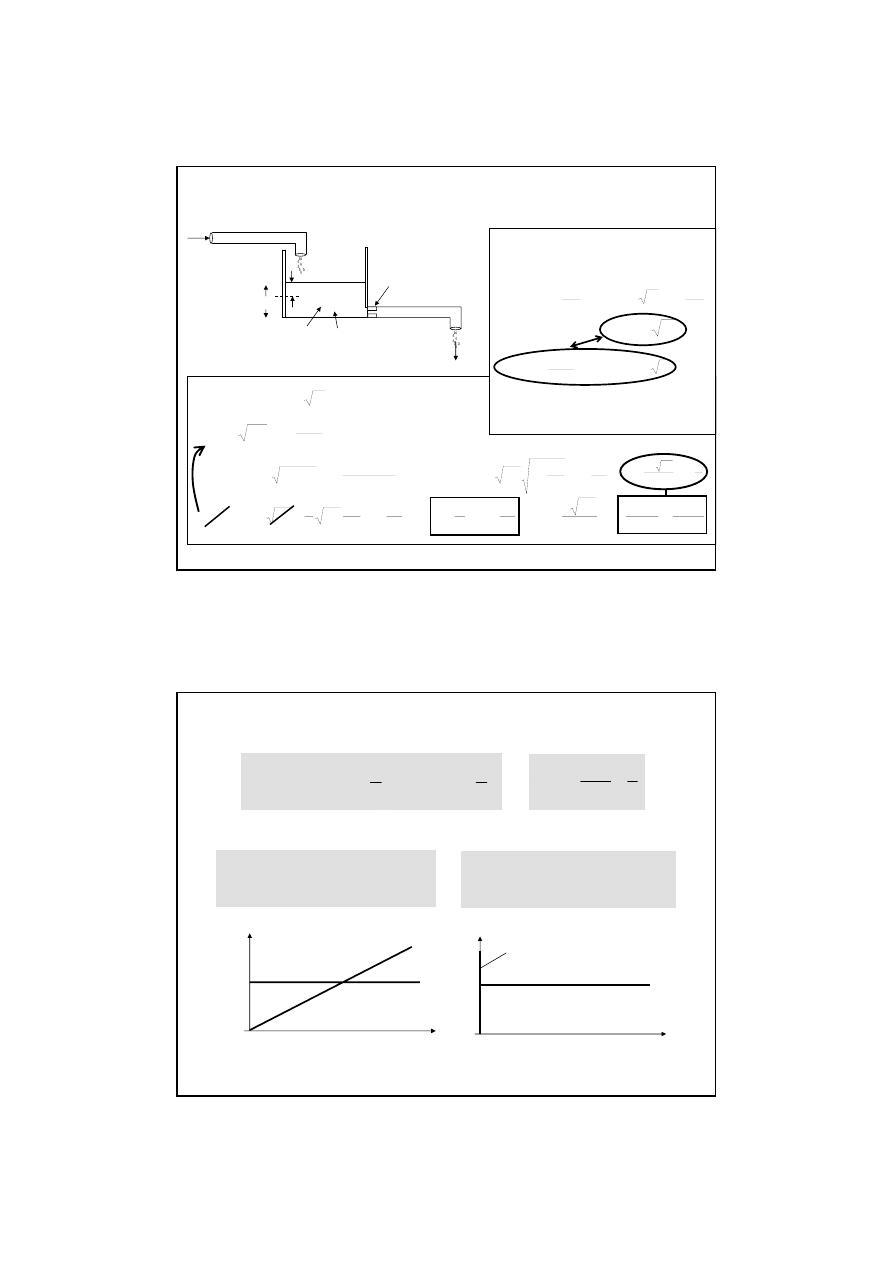
Człony inercyjne
(tłumienie wypływu)
S-powierzchnia wypływu
R -zwężka
Zbiornik posiada swobodny wypływ
Q
s
tłumiony zwężką R. Dla zbiornika
bilans materiałowy jest następujący:
dt
dH
A
H
K
Q
,
dt
dH
A
Q
Q
E
s
E
=
−
=
−
(wypływ)
(wysokość)
(dopływ)
(objętość)
H
V
Q
E
Q
S
h
H
0
A (powierzchnia zb.)
H
K
Q
s
=
swobodny wypływ
H
k'
v
2
mv
mgH
2
⋅
=
⇒
=
H
K
S
v
Q
s
⋅
=
⋅
=
dla punktu równowagi Q
s0
, H
0,
spełniona jest zależność:
E0
E
E
E0
E
0
0
ja
linearyzac
0
0
0
E
Q
q
,
q
Q
Q
,
H
h
,
h
H
H
0
dt
dH
A
H
K
Q
<<
+
=
<<
+
=
=
=
−
⇒
dt
dh
A
H
h
1
H
K
q
Q
,
dt
)
h
H
(
d
A
h
H
K
q
Q
0
0
E
0
E
0
0
E
0
E
=
+
−
+
⇒
+
=
+
−
+
sT
1
k
)
s
(
Q
)
s
(
H
K
H
2
C
,
dt
dh
A
h
C
1
-
q
,
dt
dh
A
H
h
H
2
1
H
K
q
Q
E
0
E
0
0
0
E
0
E
+
=
⇒
=
=
⇒
=
−
−
+
A
1
k
,
K
H
A
2
T
0
=
=
20
L.Morawski
Człony całkujący
∫
∫
=
τ
τ
=
τ
τ
=
t
0
t
0
T
1
k
d
)
(
u
T
1
d
)
(
u
k
)
t
(
y
s
k
)
s
(
U
)
s
(
Y
)
s
(
G
=
=
Odpowiedź jednostkowa
t
kA
dt
)
t
(
1
A
k
)
t
(
h
)
t
(
y
t
0
⋅
=
⋅
=
=
∫
∫
⋅
=
τ
τ
δ
=
=
t
0
)
t
(
1
k
d
)
(
k
)
t
(
g
)
t
(
y
Odpowiedź impulsowa
u(t)
h(t)
kAt
A·!(t)
t
u(t)
g(t)
k·!(t)
t
δ(t)
11
21
L.Morawski
Człon całkujący
0
)
P(
),
(
Q
k
j
j
k
)
s
(
G
)
j
(
G
j
s
=
ω
ω
=
ω
−
=
ω
=
=
ω
ω
=
Charakterystyki amlitudowo-fazowe (Nyguista)
P(
ω)
Q(
ω)
ω=∞
ω=0
+
Logarytmiczne charakterystyki amlitudy i fazy
(Bodego)
(
)
2
)
j
(
G
arg
)
(
,
log
20
k
log
20
|
)
G(j
|
20log
k
j
j
k
)
s
(
G
)
j
(
G
j
s
π
−
=
ω
=
ω
ϕ
ω
−
=
=
ω
⇒
ω
−
=
ω
=
=
ω
ω
=
log
ω
log
ω
20log|G|
ϕ(ω)
20logk
-20
logω
ω=1
−π/2
Zera nie ma
Rozkład zer i biegunów:
Bieguny: ═►
0
s
=
j
ω
δ
s
22
L.Morawski
Człon całkujący
RC
T
RC
1
-
k
RCs
1
R
sC
1
)
s
(
U
)
s
(
U
)
s
(
G
1
2
=
=
−
=
−
=
=
Przykłady członów całkujących
C
R
+
u
1
u
2
sC
1
C
j
1
z
s
j
c
=
ω
=
=
ω
s
k
)
s
(
U
)
s
(
Y
)
s
(
G
=
=
12
23
L.Morawski
Człon całkujący
τ
τ
ω
=
α
=
=
∫
ω
t
0
)d
(
k
(t)
s
k
)
s
(
)
s
(
)
s
(
G
α
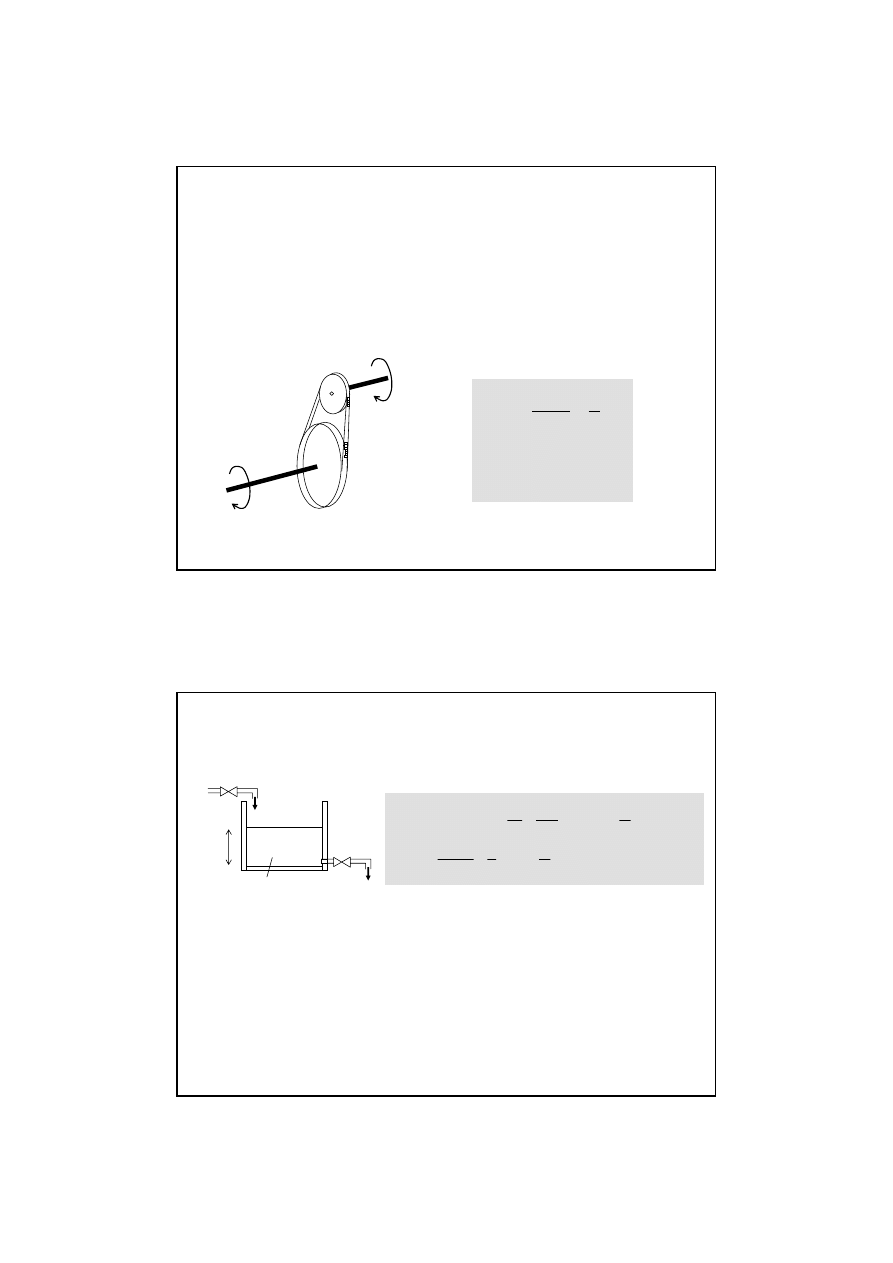
Przykładem członu całkującego jest np licznik odległości, licznik
obrotów, przekładnia mechaniczna jeśli jako wymuszenie przyjmie się
prędkość kątową koła , wałka napędowego
ω natomiast za wyjście
wskazania licznika lub kąt położenia wałka przekładni
ω
α-kąt
24
L.Morawski
Człon całkujący
A
1
k
s
k
)
s
(
Q
)
s
(
H
)
s
(
G
d
)
(
Q
A
1
h
A
Q
dt
dh
dt
Q
Adh
we
t
0
we
we
we
=
=
=
τ
τ
=
⇒
=
⇒
=
∫
Przykłady członów całkujących
Q
we
A-pole powierzchni
h
13
25
L.Morawski
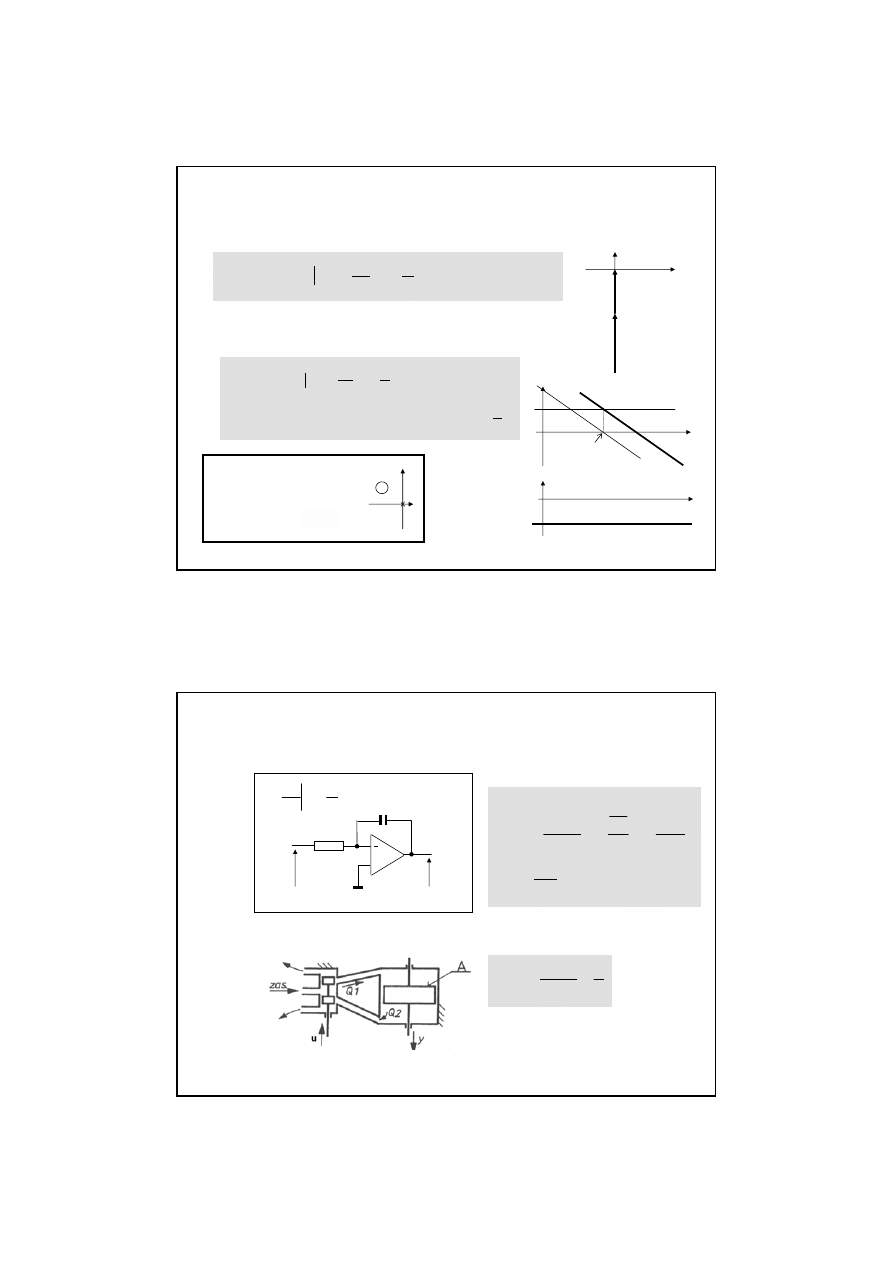
Człon różniczkujący
Odpowiedź członu na wymuszenie skokowe
Transmitancja
k - współczynnik wzmocnienia
ks
)
s
(
U
)
s
(
Y
)
s
(
G
=
=
Równanie różniczkowe
dt
du
k
)
t
(
y
=
20logk
1
Charakterystyka Bode’go
2
)
(
,
20log
20logk
|
G
|
20log
jk
)
s
(
G
)
j
(
G
j
s
π
=
ω
ϕ
ω
+
=
ω
=
=
ω
ω
=
Zera:
Rozkład zer i biegunów:
Bieguny: brak
0
s
=
j
ω
δ
s
26
L.Morawski
Człon różniczkujący
Charakterystyka amplitudowo-fazowa
0
)
P(
)
(
Q
jk
)
s
(
G
)
j
(
G
j
s
=
ω
ω
=
ω
=
=
ω
ω
=
P(
ω)
Q(
ω)
ω=0
+
ω→
∞
Przykłady:
C
R
+
u
1
u
2
sC
1
C
j
1
z
s
j
c
=
ω
=
=
ω
-RC
k
RCs
sC
1
R
(s)
U
(s)
U
G(s)
1
2
=
−
=
−
=
=
Ze względu na złą polaryzację wej.”-”
wzmac. oraz podatność na zakłócenia o
dużej częstotliwości układ rzadko jest
stosowany
14
27
L.Morawski
1. Sprężyna: za wymuszenie przyjmujemy siłę działającą na sprężynę, a za odpowiedź
prędkość „v” przesuwania się końca sprężyny.
Człon różniczkujący
Przykłady idealnego członu różniczkującego:
Stąd otrzymujemy transmitancje operatorową:
gdzie
m
t
-
m
c
u
f
dt
du
(t)
v
d
)
(
v
C
1
f
=
=
τ
τ
=
∫
∞
m
C
- współczynnik sprężystości
Po przekształceniu Laplace’a
)
(
1
)
(
s
V
sC
s
F
m
=
m
sC
s
F
s
V
s
G
=
=
)
(
)
(
)
(
2. Kondensator
sC
)
s
(
U
)
s
(
I
)
s
(
G
dt
du
C
)
t
(
i
c
c
c
c
=
=
⇒
=
C
i
c
u
c
28
L.Morawski
Rzeczywisty człon różniczkujący
Odpowiedź członu na
wymuszenie skokowe
Charakterystyka Bode’go
Transmitancja
k - współczynnik wzmocnienia
T – stała czasowa
sT
1
ks
)
s
(
G
+
=
Równanie różniczkowe
dt
dx
k
)
t
(
y
dt
dy
T
=
+
Zera:
Rozkład zer i biegunów:
T
1
s
−
=
0
s
=
Bieguny:
j
ω
δ
s
-1/T
15
29
L.Morawski
2
2
2
2
T
4
k
Q
T
2
k
P
=
+
−
Rzeczywisty człon różniczkujący
Charakterystyka amplitudowo-fazowa (Nyquista)
T
1
k
)
(
Q
T
1
T
k
)
(
P
T
1
k
j
T
1
T
k
)
T
j
1
(
)
T
j
1
(
)
T
j
1
(
jk
)
s
(
G
)
j
(
G
2
2
2
2
2
2
2
2
2
2
j
s
ω
+
ω
=
ω
ω
+
ω
=
ω
ω
+
ω
+
ω
+
ω
=
ω
−
⋅
ω
+
ω
−
⋅
ω
=
=
ω
ω
=
0
k/2T
0
Q(
ω)
k/T
k/2T
0
P(
ω)
∞
1/T
0
ω
ω=0
ϕ(ω)=45
o
ω=∞
ω=1/T
k/2T
k/2T
Q(
ω)
P(
ω)
30
L.Morawski
Rzeczywisty człon różniczkujący
RC
T
sT
1
sT
)
s
(
U
)
s
(
U
)
s
(
G
1
2
=
+
=
=
C
R
2
+
u
1
u
2
sC
1
jωω
1
z
s
jω
c
=
=
=
R
1
C
R
T
C
R
k
sT
1
ks
C
sR
1
C
sR
sC
1
R
R
)
s
(
G
1
2
1
2
1
2
=
=
+
=
+
=
+
−
=
16
31
L.Morawski
Rzeczywisty człon różniczkujący
−
⋅
=
⋅
=
⋅
dt
dy
dt
du
B
)
t
(
v
B
)
t
(
y
c
v(t) - prędkość tłoczka względem cylindra
c
B
T
sT
1
Ts
)
s
(
U
)
s
(
Y
)
s
(
G
dt
du
c
B
y
dt
dy
c
B
dt
dy
dt
du
B
)
t
(
y
c
=
+
=
=
⋅
=
+
⋅
⇒
−
⋅
=
⋅
32
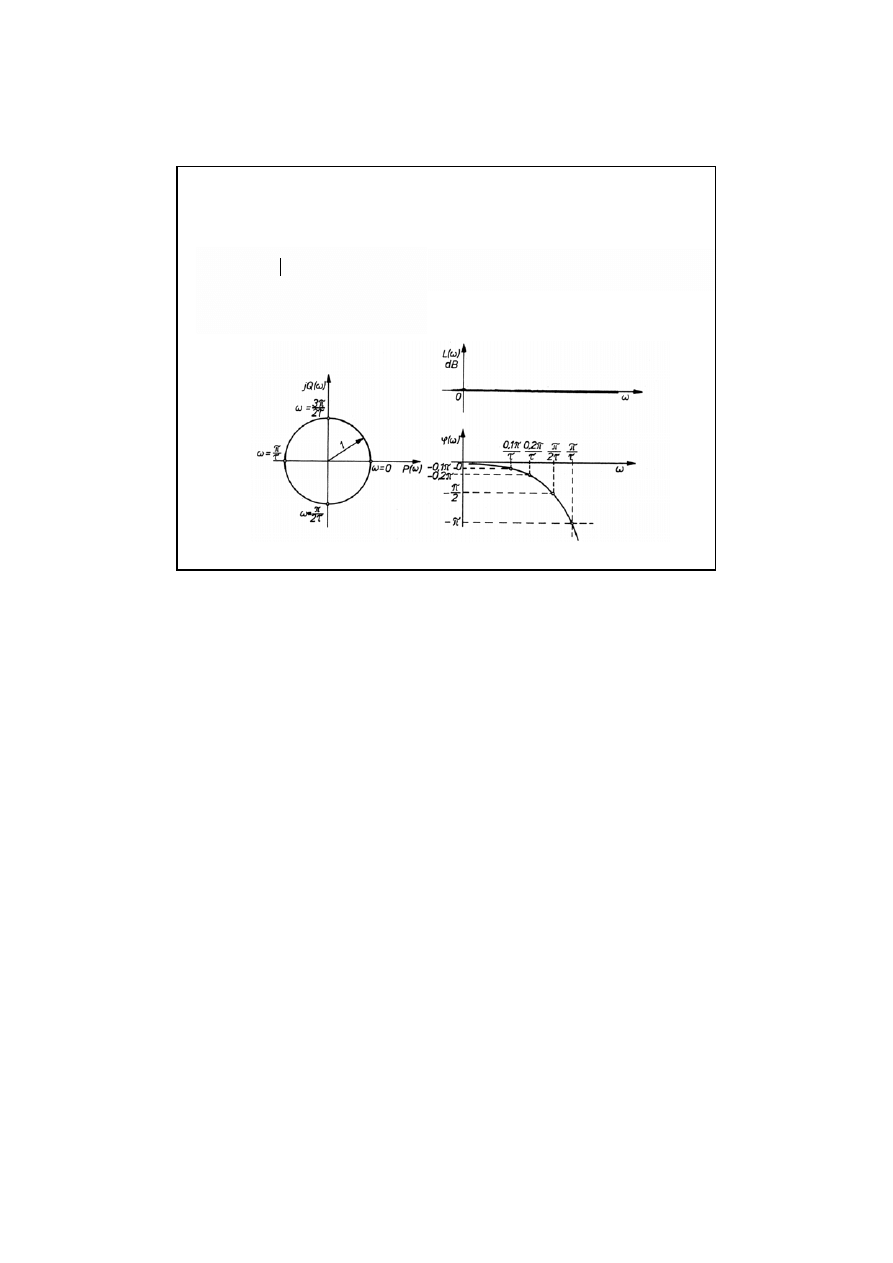
L.Morawski
Człon opóźniający
τ
−
=
=
⇔
τ
−
=
s
e
U(s)
Y(s)
G(s)
)
t
(
u
y(t)
u(t)
y(t)
t
t
τ
Odpowiedź na skok jednostkowy
Przykład:
v
l
)
t
(
u
y(t)
=
τ
τ
−
=
17
33
L.Morawski
Człon opóźniający
Logarytmiczne charakterystyki amplitudy i fazy
)
-sin(
)
Q(
)
cos(
)
P(
)
jsin(
-
)
cos(
e
G(s)
)
G(j
j
j
s
ωτ
=
ω
ωτ
=
ω
ωτ
ωτ
=
=
=
=
ω
ωτ
−
ω
=
ωτ
−
=
ω
ϕ
=
=
=
)
(
0
)
1
log(
20
|
G
|
log
20
Lm
Charakterystyki amplitudowo-fazowe
Wyszukiwarka
Podobne podstrony:
Podstawowe człony regulacji
Projekt podstawowe człony dynamiczne
Podstawowe człony układu automatyki
Podstawowe człony automatyki sprawozdanie
Podstawowe człony automatyki sprawozdanie1
cw7 podstawowe człony dynamiczne
Podstawowe czlony dynamiczne id Nieznany
syposz,podstawy automatyki, PODSTAWOWE CZŁONY DYNAMICZNE
Podstawowe czlony2
Podstawowe człony dynamiczne
Podstawowe człony automatyki
Podstawowe człony automatyki sprawozdanie
Podstawowe czlony automatyki sp Nieznany
Podstawowe człony dynamiczne
Podstawowe człony regulacji
Projekt podstawowe człony dynamiczne
więcej podobnych podstron