1.
Jednostki podstawowe i pomocnicze układu SI
Układ SI wprowadza zasadę spójności układu opartego o siedem
jednostek podstawowych:
-
metr (długość) -kilogram (masa) -sekunda (czas) -amper (natężenie prądu
elektrycznego) -kelwin (temperatura) -
mol (ilość materii) -kandela
(światłość)
Jednostki pomocnicze:-
radian (kąt płaski) -steradian (kąt bryłow)
2.
Zasada tworzenie jednostek pochodnych i wielokrotnych
układzie SI
Jednostki pochodne:
[X]=m
a
∙kg
b
∙s
c
∙A
d
∙K
e
∙mol
f
∙cd
g
Jednostki wielokrotne(zasady):
-
przed nazwą/oznaczeniem jednostki miary umieszcza się, bez przerwy
oddzielającej lub jakiegokolwiek innego znaku, nazwę/oznaczenie
przedrostka
-
do nazwy/oznaczenia jednostki miary dołącza się tylko jedną
nazwę/oznaczenie przedrostka
1nm nie 1mμm
-
dziesiętne wielokrotności i podwielokrotności kilograma wyraża się przez
dołączenie odpowiednich nazw/oznaczeń przedrostków do wyrazu „gram”
10
-6
kg
= 1mg nie 1μkg
-
mnożnik wyrażony nazwą/oznaczeniem przedrostka odnosi się do
jednostki miar w pierwszej potędze
-
wykładnik potęgowy odnoszący się do jednostki miary dotyczy również
mnożnika
1cm
3
=(10
-2
m)
3
-
przedrostki nie występują same (bez liczby) np. 2 m/s nie m/s
3.
Różnica między pomiarem a obserwacją (przykład)
Wyniki obserwacji są: Subiektywne , Niejednoznaczne, Niekompletne,
J
akościowe ( brak ścisłych wartości), Pośrednie
Własności pomiaru: Obiektywność opisu, Zwięzłość, Precyzyjność i
dokładność, Możliwość wyrażenia właściwości w języku matematyki
Przykład: obserwacja siły wiatru poprzez obserwacje ruchu drzew, pomiar
wiatru
odpowiednim przyrządem
Pamięć wzorca
OBSERWACJA
POMIAR
Porównanie
4.
Międzynarodowa i krajowa służba miar
Zadania służby metrologicznej: Zapewnianie jednolitości i rzetelności
miar w poszczególnych krajach i wymianie miedzy narodowej,
Dos
konalenie układu jednostek dokładności pomiaru, aby sprostać
rosnącym wymaganiom nauki i techniki
Na świecie: Państwowe Instytuty Metrologiczne W Polsce: Główny Urząd
Miar
5. Co to jest GUM?
Główny urząd miar jest urzędem administracji rządowej właściwym w
sprawach miar i probiernictwa. Zadaniem GUM jest zapewnienie
wzajemnej zgodności i określonej dokładności pomiarów dokonywanych w
Polsce oraz ich zgodność z międzynarodowym systemem miar.
6. Definicja i schemat blokowy procesu pomiarowego
Proces pomiarowy je
st realizowany przez układ pomiarowy, który stanowi
zbiór środków technicznych tak ze sobą sprzężonych, że całość może
służyć do wykonywania wszystkich operacji procesu. Pomiar jako
doświadczenie fizyczne polega na porównaniu nieznanej wartości
mierzonej x
z wartościami znanej wielkości fizycznej w celowo
uformowanej i wprowadzonej do układu pomiarowego
7.
Zasady zaokrąglania liczb przybliżonych, działania arytmetyczne
na liczbach przybliżonych - praktyczna umiejętność stosowania
23,3(6 do 9)= 23,4
23,3(1do 4) 23,2
23,35=23,4 jeśli przed 5 jest liczna nieparzysta zostaje zaokrąglona w górę
23,25=23,2 jeśli przed 5 jest liczna parzysta zostaje nie zmieniona
280+14,35+158+4=452,75=450 bo najmniejsza ilość miejsc znaczących
jest 2MZ
82,3686*125,3=10320,7855
8=10321 (jeśli jedna z liczb zaczyna się od 1 to
mamy XMZ+1, jeśli obie liczby zaczynają się od 1 to mamy XMZ)
Nie uwzględniamy liczby miejsc znaczących wartość stałych np., 1cal=
4,1868J w 4,1868 nie liczymy MZ
8.
Wzory wielkościowy to wzór w których oznaczenia literowe
oznaczają wielkości fizyczne(tj. wartość liczbowa razy jednostka)
Np.
Wzory przystosowane to są wzory wartości liczbowych
Np.
Wzory przystosowane zależą od wyboru jednostek, zaś wzory
wielkościowe są niezależne od tego wyboru.
9.
Wymień i omów 4 etapy uogólnionego procesu pomiarowego.
I etap-
przejęcie ze źródła informacji i następnie wyselekcjonowanie jednej
lub wielu wybranych wielkości interesujących nas w danym przypadku.
II etap-
porównanie przetworzonej i dopasowanej wielkości pomiarowej
wielkością wzorcową i uzyskanie oceny tego porównania
III etap- przetworzenie i dopasowanie uzyskanego wyniku do bloku
opracowania wyników, a następnie do wymagań urządzenia
rejestrującego (np. rejestracja uzyskanych wyników, ujawnienie
przypuszczalnyc
h błędów grubych, zakłóceń, korekta błędów
systematycznych, obróbka statystyczna wyniku, określenie niepewności
uzyskanego wyniku)
IV etap- rejestracja i ujawnienie wyniku pomiaru
10.
Czym różni się bezpośrednia od pośredniej metoda pomiarowa
(podaj przykłady pomiaru obu metodami)?
Metoda bezpośrednia charakteryzuje się tym, że wielkość mierzona X
oraz wielkość wzorcowa W są tego samego rodzaju, a porównanie tych
wielkości pozwala uzyskać wynik w wartościach wielkości
mierzonej(otrzymuje się wynik bez dodatkowych obliczeń) np. pomiar
masy na wadze szalkowej.
Metoda pośrednia wielkość mierzona i wzorcowa W są różnymi
wielkościami fizycznymi, żeby je
porównać trzeba przystosować wielkość mierzoną do porównania jej z
wielkością W lub wyrazić za
pomocą kilku wielkości związanych modelem matematycznym i oddzielnie
porównywanych np.
pomiar mocy P za pomocą amperomierza i woltomierza.
11.
Czym różni się komparacyjna od kompensacyjnej zerowej
metody pomiarowej (podaj przykłady pomiaru obu metodami)?
W metodzie kompensac
yjnej przeciwstawia się działanie wielkości
wzorcowej W, wielkości mierzonej X. Natomiast w metodzie
komparacyjnej porównuje się wartość x wielkości mierzonej X z
odpowiednio przekształconą wartością w wielkości wzorcowej W.
Przekształcenie to następuje za pomocą dodatkowego zbioru liczbowego
K. Elementy tego zbioru określa stosunek x/w = k. Pomiar metodą
kompensacyjną polega na sprowadzeniu do zera różnicy x –w, przy
metodzie komparacyjnej x
– w*k
Przykład pomiaru metodą kompensacyjną ważenie wagą szalkową
równoramienną
Przykład pomiaru metodą komparacyjną wyznaczenie rezystancji
mostkiem Wheatstone`a
12.
W jaki sposób uzyskujemy stan całkowitej kompensacji w
zerowej metodzie kompensacyjnej?
Stan całkowitej kompensacji uzyskujemy w stanie równowagi fizycznej,
gdzie wielkość mierzona i kompensująca są jednakowe i przeciwnie
skierowane. Fizyczne działanie wielkości można kompensować tylko
wtedy, gdy jej sygnał jest nośnikiem energii.
13.
Różnica między klasyczną i różnicową wychyłową metodą
pomiarową (podaj przykłady pomiaru obu metodami).
Metoda klasyczna wychyłowa polega na nierównoczesnym porównywaniu
z wzorcem wielkości, natomiast przy metodzie różnicowej klasycznej
porównuje się równocześnie z wzorcem wielkości i polega na odjęciu od
wartości x wielkości mierzonej X znanej wartości xp i pomiarze różnicy x –
xp
Przykład dla obu metod pomiar długości mikromierzem
14.
Klasa przyrządu, bezwzględny i względny błąd graniczny.
przyrządu pomiarowego określa wartość błędu maksymalnego,
jaki może wystąpić podczas
wykonywanego nim pomiaru.
błąd bezwzględny: wartość błędu liczona adekwatną do danej sytuacji
metodą (jako błąd
maksymalny lub jako błąd statystyczny)
błąd względny: wartość błędu podana jako procent mierzonej wielkości.
W niektórych przypadkach działanie przyrządu pomiarowego (np. pomiar
energii elektrycznej) wymusza takie o
kreślenie błędu maksymalnego, to
znaczy, dla tych metod pomiaru błąd maksymalny pomiaru jest podawany
jako błąd względny. Jednak samo pojęcie błędu względnego jest tak
wygodne w użyciu, że stosuje się je także i tam, gdzie nie ma to czysto
technicznego uza
sadnienia. Błąd względny charakteryzuje użytą metodę
pomiaru, a w mniejszym stopniu sam wynik pomiaru;
15.
Rodzaje oddziaływań będące źródłem niepewności wyniku
pomiaru
Źródło mierzonego pomiaru, Przyrząd pomiarowy, Otoczenie, obserwator
16.
Wpływ, źródła mierzonej wielkości, przyrządu pomiarowego,
otoczenia i człowieka na niepewność wyniku pomiaru.
-
oddziaływanie przyrządu pomiarowego jest wynikiem pobierania
informacji. Układ pomiarowy oddziaływuje przede wszystkim na zjawisko
mierzone i na sygnał opracowywany w tym przyrządzie. Jest wynikiem
pobierania informacji a co za tym idzie pewnej ilości energii źródła.
Zwiększa niepewność.
-
otoczenie oddziałowuje zarówno na źródło jak i na układ pomiarowy, oraz
człowieka (uczucie zmęczenia, osłabienia). Np. zmiana temp może
spowodować wydłużenie mierzonego przedmiotu. Zmiany czynników
zewnętrznych zwiększają niepewność.
-
człowiek może być przyczyną błędów przypadkowych i systematycznych
w stopniu zależnym od usamoczynnienia procesu pomiarowego. Błędy
mogą być przyczyną niedoskonałości zmysłów, brakiem przygotowania,
doświadczenia lub niekorzystny wpływ otoczenia.
17.
Zasady zaokrąglania wyniku pomiaru, praktyczna umiejętność
stosowania.
Pozostawiany cyfry na miejscach znaczących pozostałe skreślamy
Cyfrę na ostatnim miejscu znaczącym zwiększamy o 1 gdy pierwsza
odrzucona >5 i pozostawiamy gdy odrzucona <5
Jeśli pierwsza odrzucona =5 a ostatnia znacząca parzysta to pozostaje
bez zmian, jeśli nieparzysta zwiększamy o 1
18.
Założenia i postać rozkładu normalnego (Gaussa) gęstości
pra
wdopodobieństwa.
Postać:
(wyprowadzenie tego wymaga użycia całek)
Krzywa ta zwana krzywą dzwonową pokazuje jak z przyczyn losowych
grupują się wyniki pomiaru wokół punktu wartości oczekiwanej. Posiada
ona 2 parametry: wartość oczekiwaną (u) i wskaźnik rozrzutu (h)
19.
Porównaj rozkład normalny i jednostajny zmiennej losowej,
wskaż na istotne różnice między nimi.
Rozkład jednostajny (prostokątny) opisuje procesy, w których wszystkie
wartości zmiennej losowej zawarte w pewnym przedziale są jednakowo
prawdopod
obne, a prawdopodobieństwo wystąpienia wartości spoza
przedziału jest równa 0. W rozkładzie normalnym (Gaussa)
prawdopodobieństwo wystąpienia wyniku jest zgodne z krzywą dzwonową
(patrz pyt.
Założenia i postać rozkładu normalnego (Gaussa) gęstości
prawdopo
dobieństwa.)
20. Na czym polega klasowanie zmiennej losowej?
Jest to podział próby w klasach (podzbiorach, przedziałach) najczęściej
jednakowej szerokości jednostronnie domkniętych. Liczbę klas ustalamy w
zależności od liczności próbki.
21.
Parametry rozkładu normalnego zmiennej losowej i ich definicja
(wzory).
2 parametry:
wartość oczekiwaną
i wariancję
22. Na czym polega estymacja punktowa przy statystycznym
opracowaniu wyników pomiaru?
Szacowanie oparte na niedokładnych lub niepewnych danych.
Est. Pkt. To proc
es obliczania parametrów (estymatorów) celem uzyskania
informacji o całej populacji. Nazwa estymacja punktowa wynika z faktu, że
określamy tylko niektóre parametry (punkty) rozkładu, nie interesując się
dystrybuantą(??), ani gęstością prawdopodobieństwa.
23. N
a czym polega estymacja przedziałowa przy statystycznym
opracowaniu wyników pomiaru?
Estymacja przedziałowa, poprzez podanie tzw. przedziałów ufności dla
estymowanych parametrów daje możliwość oceny ich dokładności.
Przedział ufności estymowanego parametru to przedział, którego granice
są funkcjami próby losowej, a prawdopodobieństwo, że estymowany
parametr znajdzie się w jego granicach wynosi 1-α
1-
α – poziom ufności
α – poziom istności
24.
Kiedy stosujemy rozkład normalny a kiedy Studenta przy

statystycznym o
pracowaniu wyników pomiaru?
Rozkład normalny dotyczy nieskończenie wielkiej liczby pomiarów (n = ∞ ).
Praktycznie rozkład ten może być stosowany do estymacji parametrów
populacji na podstawie dużych prób losowych (n ≥ 30).
Rozkład Studenta stosujemy do estymacji parametrów populacji w oparciu
o próby losowe o małej liczebności (n ≤ 30)
25.
Co określa prawdopodobieństwo wystąpienia zmiennej losowej
w danym przedziale <x
1
, x
2
>?
Prawdopodobieństwo, że zmienna losowa przyjmie wartość mniejszą od x
P(X<x) to funkc
ja nazywana dystrybuantą. Jest to funkcja nieciągła
(schodkowa) dla zmiennej losowej skokowej, dla zmiennej losowej ciągłej
jest funkcją ciągłą. Pochodna dystrybuanty zmiennej losowej ciągłej jest
nazywana gęstością prawdopodobieństwa. Na określenie
praw
dopodobieństwa, że zmienna losowa będzie przyjmować wartości z
zadanego przedziału x
1
<X<x
2
pozwala znajomość dystrybuanty lub
gęstości prawdopodobieństwa zmiennej losowej.
26.
Jak określamy szerokość przedziału ufności?
Szerokość przedziału ufności dla wartości oczekiwanej jest miarą
niepewności pomiaru mierzonej wielkości. Im większy przedział ufności,
tym większe prawdopodobieństwo, że w przedziale ufności znajdzie się
estymowany parametr μ, lecz wynik pomiaru jest obarczony większą
niepewnością. Jeżeli z kolei żądamy małej niepewności pomiaru, to wynik
będzie mniej prawdopodobny, bo zmaleje poziom ufności.
27.
Jaka jest różnica między poziomem ufności a poziomem
istotności?
Poziom istotności α określa maksymalne ryzyko błędu, jakie badacz jest
skłonny zaakceptować. Dla α przyjmujemy wartości rzędu 0,05.
Poziom ufności 1 – α to stopień prawdopodobieństwa, iż wynik badania
zarejestrowany w próbie, jest zgodny ze stanem faktycznym. Określany w
%.
Wykład 5
28.
Co rozumiemy pod pojęciem "niepewność" wyniku pomiaru?
Wymień i omów składowe niepewności
Jest to parametr związany z wynikiem pomiaru charakteryzujący rozrzut
wartości, które w uzasadniony sposób można przypisać wielkości
mierzonej.
Na niepewność wyniku pomiaru składa się:
Niepewność typu A – u
A
(x) wyznaczana metodami statystycznymi na
podstawie serii pomiarów – są one wynikiem oddziaływań efektów
losowych
Niepewność typu B – u
B
(x
) wynikająca z niedoskonałości aparatury
pomiarowej
Łączna niepewność wyniku pomiaru – złożona niepewność standardowa
u
C
(x) jest c
ałościową oceną wyniku pomiaru i obejmuje wszystkie źródła
błędów, które dostrzegł eksperymentator.
29.
Co to jest błąd wyniku pomiaru i jaki jest jego związek z
niepewnością pomiaru?.
Błąd wyniku pomiaru jest to różnica pomiędzy uzyskanym wynikiem
pomiaru, a
prawdziwą wartością mierzonej wielkości fizycznej. Jest
skutkiem oddziaływania na pomiar czynników wewnętrznych i
zewnętrznych. Na powstanie błędu mają wpływ zjawiska przypadkowe,
systematyczne i pomyłki.
Niepewność jest pojęciem samodzielnym, niezwiązanym z błędem
pomiaru, a wynikającym z niedoskonałości pomiaru i braku znajomości
dokładnej wartości mierzonej wielkości fizycznej.
30. Co to jest skorygowany wynik pomiaru?
Jeżeli wyniki kolejnych pomiarów w tych samych warunkach są jednakowe,
to wynik pomiar
u traktuje się jako realizację zmiennej zdeterminowanej
obarczonym błędem systematycznym. Jako wartość przybliżoną przyjmuje
się skorygowany wynik pomiaru:
X
m
= X
0
+ p
Gdzie: p = p
I
+ p
M
poprawka zmniejszająca systematyczny błąd
instrumentalny i metody
31. J
aka jest różnica miedzy niepewnością standardową i
niepewnością rozszerzoną?
Niepewność standardowa składa się z niepewności typu A i niepewności
typu B
x
U
x
U
U
B
A
C
2
2
Niepewność rozszerzona jest to iloraz niepewności standardowej i
współczynnika krotności k
a
C
a
U
k
U
32.
Metody szacowania składowych niepewności (typu A i typu B)
Typ A:
Obliczamy estymante wyników pomiaru
i
n
i
x
n
X
1
1
obliczamy estymate S
x
odchylenia standardowego populacji generalnej
2
_
1
1
1
1
x
x
n
S
n
i
X
obliczamy estymate odchylenia standardowego wartości średniej
n
S
S
X
X
typ B
3
grX
x
U
g
33.
Jak określamy niepewność wyniku pomiaru wykonanego
metodą bezpośrednią?
podając niepewność standardową złożoną U
c
x
U
x
U
U
B
A
C
2
2
34.
Jak określamy niepewność wyniku pomiaru wykonanego
metodą pośrednią?
2
2
x
U
dx
d
y
U
dy
d
x
U
c
C
C
35.
W jaki sposób powinien być podany pełny wynik pomiaru?
Podawanie wyniku pomiaru:
-
im hierarchicznie wyższy jest pomiar, tym więcej wymaga się
szczegółowych
informacji o sposobie otrzymania wyniku i jego niepewności,
-
dla każdego pomiaru wszystkie informacje niezbędne do odtworzenia
obliczeń wyniku pomiaru powinny być dostępne dla każdego, kto tego
potrzebuje.
Podając wynik pomiaru, gdy miarą niepewności jest złożona
niepewność standardowa Uc(y) należy:
a) podać pełną definicję wielkości mierzonej Y,
b) podać estymatę y wartości wielkości mierzonej Y i jej złożoną
niepeność
standardową uc(y) łącznie z jednostkami w których są wyrażone,
c) podać gdy zachodzi tego potrzeba, względną złożoną niepewność
standardową uc(y)/|y|.
Preferuje się podawanie wyniku pomiaru w jednej z poniższych form:
- .ms = 100,02147g z uc = 0,35 mg.;
- .ms = 100,02147(35) g.
(liczba w nawiasie jest wartością uc odniesioną
do
ostatnich cyfr podawanego wyniku);
- .ms = 100,02147 (0,000 35) g.
(liczba w nawiasie jest wartością uc
wyrażoną
w tej samej jednostce co wynik);
Podając wynik pomiaru, gdy miarą niepewności jest niepewność

Uc(y)
należy:
a) podać pełną definicję wielkości mierzonej Y,
b) podać wynik pomiaru jako Y = y ± U łącznie z jednostkami y i U,
c) podać wartość kα przyjętą do obliczenia U,
d) podać przybliżoną wartość poziomu ufności 1 . α związanego z
przedziałem y ± U oraz podać sposób jego wyznaczenia.
e)
podać gdy zachodzi tego potrzeba, względną niepewność rozszerzoną
U/|y|,
36.
Wymień i krótko scharakteryzuj znane Ci metody opracowania
wyników pomiaru
Tabelaryczna
Polega na zestawieniu danych w postaci uporządkowanej
listy wartości liczbowych zaokrąglonych do ostatniego miejsca
znaczącego. Mogą to być dane uzyskane bezpośrednio z etapu
porównywania, zestawione dla poszukiwania, ujawniania i eliminowania
niepewności systematycznych lub dane wstępnie opracowane przez
uwzględnienie poprawek eliminujących niepewności systematyczne.
Graficzna
Polega na przyporządkowaniu dla wielkości jednowymiarowych
każdej zmierzonej wartości punktu na prostej zwanej osią liczbowa.
Przedstawianie wyników za pomocą punktów na osi lub odcinków jest
mało czytelne, więc często zastępuje się je wykresami słupkowymi lub
kołowymi.
Analityczna Polega na przedstawieniu danych eksperymentalnych za
pomocą równania ilustrującego zależność pomiędzy wartościami
zmiennych pochodzących z pomiaru
37.
Zasady graficznego przedstawiania wyników pomiaru
Polega na przyporządkowaniu każdej zmierzonej wielkości punktu na
prostej zwanej osią liczbową. Prosta ta ma oznaczony początek ,zwrot i
jednostkę długości(określony odcinek).
Współrzędna punktu- odległość punktu naniesionego na oś punktu od
punktu zerowego.
Wykres wstęgowy- na wykresie takim wstęgą o dowolnej szerokości
zastępuje się oś liczbową. Wysokość wstęgi przedstawia odnośną wartość
wielkości.
Wykresy kołowe
Zależności między wielkościami x i y nanosi się na płaszczyznę.
Zalety:
-
obrazowość przedstawiania zależności funkcyjnych pozwalająca na
bezpośrednie prześledzenie przebiegu funkcji, jej ekstremów ,punktów
przegięcia itp.
-
prostotą sporządzenia i posługiwania się wykresami
Rodzaje skal funkcyjnych na osiach układu współrzędnych:
-
skala równomierna ,której osie są opisane równaniami liniowymi:
ŋ=b*y
-skala logarytmiczna
ŋ=b*log(y)
-
skala półlogarytmiczna

ŋ=b*log(y)
Zalecenia doboru skali:
-
zmienna niezależna powinna być odkładana na osi poziomej
-
skalę należy wybrać w ten sposób aby współrzędne punktów mogła być
szybko iłatwo odczytana
-
skale nie muszą zaczynać się od 0 lecz ich graniczne punkty należy
dobierać odpowiednio do najniższych i najwyższych wartości zmiennych
-
skale zmiennych należy wybrać w ten sposób aby nachylenie krzywej w
jej najbardziej interesującym obszarze było zbliżone do 1 lub –1
Kreślenie krzywej:
Dane z pomiarów zaznaczamy tylko w postaci punktów. Gdy dane
pochodzą z obliczeń zwykle nie zaznacza się punktów na wykresie z
wyjątkiem eksperymentu komputerowego. Należy pamiętać o wygładzeniu
danych pomiarowych i dążyć do wykreślenia możliwie gładkiej prostej.
38.
Metody wyznaczania stałych równania opisującego wyniki
eksperymentu. Ich zalety i wady.
39. Graficzne metody lini prostej:
Metoda jest nie
jednoznaczna ,wartości stałych zależą od subiektywnie
poprowadzonej prostej.
Metoda wybranych punktów: Wartość
wyznaczonych stałych jest zależna od wyboru m punktów ze zbioru
danych eksperymentalnych.
Metoda zerowych różnic w grupach: Wartość stałych zależą od sposobu
podziału zbioru danych eksperymentalnych na m grup -
niejednoznaczność.
Metoda najmniejszej sumy kwadratów różnic: W tej metodzie
zakładamy że wartości eksperymentalne najlepiej opisze równanie dla
którego suma kwadratów różnic osiąga minimum. W przypadkach
ogólnych musimy korzystać z innych metod( metoda lini prostej , metoda
wybranych punktów)
Metoda kolejnych przybliżeń: Pozwala na poprawienie wyników
otrzymanych w wyniku stosowania innych metod.
40.
Istota metody wybranych punktów wyznaczania stałych
równania analitycznego - praktyczna umiejętność stosowania.
Polega na wyborze ze zbioru danych eksperymentalnych liczby m danych
,równej liczbie m stałych, przyjętej postaci równania; wybiera się punkty
możliwie równomiernie rozłażone z pominięciem stref granicznych;
Współrzędne wybranych punktów wstawiamy do równania opisującego
zależność x i y. Stałe wyznaczamy rozwiązując otrzymany układ równań w
postaci wyznacznikowej.
41.
j.w. dla metody "zerowych różnic w grupach".

Zbiór danych dzielimy na m grup gdzie m jest równe liczbie stałych
przyjętej postaci równani
Dla każdego punktu wyznaczmy różnice pomiędzy
. Dla każdej z
tych grup zawierającej N
m
punktów pomiarowych żądamy aby suma
różnic v
i
była równa 0. Z tych równań wyznaczamy stałe a.
42.
metoda najmniejszej sumy kwadratów
W metodzie tej poslugujemy sie podobnie jak w metodzie "srednich",
roznicami Vi. Przyjmujemy tu zalozenie, ze wartosci eksperymentalne
najlepiej opisze rownanie, dla ktorego suma kwadratow roznic Vi osiaga
minimum.
Wykład 7/8
43.
Co składa sie na model matematyczny przyrzadu pomiarowego?
Równanie przetwarzania łacznie ze schematem przyrzadu pomiarowego
44. Co to jest wzorcowanie, cechowanie, legalizacja przyrzadu
pomiarowego?
wzorcowanie - proces doswiadczalnego wyznaczania charakterystyki
statycznej.
wzorcowanie przeprowadza sie w wzrunkach ustalonych, tzw. warunkach
odniesienia przy stalym poziomie wielkosci wplywajacych(X1,X2...) i
doprowadzonej z zewnatrz energii e.
legalizacja - zatwierdzenie danego przyrzadu pomiarowego cechowanie -
Polega na dokładnym sprawdzeniu czy dany produkt spełnia
określone normy jakości, a następnie oznakowanie go w nieusuwalny
łatwo sposób. Cechowaniu podlegają zwłaszcza urządzenia pomiarowe
stosowane w handlu -
np. wagi i odważniki.
44/46. co to jest charakterystyka statyczna przyrzadu pomiarowego?
zaleznosc wielkosci wyjsciowej Y od mierzonej wielkosci wejsciiowej X
przy
stalym poziomie wielkosci wplywajacych Xi i energii pomocniczej e.
Charakterystyka ta jest wyznaczana doswiadczalnie na stanowiskach
badawczych.
45.
Jak możemy wyznaczyć charakterystyke statyczną przyrządu
pomiarowego?
Charaktrerystyka ta na ogół jest wyznaczana doświadczalnie na specjalnie
skonstruowanych stanowiskach badawczych
47. Charakterystyka statyczna elek
trycznego pzetwornika siły dana
jest zależnością:
a. I=0,258*F+4
[mA]
F<0,60 daN>
b. I=0,0048*F(kwadrat)+0,258*F+4
[mA]
F<0,60 daN>
jaka jest czułość tego przetwornika dla F=0,5 kN?
48.
Co to jest charakterystyka dynamiczna przyrządu i kiedy jej
znajomo
ść jest niezbędna?
charakterystyka dynamiczna jest to zależność wielkości wyjściowej Y i
jej pochodnych względem czasu t od wielkości mierzonej X i jej
pochodnych
względem czasu t wyznaczona w warunkach nieustalonych.
rownanie str. 143 podr
X ma z
naczący wpływ na charakterystyke!
49.
Klasyfikacja przyrządów pomiarowych ze względu na ich
właściwości dynamiczne.
0 rzędu(przyrządy bezinercyjne)
Równanie: Y(t)= k * X(t)
Przyrządy te wiernie przetwarzają sygnał wejściowy na wyjściowy.
Spełniają warunki stawiane przyrządą idealnym. Przyrządy te przenoszą
Wienie wszystkie częstotliwości nie wprowadzając zniekształceń
amplitudowych i fazowych.
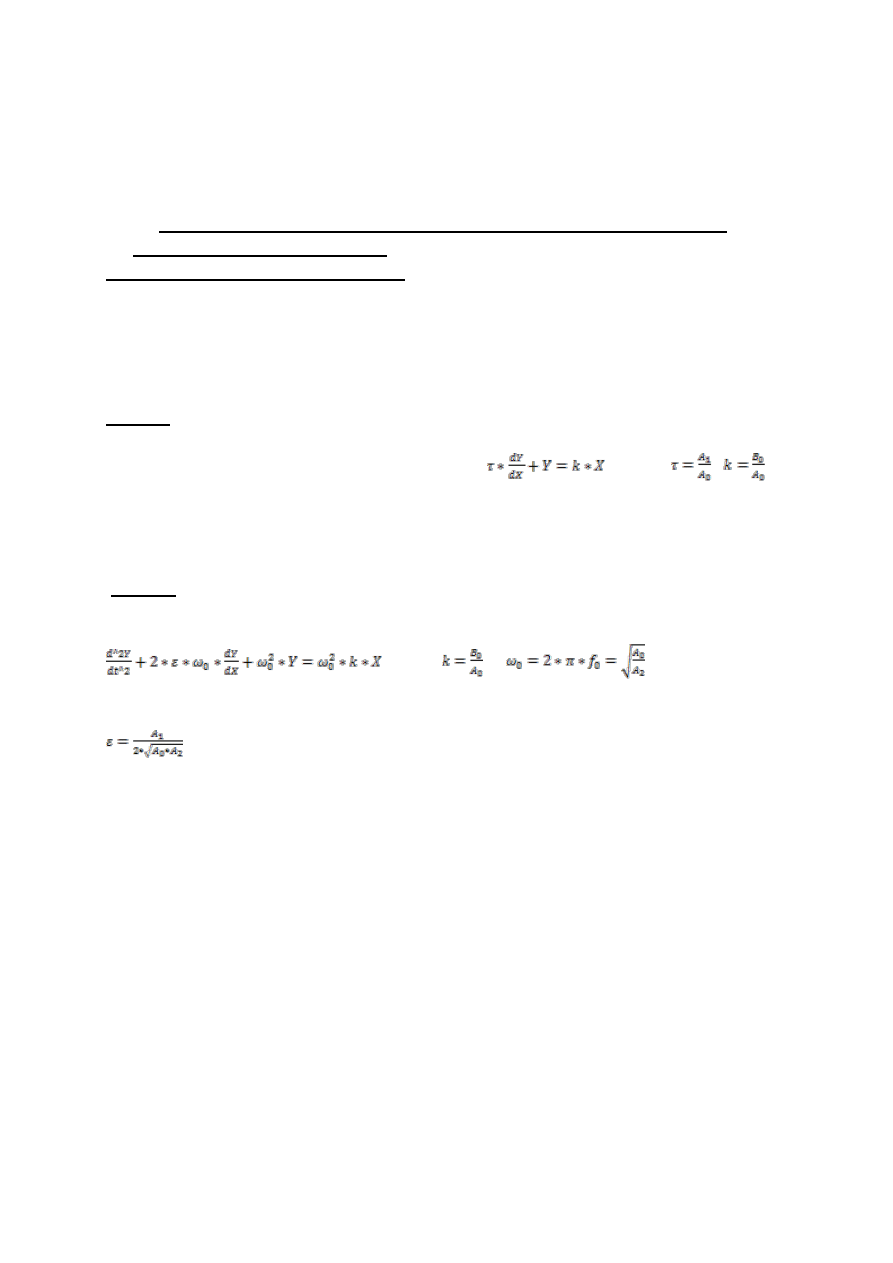
1rzędu
Posiadają 1 element akumulujący energie.
Równanie A
1
*(dY/Dx)+ A
0
*Y = B
0
* X lub
gdzie
Własności dynamiczne zmieniają się znacznie wraz ze zmianą prędkości
wielkości wpływającej.
2rzędu
A
2
*(d^2Y/Dt^2)+ A
1
*(dY/Dx)+ A
0
*Y = B
0
* X
Gdzie
-
częstotliwość
kołowa drgań swobodnych nietłumionych
-
tłumienie względne
Wielkości k, w(omega) E(epsilon) są to parametry określające podstawowe
cechy przyrządów pomiarowych 2 rzędu.
-
Przyrząd ten przenosi niejednakowo sygnały o różnych częstotliwościach
wprowadzając zniekształcenia amplitudowe i fazowe.
-
wzrost częstotliwo drgań nietłumionych powoduje zwiększenie zakresu
płaskiej części charakterystyki amplitudowej
50.
Omów i krótko scharakteryzuj metody wyznaczania właściwości
dynamicznych przyrządów pomiarowych
Analityczna:
Polegają na matematycznym opisie zjawisk fizycznych
zachodzących w przyrządzie pomiarowym z uwzględnieniem zmiany stanu
energetycznego. Dla większości przypadków jest to niemożliwe ze
względu na złożoność zjawisk
Doświadczalne
Badamy poprzez badanie odpowiedzi przyrządu na dowolne wymuszenie.
Sygnały te muszą być proste do technicznej realizacji oraz przystosowane
do opisu matematycznego.
51.
Omów metodę wyznaczania właściwości dynamicznych
przyrządu za pomocą wymuszenia harmonicznego.
Badamy poprzez badanie odpowiedzi przyrządu na dowolne wymuszenie
tj. na dowolny zmienny w czasie sygnał wejściowy. W praktyce jest
stosowanych kilka wybranych wymuszeń zwanych standardowymi
wymuszeniami. Sygnały te muszą być proste do technicznej realizacji oraz
przystosowane do opisu matematycznego.
52.
Jak definiowane jest tłumienie przyrządu pomiarowego?
urządzenie w którym jeden sygnał zmienia sie w inny w celu dogodnego
wykorzystania informacji zawartych w tym sygnale. Wartość sygnału
otrzymanego jest funkcja jednoznaczna sygnału otrzymanego.
w skrócie: urządzenie w którym realizowany jest proces przetwarzania
pomiarowego.
53.
Co to jest przetwornik pomiarowy? Klasyfikacja przetworników.
ze względu na przetwarzanie sygnału:
-rodzaju
sygnału Są tyż wyjściowe i wejściowe.
-
formy sygnału
-
formy sygnału.
54.
Czym różni się przetwornik generacyjny od parametrycznego?
Generacyjne- czynne Parametryczne- bierne
G
.: zmiany sygnału wejściowego generuje sygnał wyjściowy. energia jest
przetwarzana bezpośrednio.
P
: sygnał wejściowy powoduje zmianę sygnału wyjściowego ale do jego
uzyskania niezbędna jest energia pomocnicza.
55.
Na wybranych przykładach omów przetworniki mechaniczne
Mechaniczne-
pierwsze urządzenia pomiarowe znane człowiekowi.
Przeważnie analogowe z wychylnym elementem wskazującym.
Przeznaczone do
pomiarów statycznych. Energia pobierana jest z sygnału pomiarowego.
(przykłady: dźwignie, membrana, mieszek). Do pomiarów ciśnienia i
siły
budowane w oparciu o sprężyny.
56.
Na wybranych przykładach omów przetworniki pneumatyczne
Sygnałem wyjściowym dla nich jest ciśnienie płynu (cieczy/gazu).
Czasem przetwarzanie sygnału jest niemal niezauważalne. Wykazują sie
duża niezawodnością, stosunkowo niskim kosztem i przydatnością do
pracy
w atmosferze wybuchowej. ( sonda Prandtla-
pozwala określić wartość
ciśnienia w przepływach jednowymiarowych- np: rurociągach)
57.
Czym różni się przetwornik indukcyjny od indukcyjnościowego?
indukcyjne
wykorzystują zjawisko indukcji elektromagnetycznej
polegającej na powstawaniu siły elektromagnetycznej na końcach
przewodnika przemieszczającego sie w polu magnetycznym i
przecinającego
linie sil tego pola.
indukcyjnościowe pod wpływem doprowadzonego sygnału następuje
zmiana
indukcyjności przetwornika. To urządzenie składa sie z cewki lub z
zestawu cewek.
59.
Zasada pracy przetworników piezoelektrycznych, ich zalety i
wady.:
Przetworniki piezoelektrycznych wykorzystują w swoim działaniu zjawisko
piezoelektryczności
występujące w niektórych kryształach. Zjawisko to polega na pojawianiu
się ładunków elektrycznych
na ściankach kryształu powstającego w wyniku działania sił przyłożonych
do kryształu. Zjawisko to
najlepiej występuje w dielektrykach o dużej przenikalności dielektrycznej.
Do tej grupy zalic
zane są:
sól Seignette`a , tytanian baru, cyrkonian ołowiu, turmalin i kwarc.
Wady
:zanikanie własności piezoelektrycznych w wysokich temperaturach
(dla kwarcu powyżej 573 st. C)
nie mogą być stosowane do pomiarów statycznych
Zalety: przez odpowiednie wy
cięcie płytki z kryształu kwarcu można
uzyskać stałą piezoelektryczną niezależną od temperatury.
60.
Omów pomiar temperatury badanego elementu przetwornikiem
termoelektrycznym i rezystancyjnym.
W przetwornikach termoelektrycznych wykorzystano zjawisko pojawiania
się siły termoelektrycznej (STE) w miejscu złączenia dwu różnych metali.
Pomiar temperatury polega na tym, że jeden koniec spoiny umieszczony
jest w temperaturze T1 a drugi w temp. T2. Wtedy STE jest wypadkową sił
która jest funkcją dwóch temperatur T1 i T2, przy założeniu, że jedna z
nich jest stała otrzymujemy zależność STE od jednej tylko temperatury.
W przypadku przetwornika rezystancyjnego pod wpływem temperatury
następuje wydłużenie materiału podłoża, wydłużenie siatki oporowej
tensometru, oraz
zmiana rezystancji ternsometru. Zmiany te mogą być
opisane zależnościami matematycznymi. Całkowita zmiana rezystancji
tensometru wywołana zmianami temperatury wynosi:
gdzie :
R
R
T
względna zmiana rezystancji przewodnika pod wpływem
temperatury.
jest to współczynnik zmiany rezystancji z materiału z temperaturą
t
jest to współczynnik wydłużenia termicznego materiału tensometru
p
jest to współczynnik wydłużenia materiału podłoża
T
zmiana temperatury
61.
Zasada pracy przetworników tensometrycznych
W przetwornikach tych wykorzystywane są zjawiska fizyczne
występujące w przewodnikach, półprzewodnikach
i
elektrolitach
powodujące zmianę ich rezystancji. Najczęściej wykorzystywane są te
przetworniki, które wykorzystują
zmianę
wyników
geometrycznych(długość, przekrój poprzeczny ).
62/63
.
Ile zmieni się oporność 100Q tensometru konstantanowego
(K=2,0) pod wpływem zmiany odkształcenia o e=1%?
Ponieważ odkształcenie nie zależy od temperatury korzystamy ze wzoru
:
R
R
= K
⋅
po przekształceniu otrzymujemy wzór
R= R
⋅ K⋅
i po
podstawieniu otrzymujemy, że zmiana oporności wyniesie:
64.
Zasada pracy przetworników pojemnościowych wykonanych w
oparciu o kondensator płaski i ich charakterystyki statyczne.
Przetworniki pojemnościowe działają poprzez zwiększenie pojemności
p
rzetwornika pod wpływem sygnału wejściowego. Elementem czynnym
takiego przetwornika może jest kondensator płaski lub cylindryczny.
Pojemność kondensatora płaskiego określona jest zależnością:
C=
0
r
A
gdzie :
0
przenikalność elektryczna próżni
r
przenikalność elektryczna względna dielektryczne
grubość dielektryka
A
powierzchn
ia czynna płytki.
Zmiana pojemności kondensatora może wynikać ze zmiany: ,
r
,
A
65.
Naszkicuj zmianę czułości pojemnościowego przetwornika
ciśnienia z:
a) zmienną odległością elektrod
wykres ma kształt hiperboli. Nie podawajcie skali (zrobiona przez program
do rysowania)
a)
zmienną powierzchnią elektrod w funkcji sygnału
wejściowego.
Wykres liniowy. ->
(również nie podawajcie skali jak wyżej)
66.
W jakim celu budowane są różnicowe układy
przetworników - podaj przykład układu.
R= 2
Różnicowe układy przetworników budowane są w celu zwiększenia
dokładności pomiaru przy małych zmianach. Przykład: potencjometr,
podwójny kondensator z przesuwną środkową okładką.
67.
Na wejście elektrycznego wzmacniacza prądu a) stałego, b)
zmiennego o wzmocnieniu k = 500 wprowadzono sygnał
harmoniczny o częstotliwości f = 1,2 kHz, amplitudzie 120 mV i
składowej stałej 20 mV. Podaj częstotliwość, amplitudę i składową
stałą na wyjściu wzmacniacza w obu przypadkach
a)Dla prądu stałego: amplituda: 60V; częstotliwość: 1,2kHz; składowa
stała: 10V
b)dla prądu zmiennego: amplituda: 60V; częstotliwość: 1,2kHz;
składowa stała: 0mV
68.
Na czym polega proces filtracji sygnału pomiarowego?
Proces filtracji polega na podzieleniu całkowitego sygnału pomiarowego
doprowadzonego na wejście filtra za 2 części, z których pierwsza zostaje
przez filtr przepuszczona bez zmian, 2 zaś całkowicie wytłumiona. War.
Koniecznym do realizacj
i procesu f. jest występowanie istotnych różnic w
własnościach fiz. miedzy tymi częściami.
69.
Kiedy niemożliwe jest przeprowadzenie procesu filtracji?
Przeprowadzenie procesu f. jest niemożliwe gdy nie występują istotne
różnice we własnościach fiz. miedzy danymi częściami. Ponadto gdy nie
jesteśmy w stanie wyodrębnić cech różniących część sygnału
pomiarowego, która ma być przepuszczona przez filtr, od części, która ma
być wytłumiona .
70.
Podaj charakterystyki filtrów: a) dolnoprzepustowego, b)
górnoprzepustowego, c) pasmowoprzepustowego, d)
pasmowozaporowego.
a) filtr dolnoprzepustowy
– f. który przepuszcza wszystkie informacje
poniżej danej charakterystycznej wielkości, zaś powyżej niej tłumi.
Wielkość ta nosi nazwę dolnej granicznej: np. dolna częstotliwość
graniczna
b) filtr górnoprzepustowy - f. który przepuszcza
wszystkie informacje powyżej danej charakterystycznej wielkości, która
nosi nazwę górnej granicznej:
c) filtr pasmowoprzepustowy
– przepuszcza informacje między dolną
i górną wielkością graniczną. d) filtr pasmowo zaporowy- – tłumi
informacje między dolną i górną wielkością graniczną.
71. Zastosowanie filtracji w metrologii.
W metrologii proc
e filtracji stosowany jest głównie dla wydzielenia z
całkowitego sygnału pomiarowego tej części, która w danym konkretnym
przypadku stanowi informację użyteczną. Sygnał pomiarowy zawiera
bowiem prócz informacji użytecznych również zakłócenia i szumy, które
nie zawierają istotnych dla nas informacji a wręcz dezinformują.
72.
Omów proces modulacji sygnału pomiarowemu, wskaż na
istotne różnice między modulacją amplitudy i częstotliwości.
Modulacja-
proces oddziaływania jednego sygnału zwanego modulującym
na i
nny sygnał zwany sygnałem nośnym. W wyniku procesu modulacji
następuje ścisłe związanie sygnału nośnego z informacją pomiarową
zawartą w sygnale modulującym.
Różnice pomiędzy modulacją częstotliwościową(FM) a amplitudową(AM):
FM
– modulacja częstotliwości, bardziej odporna na zakłócenia
AM
– modulacja amplitudy.
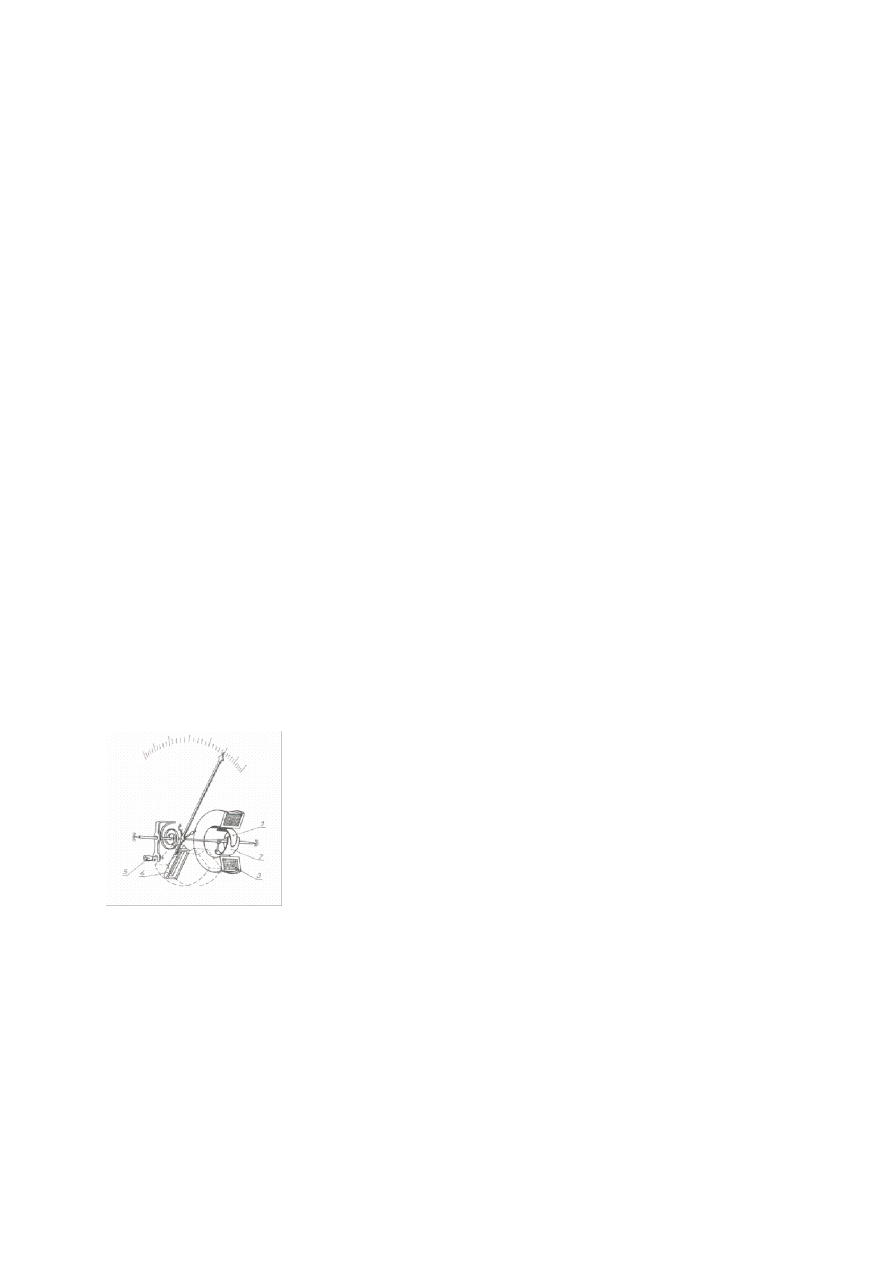
73.
Zasada pracy miernika elektromagnetycznego, równanie
przetwarzania, zastosowanie miernika.
Zasada działania miernika elektromagnetycznego polega na oddziaływaniu
pola magnetycznego cewki przewodz
ącej prąd, na ruchome rdzeń
ferromagnetyczny umieszczony w tym polu. Wskazówka, połączona z
rdzeniem, wskazuje wartość prądu przepływającego przez cewkę. Im
większy prąd przepływa przez cewkę, tym silniej jest wciągany rdzeń, tym
większy jest moment i większe odchylenie wskazówki. Miernik
elektromagnetyczny służy zarówno do pomiaru prądu stałego, jak i
wartości skutecznej prądu przemiennego. Mierniki elektromagnetyczne są
budowane jako amperomierze i jako woltomierze. Mają
nieskomplikowana budowę i charakteryzują się pewnością działania.
Równanie miernika α = c*l²
α – kąt odchylenia wskazówki
l
– długość przewodu w cewce
c
– nie znalazłem tego
Zasada działania miernika elektromagnetycznego
1-
rdzeń nieruchomy
2-
rdzeń ruchomy
3- uzwojenie
4-
tłumik, 5- korektor zera
74. Zalety i wady optycznych metod rejestracji.
Zalety:
niezakłócanie badanego zjawiska przetwornikiem pomiarowym,
możliwość rejestracji przemieszczeń o dowolnych torach, brak
bezwładności pomiaru, możliwość transformacji czasu
75.
Zasada pracy i zakres zastosowań oscyloskopu
elektronicznego.
Oscyloskop jest przyrządem elektronicznym służącym
do obserwowania i badania przebiegów zależności pomiędzy dwoma
wielkościami elektrycznymi, bądź innymi wielkościami fizycznymi
reprezentowanymi w postaci napięcia. Oscyloskop stosuje się najczęściej
do badania przebiegów zmiennych, nawet tych, których okres zmian jest
zbyt mały, by rejestrować je bezpośrednio.Zasada działania oscyloskopu
jest bardzo prosta. Działo elektronowe emituje elektrony, które po
przejściu przez płytki odchylania pionowego i poziomego, uderzają o
luminescencyjny ekran gener
ując obraz. Oscyloskop ma dwa wejścia – X
i Y (poziome i pionowe), z których podawane są napięcia na płytki
odchylania. Oscyloskop jest przyrządem stosowanym najczęściej do
obserwacji na ekranie przebiegu napięcia w funkcji czasu. Poza tym
stosowany może być do pomiaru napięcia, prądu, czasu, częstotliwości,
kąta przesunięcia fazowego, mocy, wyznaczania charakterystyk diod i
tranzystorów i badania wielu innych elementów.
76.
Porównaj gwiazdową i liniową konfigurację systemu
pomiarowego.
W konfiguracji gwiazdow
ej kontroler systemu zajmuje centralną pozycję.
Pośredniczy on w przekazywaniu informacji między poszczególnymi blokami
funkcjonalnymi. Transmisja możliwa jest jedynie między kontrolerem
systemu blokami funkcjonalnymi
– niemożliwe jest bezpośrednie
przekazywanie informacji z jednego bloku funkcjonalnego do innego.
W konfiguracji liniowej wszystkie urządzenia są dołączone równolegle do
magistrali cyfrowej
– żadne z urządzeń nie ma wyróżnionej pozycji.
Kontrolerem może być każde z dołączonych do magistrali urządzeń, o ile
ma zdolność sterowania systemem.
77.
Na czym polega asynchroniczna transmisja sygnału
pomiarowego?
przesył danych, w którym czas pomiędzy przesłaniem znaków może być
różny. Innymi słowy nie używa się sygnału zegarowego, lecz sterowanie
transmisją odbywa się przez bit startu na początku każdego znaku i przez
jeden lub dwa bity stopu na końcu każdego przesłanego znaku.
78.
Omów sposoby doprowadzenia sygnału pomiarowego do
komputera.

Połączenie komputera z badanym obiektem może być realizowane poprzez
do
prowadzenie wstępnie przetworzonych sygnałów pomiarowych:
-
Do karty akwizycji danych DAQ umieszczonej wnętrzu komputera ( karty są
umieszczane bezpośrednio w płycie głównej, oferują różne kombinacje
analogowych, cyfrowych sygnałów wejściowych a także możliwość
bezpośredniej transmisji do pamięci komputera.)
-
Na wejście przyrządów pomiarowych z wyjściowym interfejsem
szeregowym RS lub niestandaryzowanym systemem interfejsu (transmisja
szeregowa jest najprostszą, najtańszą, ale i najwolniejszą metodą
przesyłania danych. Stosuje się ją w prostych systemach pomiarowych
składających się z kontrolera i jednego urządzenia oraz w systemach, w
których występuje konieczność przesyłania danych na duże odległości.
-
Na wejście tzw. Przyrządów systemowych połączonych uniwersalnym
interfejsem pomiarowym z komputerem (interfejs IEC-625 jest
najpopularniejszym interfejsem umożliwiającym łączenie aparatury
kontrolno-pomiarowej i informatycznej w system pomiarowy. Interfejs
umożliwia bezpośrednią współprace przyrządów pomiarowych i sprzętu
informatycznego dołączonych równolegle do wspólnej magistrali.
-Do stacji akwizycji i przetwarzania danych pomiarowych( Standard VXI jest
przeznaczony do sterowania i obsługi zautomatyzowanych, modułowych
systemów pomiarowych i stosowany w różnych dziedzinach.)
79.
Czym charakteryzują się przyrządy wirtualne?
{przyrząd wirtualny składający się z komputera ogólnego przeznaczenia i
dołączonych do niego sprzętowych bloków funkcjonalnych, którego funkcje i
możliwości określone są przez oprogramowanie, a obsługa odbywa się za
pomocą ekranu komputerowego, klawiatury, i/lub myszy z wykorzystaniem
graficznego interfejsu użytkownika.
Wyszukiwarka
Podobne podstrony:
Kolokwium 2 sciaga
eko KOLOKWIUM 1 i 2 ściąga
Kolokwium 1 - Ściąga 1, Wszystkie światłowody nawet jednomodowe nie są idealnym medium transmisyjnym
Fizjologia - kolokwium - ściąga, UJK.Fizjoterapia, - Notatki - Rok I -, Fizjologia, Zaliczenia i ści
Semestr I - Kolokwium I - ściąga, UJK.Fizjoterapia, - Notatki - Rok I -, Biofizyka, Materiały na zal
społeczna kolokwium sciaga, PEDAGOGIKA UwB, pedagogika społeczna
Kolokwium - ŚCIĄGA - 8-10.04.2011, UJK.Fizjoterapia, - Notatki - Rok I -, Biofizyka, Materiały na za
Wszystkie tematy - kolokwium ściąga, Studia Pwr, Semestr 1, Psychologia (wykład)
Gajek-kolokwium-ściaga, Pedagogika studia magisterskie, zintegrowany paradygmat analizy działania w
technologia transportu kolokwium sciaga
hotele kolokwium ściąga mini
Kolokwium ściąga
kolokwium 1 sciaga !!, POLITECHNIKA (Łódzka), Metrologia, 1semestr
Fizyka kolokwium ściąga
Kolokwium 1 Ściąga 2
Zagadnienia na kolokwium ściąga
więcej podobnych podstron