Konspekt: Sprzęgła i przekładnie hydrokinetyczne
1
Sprzęgła i przekładnie hydrokinetyczne
1. Napędy jazdy ciągników i samojezdnych maszyn roboczych
Układ przenoszący energię z wału silnika na elementy jezdne maszyny nazywa się napędem jazdy. W
samojezdnych maszynach roboczych stosuje się do napędu najczęściej silniki spalinowe wysokoprężne,
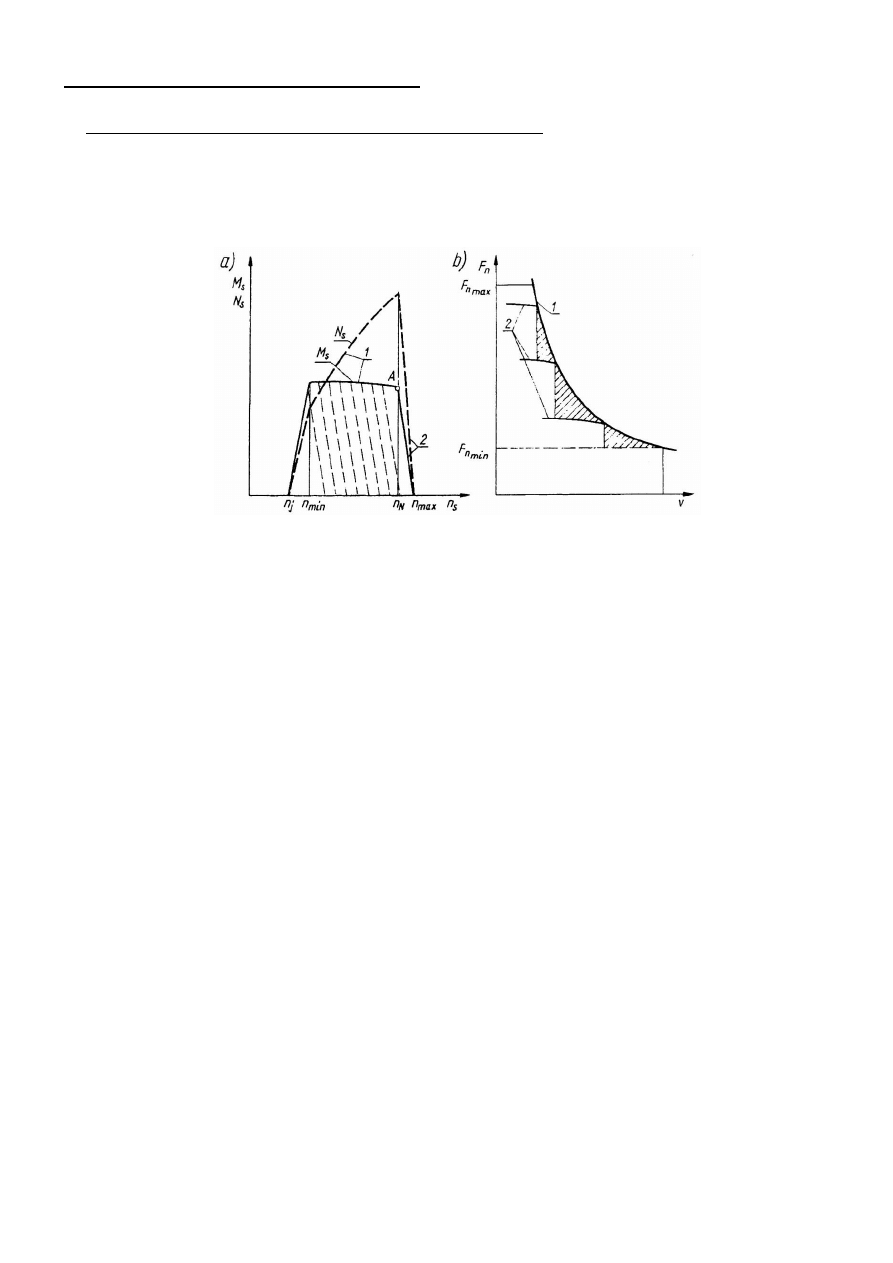
których charakterystykę zewnętrzną przedstawiono na rys. 1.
Dla współczesnych silników obroty odpowiadające maksymalnej mocy wynoszą n
Ν
=2000-
2600obr./min, a obroty maksymalne jego pracy n
max
=1.1n
N
, obroty n
min
=(0.33-0.4)n
N
oraz obroty biegu jałowego około 450-600 obr./min..
Na rysunku 1b przedstawiono przebieg maksymalnej siły napędowej na kołach jezdnych przy
różnych prędkościach jazdy. Dla wykorzystania pełnej mocy silnika przy różnych prędkościach jazdy, należy
w układ napędowy zamontować przekładnię bezstopniową. Stąd wykres F
n
=f(v), przy pominięciu strat,
przedstawia hiperbolę. Jest ona od góry ograniczona siłą Fn
max
(wynikającą z przyczepności), powyżej
której zaczyna się całkowity poślizg względem podłoża i od dołu siłą Fn
min
, która nie wystarcza już na
pokonanie oporów jazdy i ruch pojazdu ustaje.
Przy zastosowaniu przekładni stopniowej np. o 3 przełożeniach (pomijając również straty), pełna moc
silnika na każdym z przełożeń może być wykorzystana tylko przy jednej określonej prędkości jazdy. Pola
zakreskowane na rysunku 1b przedstawiają zakresy niewykorzystanej mocy silnika. Dla wykorzystania
pełnej mocy silnika przy różnych prędkościach jazdy i przy różnych obciążeniach napęd musi mieć
odpowiednią ilość przełożeń (biegów) oraz określoną rozpiętość przełożeń. Rozpiętością przełożenia
dynamicznego i
rd
nazywa się stosunek największego momentu do najmniejszego momentu na wale
wyjściowym przy nominalnym momencie na wale wejściowym:
i
rd
= M
2max
/M
2min
, M
1nom
= const.
I odpowiednio rozpiętość przełożeń kinematycznych:
i
rk
= n
2max
/n
2min
przy n
1nom
=const.
Ciągniki rolnicze i samojezdne maszyny robocze wymagają różnych rozpiętości przełożeń. Ich układ
napędowy powinien ponadto umożliwić:
- długotrwałe rozłączenie napędu od silnika spalinowego,
- jazdę do tyłu,
- hamowanie silnikiem,
- zapewnienie płynnego rozbiegu,
- łatwe sterowanie ruchem maszyny.
Rys.1 Napęd silnikiem spalinowym z regulatorem wielozakresowym: a) charakterystyka szybkościowa
silnika; N
s
- moc na wale silnika, M
s
- moment na wale silnika, n
s
- prędkość obrotowa wału silnika; b) wykres
siły napędowej F
n
w funkcji prędkości pojazdu v, 1- przekładnia bezstopniowa bez strat, 2- trzystopniowa
skrzynia biegów bez strat
Konspekt: Sprzęgła i przekładnie hydrokinetyczne
2
1.1 Zasadnicze parametry ruchu obrotowego
Napęd charakteryzują następujące parametry: sprawność, przełożenie dynamiczne i kinematyczne.
Sprawność napędu jest to stosunek mocy N
2
otrzymywanej z napędu do mocy N
1
doprowadzonej do napędu:
η = N
2
/N
1
.
Ruch obrotowy wału charakteryzuje się dwoma parametrami: momentem obrotowym i prędkością
kątową. Parametry te najczęściej ulegają zmianie i zmiany te określane są przez przełożenie dynamiczne i
kinematyczne.
Przełożenie dynamiczne i
d
jest to stosunek momentu M
2
na wale wyjściowym do momentu M
1
doprowadzonego na wał wejściowy
1
2
M
M
i
d
=
.
Przełożenie kinematyczne i
k
określa stosunek prędkości kątowej ω
2
wału wyjściowego napędu do
prędkości kątowej ω
1
wału wejściowego
1
2
ϖ
ϖ
=
k
i
.
Ta definicja przełożenia kinematycznego jest odwrotna niż podawana w literaturze z podstaw konstrukcji
maszyn i należy przy analizowaniu charakterystyk napędowych zwracać uwagę na definicję tego przełożenia.
W napędach używa się często pojęcia poślizgu względnego s, zdefiniowanego następująco:
s= (ω
1
-ω
2
)/ω
1
albo s = 1- i
k
.
Sprawność całkowitą można również zapisać jako:
η = N
2
/N
1
= (M
2
*ω
2
)/(M
1
*ω
1
) = i
d
* i
k
.
1.2 Urządzenia hydrauliczne stosowane w napędach jazdy
Do urządzeń tych
zaliczamy:
- hydraulicznie sterowane sprzęgła i hamulce,
- sprzęgła i przekładnie hydrokinetyczne, zwalniacze (hamowanie hydrokinetyczne),
- przekładnie hydrostatyczne.
Z hydraulicznym sterowaniem sprzęgieł i hamulców można było się zapoznać na wykładach z
przedmiotu „Podstawy konstrukcji maszyn” i w tym opracowaniu nie będzie to zagadnienie omawiane.
2. Sprzęgła hydrokinetyczne
Sprzęgła i przekładnie hydrokinetyczne wykorzystują do przenoszenia ruchu energię kinetyczną cieczy.
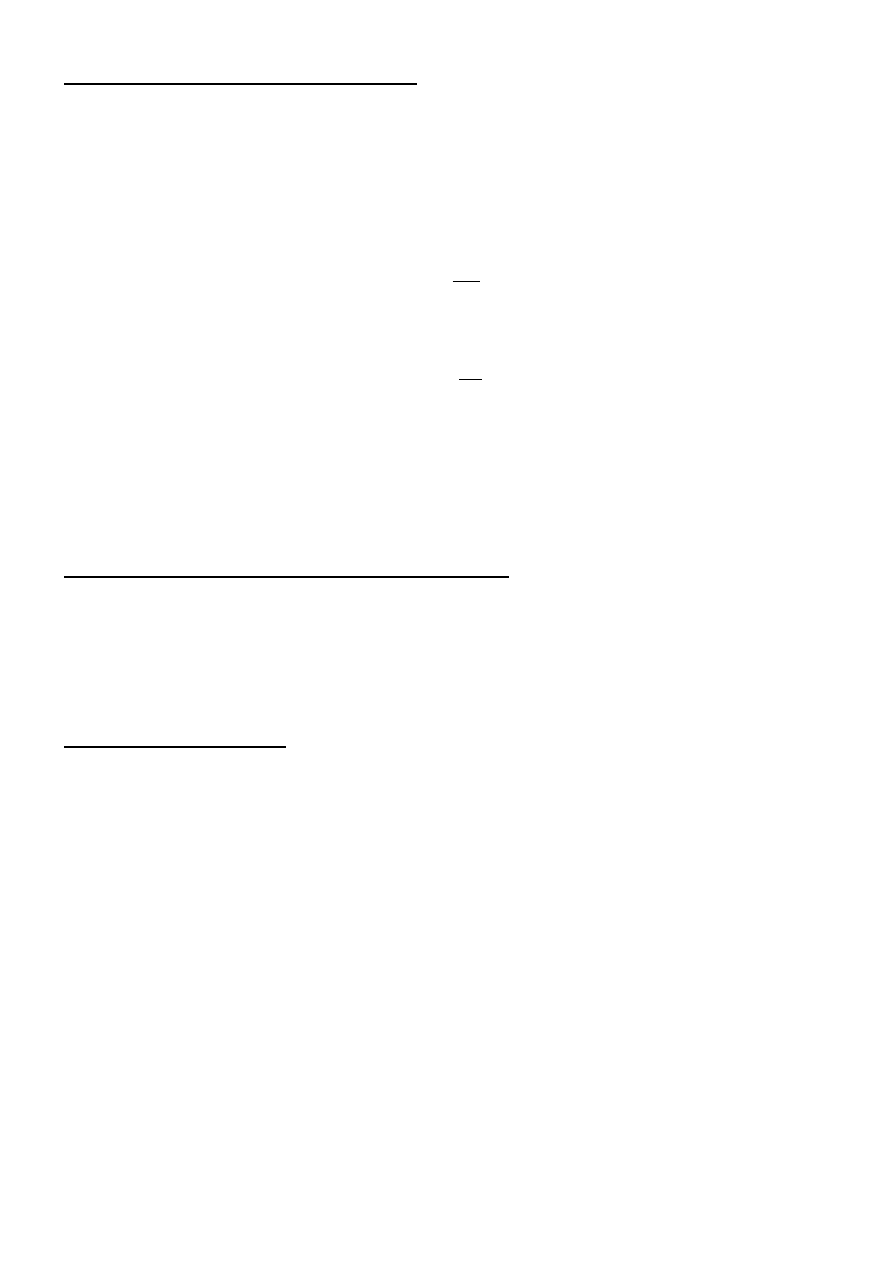
Sprzęgło hydrokinetyczne (rys.2) składa się z trzech elementów: wirnika pompy, wirnika turbiny i obudowy.
Wirniki wykonane są w postaci czasz wyposażonych w szereg promieniowych łopatek. Wirnik pompy
połączony jest z wałem wejściowym a wirnik turbiny z wałem wyjściowym. Obudowa, w której
zamontowane są wirniki, stanowi najczęściej hermetycznie zamknięty zbiornik napełniony w 85-90% cieczą
(np. olejem turbinowym).
Zasada pracy sprzęgła jest następująca. Obracający się wirnik pompy wprawia cząsteczki cieczy
znajdujące się w kanałach w ruch wirowy dookoła osi obrotu wirnika. Pod wpływem powstających przy
ruchu obrotowym sił odśrodkowych działających na cząsteczki cieczy powstaje przepływ cieczy w kierunku
od środka do zewnątrz. Przy przepływie cieczy przez kanały międzyłopatkowe obracającego się wirnika
pompy w kierunku coraz większej średnicy, następuje przyspieszenie cząstek cieczy w kierunku
obwodowym i zwiększenie ich prędkości obwodowej. Jest to równoznaczne ze zwiększeniem energii
kinetycznej przepływającej cieczy. Wychodzący z dużą prędkością z wirnika pompy strumień cieczy wpada
do wirnika turbiny. Tu przepływając wzdłuż kanałów międzyłopatkowych w kierunku coraz mniejszej
średnicy, cząsteczki zmniejszają swoją prędkość. Wiąże się to ze zmniejszeniem energii kinetycznej cieczy i
powstawaniem reakcji strumienia na łopatki wirnika turbiny (siły Coriolisa). Siły reakcji strumienia
powodują obracanie się wirnika turbiny w kierunku zgodnym z kierunkiem obracania się wirnika pompy.
Wypływający z wirnika turbiny strumień cieczy wpada ponownie do wirnika pompy i w ten sposób obieg
cieczy między wirnikami odbywa się w sposób ciągły.
Konspekt: Sprzęgła i przekładnie hydrokinetyczne
3
Moment obrotowy w sprzęgle hydrokinetycznym przenoszony jest dwoma drogami:
- drogą hydrauliczną (za pomocą cieczy wypełniającej sprzęgło)- moment M
h
- oraz drogą mechaniczną za pomocą momentów tarcia w łożyskach i w uszczelnieniach - moment M
m
(stanowi bardzo małą część momentu całkowitego).
Moment obrotowy przenoszony przez ciecz składa się z dwóch części:
- dzięki wykorzystaniu zmian energii kinetycznej cieczy krążącej między wirnikami, przy czym przyrost tej
energii odbywa się w wirniku pompy, a ubytek w wirniku turbiny,
- dzięki tarciu między cząsteczkami cieczy (naprężenia styczne w cieczy) związanych z wałem wejściowym
i wałem wyjściowym. Przez naprężenia styczne w cieczy przenoszone jest około 5% momentu całkowitego i
to przy i
k
≈ 0.
Zasadnicza część momentu obrotowego przenoszona jest dzięki energii kinetycznej cieczy. Dzieli się ona na
dwie części, a mianowicie na:
- moment akcyjny związany ze zmianą ilości ruchu masy cieczy przy wlocie do wirnika turbiny oraz
- moment reakcyjny (powstaje w wirniku turbiny wskutek zmian ilości ruchu masy cieczy przepływającej w
kanałach wirnika).
Rys. 2 Sprzęgło hydrokinetyczne: 1 – wirnik pompy, 2 – wirnik turbiny, 3 – obudowa, 4 – wał wyjściowy, 6 –
łopatki, 7 – łożysko wału wejściowego, 8 – łożysko wału wyjściowego, 9 i 10 – łożyska wewnętrzne sprzęgła, 11 -
uszczelnienie
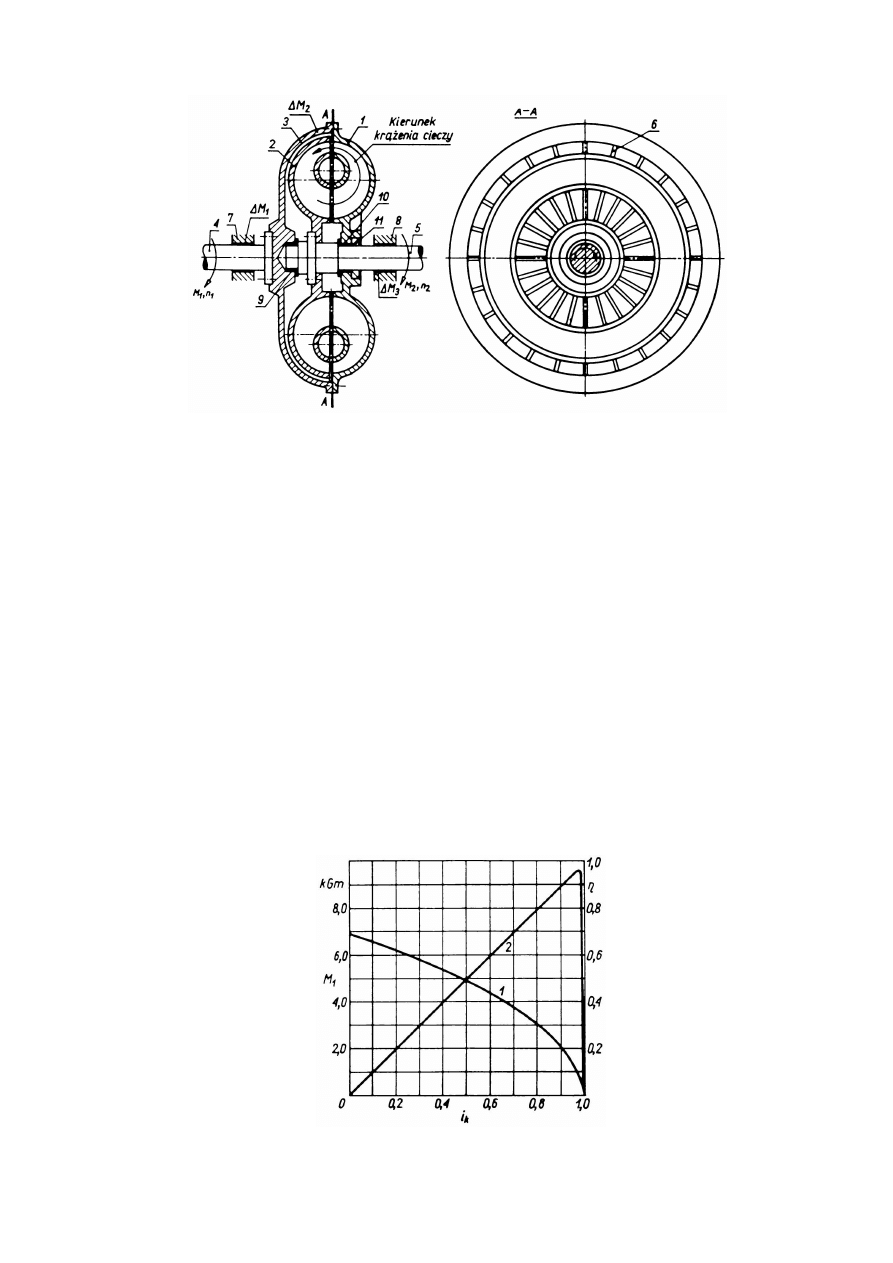
Rys. 3 Charakterystyka sprzęgła hydrokinetycznego przy stałej prędkości obrotowej wirnika pompy: 1 – moment
przenoszony przez sprzęgło, 2 – sprawność sprzęgła
Konspekt: Sprzęgła i przekładnie hydrokinetyczne
4
Jeśli pominąć niewielkie momenty tarcia osłony sprzęgła o otaczające powietrze i straty tarcia w łożyskach
zewnętrznych to moment M
1
=M
2
, a stąd przełożenie dynamiczne sprzęgła jest równe i
d
=1. Natomiast
przełożenie kinematyczne i
k
nie jest równe jedności i w dodatku jest zmienne w zależności od warunków
obciążenia sprzęgła.
Od szybkości krążenia cieczy między wirnikami zależy wielkość reakcji wywieranych przez strumień
na łopatki wirników. Im szybkość ta jest większa, tym większe są i reakcje, a zatem i momenty przenoszone
przez sprzęgło.
Jak stąd wynika wielkość momentu przenoszonego przez sprzęgło zależy zarówno od prędkości obrotowej
wirnika pompy, jak i od stosunku prędkości obrotowych obu wirników, czyli od przełożenia kinematycznego
i
k
. Charakterystykę pracy sprzęgła hydrokinetycznego przedstawiono na rysunku 3.
Moment przenoszony przez sprzęgło można opisać wzorem:
M = f
M
*n
1
2
*D
5
,
gdzie: f
M
= f(i
k
) współczynnik momentu (z teorii podobieństwa sprzęgieł),
n
1
- prędkość obrotowa wirnika pompy,
D - średnica nominalna sprzęgła.
Charakterystyka sprzęgła oraz wartość f
M
zależą od kształtu wirników, stosunków wymiarowych, liczby
łopatek oraz od rodzaju cieczy (gęstości i lepkości). Moment maksymalny sprzęgła można podczas
eksploatacji zmienić przez zmianę stopnia napełnienia olejem jego obudowy.
Podsumowując należy podkreślić, że sprzęgła hydrokinetyczne nie dają zmiany momentu obrotowego
przy przenoszeniu ruchu, tzn. ich przełożenie dynamiczne i
d
≈ 1, natomiast pracują ze zmiennym, zależnym
od warunków obciążenia przełożeniem kinematycznym i
k
.
2.1 Zalety sprzęgieł hydrokinetycznych:
- płynne ruszanie i płynny rozbieg pod obciążeniem,
- możliwość uzyskania dużego momentu obrotowego na wale wyjściowym przy ruszaniu,
- możliwość zatrzymania wału wyjściowego przy pracującym na maksymalnych obrotach silniku bez
konieczności jego odłączania,
- łatwość i szeroki zakres regulacji momentu obrotowego i prędkości obrotowej na wale wyjściowym
przez operowanie pedałem gazu silnika bez obawy jego zatrzymania,
- zmniejszenie drgań skrętnych i nagłych zmian obciążenia przy przenoszeniu momentu
obrotowego
w obu kierunkach.
2.2 Wady:
- obniżenie mocy maksymalnej na wale wyjściowym w stosunku do mocy silnika,
- pogorszenie wskaźników ekonomicznych (większe zużycie paliwa),
- niska sprawność i duże straty mocy w sprzęgle przy małych przełożeniach kinematycznych i pracy z
pełnym obciążeniem,
- pogorszenie hamowania silnikiem.
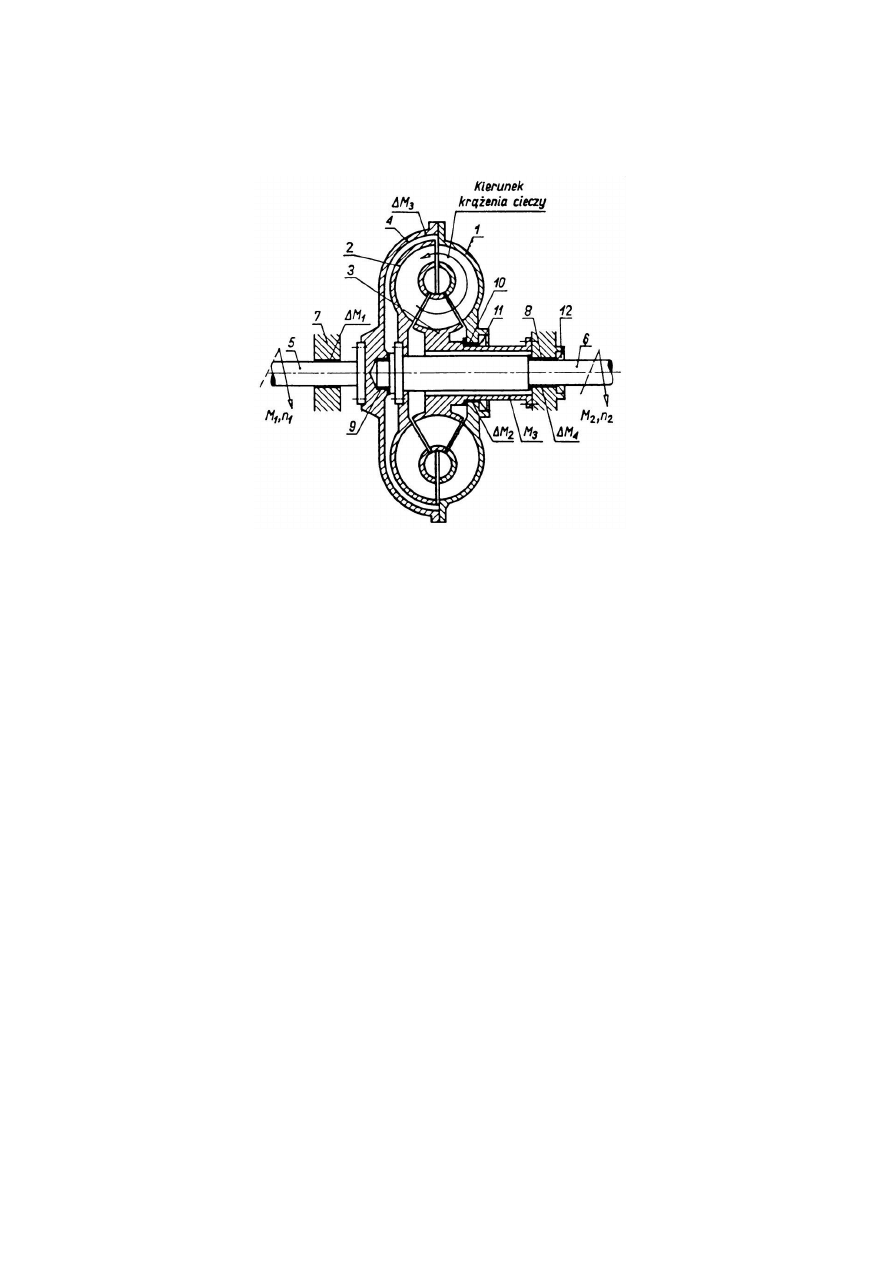
3. Przekładnie hydrokinetyczna
Przekładnia hydrokinetyczna podobna jest w budowie do sprzęgła hydrokinetycznego. Różni się od
niego tym, że posiada trzeci wirnik (najczęściej nieruchomy) zwany wirnikiem kierownicy (rys.4).
Obieg cieczy w przekładni odbywa się na tej samej zasadzie jak w sprzęgle. Zadaniem nieruchomego
wirnika kierownicy jest wywołanie odpowiednio skierowanego momentu reakcyjnego przez zmianę
kierunku przepływającej cieczy.
Konspekt: Sprzęgła i przekładnie hydrokinetyczne
5
Pomijając niewielkie momenty tarcia obudowy przekładni o otaczające powietrze i momenty tarcia
w łożyskach i uszczelnieniach, można napisać dla przekładni następujące równanie momentów:
M
1
- M
2
+M
3
= 0 , stąd: M
2
=M
1
+M
3
.
Przełożenie dynamiczne:
i
d
= M
2
/M
1
= (M
1
+ M
3
)/ M
1
= 1+ M
3
/M
1
.
Zatem przekładnia hydrokinetyczna przy przenoszeniu ruchu obrotowego powoduje zmianę momentu
obrotowego, jeśli tylko moment na kierownicy M
3
≠ 0. W przypadku kiedy moment na kierownicy M
3
będzie miał kierunek zgodny z kierunkiem momentu M
1
, wówczas i
d
>1. Natomiast, jeśli moment M
3
będzie
miał kierunek przeciwny do M
1
to i
d
<1. Widać więc, że przekładnia hydrokinetyczna zwiększa znacznie
moment obrotowy na wale wyjściowym w stosunku do momentu na wale wejściowym.
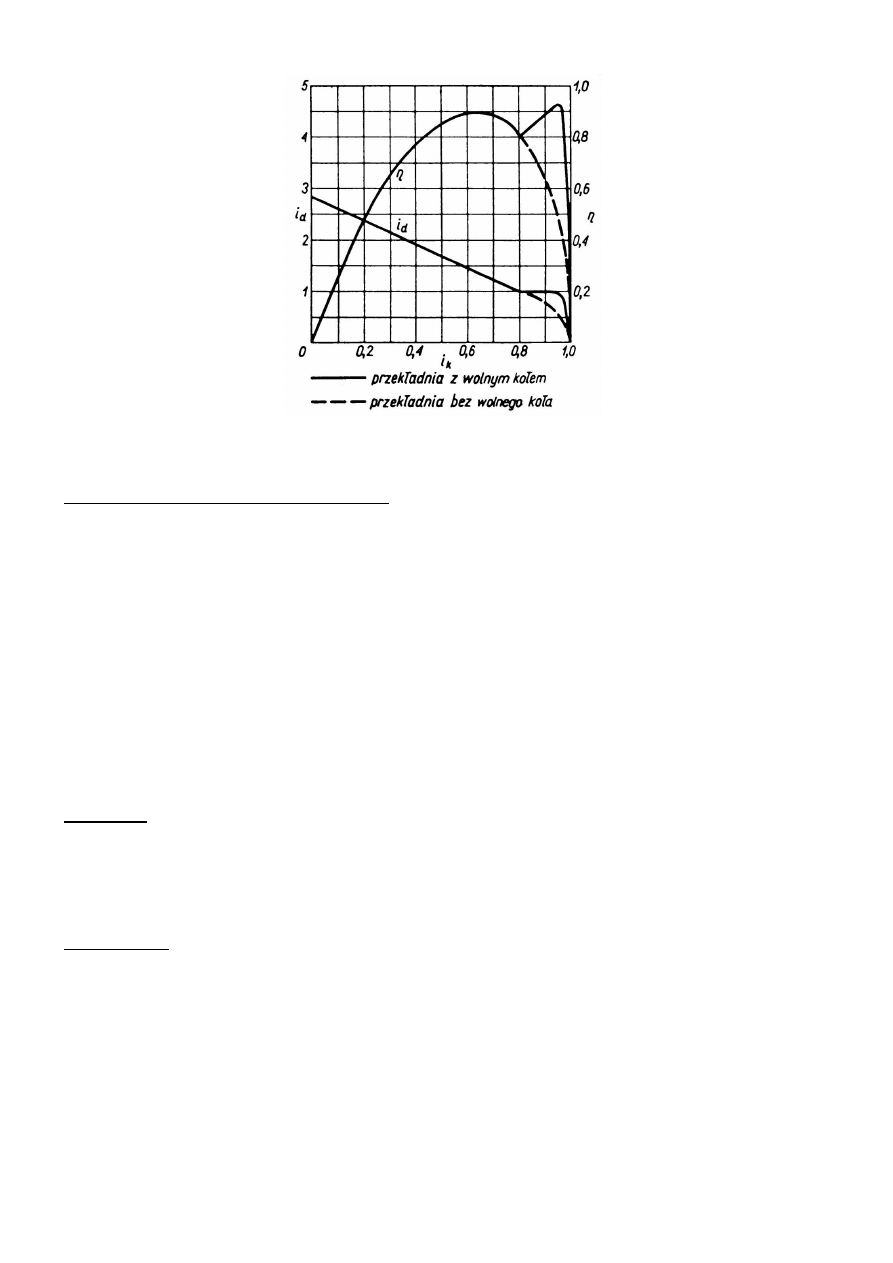
Przekładnie hydrokinetyczne można podzielić na:
- jednozakresowe, w których wirnik kierownicy jest unieruchomiony na stałe. Przy wzroście przełożenia
kinematycznego moment reakcyjny M
3
najpierw spada do zera a następnie osiąga
wartość ujemną, co
daje przełożenie dynamiczne poniżej jedności. Jest to niekorzystne.,
- dwuzakresowe, mogące pracować w zakresie charakterystyki przekładni i charakterystyki sprzęgła
hydrokinetycznego. Wirnik kierownicy tych przekładni osadzony jest na wale za pomocą wolnego koła.
Dzięki temu kierownica może przenosić jedynie moment reakcyjny o takim kierunku, który powoduje
zwiększenie momentu na wirniku turbiny. Po przekroczeniu punktu sprzęgnięcia, gdy moment na wirniku
kierownicy zmienia kierunek, wirnik ten zaczyna się swobodnie obracać na wolnym kole i przekładnia
pracuje wtedy jak sprzęgło hydrokinetyczne.
Charakterystyki tych przekładni przedstawiono na rysunku 4a.
Przekładnie można również podzielić na:
- przekładnie o stałej charakterystyce, których charakterystyki nie można zmieniać w czasie pracy,
- przekładnie o regulowanej (zmiennej) charakterystyce. Najczęściej charakterystykę zmienia
się
przez zmianę ustawienia łopatek wirników w czasie pracy za pomocą dźwigni (sprzęgła
zmieniają
charakterystykę przez zmianę stopnia napełnienia obudowy cieczą).
Przekładnie hydrokinetyczne należą więc do przekładni o ciągłej i samoczynnej zmianie przełożenia
dynamicznego, przy czym przełożenie to zmienia się w funkcji przełożenia kinematycznego. Praktycznie
daje to wzrost przełożenia dynamicznego przekładni w miarę wzrostu obciążenia.
Rys. 4 Przekładnia hydrokinetyczna: 1 – wirnik pompy, 2 – wirnik turbiny, 3 – wirnik kierownicy, 4 – obudowa, 5
– wał wejściowy, 6 – wał wyjściowy, 7, 8, 9, 10 – łożyska, 11, 12 - uszczelnienia
Konspekt: Sprzęgła i przekładnie hydrokinetyczne
6
Rys.4a Charakterystyka sprawnościowa i przełożenie dynamiczne przekładni hydrokinetycznej w funkcji przełożenia
kinematycznego
3.1 Zalety przekładni hydrokinetycznych:
- możliwość uzyskania na wale wyjściowym przy ruszaniu z miejsca maksymalnego momentu
obrotowego silnika, pomnożonemu dodatkowo przez przełożenie dynamiczne przekładni,
- płynne ruszanie i płynny rozbieg pod obciążeniem,
- łatwość dostosowywania się przekładni hydrokinetycznej do zwiększonych obciążeń zarówno przy
ruszaniu z miejsca i rozbiegu, jak i w czasie normalnej pracy, bez obawy przeciążenia silnika (dzieje się to
dzięki ciągłej, bezstopniowej zmianie przełożenia dynamicznego przekładni, zachodzącego samoczynnie w
zależności od obciążenia wału wyjściowego),
- możliwość zatrzymania wału wyjściowego przy pracującym silniku bez konieczności
rozłączania
napędu, a także możliwość uruchamiania silnika przy zatrzymanym wale,
- łatwość i szeroki zakres regulacji momentu obrotowego
i prędkości obrotowej przez proste operowanie
pedałem gazu silnika,
- zmniejszenie drgań skrętnych i nagłych zmian obciążenia przy przenoszeniu momentu obrotowego
zarówno z wału silnika na koła, jak i na odwrót.
3.2 Wady:
- obniżenie mocy maksymalnej na wale wyjściowym w stosunku do mocy maksymalnej
silnika,
- pogorszenie wskaźników ekonomicznych (zwiększone zużycie paliwa przez silnik),
- pogorszenie warunków hamowania silnikiem.
4. Zwalniacze
Zwalniacze zbudowane są podobnie jak sprzęgła hydrokinetyczne z tym, że wirnik turbiny jest
nieruchomy i na nim wytracana jest energia hamowania pojazdu. Podgrzany olej w procesie hamowania jest
schładzany w chłodnicy zwalniacza. Zwalniacze mogą być zabudowane bezpośrednio w skrzyniach biegów
pojazdów lub jako oddzielne podzespoły w układzie napędowym. Wydłużają one trwałość hamulcy
ciernych, które pracują tylko w końcowym procesie hamowania (prędkość pojazdu odpowiada prędkości
pieszego) lub przy gwałtownym hamowaniu awaryjnym. Zwalniacze mogą być załączone lub wyłączone z
pracy. Główne zastosowania zwalniaczy to: autobusy miejskie, pojazdy ciężarowe poruszające się w
terenach górzystych, lokomotywy spalinowe napędzające kolejki podmiejskie.
Wyszukiwarka
Podobne podstrony:
Kon. - zbicie po pros. i przek. - siata, AWF, Konspekty, Siatkówka
Ekonomia konspekt1
BLS 2010 stom [konspekt]ppt
Ekonomia konspekt6
22 Choroby wlosow KONSPEKTid 29485 ppt
konspekt dzieci , ćwicz
farmakoterapia w als, konspekt+RKO2011 farmakoterapia+[CPR+EU]
Ekonomia konspekt9
RKO farmakoterapia [konspekt
Ekonomia konspekt14
metodologia badan politologicznych konspekt
Konspekt; odejmowanie liczb wymiernych
0 konspekt wykladu PETid 1826 Nieznany
Konspekt projektu I część 2013
więcej podobnych podstron