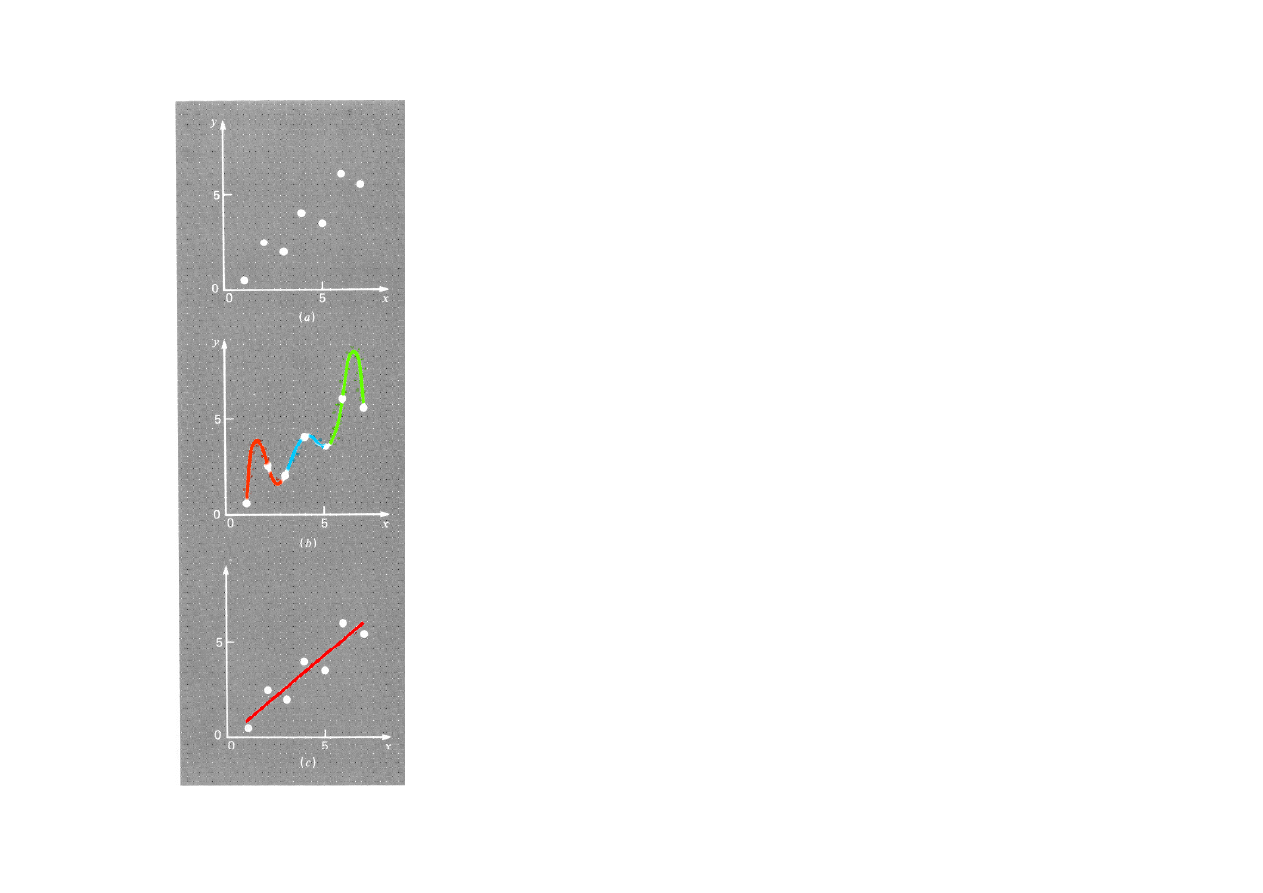
Punkty pomiarowe
Interpolacja
p
j
‐ kilka funkcji przybliżających
‐ funkcje przechodzą przez wszystkie punkty pomiarowe
‐ niewielka liczba punktów pomiarowych
Aproksymacja
‐ jedna funkcja przybliżająca
funkcja przechodzi tak aby błąd przybliżenia punktów
‐ funkcja przechodzi tak aby błąd przybliżenia punktów
pomiarowych był jak najmniejszy
‐ znaczna liczba punktów pomiarowych
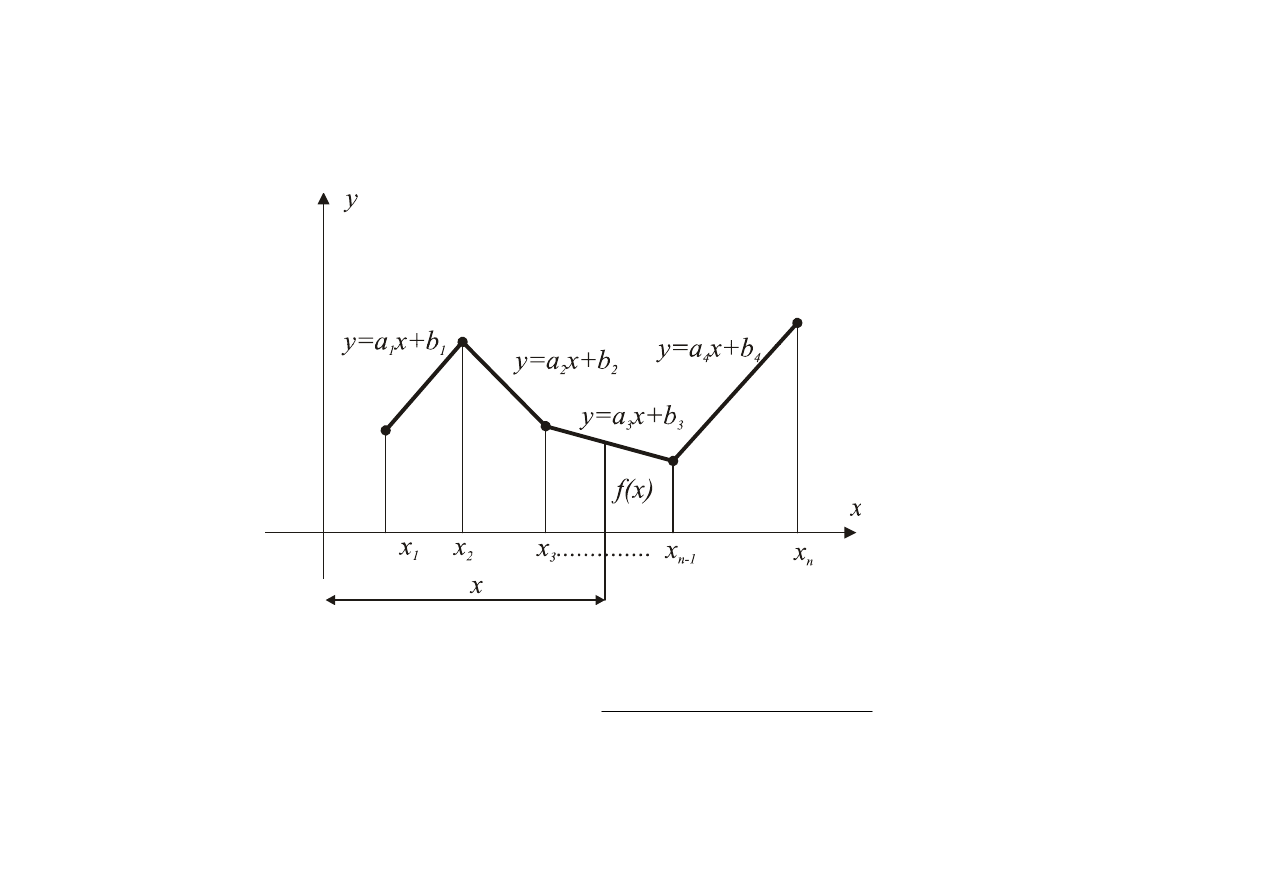
Interpolacja liniowa
1
1
1
1
n
n
n
n
f x
f x
f x
f x
x x
x
x
1
n
n
x
x
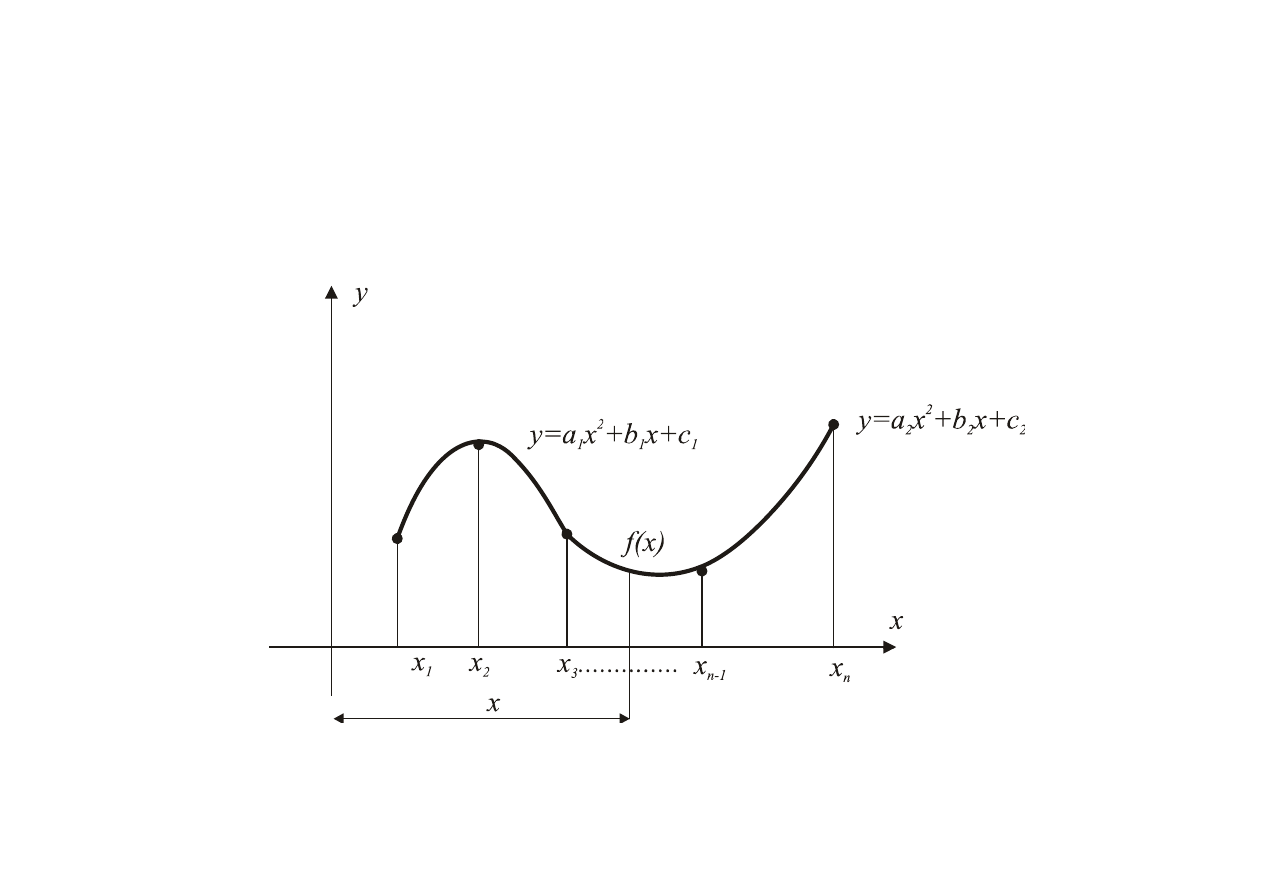
Interpolacja kwadratowa

f
b
b
b
0
1
1
2
1
n
n
n
f x
b
b x x
b x x
x x
0
1
n
b
f x
1
n
n
f x
f x
b
1
1
n
n
b
x
x
1
1
n
n
n
n
f x
f x
f x
f x
1
1
2
1
1
n
n
n
n
n
n
x
x
x
x
b
x
x

2
0
1
2
f x
a
a x a x
0
1
2
f x
a
a x a x
0
0
1
1
2
1
n
n
n
a
b
b x
b x x
1
1
2
1
2
n
n
a
b
b x
b x
2
2
a
b

Interpolacja wielomianowa dowolnego stopnia n
0
1
0
0
1
1
n
n
f x
b
b x x
b x x
x x
x x
0
0
b
f x
0
0
f
1
1
0
,
b
f x x
2
2
1
0
, ,
b
f x x x
1
1
0
,
,
, ,
n
n
n
b
f x x
x x
f x
f x
,
i
j
i
j
i
j
f x
f x
f x x
x
x
,
,
,
,
i
j
j
k
i
j
k
f x x
f x x
f x x x
i
j
k
i
k
f
x
x
1
1
1
2
0
,
,
,
,
,
,
n
n
n
n
f x x
x
f x
x
x
f x x
x x
1
1
0
0
,
,
,
n
n
n
f x x
x x
x
x

Metoda kolokacji
Niech wartości funkcji będą dane w punktach
Szukamy funkcji
w postaci kombinacji liniowej
1
2
,
,
,
n
y y
y
1
2
,
,
,
n
x x
x
y
f x
Szukamy funkcji w postaci kombinacji liniowej
y
f x
y a f x
a f x
a f x
1 1
2
2
n n
y a f x
a f x
a f x
Funkcje
są z góry założone
i
f x
Funkcje są z góry założone
i
f x
Kolokacja wielomianowa
1
1, 2,
,
i
i
f x
x
i
n
Kolokacja szeregami Czebyszewa
1
1, 2,
,
i
i
f x
T
x
i
n
1
2
cos
1 arccos
i
x g d
T
x
i
d
x g
d
1
i
g
g d
0
1
T x
0
1
T x
2x
g d
T
1
g
T x
g d
Wzór rekurencyjny
Wzór rekurencyjny
1
1
1
2
k
k
k
T
x
T x T x
T
x
Kolokacja szeregami Fouriera
2
1
cos
1
0 1
k
f
x
kx
k
n
2
0, 1,
,
2
sin
k
k
n
f
kx
Rozwiązanie
1 1
2
2
n n
y a f x
a f x
a f x
1 1
2
2
n n
y
f
f
f
1 2
y
a f x
a f x
a f x
i
n
1 1
2
2
1, 2,
,
i
i
i
n n
i
y
a f x
a f x
a f x
i
n
Powstaje układ równań ze względu na parametry
i
a
j
g ę
p
y
i

Dla funkcji wielu zmiennych
1 1
1
2
2
2
1
2
,
,
,
,
,
,
i
n
n
y
a f x x
x
a f x x
x
1
2
,
,
,
1 2
n n
n
a f x x
x
i
1, 2,
,
i
n

A
k
j
Aproksymacja
Sposoby aproksymacja ze względu na sposób liczenia błędu
y a
a x e
e y a
a x
0
1
0
1
y a
a x e
e y a
a x
Minimum sumy błędów
n
n
0
1
1
1
i
i
i
i
i
e
y
a
a x
Minimum sumy wartości bezwzględnych błędów
0
1
n
n
i
i
i
e
y
a
a x
0
1
1
1
i
i
i
i
i
e
y
a
a x
Kryterium „minimax” –minimum największego błędu
1
2
min(max( ,
,
,
))
n
e e
e
Minimum sumy kwadratów – metoda najmniejszych kwadratów
2
2
n
n
S
2
2
0
1
1
1
r
i
i
i
i
i
S
e
y
a
a x

Metoda najmniejszych kwadratów – opis ogólny
Wartości funkcji dane są w punktach
Szukamy funkcji jako kombinacji liniowej pewnych funkcji
1
2
,
,
,
n
y y
y
1
2
,
,
,
n
x x
x
Szukamy funkcji jako kombinacji liniowej pewnych funkcji
1 1
2 2
l l
y a f x
a f x
a f x
Znanych funkcji
1
2
,
,
,
l
f x
f x
f x
Różnica:
l
n
Błąd i‐tego równania
1 1
2 2
i
i
i
i
l l
i
y
y
a f x
a f x
a f x
współczynniki dobieram tak, aby błąd był najmniejszy
i
a
p
y
,
y
ą
y
j
j y
i

2
2
2
1
1
1
min
n
n
l
r
i
i
k k
i
i
i
k
S
y
y
a f x
1
1
1
i
i
k
1
1
2
0
1, 2,
,
n
l
r
i
k k
i
j
i
i
k
j
S
y
a f x
f x
j
l
a
1
1
i
k
j

P
t j
kł d l ó
ń l i
i d
i
Powstaje układ l równań z l niewiadomymi
1
1 2
l
jk k
j l
c a
c
j
l
, 1
1
1, 2,
,
jk k
j l
k
c a
c
j
l
n
1
n
jk
kj
k
i
j
i
i
c
c
f x f x
, 1
1
,
1, 2,
,
n
j l
i
j
i
i
c
y f x
k j
l
i
Kontrola błędu
Wariancja
2
, 1
n
l
t
i
k k l
S
y
a c
Odchylenie standardowe
,
1
1
i
k
Odchylenie standardowe
y
t
s
S
n l

Metoda najmniejszych kwadratów (regresja lub aproksymacja liniowa)
0
1
0
1
y a
a x e
e y a
a x
2
2
0
1
1
1
n
n
r
i
i
i
i
i
S
e
y
a
a x
0
1
0
2
0
r
i
i
S
y
a
a x
a
0
1
1
2
0
r
i
i
i
S
y
a
a x x
a
0
1
2
0
0
i
i
y
a
a x
2
0
1
0
0
0
i i
i
i
y x
a x
a x
a
na
0
1
i
i
na
x a
y
2
0
1
i
i
i i
x a
x a
x y

Rozwiązanie
1
2
2
i
i
i
n
x y
x
y
a
2
2
1
1
0
1
i
i
i
i
n
n
n
x
x
a
y a x
y
y
x
x
n
n
Statystyczna ocena rozwiązania
wartość średnia i i kwadrat odchyleń
2
1
i
t
i
n
y
y
S
y
y
odchylenie standardowe i wariancja
y
j
2
1
1
t
t
y
y
S
S
s
s
n
n
1
1
n
n
współczynnik wariacji
100%
y
s
c. v.
100%
y
y
standardowy błąd przybliżenia (
), współczynnik determinacji (r
2
),
/
y x
s
współczynnik korelacji (r)
2
1
t
r
r
S
S
S
i
i d kł d
y
2
/
1
2
t
r
r
y x
t
s
r
r
rozwiązanie dokładne
n
S
Rozwiązanie poprawne gdy
/
y x
y
s
s
Wyszukiwarka
Podobne podstrony:
prezentacja 3 2 id 390139 Nieznany
PrezentacjaEV id 391923 Nieznany
angielski prezentacja id 64318 Nieznany (2)
Alginian do prezentacji id 5743 Nieznany (2)
prezentacja 2 id 195168 Nieznany
HIE Prezentacje id 201217 Nieznany
prezentacja 5 id 390176 Nieznany
prezentacja 3 id 390136 Nieznany
2ZF Prezentacja1 id 32810 Nieznany (2)
kalman filter prezentacja id 23 Nieznany
panele v1 prezentacja id 348812 Nieznany
Prezentacja 1 id 391482 Nieznany
prezentacja 4 id 389780 Nieznany
Prezentacja Prezentacja id 6782 Nieznany
EKONOMETRIA1 prezentacja id 155 Nieznany
Omowienie prezentacji id 335264 Nieznany
IKE vs IKZE prezentacja id 2106 Nieznany
więcej podobnych podstron