Politechnika Łódzka, ul. Żeromskiego 116, 90-924 Łódź, tel. (042) 631 28 83
www.kapitalludzki.p.lodz.pl
„Innowacyjna dydaktyka bez ograniczeń - zintegrowany
rozwój Politechniki Łódzkiej - zarządzanie Uczelnią,
nowoczesna oferta edukacyjna i wzmacniania zdolności
do zatrudniania osób niepełnosprawnych”
Prezentacja multimedialna współfinansowana przez
Unię Europejską w ramach
Europejskiego Funduszu Społecznego w projekcie pt.
„SIGNAL PROCESSING”
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
2
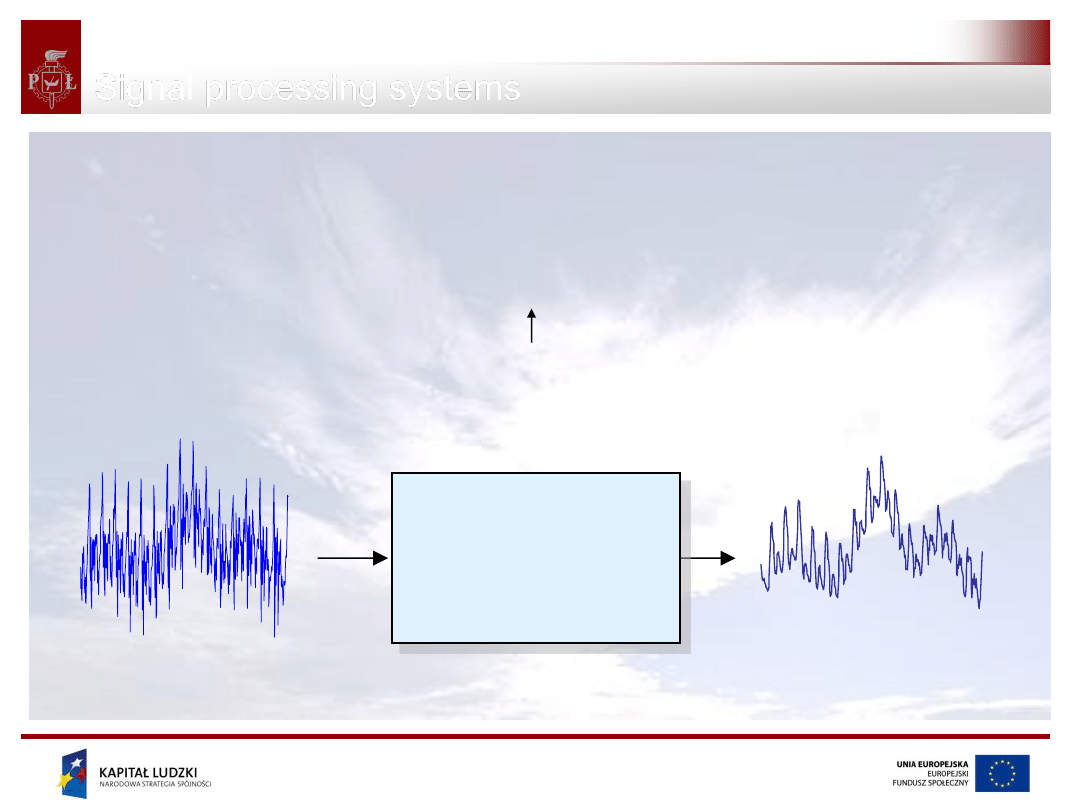
Signal
Processing
system
x(t)
y(t)
?
x(t) y(t)
Signal processing systems
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
3
t
– continuous time variable
Continuous time
system
x(t)
y(t)
eg. megaphone -
analog amplifier
Continuous
signal
y(t)=H(x(t))
Signal processing systems
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
4
n
– discrete time variable n = 0, 1, … N,…
eg. reverberation
(echo) model:
y(n)=0.1*y(n-1) +x(n),
Digital filters
Discrete
time signal
Discrete time
system
x(n)
y(n)
y(n)=H(x(n))
Signal processing systems
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
5
1.
With and without memory
2.
Invertible and non-invertible
3.
Causal and non-causal
4.
Stable and unstable*
5.
Linear and nonlinear
6.
Time-invariant and time-variant
Signal processing systems - properties
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
6
n
x
k
x
n
y
n
k
1
n
x
n
x
n
y
2
2
3
Output signal of a system without memory at
instance n depends only on the input signal at
the same time instance, eg:
Output signal of a system with memory at
instance n depends on the input signal at
instances k
n, eg:
n
x
n
x
n
y
1
Systems with and without memory
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
7
)
10
(
n
x
n
x
n
y
A system is causal if its output signal at instance n
is dependent only on the input signal at instance n
and/or previous instances, eg:
)
1
(
n
x
n
x
n
y
noncausal
Causal systems
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
8
Stable/unstable system - quiz question
1.
Which of the system is stable?
a)
b)
c)
d)
0
n
n
n
u
a
n
y
)
(
2
n
x
k
n
y
)
(
3
n
x
n
y
N
n
n
x
n
y
0
where
u(n)
is a sequence of unit pulses
The system is considered to be stable if for input signal samples
x(n) such that |x(n)|<A (where: A
– is a finite constant) output signal
samples y(n) satisfy |y(n)|<B (where: B
– is also a finite constant) –
this is so called bounded-input bounded-output (BIBO) stability.
where
k
is a constant
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
9
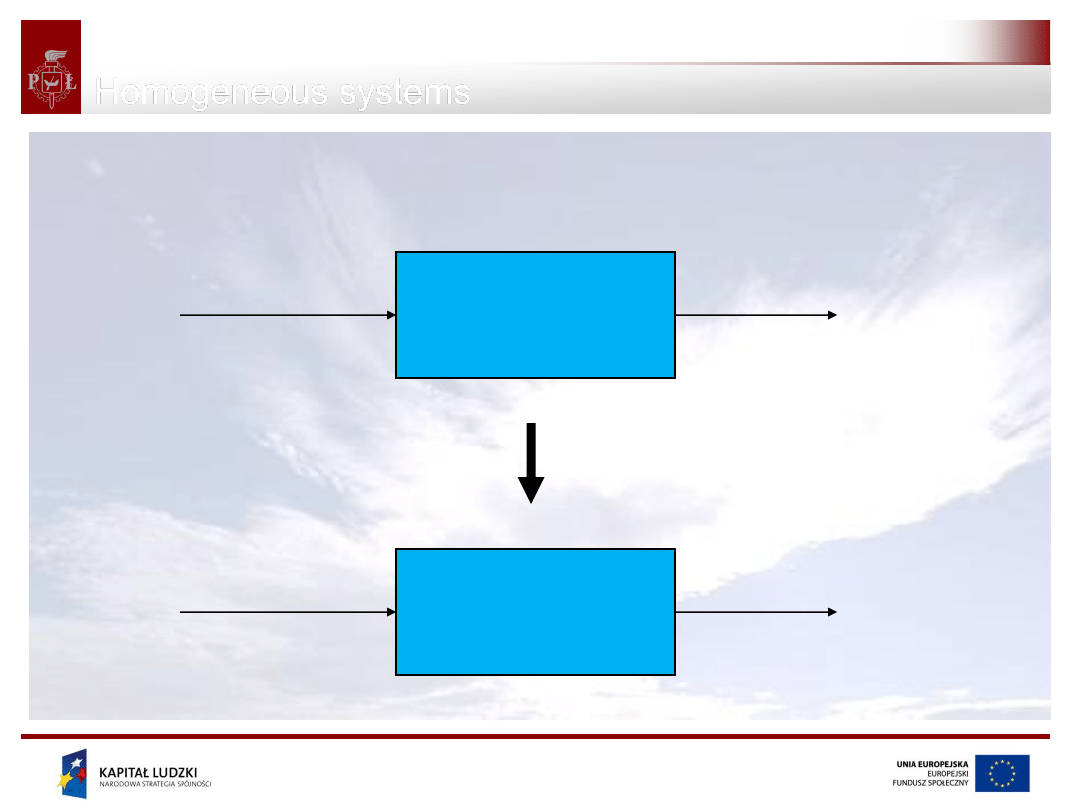
Homogeneous systems
System
IF:
THEN:
x(n)
y(n)
System
k
·x(n)
k
·y(n)
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
10
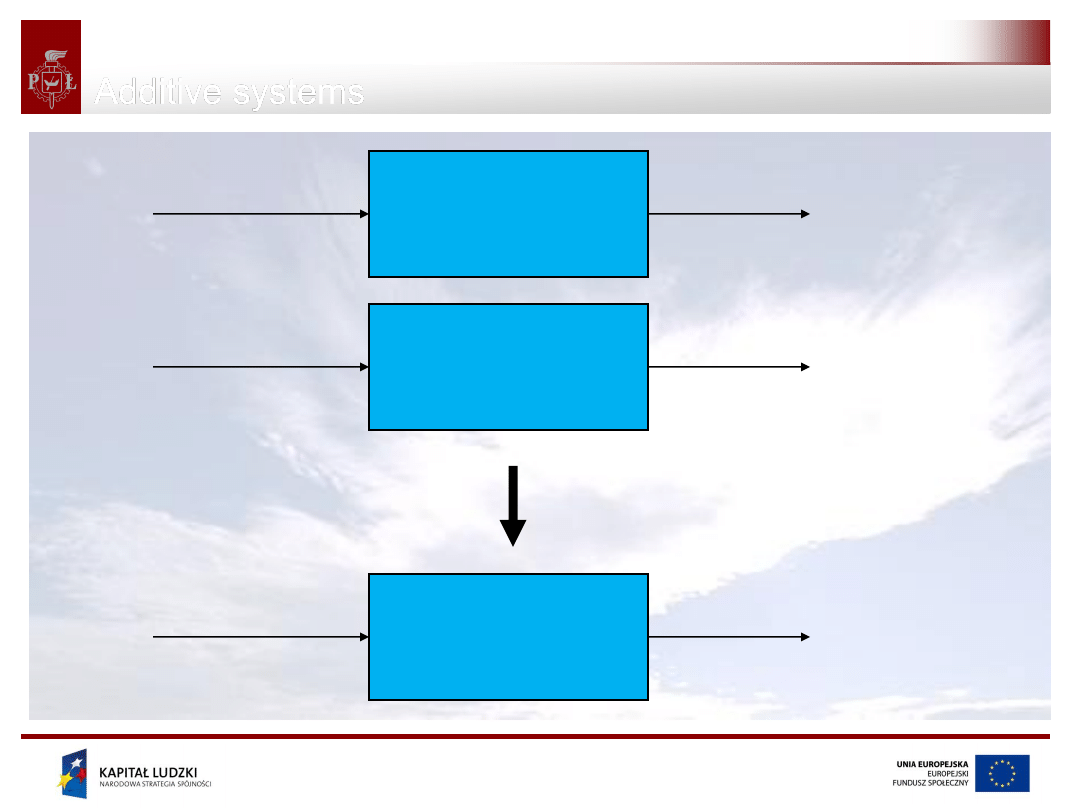
Additive systems
System
IF:
AND:
x1(n)
y1(n)
System
x2(n)
y2(n)
System
THEN:
x1(n) + x2(n)
y1(n) + y2(n)
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
11
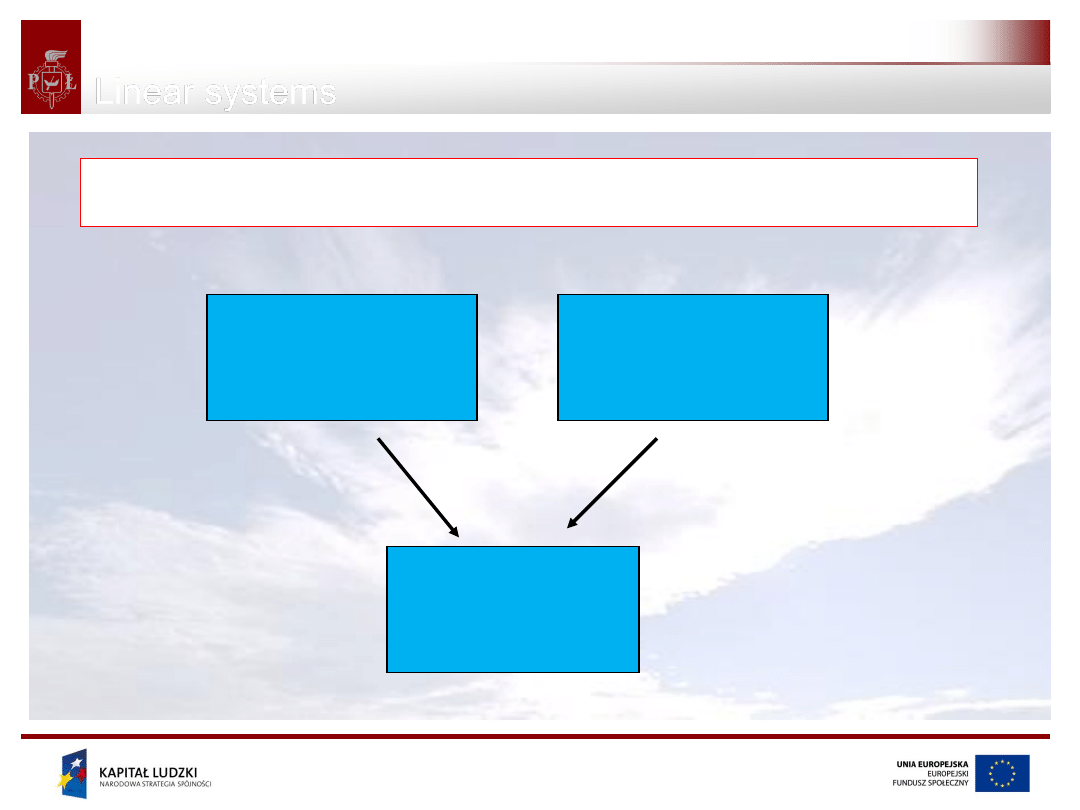
Linear systems
If the system is homogeneous and additive, it is linear.
homogeneous
linear
additive
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
12
ie. the response of a linear system to a sum of input
signals is equal to the sum of the responses of the
input signals.
Linear system example:
Nonlinear system example:
n
by
n
ay
n
x
bH
n
x
aH
n
bx
n
ax
H
2
1
2
1
2
1
n
x
n
y
2
Linear systems fulfill the superposition principle:
n
x
n
y
3
Superposition principle
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
13
1
2
n
x
n
y
Is the following system: linear?
5
1
2
1
1
n
x
n
y
3
2
2
1
n
x
and
n
x
Let:
7
1
2
2
2
n
x
n
y
However:
12
11
1
2
2
1
2
1
3
n
y
n
y
n
x
n
x
n
y
NO!
Conclusion:
The response of a linear system to
zero input is…?
Linear systems
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
14
1
2
n
x
n
y
Is the following system: linear?
But:
b
a
n
bx
n
ax
n
by
n
ay
2
1
2
1
2
2
Linear systems
n
by
n
ay
n
bx
n
ax
H
2
1
2
1
1
2
2
1
2
2
1
2
1
2
1
n
bx
n
ax
n
bx
n
ax
n
bx
n
ax
H
Remember:
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
15
Quiz questions
1. Which of these systems are linear? Show calculations.
a)
b)
c)
d)
e)
f)
N
n
n
x
n
y
0
)
(
3 n
x
n
y
)
(
2
n
x
k
n
y
)
(
2
n
x
n
y
d
x
t
y
t
o
)
(
))
(
log(
t
x
a
t
y
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
16
Time invariant systems have the following property:
IF
y(n)
is the response of the system to
x(n)
THEN
y(n-k)
is the response to
x(n-k).
k
n
x
H
k
n
y
n
x
H
n
y
Time invariant systems
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
17
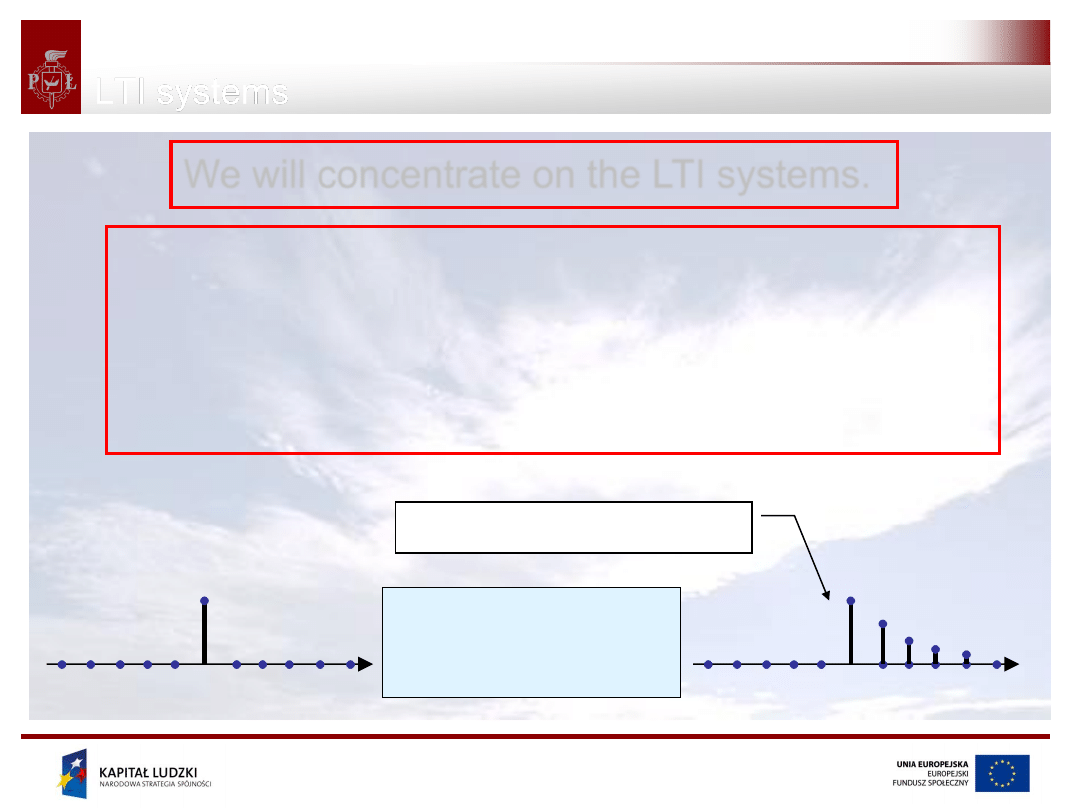
We will show that for LTI systems,
the knowledge of the system response to the
impulse
(n)
is enough to determine the response
of the system to any discrete time signal.
Linear system
(n)
0
0
h(n)
Impulse response
LTI systems
We will concentrate on the LTI systems.
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
18
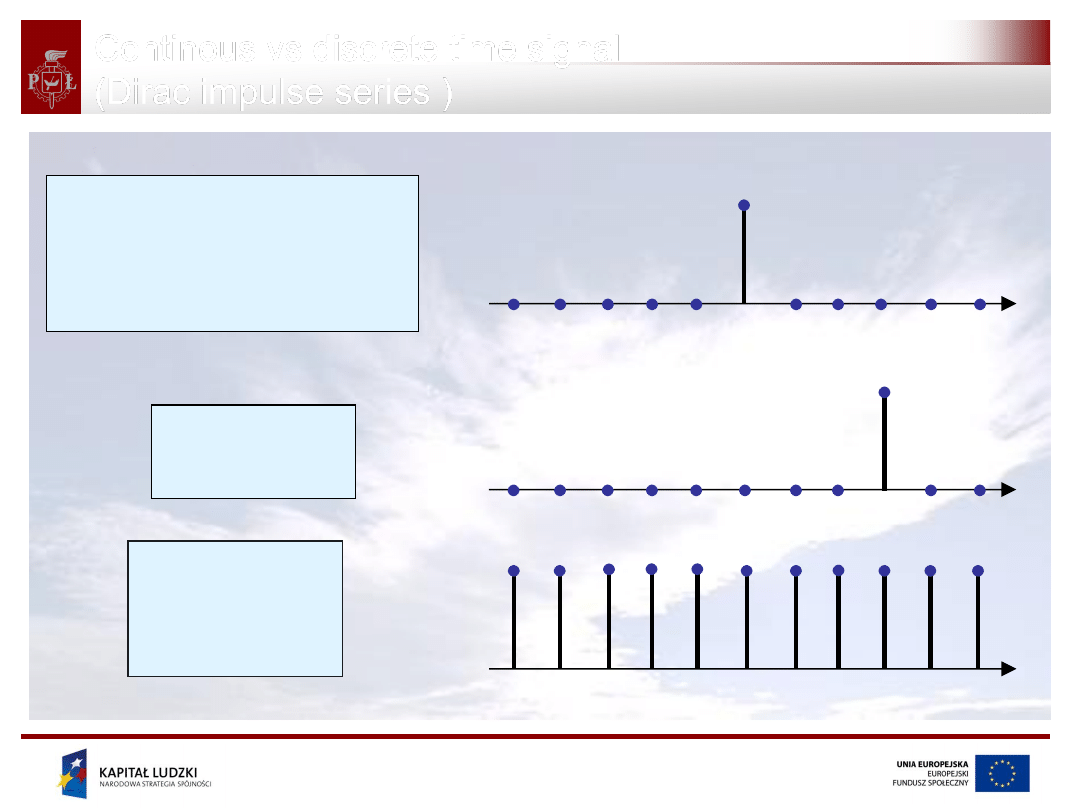
0
0
0
1
n
for
n
for
n
k
k
k
n
k
n
Unit impulse:
0
n
n=k
0
n
n=0
n
1
Continous vs discrete time signal
(Dirac impulse series )
1
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
19
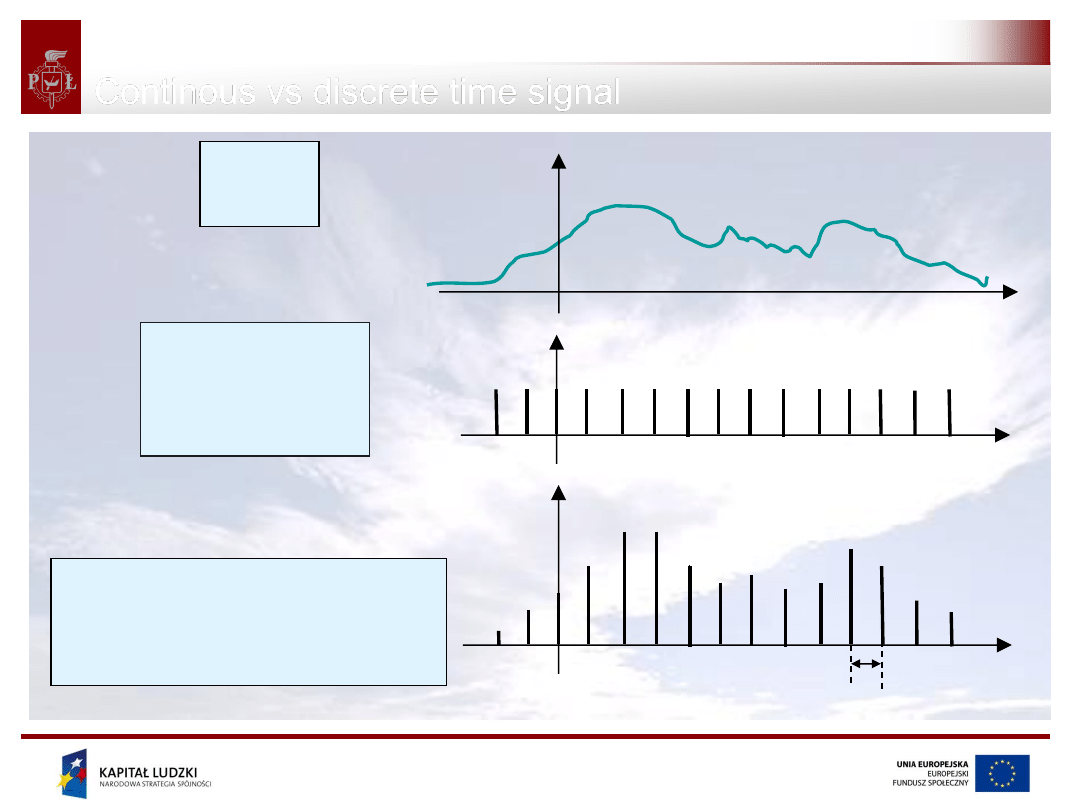
x(t)
t
0
x(n
t)
n
0
t
1 2 3
n
0
k
n
t
x
n
x
k
k
k
k
k
n
x
=
Continous vs discrete time signal
t
x
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
20
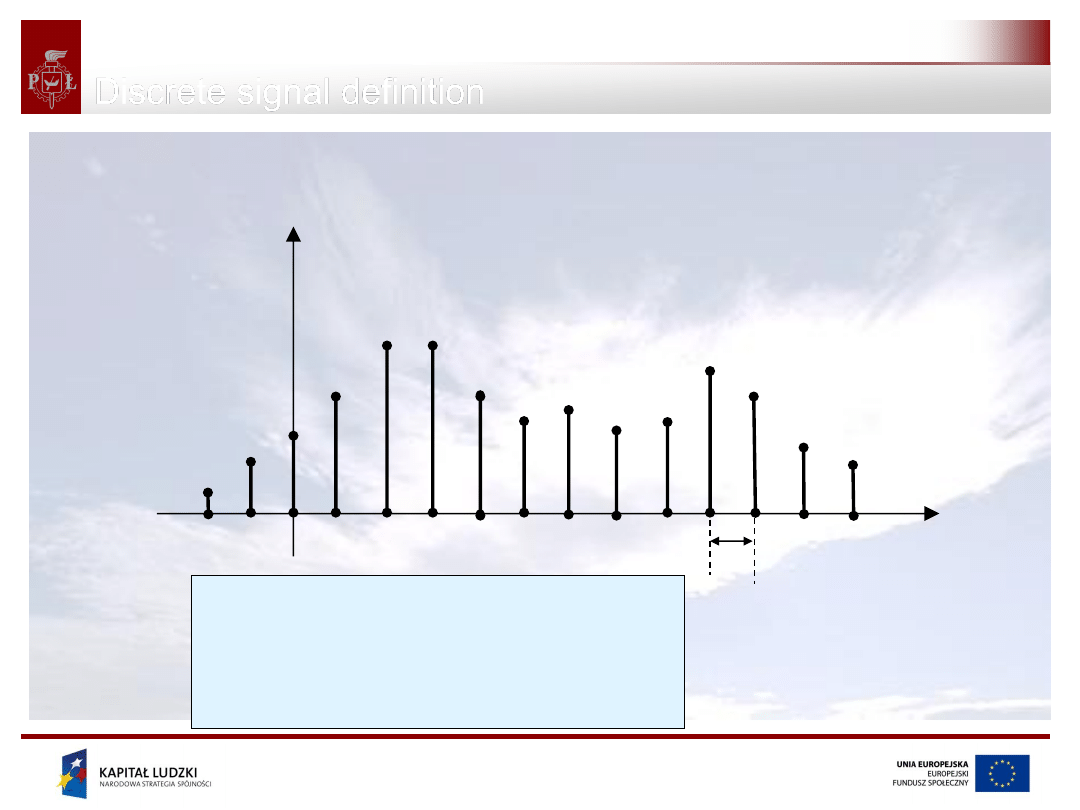
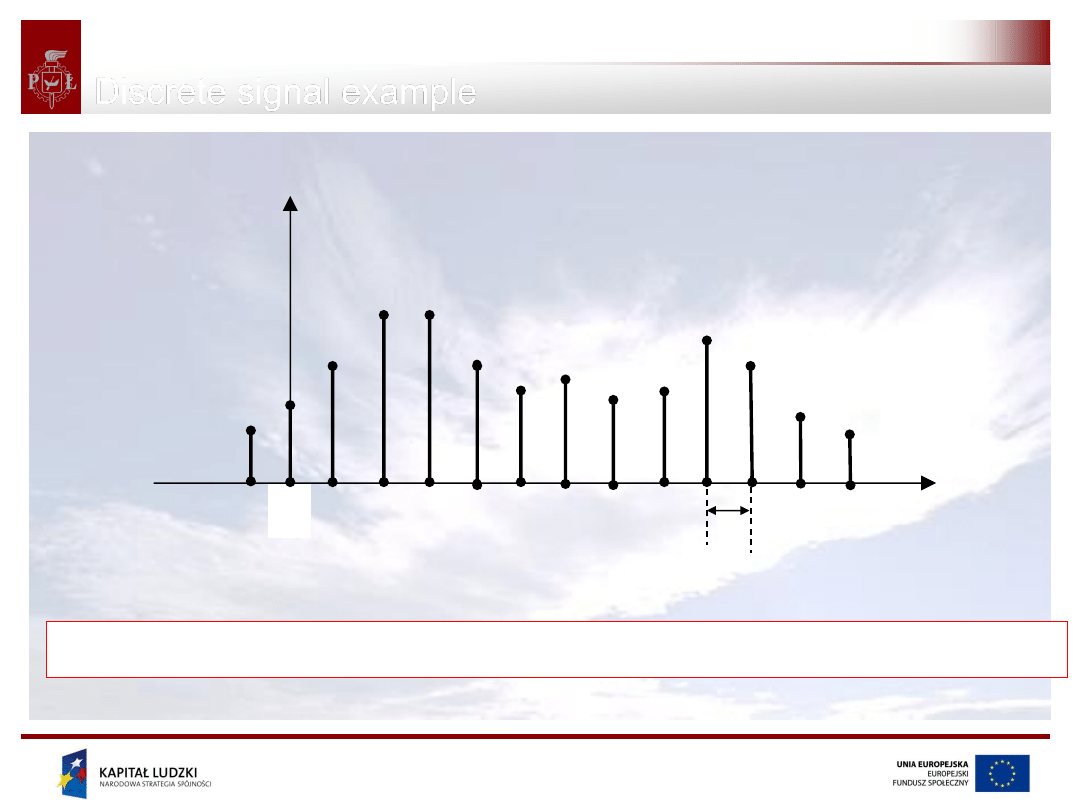
Discrete signal definition
Discrete time signal is an impulse series: {x(n
t)}
for
t
=1 {x(1), x
(2), … x(k), …}
x(n
t)
n
0
t
1 2 3
k
n
k
x
n
x
k
k
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
21
x(n
t)
n
0
t
1 2 3
2
2
1
1
0
0
1
1
n
x
n
x
n
x
n
x
n
x
-1
x(-1)
Discrete signal example
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
22
Input signal x(n):
k
n
k
x
n
x
k
k
Impulse response:
n
H
n
h
The response of the system to the input
x(n)
is determined according to the
superposition principle:
k
n
h
k
x
k
n
H
k
x
k
n
k
x
H
k
n
k
x
H
n
y
k
k
k
k
k
k
k
k
Response of the LTI system
to the discrete signal
Important
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
23
Input signal
x(n):
k
n
k
x
n
x
k
k
Output signal
y(n)
:
k
h
k
n
x
k
n
h
k
x
n
y
k
k
k
k
Response of the LTI system
to the discrete signal
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
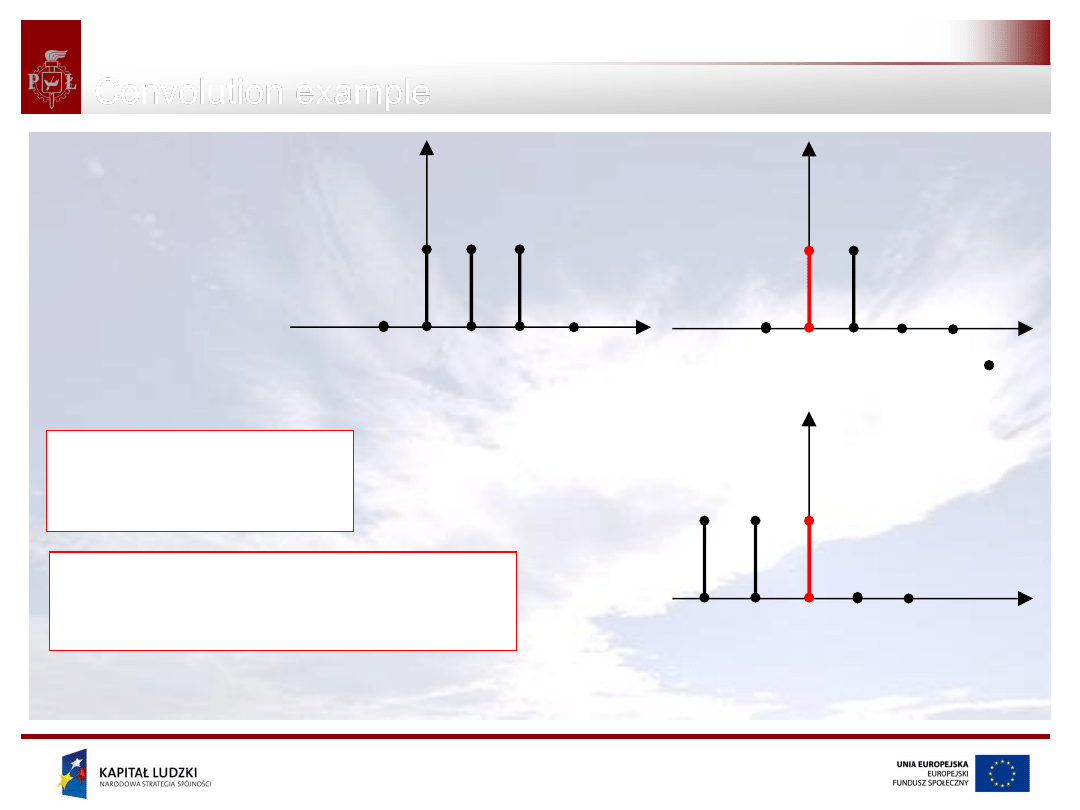
Convolution example
Signal Processing
24
]
1
,
1
[
1
,
1
,
1
n
h
n
x
x(k)
0 1 2 3
-1
k
h(k)
0 1 2 3
-1
k
x(-k)
0 1 2
-1
k
-2
1
0
0
0
0
h
x
k
h
k
x
y
k
k
k
h
k
n
x
n
y
k
k
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
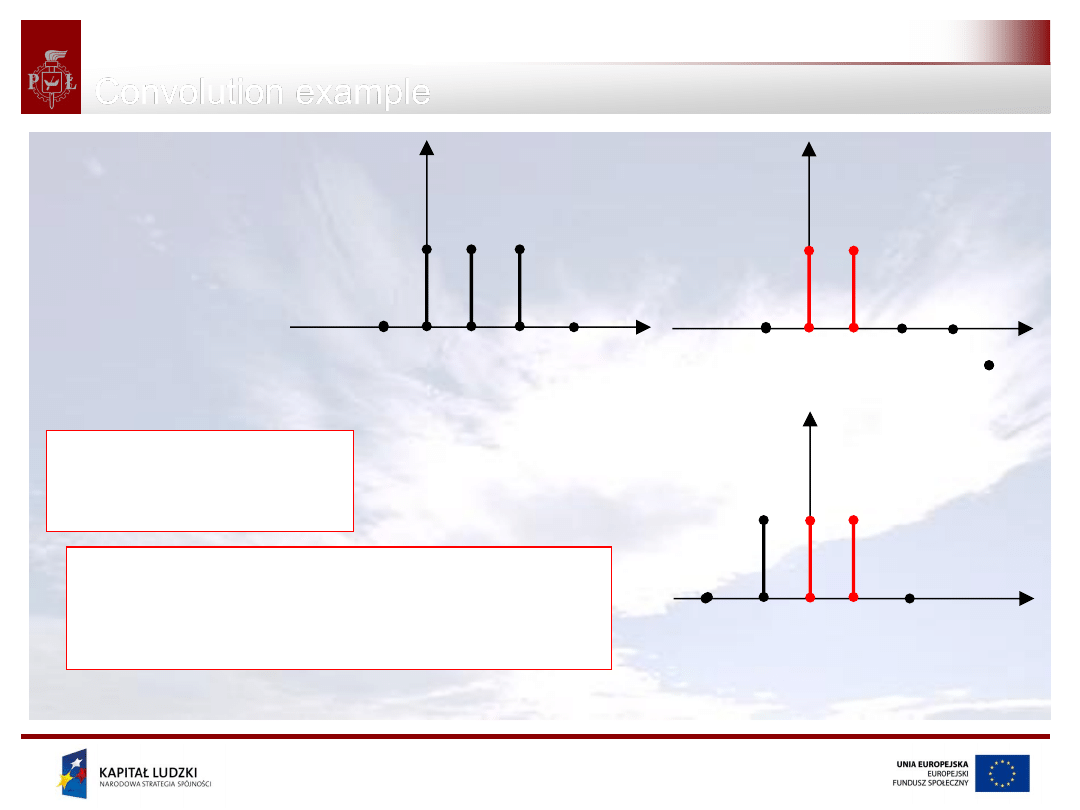
Convolution example
Signal Processing
25
k
h
k
n
x
n
y
k
k
x(k)
0 1 2 3
-1
k
h(k)
0 1 2 3
-1
k
x(1-k)
0 1 2
-1
k
-2
]
1
,
1
[
1
,
1
,
1
n
h
n
x
2
0
1
1
...
)
2
(
)
2
1
(
)
1
(
)
1
1
(
0
0
1
1
1
0
h
x
h
x
h
x
k
h
k
x
y
k
k
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
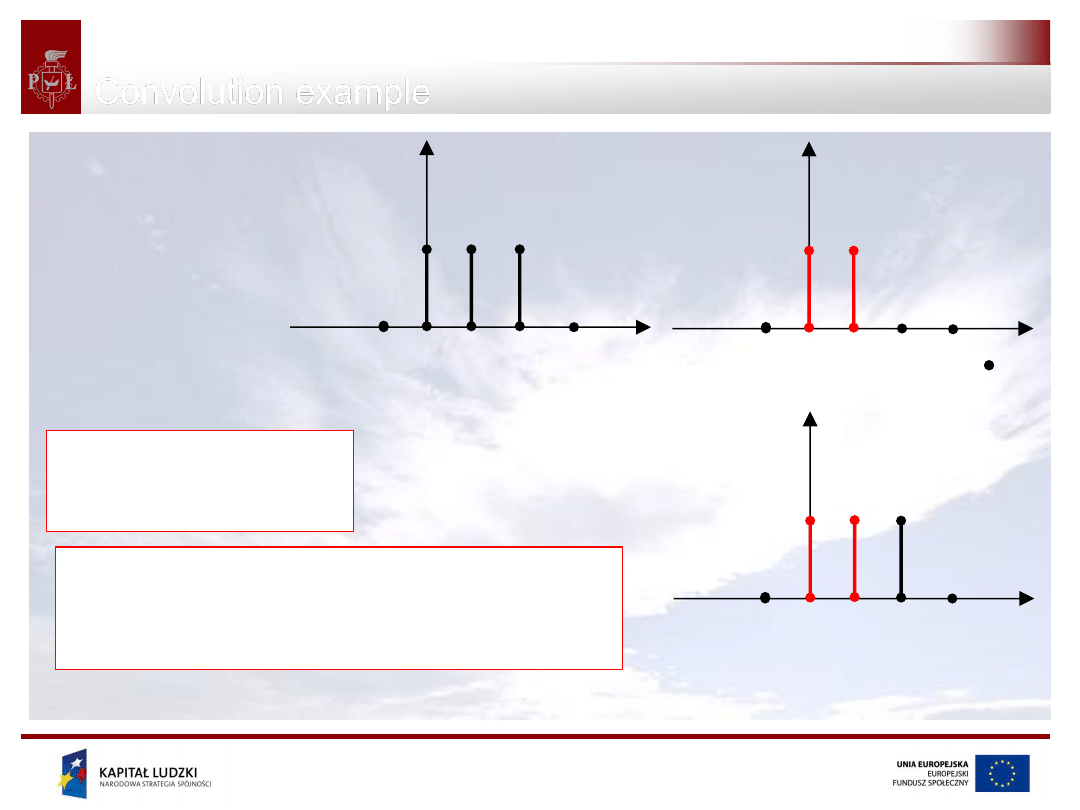
Convolution example
Signal Processing
26
k
h
k
n
x
n
y
k
k
x(k)
0 1 2 3
-1
k
h(k)
0 1 2 3
-1
k
x(2-k)
0 1 2
-1
k
-2
]
1
,
1
[
1
,
1
,
1
n
h
n
x
2
0
1
1
...
)
2
(
)
2
2
(
)
1
(
)
1
2
(
0
0
2
2
2
0
h
x
h
x
h
x
k
h
k
x
y
k
k
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
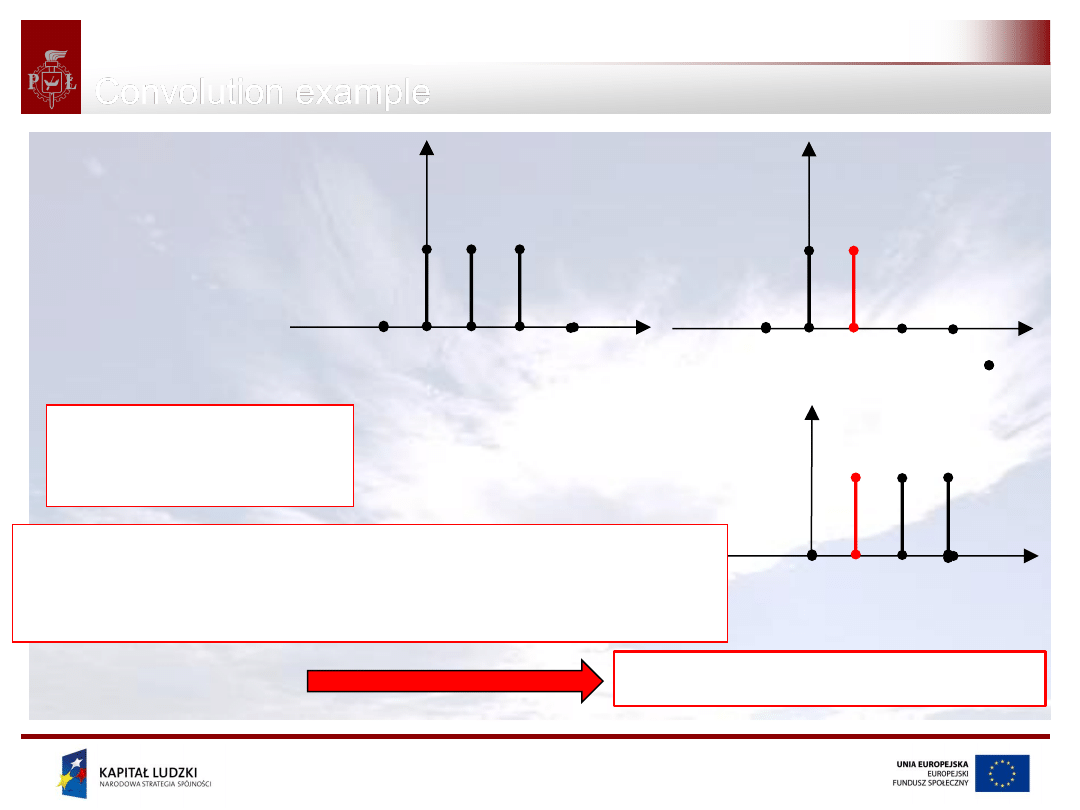
Convolution example
Signal Processing
27
k
h
k
n
x
n
y
k
k
x(k)
0 1 2 3
-1
k
h(k)
0 1 2 3
-1
k
x(3-k)
0 1 2
-1
k
]
1
,
1
[
1
,
1
,
1
n
h
n
x
1
0
1
0
1
1
1
1
0
)
2
(
)
2
3
(
)
1
(
)
1
3
(
0
0
3
3
3
0
h
x
h
x
h
x
k
h
k
x
y
k
k
]
1
2
2
1
[
)
(
*
)
(
n
h
n
x
n
y
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
28
Convolution
k
n
h
k
x
n
h
n
x
n
y
k
k
d
t
h
x
t
h
t
x
t
y
Continuous:
Discrete:
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
29
Equation:
is called the convolution of
x(n)
with
h(n)
, ie.
Input series with
impulse response of the system.
n
h
n
x
k
n
h
k
x
n
y
k
k
k
n
x
k
h
k
n
h
k
x
n
y
k
k
k
k
Convolution
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
30
A response of a linear system to a periodic signal
Let the input signal be
:
The output signal
y(n)
:
H
n
x
k
h
e
e
k
h
e
k
h
k
n
x
n
y
k
k
k
j
n
j
k
k
k
n
j
k
k
n
j
e
n
x
H
n
j
e
n
j
e
H
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
31
-5
0
5
10
15
20
-4
-2
0
2
4
-5
0
5
10
15
20
0
2
4
-5
0
5
10
15
20
-10
0
10
Signal x
Signal h
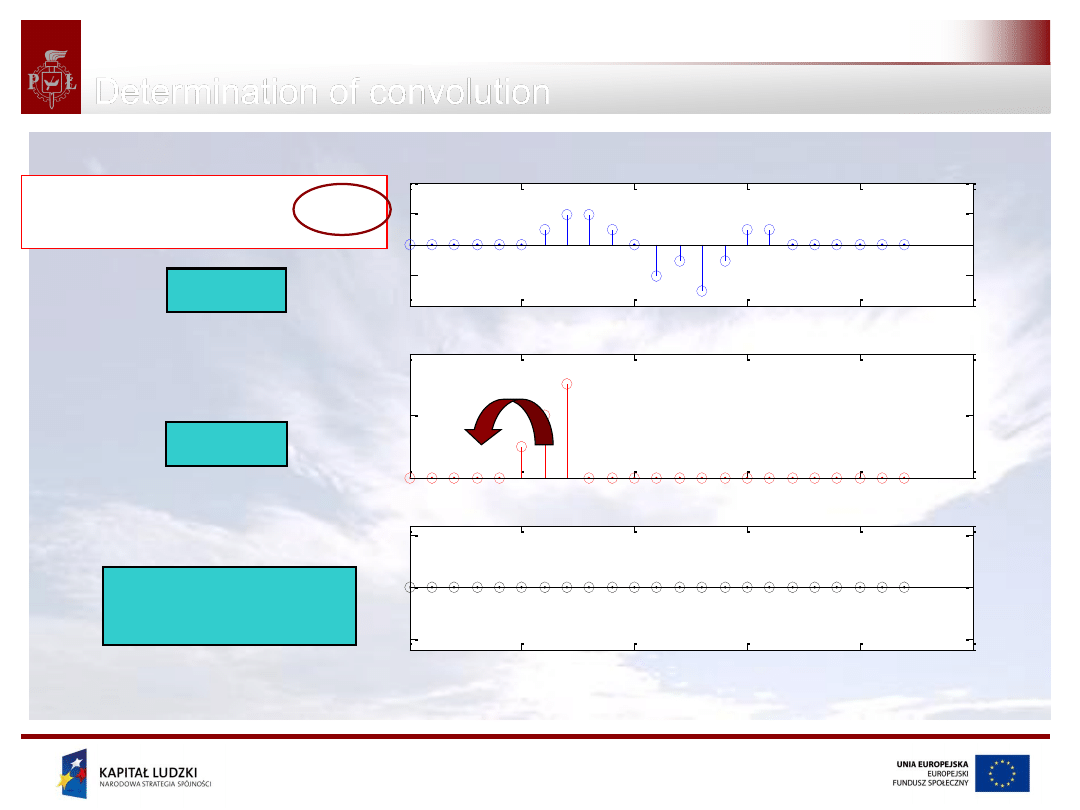
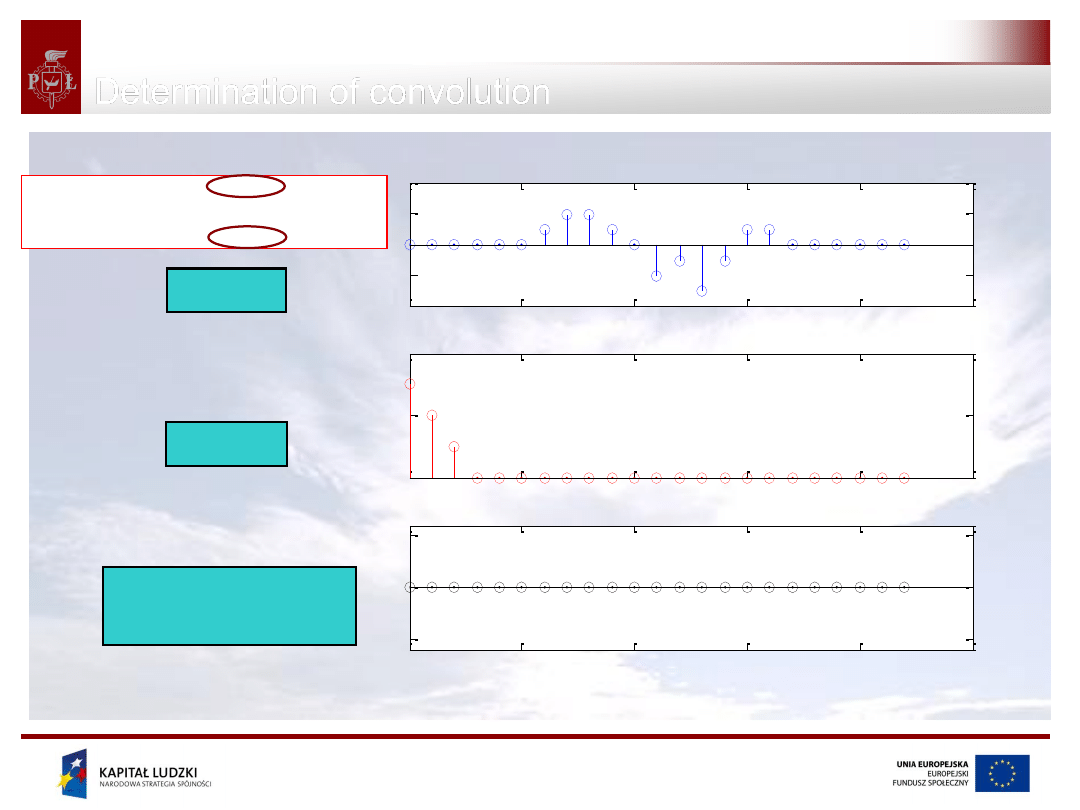
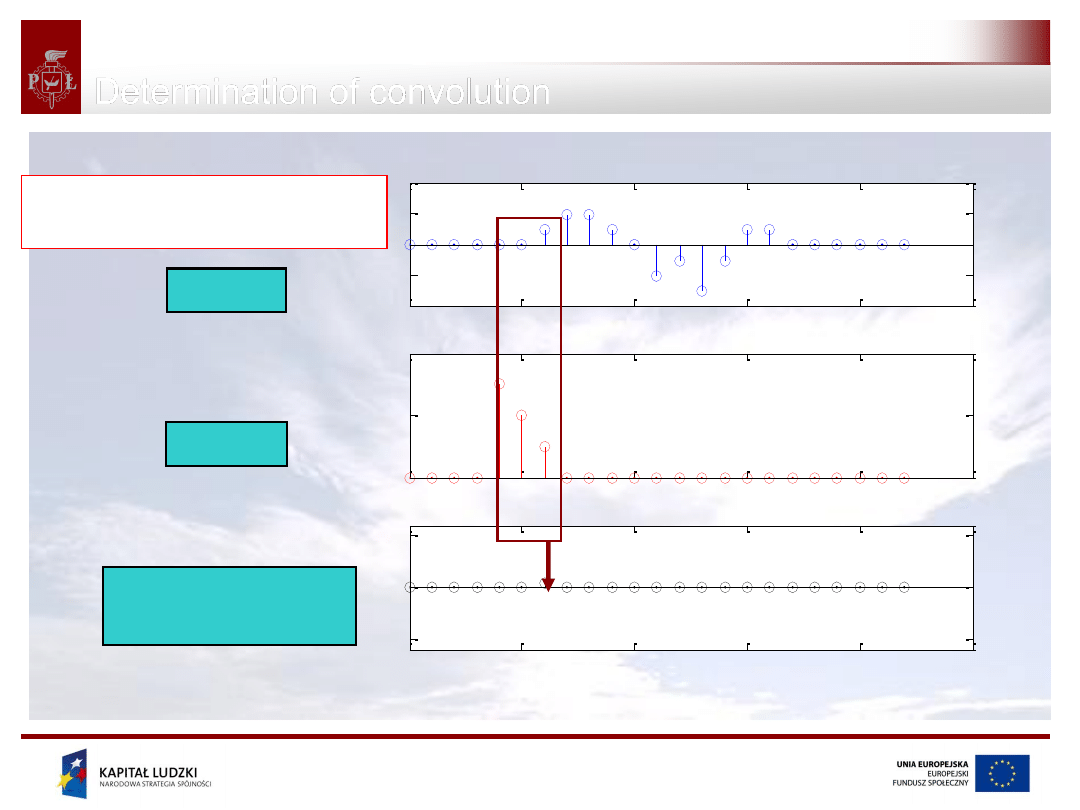
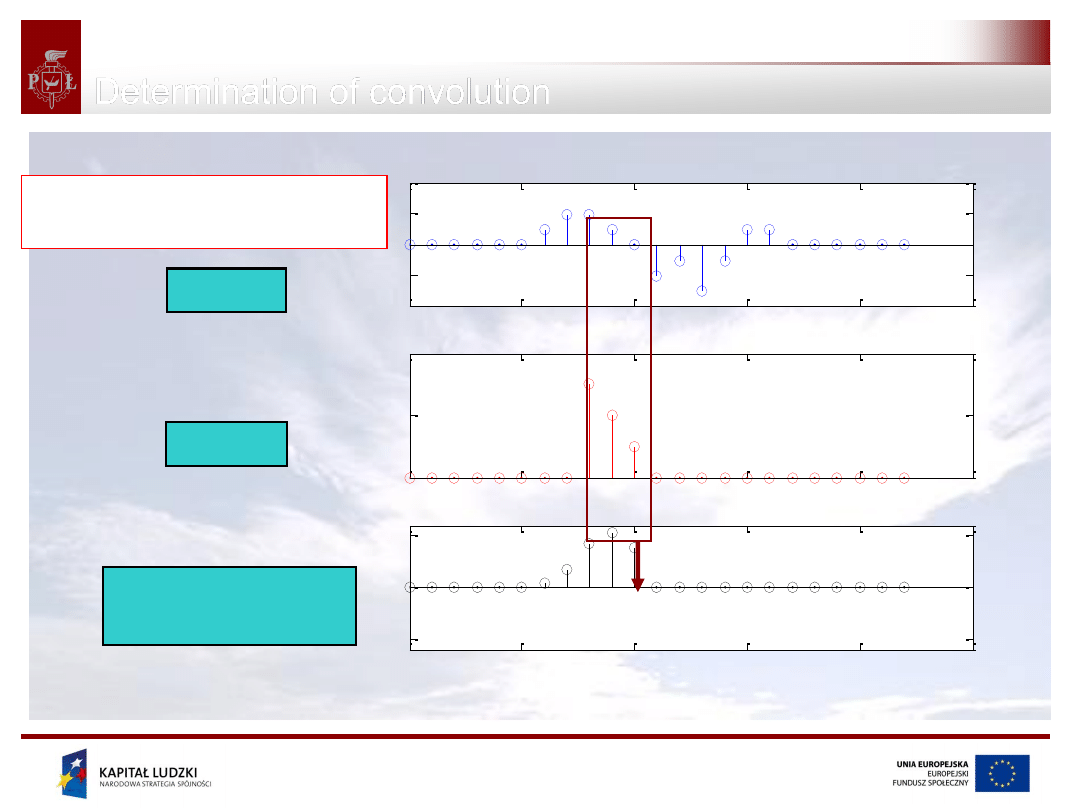
The result of
convolution
k
n
h
k
x
n
h
n
x
n
y
k
k
Determination of convolution
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
32
-5
0
5
10
15
20
-4
-2
0
2
4
-5
0
5
10
15
20
0
2
4
-5
0
5
10
15
20
-10
0
10
Signal x
Signal h
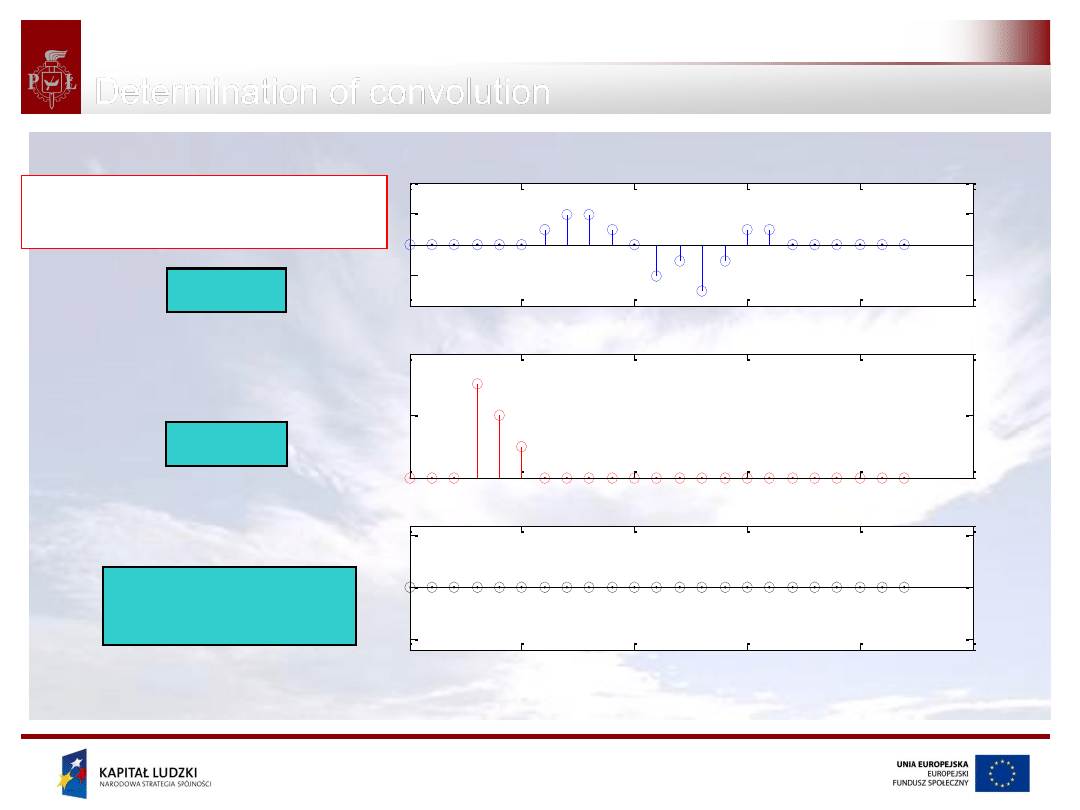
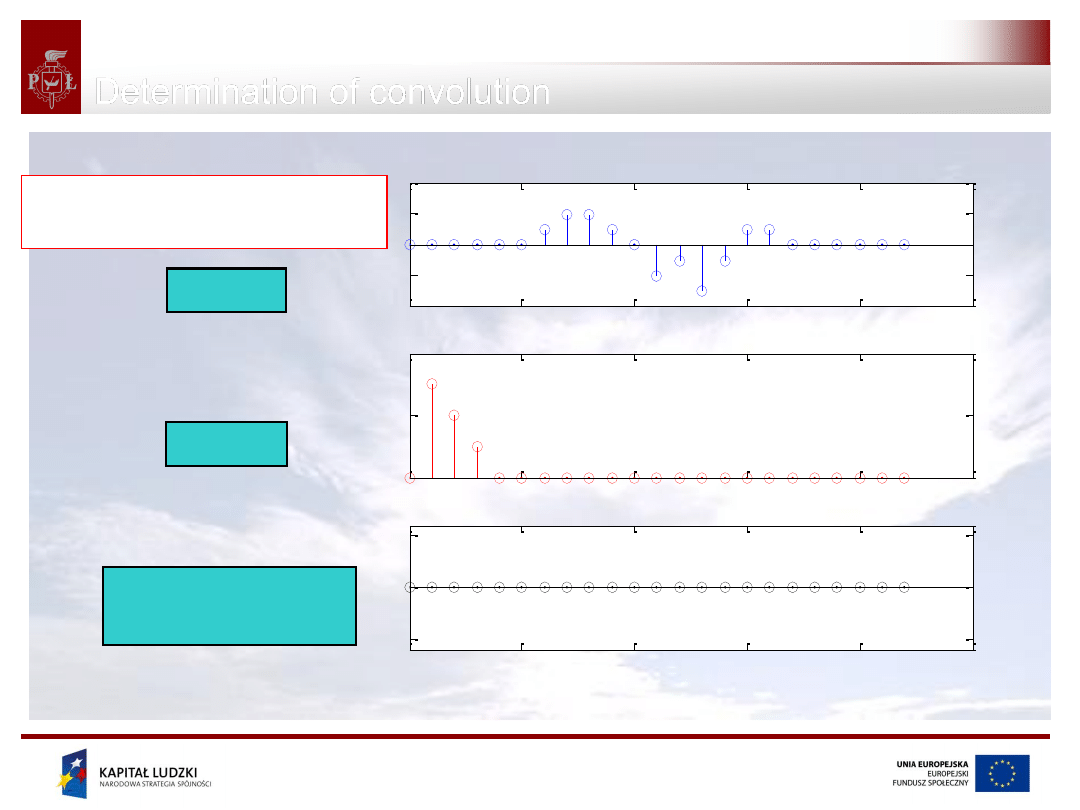
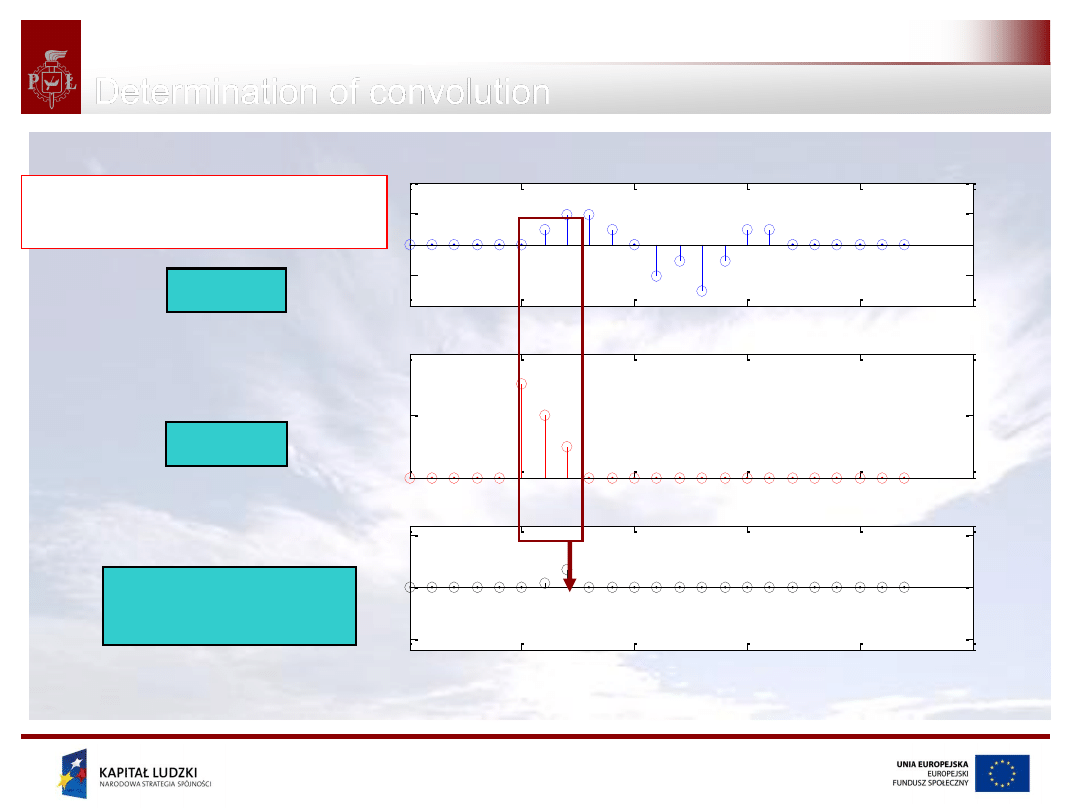
The result of
convolution
k
n
h
k
x
n
h
n
x
n
y
k
k
Determination of convolution
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
33
Signal x
Signal h
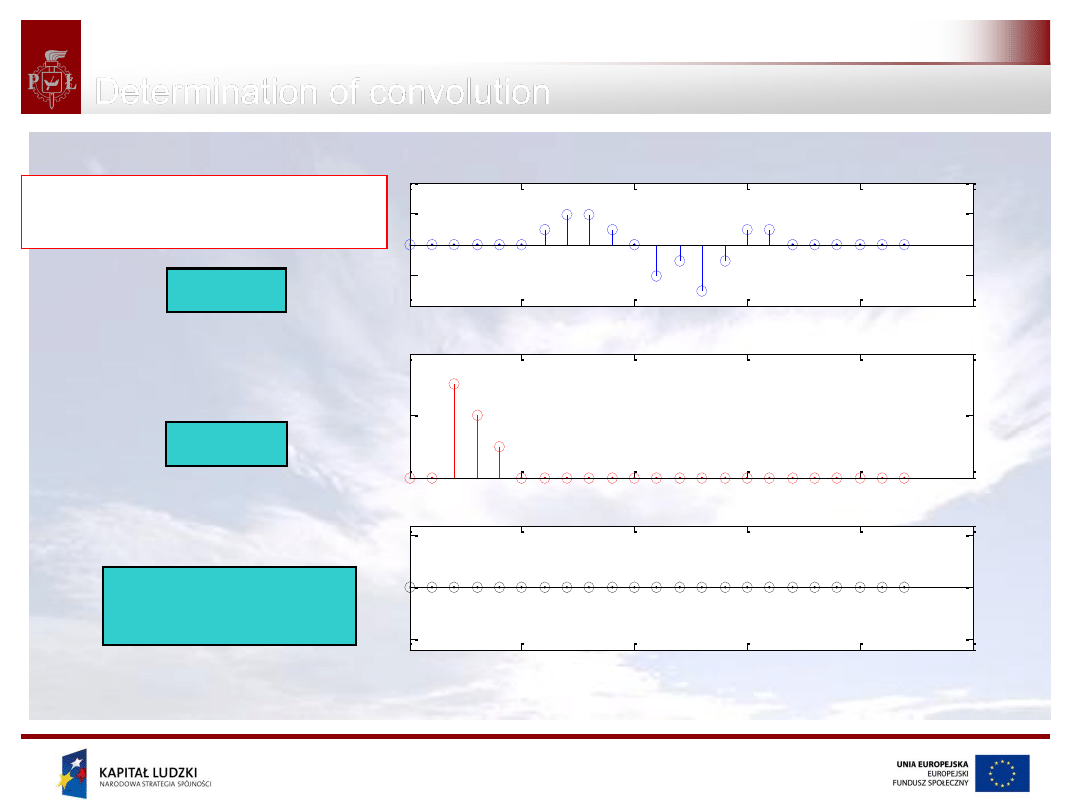
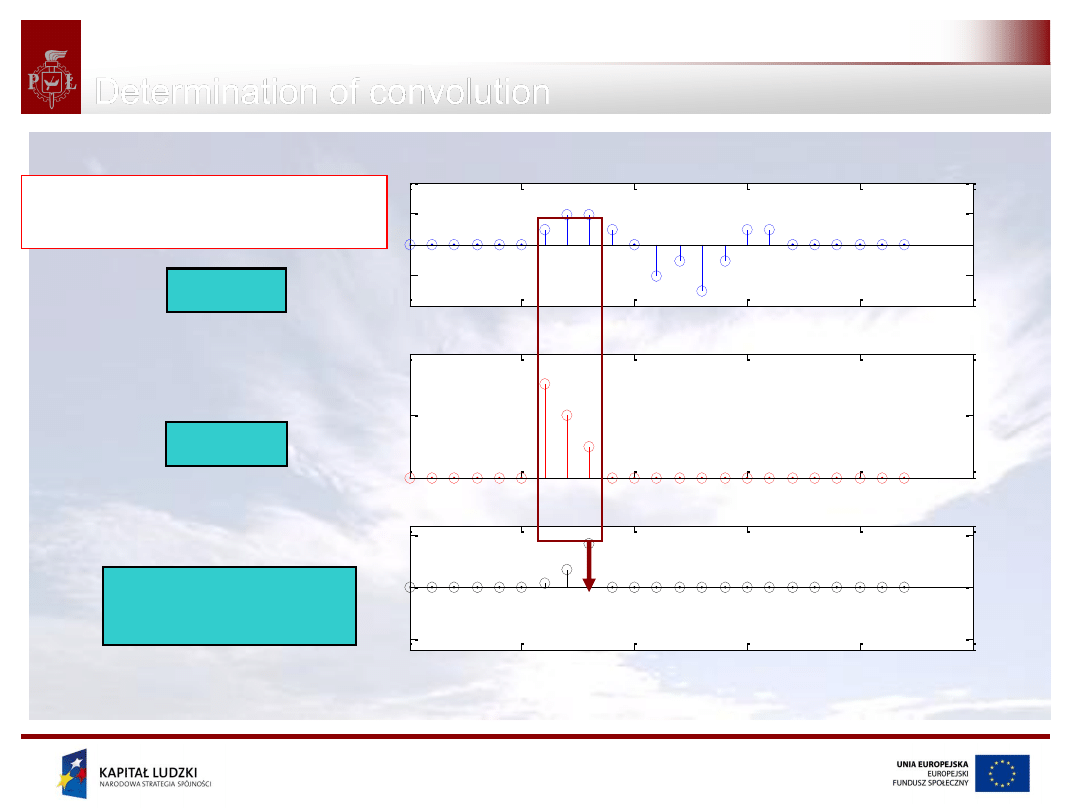
The result of
convolution
-5
0
5
10
15
20
-4
-2
0
2
4
-5
0
5
10
15
20
0
2
4
-5
0
5
10
15
20
-10
0
10
k
n
h
k
x
n
h
n
x
n
y
k
k
Determination of convolution
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
34
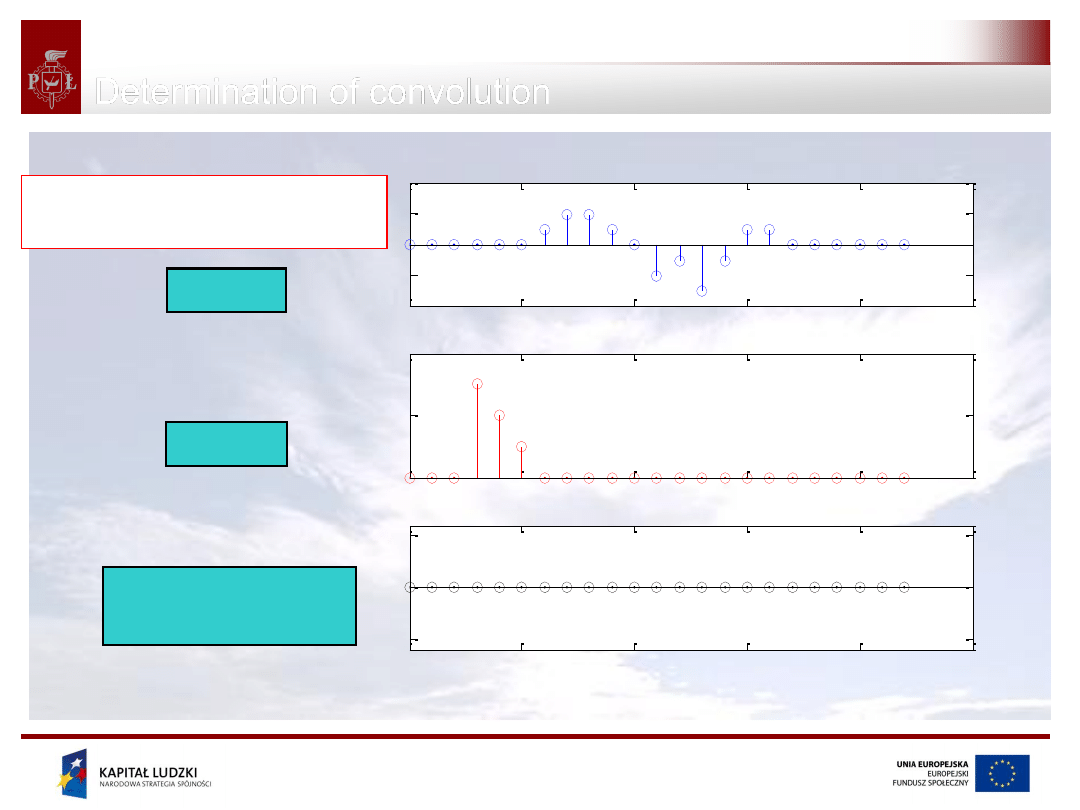
Signal x
Signal h
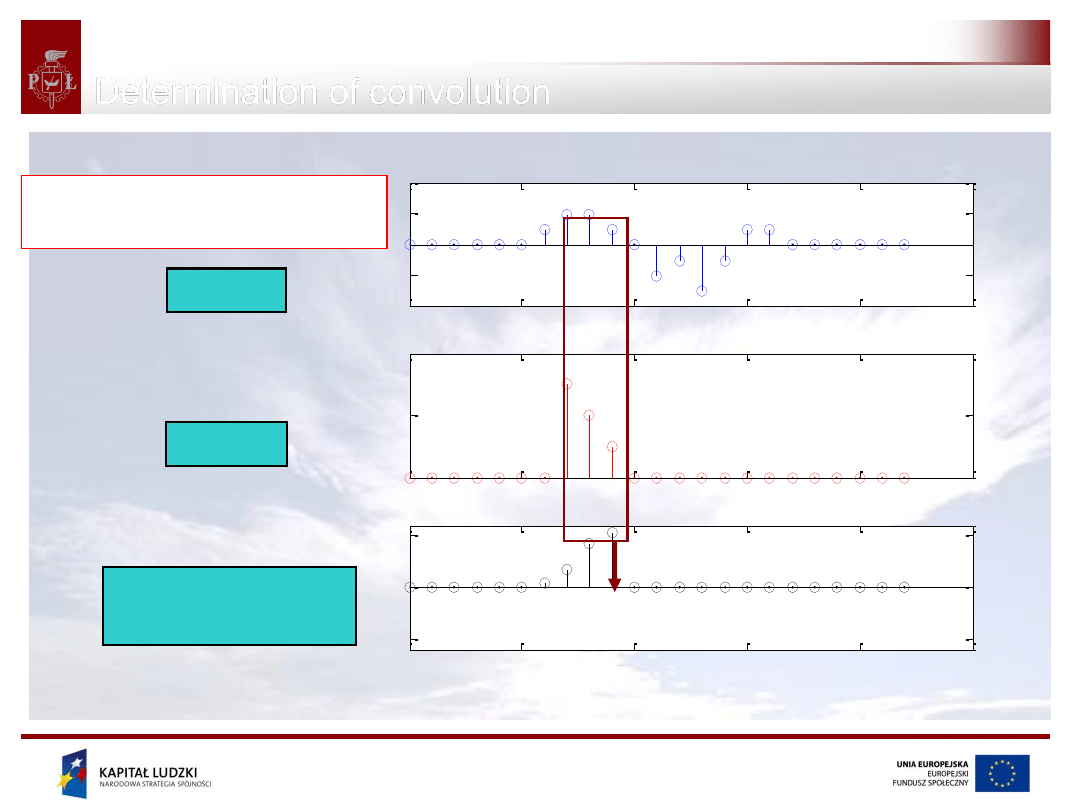
The result of
convolution
-5
0
5
10
15
20
-4
-2
0
2
4
-5
0
5
10
15
20
0
2
4
-5
0
5
10
15
20
-10
0
10
k
n
h
k
x
n
h
n
x
n
y
k
k
Determination of convolution
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
35
Signal x
Signal h
The result of
convolution
-5
0
5
10
15
20
-4
-2
0
2
4
-5
0
5
10
15
20
0
2
4
-5
0
5
10
15
20
-10
0
10
k
n
h
k
x
n
h
n
x
n
y
k
k
Determination of convolution
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
36
Signal x
Signal h
The result of
convolution
-5
0
5
10
15
20
-4
-2
0
2
4
-5
0
5
10
15
20
0
2
4
-5
0
5
10
15
20
-10
0
10
k
n
h
k
x
n
h
n
x
n
y
k
k
Determination of convolution
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
37
Signal x
Signal h
The result of
convolution
-5
0
5
10
15
20
-4
-2
0
2
4
-5
0
5
10
15
20
0
2
4
-5
0
5
10
15
20
-10
0
10
k
n
h
k
x
n
h
n
x
n
y
k
k
*
Determination of convolution
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
38
Signal x
Signal h
The result of
convolution
-5
0
5
10
15
20
-4
-2
0
2
4
-5
0
5
10
15
20
0
2
4
-5
0
5
10
15
20
-10
0
10
k
n
h
k
x
n
h
n
x
n
y
k
k
*
Determination of convolution
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
39
Signal x
Signal h
The result of
convolution
-5
0
5
10
15
20
-4
-2
0
2
4
-5
0
5
10
15
20
0
2
4
-5
0
5
10
15
20
-10
0
10
k
n
h
k
x
n
h
n
x
n
y
k
k
*
Determination of convolution
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
40
Signal x
Signal h
The result of
convolution
-5
0
5
10
15
20
-4
-2
0
2
4
-5
0
5
10
15
20
0
2
4
-5
0
5
10
15
20
-10
0
10
k
n
h
k
x
n
h
n
x
n
y
k
k
*
Determination of convolution
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
41
Signal x
Signal h
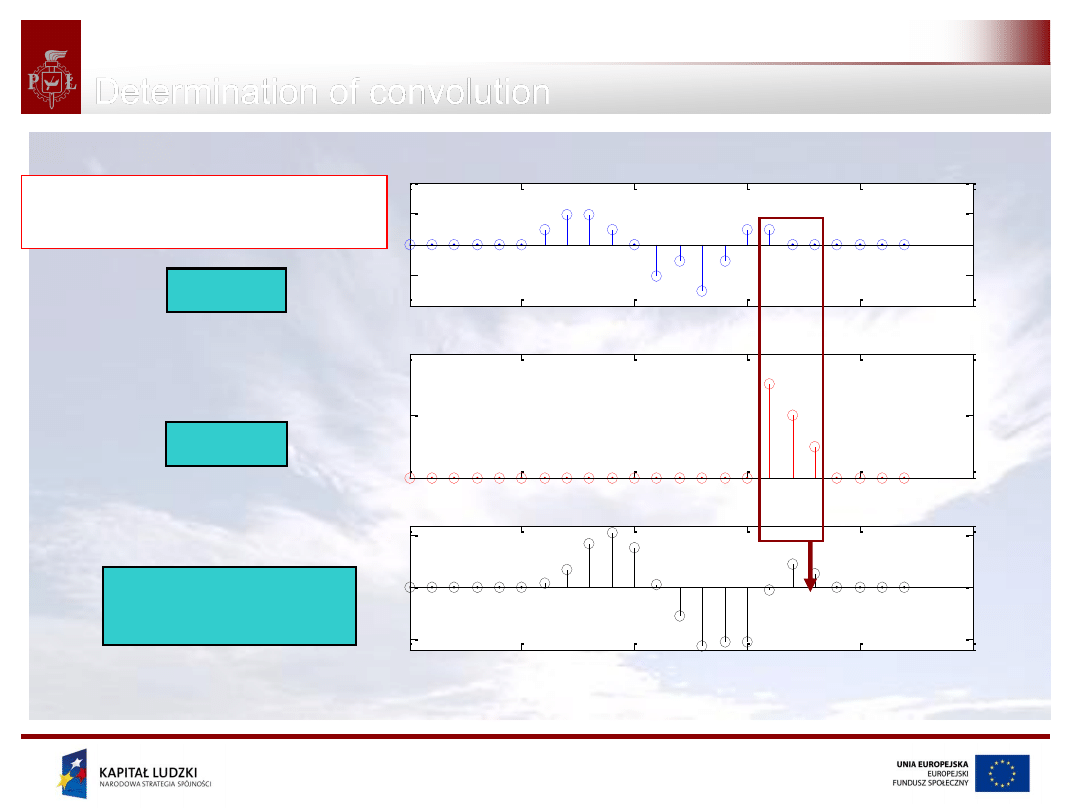
The result of
convolution
-5
0
5
10
15
20
-4
-2
0
2
4
-5
0
5
10
15
20
0
2
4
-5
0
5
10
15
20
-10
0
10
k
n
h
k
x
n
h
n
x
n
y
k
k
*
Determination of convolution
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
42
Signal x
Signal h
The result of
convolution
-5
0
5
10
15
20
-4
-2
0
2
4
-5
0
5
10
15
20
0
2
4
-5
0
5
10
15
20
-10
0
10
k
n
h
k
x
n
h
n
x
n
y
k
k
*
Determination of convolution
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
43
Signal x
Signal h
The result of
convolution
-5
0
5
10
15
20
-4
-2
0
2
4
-5
0
5
10
15
20
0
2
4
-5
0
5
10
15
20
-10
0
10
k
n
h
k
x
n
h
n
x
n
y
k
k
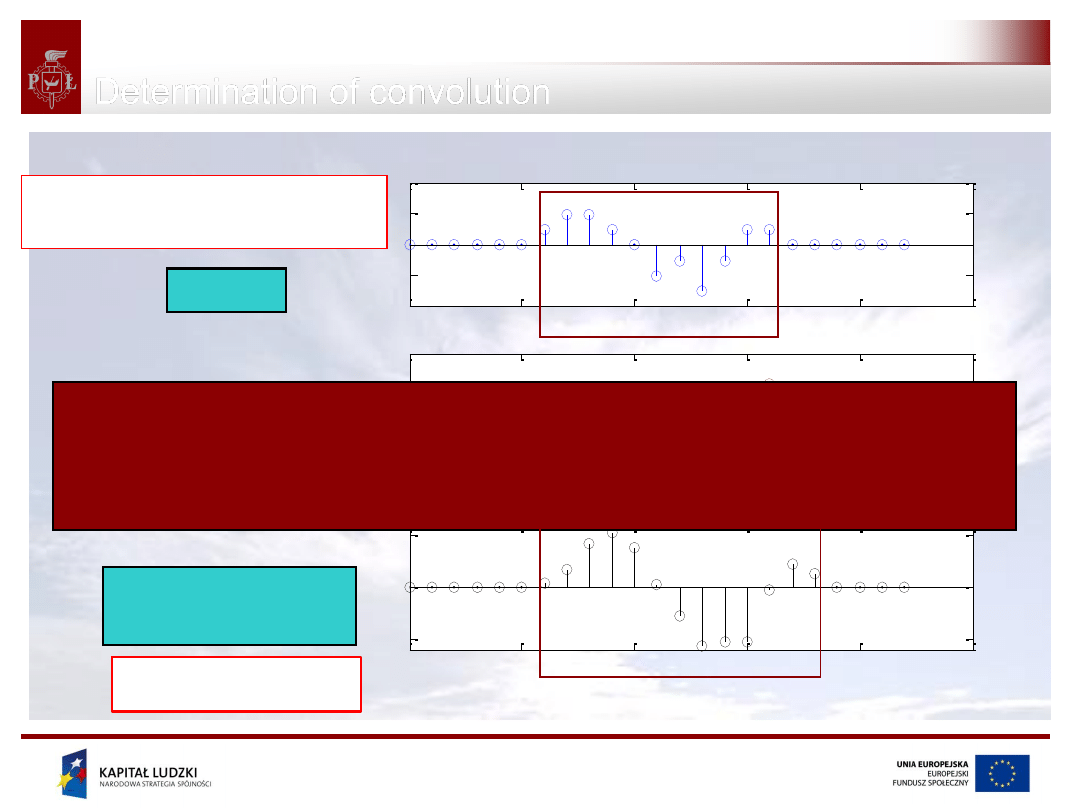
Pay attention to the length of the result.
Compare the input signal x with its convolution with h.
Determination of convolution
1
N
M
L
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
44
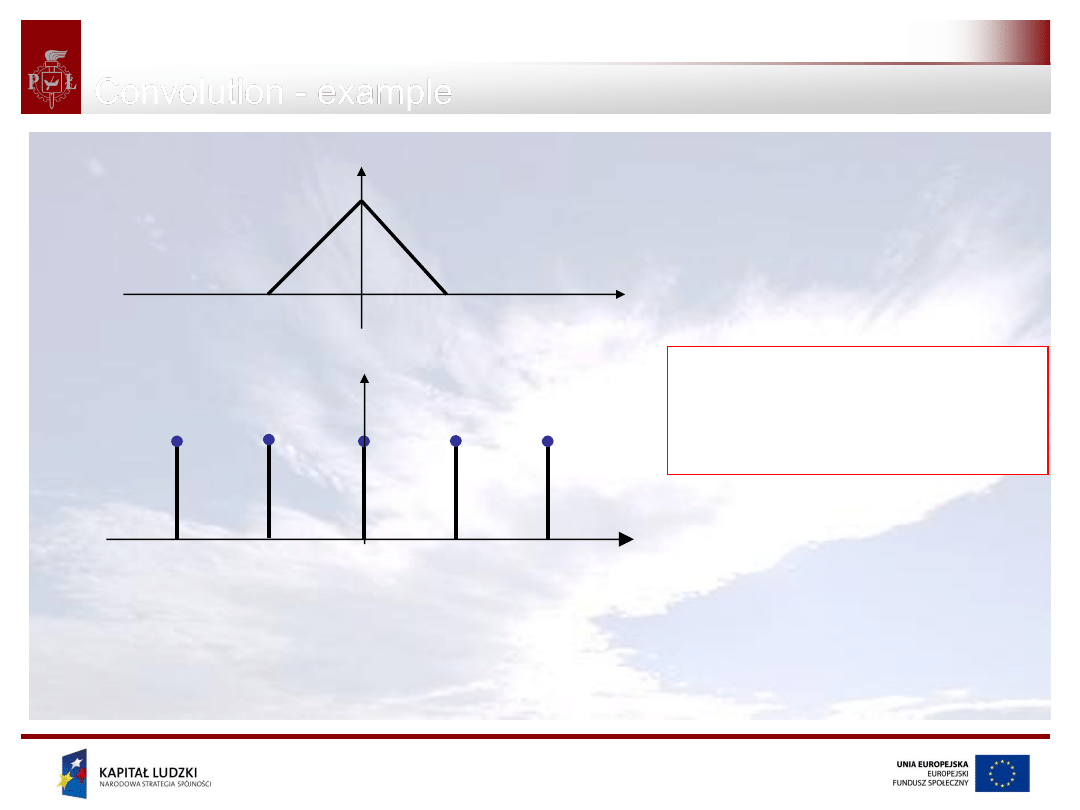
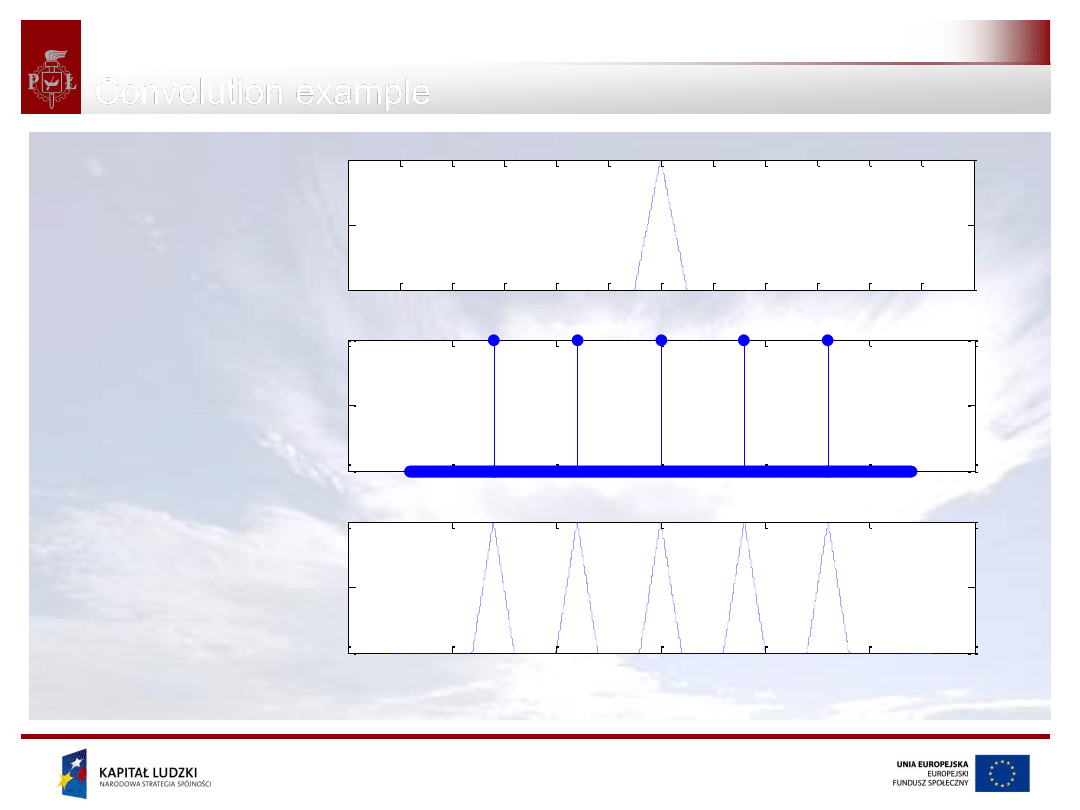
Determine y(t)= x(t)
h(t), for:
t=4,
t=2,
t=3/2 i
t=1
1
-1
t
h(t)
d
t
h
x
t
y
0
t
t
2
t
-2
t
-
t
x(t)
1
1
Convolution - example
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
45
-10
-8
-6
-4
-2
0
2
4
6
8
10
0
0.5
1
h
-15
-10
-5
0
5
10
15
0
0.5
1
x
-15
-10
-5
0
5
10
15
0
0.5
1
c
o
n
v
(x
,h
)
t=4
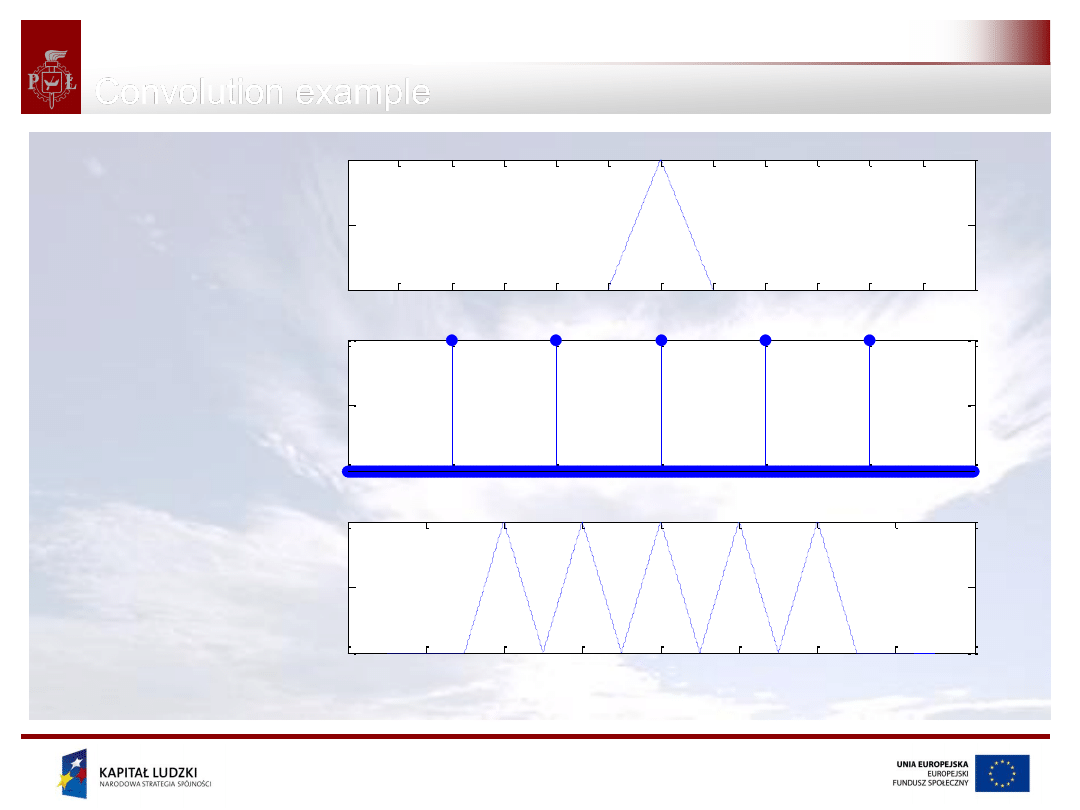
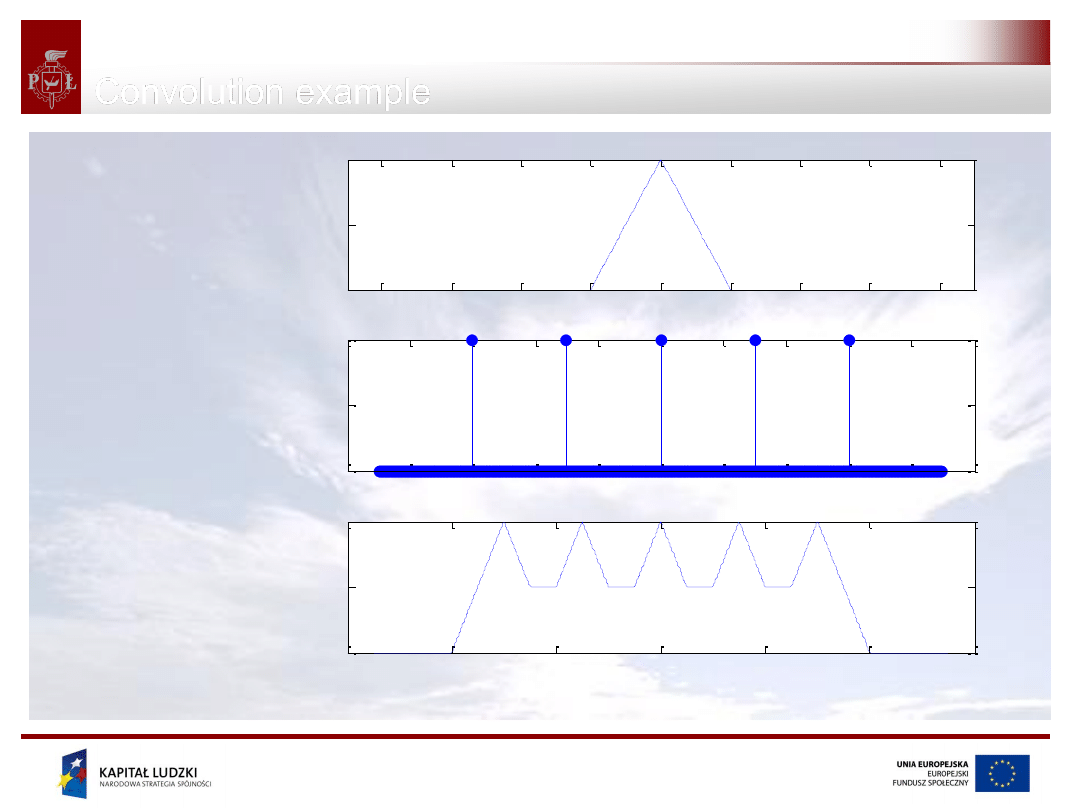
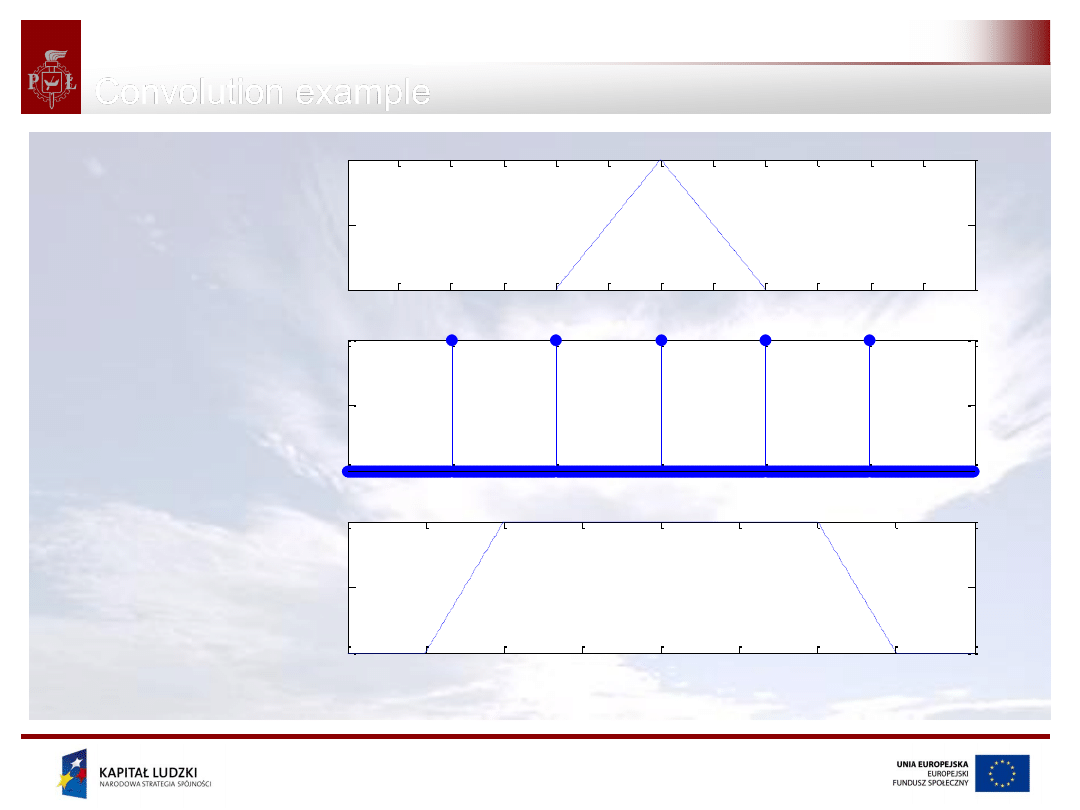
Convolution example
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
46
-5
-4
-3
-2
-1
0
1
2
3
4
5
0
0.5
1
h
-6
-4
-2
0
2
4
6
0
0.5
1
x
-8
-6
-4
-2
0
2
4
6
8
0
0.5
1
c
o
n
v
(x
,h
)
t=2
Convolution example
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
47
-4
-3
-2
-1
0
1
2
3
4
0
0.5
1
h
-5
-4
-3
-2
-1
0
1
2
3
4
5
0
0.5
1
x
-6
-4
-2
0
2
4
6
0
0.5
1
c
o
n
v
(x
,h
)
t=1.5
Convolution example
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
48
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
0
0.5
1
h
-3
-2
-1
0
1
2
3
0
0.5
1
x
-4
-3
-2
-1
0
1
2
3
4
0
0.5
1
c
o
n
v
(x
,h
)
t=1
Convolution example
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
49
Joy of Convolution
A free tutorial on convolution can be found in the internet at:
•
http://www.jhu.edu/~signals/convolve/index.html
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
50
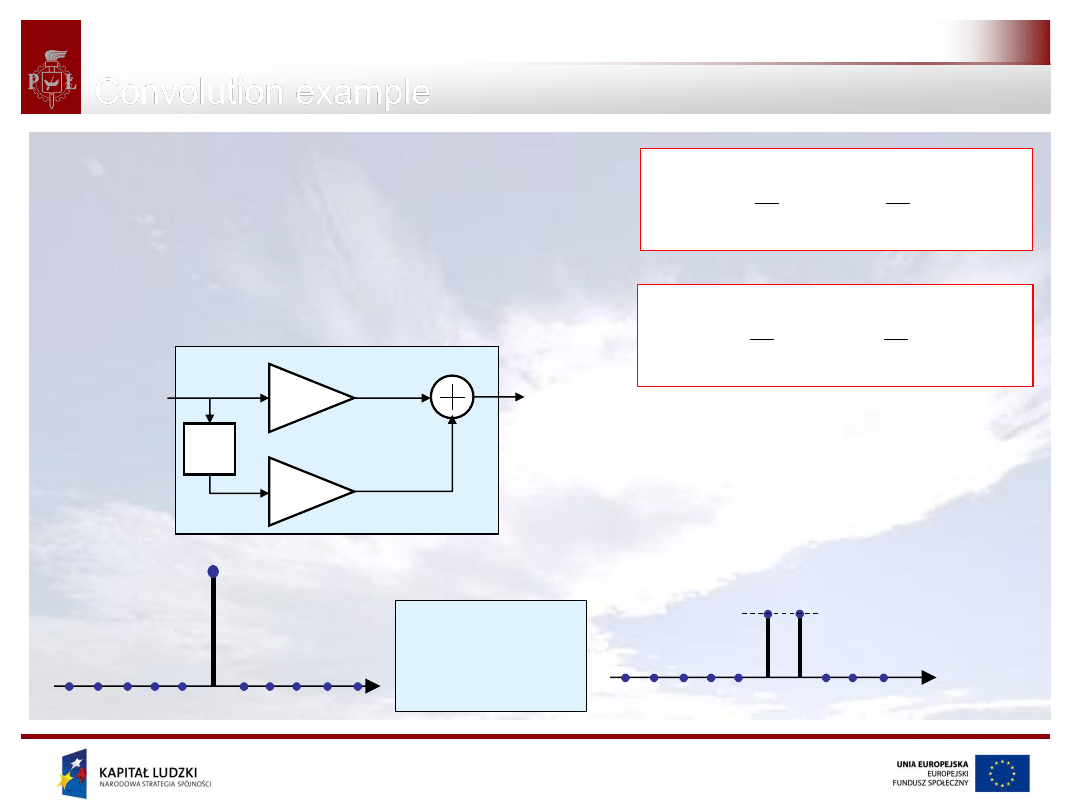
A liner system is defined by
a difference equation:
1
2
1
2
1
n
x
n
x
n
y
Impluls response of this system is:
1
2
1
2
1
n
n
n
h
h(.)
(n)
0
0
h(n)
t
1/2
1/2
x(n)
y(n)
1
1
1/2
Convolution example
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
51
Signal
Impulse response
---------------------------------
x(0)=1
h(0)=1
x(1)=0
h(1)=1
x(2)=0
h(2)=1
k
n
x
k
h
n
y
k
k
y(0) = x(0)h(0) + x(1)h(-1) + x(2)h(-2) = 1+0+0 = 1
y(1) = x(0)h(1) + x(1)h(0) + x(2)h(-1) = 1+0+0 = 1
y(2) = x(0)h(2) + x(1)h(1) + x(2)h( 0) = 1+0+0 = 1
y(3) = x(0)h(3) + x(1)h(2) + x(2)h( 1) = 0+0+0 = 0
y(4) =…………….
k
n
h
k
x
n
y
k
k
|||
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
52
Signal
Impulse response
---------------------------------
x(0)=1
h(0)=1
x(1)=1
h(1)=1
x(2)=1
h(2)=1
k
n
x
k
h
n
y
k
k
y(0) = x(0)h(0) + x(1)h(-1) + x(2)h(-2) = 1+0+0 = 1
y(1) = x(0)h(1) + x(1)h(0) + x(2)h(-1) = 1+1+0 = 2
y(2) = x(0)h(2) + x(1)h(1) + x(2)h( 0) = 1+1+1 = 3
y(3) = ……………..
y(4) =…………….
k
n
h
k
x
n
y
k
k
|||
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
53
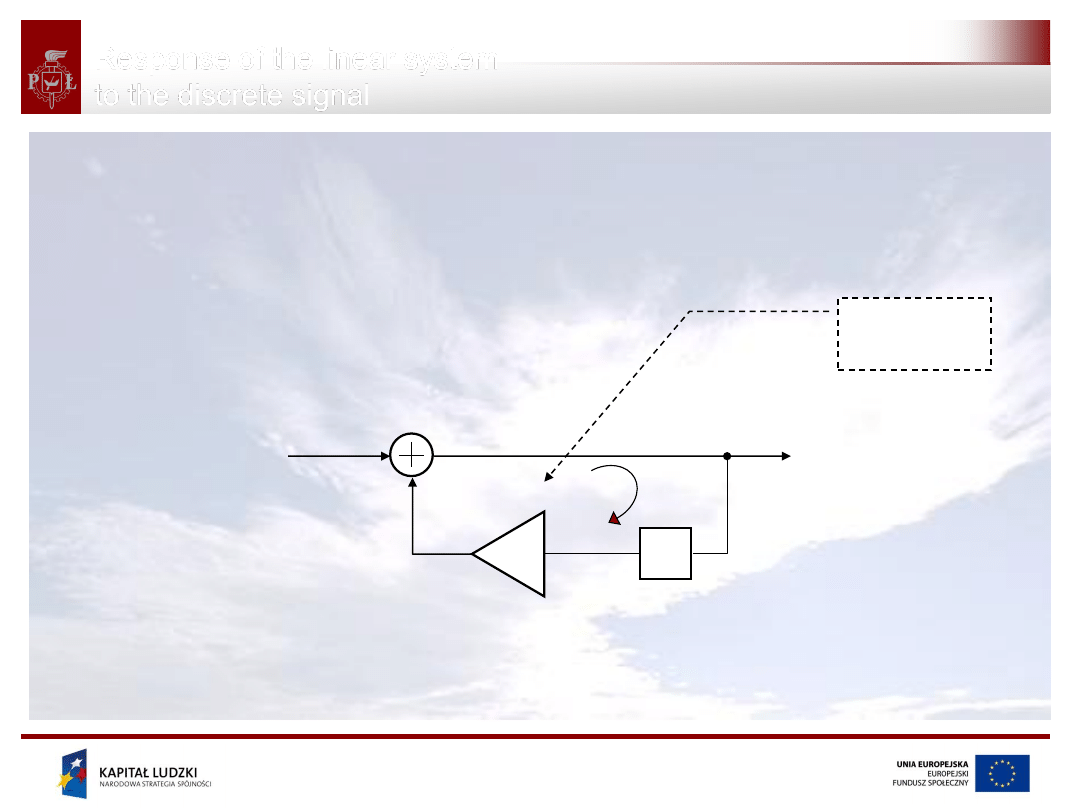
The system’s impulse response can be infinite, eg:
n
x
n
y
a
n
y
1
1
Response of the linear system
to the discrete signal
t
x(n)
y(n)
a1
y(n-1)
a
1
y(n-1)
Feedback
loop
For what values of a
1
the response of the system is bounded?
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
54
Quiz questions
1.
Any discrete time signal can be defined by?
a) a linear combination of weighted unit pulse functions
b) a linear combination of delayed unit pulse functions
c) a linear combination of unit pulse functions
d) a linear combination of delayed and weighted pulse functions
2.
The impulse response is sufficient to completely characterize?
a) a linear memoryless system
b) a linear system
c) a time invariant system
d) a linear time invariant system
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
55
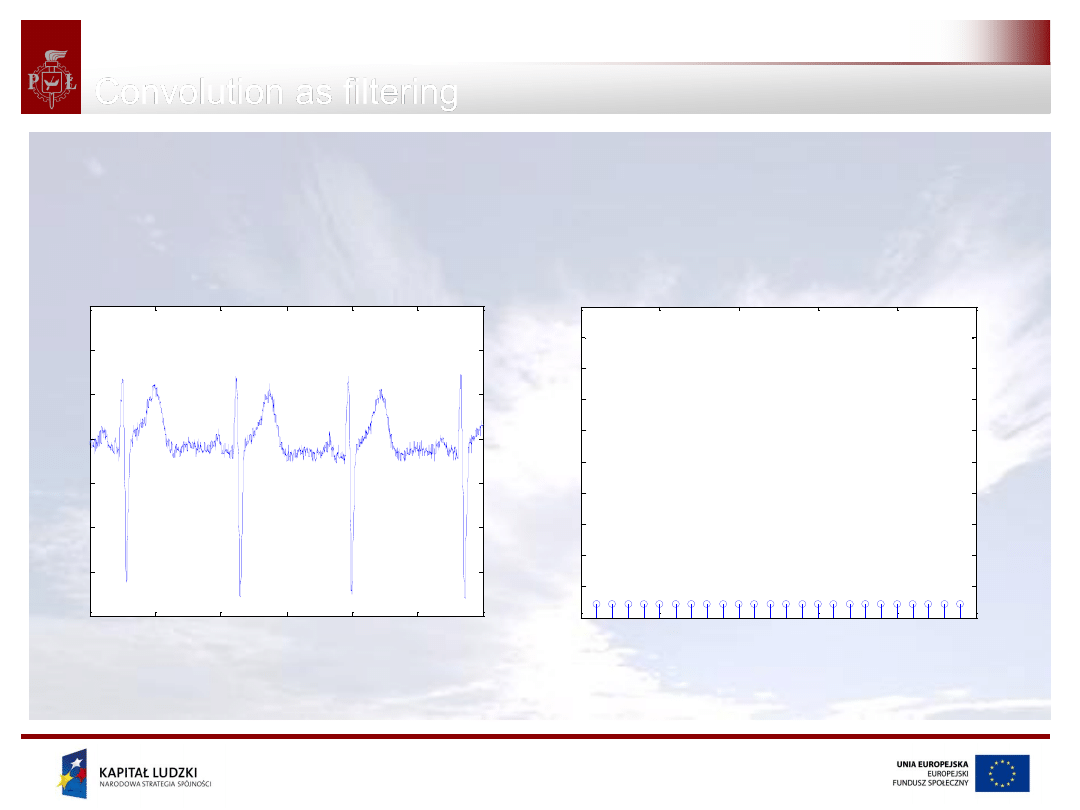
Example:
Convolve ECG signal with an impulse response:
k
n
x
n
y
k
k
23
0
24
1
24
24
1
....
24
1
24
1
24
1
24
1
n
h
Convolution as filtering
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
56
# Python (interactive mode)
from scipy.io import loadmat,savemat
ecg=loadmat('ecg_all.mat')['ecg_s'] #load ecg signal and assign to variable ecg
ecg=reshape(ecg,len(ecg)) #reshaping required for .mat files
plot(ecg)
h=1/24.*ones(24)
#define impulse response h
y=convolve(h,ecg)
#result of filtering
plot(y)
k
n
x
k
h
n
x
h
n
x
h
n
x
h
n
y
k
k
23
0
23
23
1
1
0
Convolution as filtering
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
57
0
500
1000
1500
2000
2500
3000
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0
5
10
15
20
25
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
ECG signal
Filter’s impulse response
Convolution as filtering
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
58
0
500
1000
1500
2000
2500
3000
3500
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
750
800
850
900
950
1000
1050
-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
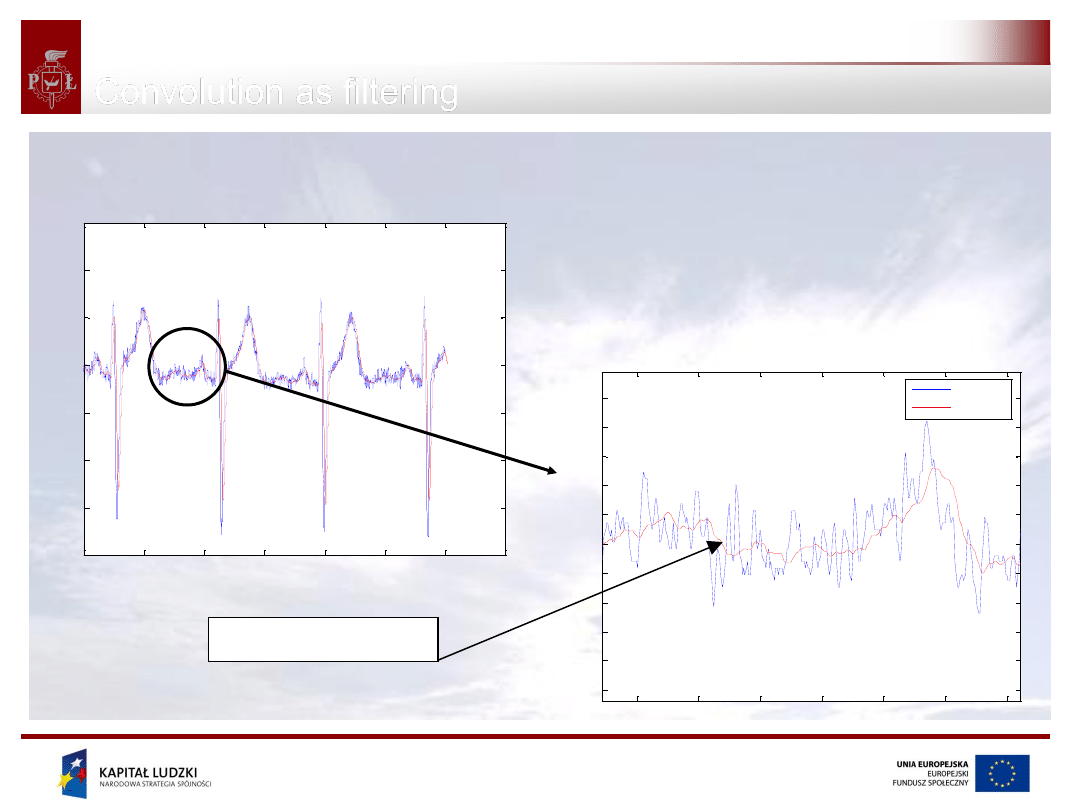
x
conv(x,h)
ECG signal
and its convolution
with h.
Convolution as filtering
Smoothing filter
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
59
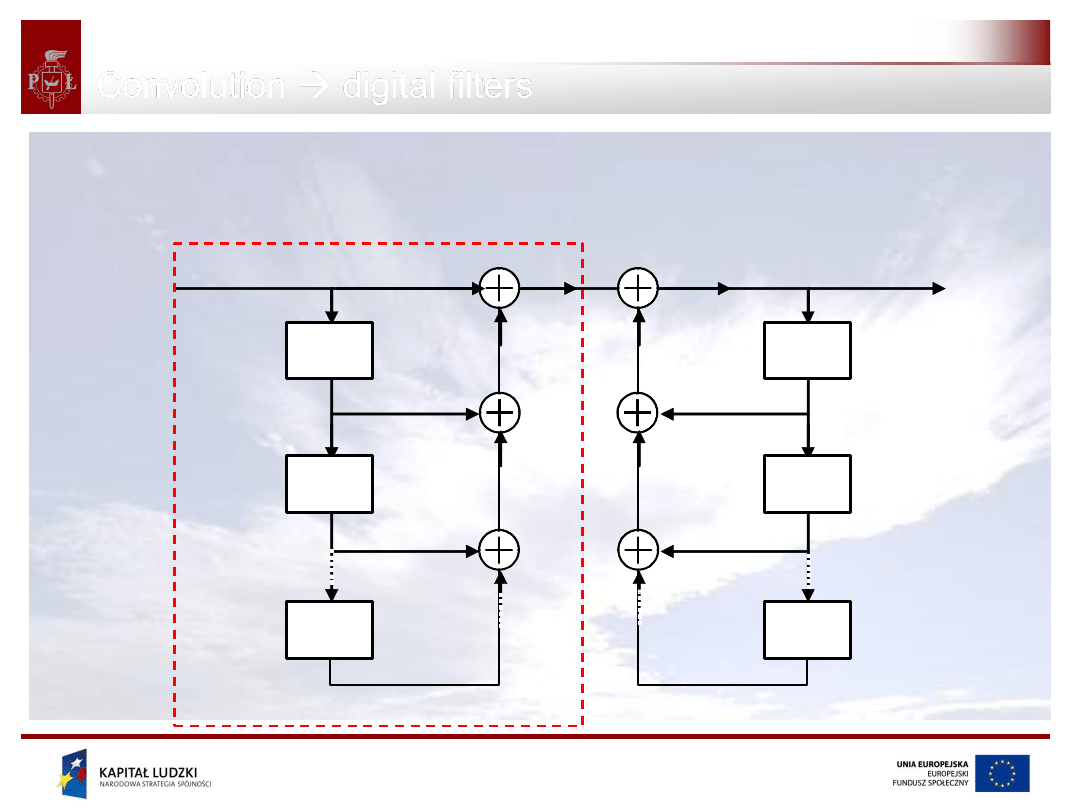
Convolution digital filters
z
-1
z
-1
z
-1
z
-1
z
-1
z
-1
b
0
x(k-1)
x(k)
x(k-M)
x(k-2)
y(k-2)
y(k-1)
y(k-N)
b
1
a
1
b
M
b
2
a
2
a
N
y(k)
Moving average
parameters
Autoregression
parameters
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Signal Processing
60
1.
Types of systems
2.
Various systems’ properties
3.
LTI systems
4.
Continous vs discrete signals
5.
Convolution
-
definition
-
calculation
-
examples - filtering
Systems and convolution - summary
Politechnika Łódzka, ul. Żeromskiego 116, 90-924 Łódź, tel. (042) 631 28 83
www.kapitalludzki.p.lodz.pl
„Innowacyjna dydaktyka bez ograniczeń - zintegrowany
rozwój Politechniki Łódzkiej - zarządzanie Uczelnią,
nowoczesna oferta edukacyjna i wzmacniania zdolności
do zatrudniania osób niepełnosprawnych”
Prezentacja multimedialna współfinansowana przez
Unię Europejską w ramach
Europejskiego Funduszu Społecznego w projekcie pt.
„SIGNAL PROCESSING”
Wyszukiwarka
Podobne podstrony:
03 system2
03 System suche mokre
03 Systemy informatyczne 1 ppt
03 System opasu bydła intensywny, ekstensywny, półintensywny
03. System podatkowy - slajdy, Teorie opodatkowania i systemy podatkowe, Teorie opodatkowania i syst
03. SYSTEM PODATKOWY teoria, Teorie opodatkowania i systemy podatkowe, Teorie opodatkowania i system
03 Systemy rolniczeid 4204 ppt
Żelbetowe wzmocnienia ścianek kolankowych M 03 9, Systemy wykończeniowe
03 systemy rachunku kosztow
21 03 System pierwszej pomocyid 29156
03 System bank hipo w POLid 450 Nieznany (2)
!03 systemy informatyczne
03 system2
teoria 03 systemy plikow NT
03 system2
1999 03 System nadzoru z kamerami przemysłowymi TV
więcej podobnych podstron