1
Pozycjonowanie dynamiczne statku – wykład
Wraz z rozwojem floty morskiej zajmującej się wydobyciem ropy
naftowej z dna morskiego, jak również
potrzeba wykonywania prac
podwodnych (dokonywanie odwiertów w dnie morskim, układanie rurociągów i
kabli na dnie morskim, prowadzenie prac z udziałem nurków, itp.) wymusiła
konieczność zapewnienia statkom zdolności precyzyjnego manewrowania, jak i
utrzymania stałej pozycji, niezależnie od prądu morskiego siły wiatru fal
morskich i innych czynników
. Pierwotnie problem ten rozwiązywano za pomocą
platform utrzymywanych na pozycji za pomocą wielu kotwic. Zapewnienie
dokładności miejsca postoju dokonywano poprzez odpowiedni naciąg
łańcuchów kotwic. Manewrowanie taką platformą było bardzo kłopotliwe, gdyż
musiało się odbywać przy pomocy holowników, które wyrywały kotwice z dna
morskiego i zrzucały je odpowiednio dalej, następnie obsługa na platformie
sterując naciągiem łańcuchów przemieszczała ją w żądanym kierunku. System
ten był szeroko używany, ale powyżej pewnej głębokości, jak i ze względu na
ukształtowanie dna, lub z uwagi na możliwość uszkodzenia urządzeń już
zainstalowanych na dnie morskim jest niemożliwy do zastosowania. W dodatku
eksploatacja tego rodzaju pozycjonowania jest bardzo droga.
Znacznie lepsze możliwości daje system dynamicznego pozycjonowania
oparty na pracy komputera, otrzymującego dane z referencji, które informują
go o każdym ruchu statku
. Referencje (od łacińskiego: referro – odnosić) są to
zewnętrzne układy odniesienia, względem, których określa się przemieszczenie
statku. Komputer informacje te otrzymuje, analizuje, porównuje z wartościami
zadanymi i odpowiednio do potrzeb steruje kierunkiem i siłą oddziaływania
sterów strumieniowych i śrub napędu głównego, przeciwstawiając się naporowi
sił zewnętrznych, tj: prądu morskiego, fal, siły wiatru itp.
Na ogół na statkach
wyposażonych w system dynamicznego pozycjonowania stosuje się układ
napędowy typu „Diesel – Electric”.
Polega on na tym ze silniki główne
napędzają prądnice wytwarzające energię elektryczną, a następnie silniki
elektryczne wprawiają w ruch stery strumieniowe. Za zastosowaniem tego typu
rozwiązania przemawia pewność działania układu, nawet w sytuacjach
wystąpienia awarii jednego lub więcej jego elementów. Na statkach tych
instaluje się zespoły prądotwórcze odpowiednio dużych mocy zdolnych do
długotrwałego zasilania wszystkich napędów na maksymalnym obciążeniu.
System ten w budowie i eksploatacji jest dość drogi, ale charakteryzuje się duża
zdolnością ruchową i bardzo dobrymi możliwościami manewrowymi.
Zaletami swoimi system dynamicznego pozycjonowania przewyższa
pozycjonowanie za pomocą kotwic, dlatego jest bardzo szeroko stosowany, a w
wielu wypadkach jest jedyną możliwością utrzymania statku na niezmiennej
pozycji.
2
1. RYS HISTORYCZNY
Dynamiczne pozycjonowanie statków jest techniką, która zaczęła
rozwijać się od wczesnych lat sześćdziesiątych. Początkowo były to
konwencjonalne statki przebudowywane do wykonania określonych zadań (tj:
odwierty, układanie kabli, itp.). Wyposażano je w dodatkowe stery
strumieniowe, a jako jedyną referencję używano
Taut Wire
. Do przetwarzania
danych otrzymanych z referencji służył analogowy komputer, którego praca
polegała na wyświetlaniu kierunku i siły oddziaływania sterów strumieniowych
sterowanych ręcznie.
Na początku lat siedemdziesiątych zastosowano komputery i dzięki temu
technika
dynamicznego
pozycjonowania
uległa
dalszemu
rozwojowi.
Zastosowano referencję hydroakustyczną HPR, wprowadzono do użytku
referencję pozycjonowania satelitarnego DGPS, referencję mikrofalową
ARTEMIS i udoskonalono referencję starego typu, jaką była Taut Wire.
Wraz z rozwojem floty pracującej przy wydobyciu ropy naftowej system
dynamicznego pozycjonowania, dla usprawnienia pracy, zmniejszenia kosztów i
czasu, jest montowany na wielu typach statków, tj: statki do zadań z udziałem
nurków, barki z dźwigami, statki do obserwacji podwodnych, statki
opuszczające roboty podwodne tzw: ROV (Remote Operated Vehicle), statki
wiertnicze, statki do kładzenia rur i kabli, pływające platformy produkcyjne, itp.
W chwili obecnej system dynamicznego pozycjonowania jest w bardzo
pewny w działaniu, charakteryzuje się prostą obsługą i małą awaryjnością.
Daje
dokładność lokalizacji i utrzymania zadanej pozycji statku z dokładnością do 1
metra.
2. PODSTAWOWE ZADANIA
SIŁY ODDZIAŁYWANIA I SWOBODNE RUCHY STATKU
Statek znajdujący się na morzu jest poddany działaniu siły wiatru, fal i prądu
morskiego.
Czynniki te w danej chwili mogą mieć różne siły i kierunki
oddziaływania. Często zmieniają swoją wartość w krótkich odstępach czasu.
Szczególnie wiatr jest czynnikiem, który zmienia się najczęściej.
Siły te
wywołują sześć ruchów swobodnych statku.
3
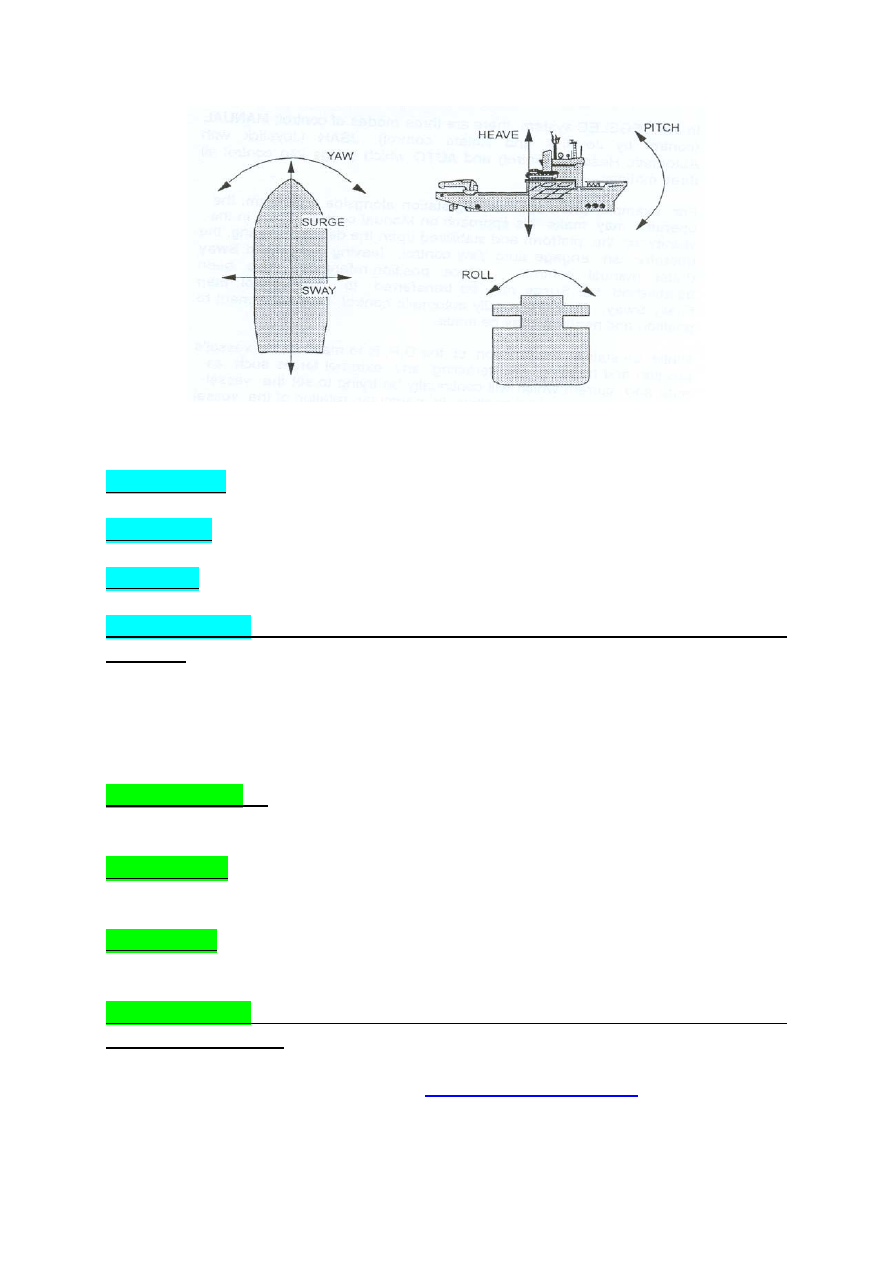
Rys. 1 - Graficzne przedstawienie ruchów swobodnych statku
Ruch SURGE (oscylacja wzdłużna) jest określany jako przesunięcie statku w
płaszczyźnie poziomej w kierunku dziobu lub rufy.
Ruch SWAY (oscylacja poprzeczna) jest określany jako przesunięcie statku w
płaszczyźnie poziomej w kierunku lewej lub prawej burty.
Ruch YAW (ruch skośny, myszkowanie) jest określany jako przesunięcie dziobu
statku w lewo lub w prawo, w płaszczyźnie poziomej.
Ruchy powyższe system dynamicznego pozycjonowania może mierzyć i nimi
sterować. Na konsoli pulpitu znajduje się przycisk przełączania z operacji
automatycznej na ręczną i odwrotnie.
Przy operowaniu automatycznym
wszystkie trzy ruchy są kontrolowane przez system
. Gdy sterowanie odbywa się
ręcznie, ruchy te są sterowane tylko za pomocą joysticka, lub z kilkoma
możliwymi opcjami, zależnymi od operatora.
Kolejne trzy ruchy swobodne statku to:
Ruch
HEAVE
(oscylacja
pionowa,
nurzanie)
jest
określany
jako
przemieszczenie się statku w płaszczyźnie pionowej równolegle w górę lub w
dół.
Ruch PITCH (kołysanie wzdłużne) jest określany jako przemieszczenie
wahadłowe rufy i dziobu statku w przeciwnych kierunkach, rufa do dołu dziób
do góry i odwrotnie.
Ruch ROLL (kołysanie poprzeczne) jest określany jako przemieszczenie
wahadłowe lewej i prawej burty statku w przeciwnych kierunkach, lewa burta na
dół prawa do góry i odwrotnie.
Ruchy powyższe system dynamicznego pozycjonowania może mierzyć, ale nie
może nimi sterować.
Ruchy PITCH i ROLL są mierzone przez VRS (Vertical Reference Sensor), a
dane są przekazywane do komputera w celu korekcji ruchów SURGE, SWAY i
YAW
. Ruch HEAVE w normalnych warunkach pracy systemu dynamicznego
pozycjonowania nie jest brany pod uwagę. Jest stale mierzony i może zostać
4
wyświetlony na żądanie operatora. W niektórych przypadkach pracy statków do
zadań specjalistycznych ma on wielkie znaczenie, np: na statkach podnoszących
przedmioty o wielkiej masie (np: Heavy Lift), lub przy opuszczaniu znacznych
ciężarów na duże głębokości (np: batyskafy, elementy instalacji podwodnych,
itp.).
Zadaniem systemu dynamicznego pozycjonowania jest
utrzymanie
zadanego kierunku dziobu i pozycji statku
podczas gdy nieprzerwanie siły
zewnętrzne, w postaci: wiatru, fal i prądu morskiego, próbują zepchnąć go
z żądanej pozycji. W szczególności siła wiatru ma silne oddziaływanie, gdyż
wywołuje obrót statku, dzięki niesymetrycznemu ukształtowaniu kadłuba, oraz
występowaniu na kadłubie elementów dużych rozmiarów, tj: nadbudówek,
masztów, dźwigów, itp.
Nastawa pozycji i kierunku dziobu jest zadawana przez operatora, a następnie
jest przetwarzana przez główny komputer systemu, by wygenerować sygnały
sterujące siłą i kierunkiem oddziaływania sterów strumieniowych i śrub
napędu głównego statku.
System dynamicznego pozycjonowania zawsze
dobiera optymalną siłę i kierunek oddziaływania każdego napędu, w zależności
ile ich ma do dyspozycji w danej chwili. Funkcja ta jest wykorzystywana w
momencie, gdy z przyczyn technicznych zostanie wyłączony jeden lub więcej
napędów, wtedy reszta napędów pracujących, automatycznie przejmie ich
zadania. Wiąże się to oczywiście z pracą silników napędów strumieniowych,
dostępnych dla systemu, na o wiele większych obciążeniach, a w sytuacjach
wyjątkowych nawet do ich przeciążenia.
Dla utrzymania właściwego zadanego kierunku dziobu system dynamicznego
pozycjonowania używa sygnału z jednego, lub więcej żyrokompasów, podczas
gdy przynajmniej jedna z referencji do utrzymania stałej pozycji ciągle
współpracuje z głównym komputerem.
Zejście statku z zadanej pozycji i
zadanego kierunku dziobu jest automatycznie wychwytywane przez system i
korygowane poprzez odpowiednie oddziaływanie sterów strumieniowych i śrub
napędu głównego.
Możliwe jest również ręczne sterowanie pozycją statku poprzez joystick
zamontowany na konsoli pulpitu. Można manewrować statkiem używając
jedynie joystick, lub za pomocą joysticka w
połączeniu z jedną lub więcej
referencji, jako sterowanie półautomatyczne.
5
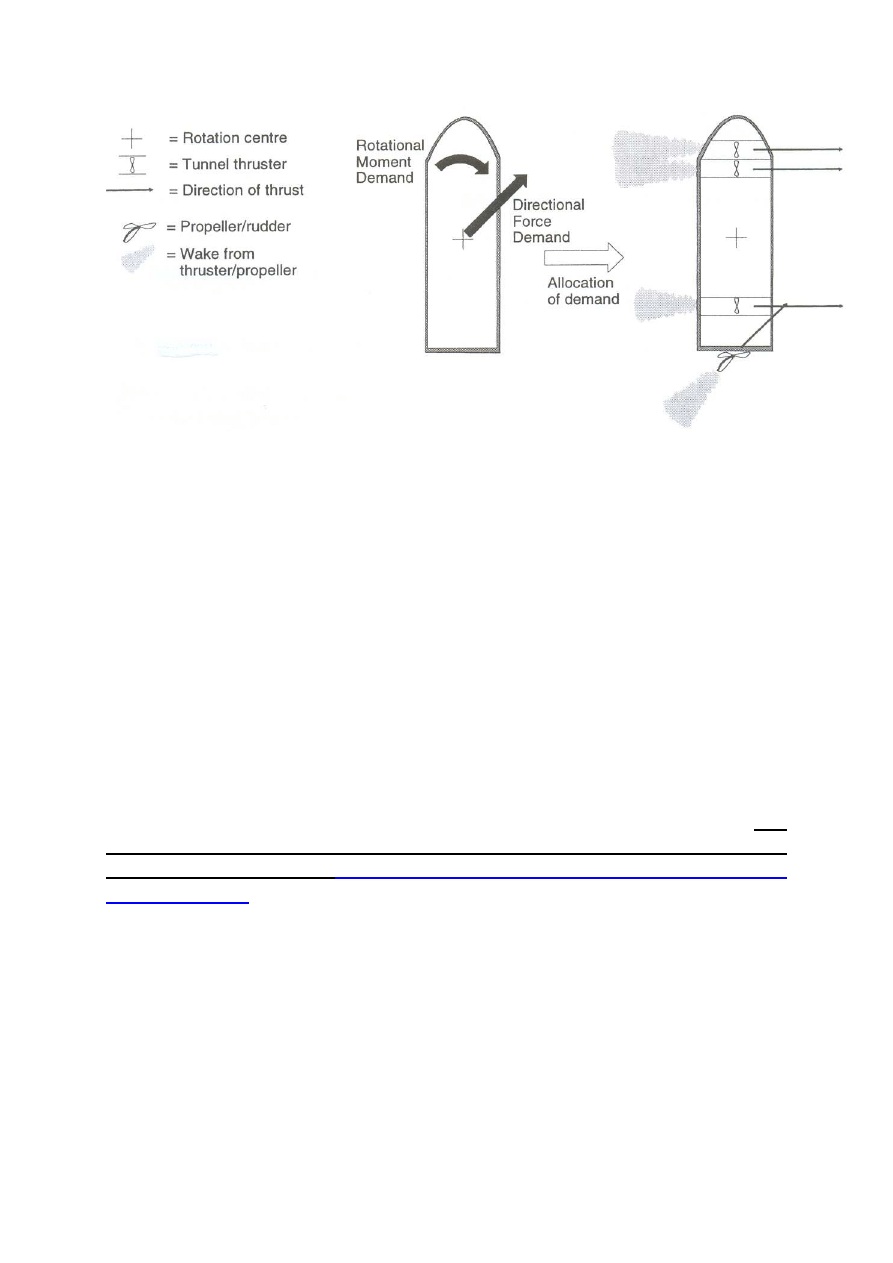
Rys. 2 – Oddziaływanie sterów strumieniowych dla kompensowania sił
zewnętrznych
Rotation centre – środek obrotu,
Tunnel thruster – tunelowy ster strumieniowy,
Direction of thrust – kierunek oddziaływania,
Propeler/ruder – śruba/płetwa steru,
Wake from thruster/propeler – ślad prądu wody wywołany pracą napędu strumieniowego,
Rotational Moment Demand – żądany momentu obrotowego,
Directional Force Demand – żądanay kierunek siły oddziaływania napędów,
Allocation of demand – żądany kierunek przemieszczenia,
System dynamicznego pozycjonowania otrzymuje właściwe dane z referencji
o zejściu statku z zadanej pozycji pod wpływem sił zewnętrznych, i wysyła
sygnały sterujące siłą i kierunkiem oddziaływania sterów strumieniowych i śrub
napędu głównego by skompensować sumę naporu sił zewnętrznych.
System dynamicznego pozycjonowania ma dwie odrębne funkcje tj:
utrzymanie stałej zadanej pozycji i utrzymanie stałego kierunku dziobu. W
przypadku utraty przez statek obu tych wartości, w pierwszej kolejności
system będzie starał się
przywrócić żądany kierunek dziobu, a następnie
żą
daną pozycję.
Dzieje się tak, dlatego że dla przywrócenia i utrzymania odpowiedniego
kierunku dziobu zapotrzebowanie na moc jest o wiele mniejsze niż do zmiany
pozycji. Gdyby statek miał wykonywać te dwa manewry jednocześnie dostępna
moc mogłaby okazać się niewystarczająca.
6
Ś
RODEK OBROTU
Dla każdego statku posiadającego zainstalowany system dynamicznego
pozycjonowania musi być określony środek obrotu (Centre of Rotation
). Jest to
dokładnie określony punkt w kadłubie statku, który podlega pozycjonowaniu.
Zazwyczaj jest to punkt leżący w osi symetrii statku na śródokręciu, lecz
również może on się znajdować w różnych miejscach w kadłubie, na różnych
typach statków. Dla statków opuszczających sprzęt z nurkami środek obrotu
wypada w studni, z której jest opuszczany. Na statkach układających rury i
kable na dnie morskim z rampą do wypuszczania zamontowaną na rufie, punkt
ten wypada w rufowej części statku. Na tankowcach z przyłączem do pobierania
ropy naftowej z platform umiejscowionym na dziobie, środek obrotu znajduje
się w dziobowej części statku. Statek może mieć jeden lub więcej środków
obrotu, w zależności, do czego jest przeznaczony i jaką pracę wykonuje. Punkt
ten każdorazowo może być wybrany przez operatora.
PODSTAWOWE MANEWRY
Za pomocą systemu dynamicznego pozycjonowania można wykonywać
statkiem wiele manewrów, ustalanych przez operatora. Rodzaj manewru zależy
od typu wykonywanego zadania. Manewrować można ręcznie, za pomocą
joysticka, lub automatycznie. Obsługa ręczna stosowana jest rzadko. Stosuje się
ją podczas wychodzenia i wchodzenia do portu lub, gdy jest konieczność
gwałtownego wykonania manewru. Na ogół stosowane jest sterowanie
automatyczne.
Aby wykonać dany manewr należy wprowadzić do głównego
komputera odpowiednie dane: żądany kierunek dziobu, żądaną pozycję,
odległość lub trasę przemieszczania się, prędkość przemieszczenia się,
dokładność utrzymania pozycji
. Powyższe dane wprowadza się do systemu
wpisując ich żądane wartości, we właściwe rubryki w oknach dialogowych,
wyświetlanych na ekranie monitora.
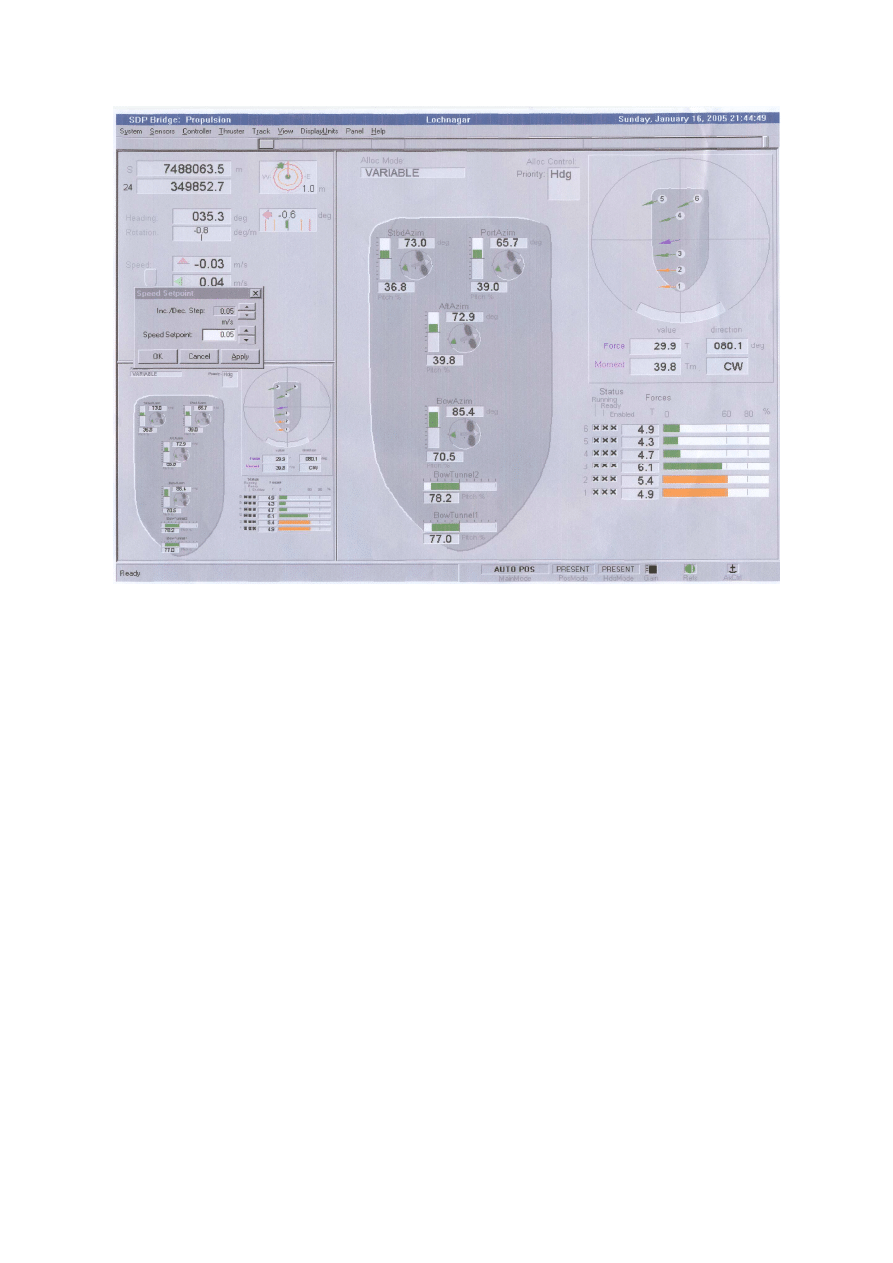
7
Rys. 3 – Przykładowe okno dialogowe w wykonaniu firmy KONSBERG
Do podstawowych manewrów należą:
-
sterowanie statkiem przy użyciu funkcji autopilota z zadaną prędkością i
kierunkiem dziobu (kursem)
-
zmiana i utrzymywanie kierunku dziobu (kursu)
-
zmiana i utrzymanie zadanej pozycji
-
przemieszczenie statku o żądaną odległość z zadaną prędkością, w każdą
stronę
-
przemieszczanie statku wzdłuż ustalonej trasy z zadaną prędkością
-
podążanie za obiektem poruszającym się pod wodą (np: ROV)
-
podążanie wzdłuż trasy wyznaczonej przez transpondery ulokowane na
dnie
Dokładność pozycji określa się w metrach, a na ekranie jest wyświetlona w
postaci okręgu otaczającego punkt, który symbolizuje środek obrotu statku
(patrz rys. 3, lewy górny róg okna dialogowego). Każde wyjście statku poza ten
obręb jest sygnalizowane operatorowi w postaci alarmu akustycznego, i
wyświetlane jest na liście alarmów.
8
3. BUDOWA SYSTEMU DYNAMICZNEGO POZYCJONOWANIA
ELEMENTY I WYPOSAŻENIE
System dynamicznego pozycjonowania zbudowany jest z sześciu odrębnych
bloków
. Poprawne działanie systemu jest uzależnione od wielu czynników
zewnętrznych wchodzących w skład wyposażenia statku, tj.: zasilanie energią
elektryczną pulpitu, poprawne działanie UPS-ów, dobry stan baterii zasilania
awaryjnego, odpowiedni zapas mocy do zasilania sterów strumieniowych, itp.
Również czynnik ludzki ma wielkie znaczenie. Załoga na mostku wykonująca
manewrowanie statkiem podczas przeprowadzania prac na morzu musi być
odpowiednio przeszkolona, od mechaników i elektroautomatyków wymaga się
znajomości budowy systemu od strony technicznej, by właściwie reagować na
niedomagania i ewentualne awarie części technicznej.
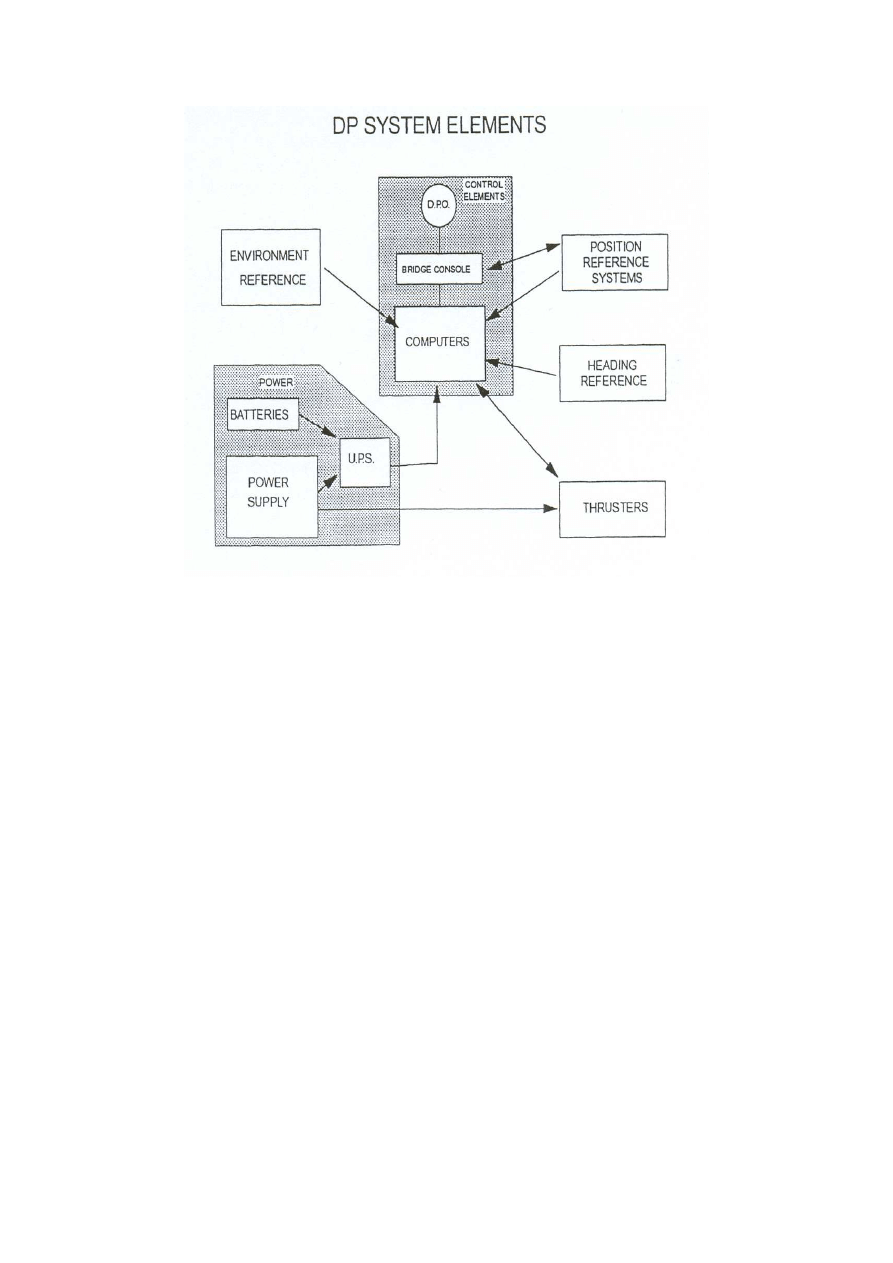
Schemat blokowy przedstawiający elementy systemu dynamicznego
pozycjonowania zawiera:
1
- blok manewrowania statkiem, (Operator, Pulpit manewrowy, Komputery)
2
- blok referencji pozycji, (DGPS, Taut Wire, Hydroakustyczna Referencja
HPR, Mikrofalowa Referencja ARTEMIS
3
- blok referencji kierunku dziobu, (Żyrokompas)
4
- blok referencji środowiska zewnętrznego i stabilności statku, (Czujniki
siły i kierunku wiatru, czujniki ruchów roll i pitch tzw. VRS)
5
- blok wytwarzania i rozdzielania energii elektrycznej, (Zespoły
prądotwórcze, Tablice rozdzielcze)
6
-blok napędów strumieniowych, (Tunelowe stery strumieniowe, Pędniki
azymutowe, Śruby napędu głównego)
9
Rys. 4 – Schemat blokowy elementów systemu dynamicznego pozycjonowania
BATTERIES
– baterie akumulatorów
BRIDGE CONSOLE
– pulpit manewrowy DP
COMPUTERS
– główne komputery
CONTROL ELEMENTS
– blok manewrowania statkiem
D.P.O.
– operator pulpitu DP
ENVIROMENT REFERENCE – blok referencji środowiska zewnętrznego
HEADING REFERENCE
– blok referencji kierunku dziobu, kursu
POSITION REFERENCE SYSTEM – blok referencji pozycji
POWER
– blok zasilania
POWER SUPPLY
– zasilanie w energię elektryczną
THRUSTERS
– blok napędów strumieniowych
U.P.S.
– urządzenie zapewniające nieprzerwane zasilanie w energię
elektryczną
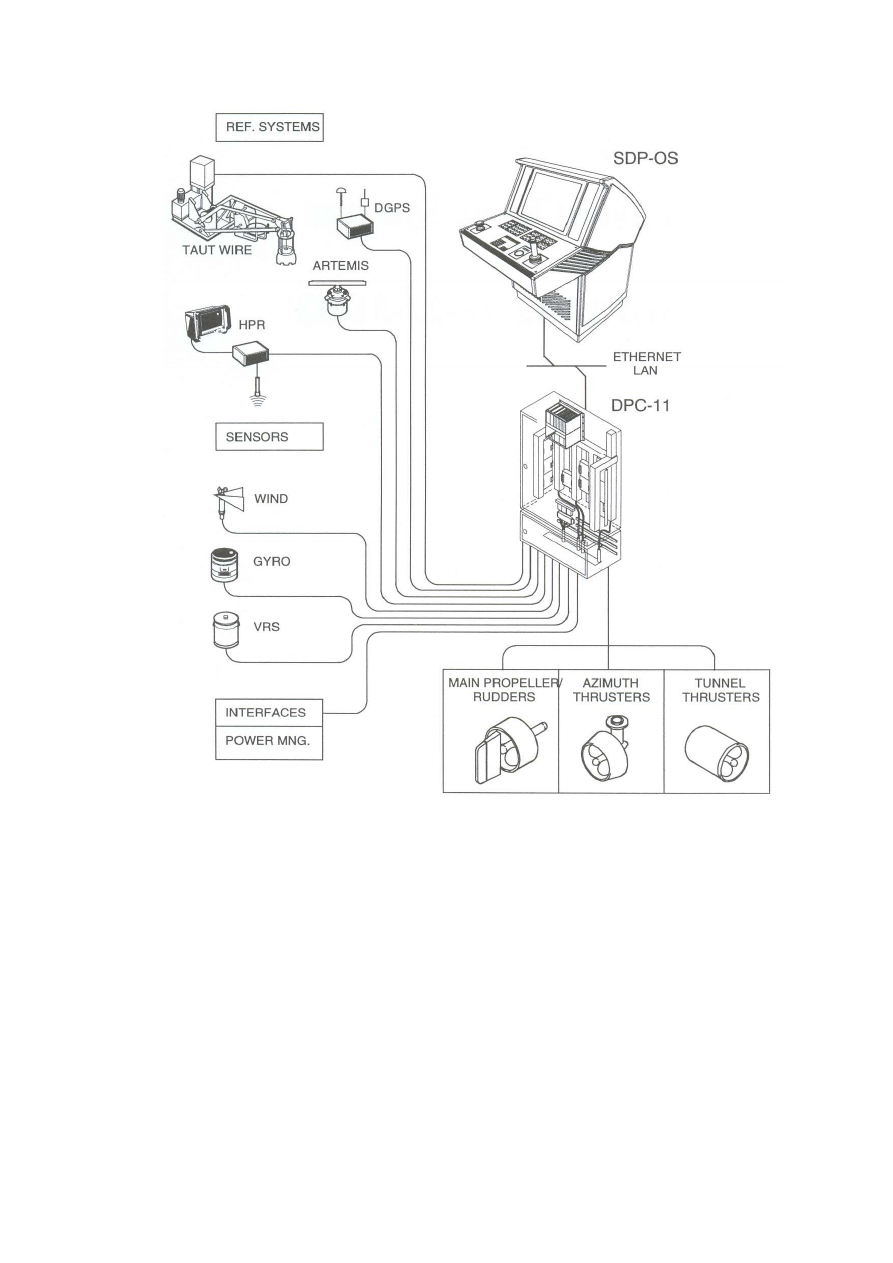
10
Rys. 5 - Rysunek poglądowy bloków, elementów i połączeń według firmy
KONGSBERG [3]
11
1.
BLOK MANEWROWANIA STATKIEM
W skład bloku manewrowania wchodzą: komputery, pulpit i człowiek
zadający określony manewr, zwany operatorem DP.
Rodzaj zainstalowanych
komputerów i oprogramowania jest zależny od zapotrzebowania na pewność
działania systemu. Na statkach, których zakłócenia poprawnej pracy systemu
dynamicznego pozycjonowania (tj: zawieszenie się programu, awaria
komputera, chwilowy brak zasilania komputera, itp.) mogą prowadzić do
ś
mierci ludzi, znacznych strat sprzętu lub opóźnień,
stosuje się systemy
podwójne a nawet potrójne.
Polega to na montowaniu kilku pulpitów, z których
każdy może pracować jako główny, a pozostałe są utrzymywane w stanie
pogotowia jako rezerwowe.
Również stosuje się dublowane referencje, np: dwa
Taut Wire, dwa DGPS, dwa lub trzy żyrokompasy
. Dokonuje się tego na
statkach wypuszczających nurków na znaczne głębokości, na statkach
wiertniczych, na platformach produkcyjnych. Dla innych typów statków, takich
jak: prowadzące obserwacje podwodne, zrzucające kamienie na dno morskie,
statki wycieczkowe, instaluje się zredukowane do minimum systemy
dynamicznego pozycjonowania, czyli pojedynczy pulpit i kilka podstawowych
referencji. Zawsze za stopniem rozbudowania systemu przemawiają względy
ekonomiczne.
W każdym systemie dynamicznego pozycjonowania zasady pracy głównego
procesora i jego współpraca z pozostałymi elementami systemu, są identyczne.
Dane wejściowe są wysyłane do głównego komputera z czujników
referencyjnych (żyrokompas, Taut Wire czujnik wiatru, VRS, itd.) i razem z
sygnałami sprzężenia zwrotnego (z sterów strumieniowych, pędników
azymutowych, śrub napędu głównego) są przetwarzane przez wiele programów
głównego komputera, a w efekcie końcowym porównywana jest pozycja zadana
z pozycją rzeczywistą. Jeśli różnica między nimi jest poza skalą dopuszczalnego
błędu system generuje odpowiednie sygnały i wysyła je do napędów, sterując
kierunkiem oraz siłą ich oddziaływania.
2.
BLOK REFERENCJI POZYCJI
Sprawnie działający system dynamicznego pozycjonowania daje dokładność
pozycji do 1 metra
. Aby tego dokonać musi współpracować z zewnętrznymi
układami odniesienia, aby miał możliwość wychwycenia nawet najmniejszego
ruchu statku. W historii rozwoju dynamicznego pozycjonowania stosowane było
wiele referencji pozycji, w sumie około 40. W chwili obecnej dopracowane i
najczęściej używane są cztery: Taut Wire, Hydroakustyczna referencja HPR,
DGPS i Mikrofalowa referencja ARTEMIS.
12
Taut Wire
Referencja Taut Wire
składa się z windy zamontowanej na burcie statku,
mającej ramie wysuwane poza jego obrys. Na końcu ramienia znajduje się
bloczek, po którym opuszcza się na ciężarek dno morskie. Gdy osiądzie on na
dnie winda podciąga stalową linkę, lecz nie unosi ciężarka z dna. Specjalnej
konstrukcji silnik elektryczny utrzymuje stały naciąg linki, niezależnie od
wysokości fali. Na końcu ramienia windy zainstalowane są dwa czujniki,
ustawione względem siebie pod kątem 90º, wychwytujące zmiany położenia
linki. Stałość pozycji odczytuje się z kąta, jaki tworzy linka względem pionu, i z
głębokości wody.
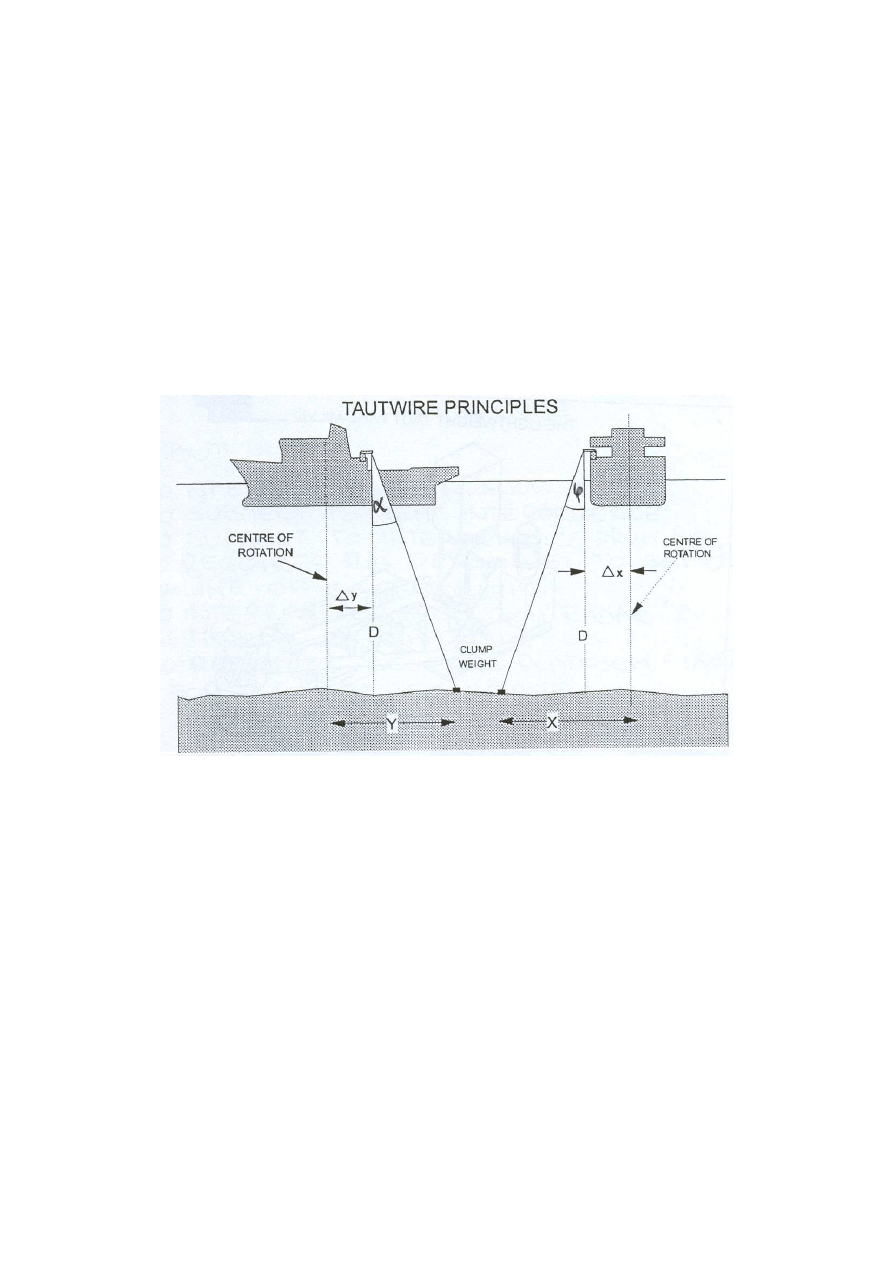
Rys. 6 – Poglądowe zilustrowanie referencji Taut Wire
Typowym przykładem tego typu referencji jest produkt firmy SIMRAD,
zwany ,,Simrad Albatross Light Weight Taut Wire Mark VIII”. W wykonaniu
tym ciężarek ma masę 350 kilogramów, na szpuli nawinięte jest 500 metrów
linki stalowej o grubości 5 milimetrów, maksymalny kąt linki względem pionu
wynosi 35º w każdą stronę, maksymalna głębokość wody, do której może być
używany to 350 metrów. Szafka sterownicza, szpula, napęd i ramię tworzy
zwartą konstrukcję, montuje się go na pokładzie przy burcie statku. Gdy Taut
Wire nie pracuje ramię jest złożone i przyjmuje pozycje pionową.
Przemieszczenia statku w każdą stronę odczytywane są z czujników
położenia linki. Mierzona jest każda zmiana kąta, jaki tworzy linka stalowa z
kierunkiem pionowym
. Wielkości zmiany kątów
α
i
ϕ
(rys 6) są wysyłane do
systemu, lecz przed podaniem ich jako dane do głównego komputera trzeba
dokonać ich korekty ze względu na ruchy roll i pitch
, jakie wykonuje statek.

13
Przez występowanie powyższych ruchów zmienia się także kąt linki, ale statek
w rzeczywistości się nie przemieszcza. Informacje o ruchach roll i pitch brane
są z referencji VRS.
Dopiero po korekcie dane z czujników Taut Wire są
kierowane do systemu i przetwarzane do utrzymania zadanej pozycji.
Referencja Taut Wire jest używana, gdy statek utrzymuje się na pozycji lub
gdy porusza się bardzo wolno, dlatego nie ma możliwości stosowania go przy
pracach podwodnych z udziałem ROV. Po zamierzonym przemieszczeniu statku
gdy kąt linki względem pionu osiągnie 35º istnieje konieczność uniesienia
ciężarka i ponownego położenia go na dnie. Po przekroczeniu tego kąta jest
możliwość przesuwania ciężarka po dnie morskim, co dawałoby przekłamania i
błędne dane do systemu. Nie może być stosowany na głębokich wodach,
poprawność działania jest ograniczona do 350 metrów.
Często na statkach wyposażonych w system dynamicznego pozycjonowania
instaluje się dwie referencje Taut Wire, po jednej na każdej z burt. Każdorazowo
operator może wybrać, którą z nich aktualnie używa, przy pracach
wymagających bardzo dużej dokładności pozycji włącza się do pracy obydwa.
Zazwyczaj Taut Wire instaluje się przy burcie statku możliwie blisko połowy
długości kadłuba statku w celu maksymalnego wyeliminowania oscylacji
ruchów kadłuba wywołanych ruchem swobodnym pitch.
Do sprawnej pracy Taut Wire wymaga ciągłego zasilania w energię
elektryczną i w sprężone powietrze. W porównaniu z innymi referencjami
pochłania dużą ilość energii elektrycznej. Nie wymaga stosowania UPS-ów,
zasilanie jest podłączone bezpośrednio do głównej tablicy rozdzielczej.
Rodzaj referencji typu Taut Wire jest wyjątkowo dokładny i sprawny w
działaniu, ale wymaga ciągłej konserwacji i przeglądów.
Statkowi mechanicy i
elektroautomatycy są w stanie utrzymać go w dobrym stanie technicznym
. W
zapasie musi być kilka ciężarków, a postrzępiona linka stalowa musi być
wymieniona. Żeby zapobiec strzępieniu się liny zaleca się jej skracanie od
strony ciężarka o około 10 metrów po każdych kilku tygodniach pracy.
Powoduje to zmianę miejsca przylegania linki do rolki na końcu ramienia i
odnawia połączenie linki z ciężarkiem.
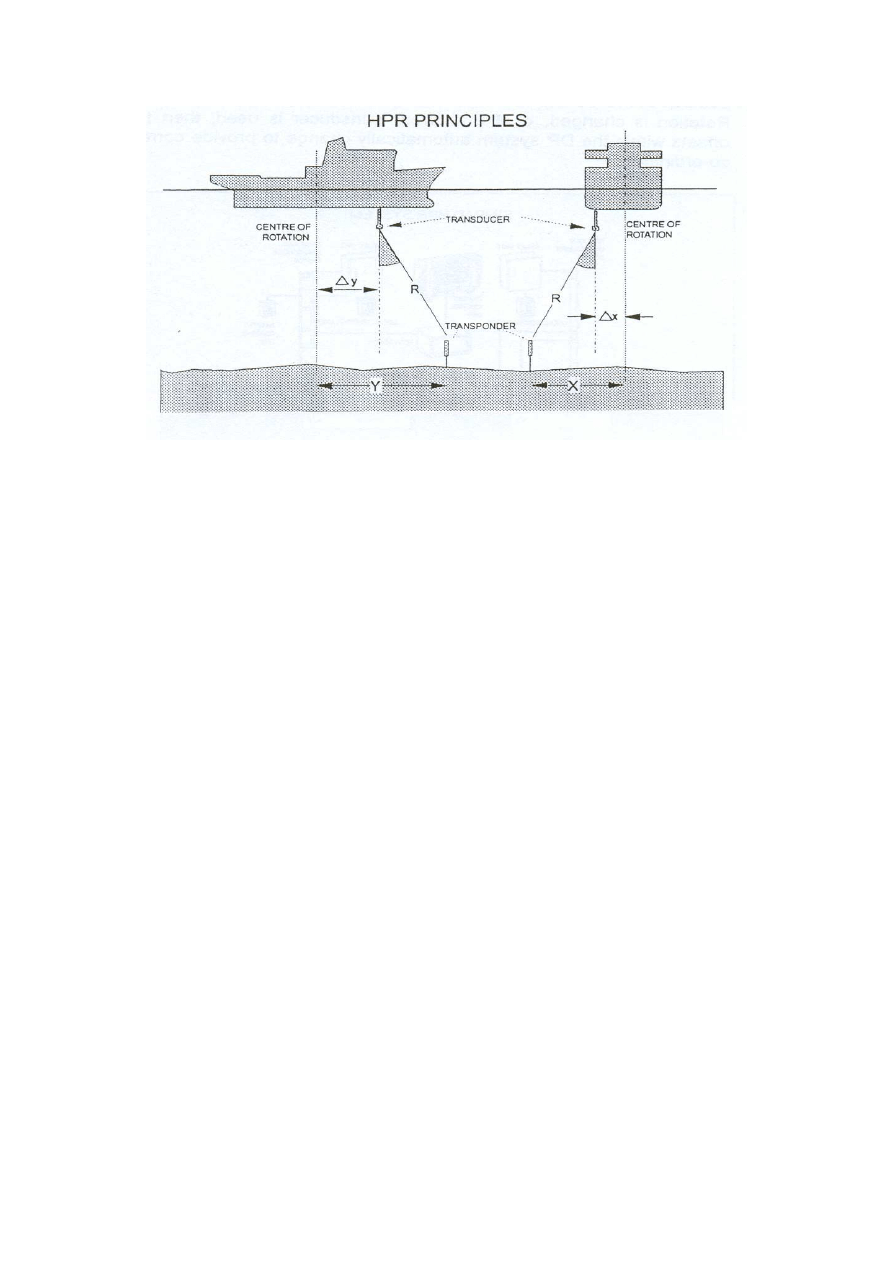
Hydroakustyczna referencja HPR (Hydro-acustic Position Reference)
System referencji hydroakustycznej HPR składa się z transducerów
umiejscowionych w dnie statku i transponderów lokowanych na dnie morskim.
Sygnał akustyczny jest emitowany z transducerów i po dotarciu do
transpondera natychmiastowo jest wysyłany z powrotem do transducerów. Po
otrzymaniu sygnału powrotnego system dynamicznego pozycjonowania jest w
stanie określić kierunek i odległość statku od transpondera, który jest dla niego
układem odniesienia, dla określenia jego pozycji i ewentualnych przemieszczeń.
14
Rys. 7 – Poglądowe zilunstrowanie referencji HPR [1]
Typowy system referencji HPR pracuje na częstotliwości 20 – 40 KHz i ma
do dyspozycji 16 kanałów komunikacyjnych. Referencja HPR posiada dwa
transducery, po lewej i prawej burcie, zamontowane w specjalnych przedziałach
wodoszczelnych. Wysuwane są zdalnie z pulpitu operatora, z dna statku przez
siłowniki elektryczne, na odległość około czterech metrów.
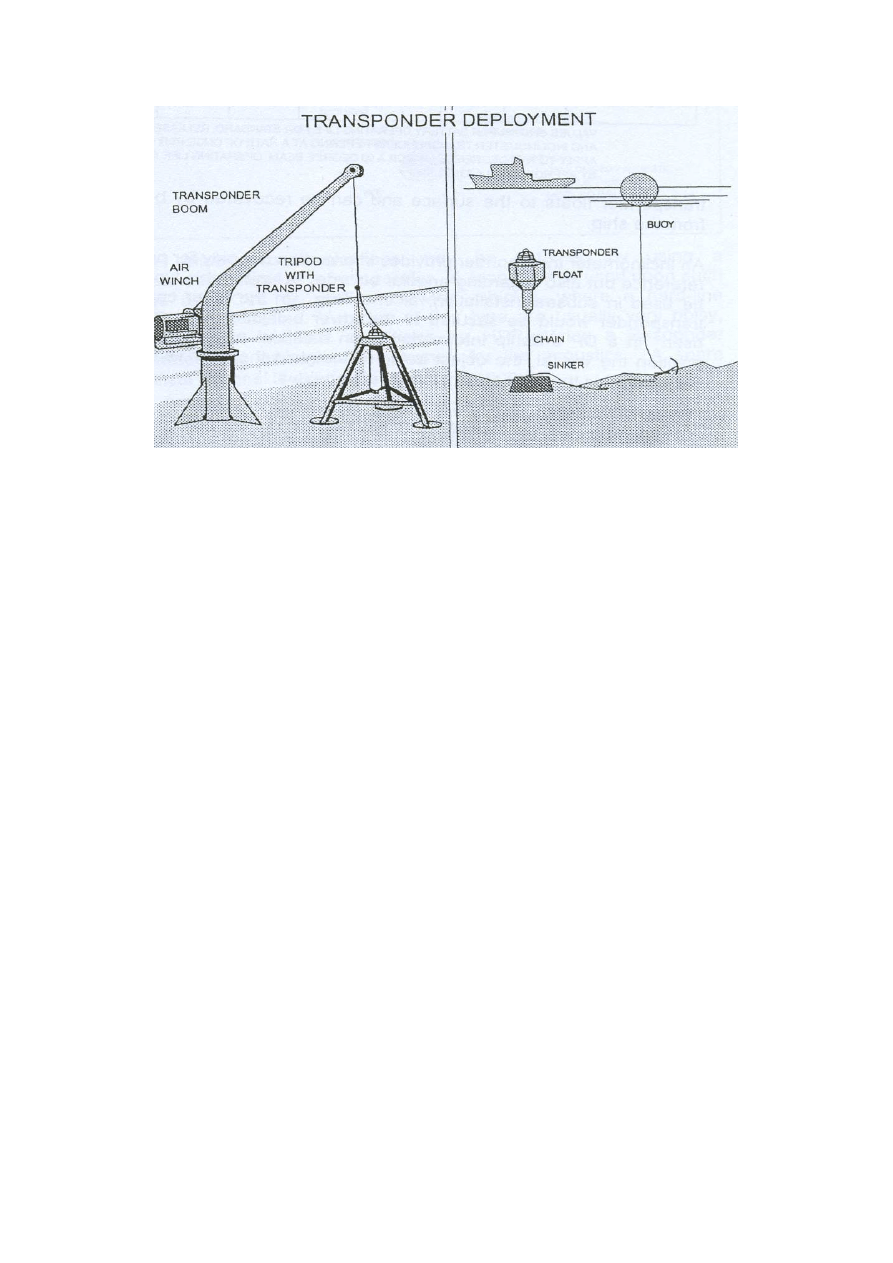
Transpondery lokowane są na dnie za pomocą specjalnej windy lub przez
asystujący statek pomocniczy. W danej chwili w użytku może być jeden, kilka a
nawet kilkanaście transponderów. Pojedynczy transponder ustawiony na dnie
jest układem odniesienia dla statku który stoi w miejscu lub porusza się bardzo
wolno. Ustawienie w odpowiedniej odległości od siebie kilku transponderów
wytycza trasę przemieszczania się statku. Każdy z nich ma swój adres i jest
identyfikowany
przez
system
dynamicznego
pozycjonowania.
Przed
rozpoczęciem zadania należy wprowadzić do systemu adres każdego z
transponderów.
Zazwyczaj transponder ma kształt rury o średnicy około 15 centymetrów i
długości około 1 metra. Wyposażony jest w ciężarek przytwierdzający go
stabilnie do dna morskiego, łańcuch o długości 2 metrów, i w górnej części ma
element wypornościowy, który ma za zadanie utrzymywać go w toni morskiej w
pozycji pionowej.
15
Rys. 8 – Winda transpondera i sposób ulokowania na dnie [1]
Działanie referencji HPR polega na wysyłaniu fal akustycznych przez
transducery
w
toń
morską.
Transpondery
po
otrzymaniu
sygnału
natychmiastowo emitują sygnał powrotny. Zwłoka czasowa sygnału powrotnego
jest proporcjonalna do odległości statku od transpondera. Z danych powyższych
jest odczytywany kierunek i kąt, jaki tworzą względem siebie nadajnik i
odbiornik w odniesieniu do pionu.
Wskazania powyższe zanim trafią jako dane
do systemu muszą zostać poddane korekcji ze względu na ruchy roll i pitch
jakie wykonuje statek, odczytane z referencji VRS
. W korekcie również musi
zostać uwzględniona odległość między transducerem a środkiem obrotu.
Dopiero dane w tej postaci kierowane są do głównego komputera, a tam są
porównywane z innymi referencjami, następnie system dynamicznego
pozycjonowania po skalkulowaniu danych wysyła odpowiedni sygnał,
kontrolujący oddziaływanie siłą i kierunkiem sterów strumieniowych.
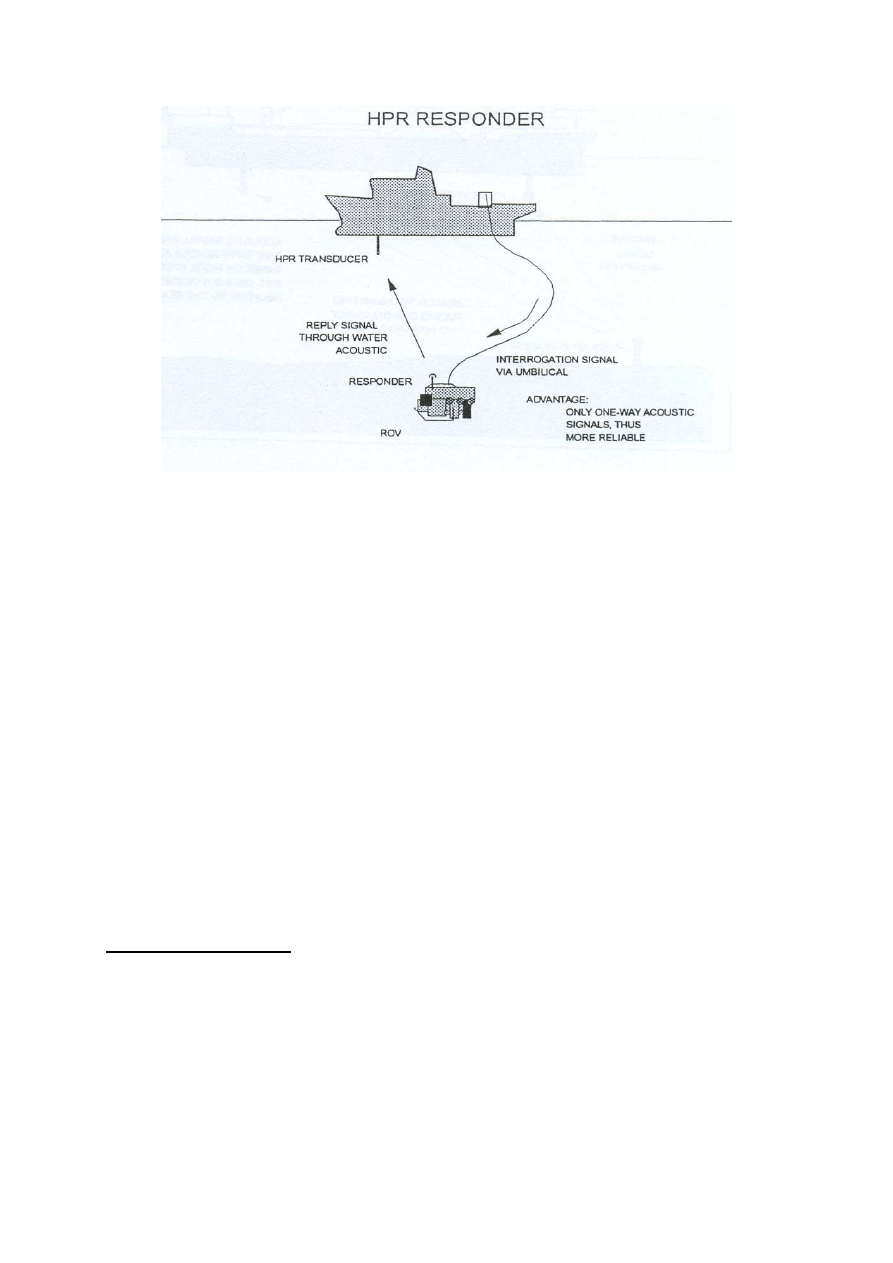
Referencja HPR jest ogólnie stosowana do określenia pozycji statku, do
wytyczenia trasy przemieszczania się statku, do lokalizacji urządzeń
zainstalowanych na dnie morskim, (studnie ujęcia ropy naftowej, trasa
przebiegu rurociągu, itp.), a także do podążania za robotem do przeprowadzania
prac podwodnych ROV.
W nowszych rozwiązaniach ten rodzaj referencji zwany jest HiPAP
(High
Precision Acustic Positioning). Zasada działania jest identyczna, ale jest
technologicznie doskonalsza, wykazuje się mniejszą awaryjnością i ma zdolność
dokładniejszego określania przemieszczeń statku.
16
Rys. 9 – Zobrazowanie podążania statku za transponderem umieszczonym na
robocie do zadań podwodnych ROV [1]
System referencji HPR jest szeroko stosowany i do jego niewątpliwych zalet
należy: bardzo dokładne określanie pozycji statku, możliwość podążania za
robotem w toni morskiej, możliwość identyfikowania obiektów na dnie morza.
Pomimo szeregu zalet system ten posiada wiele wad: jest czuły na zakłócenia
sygnału wywołane pracą sterów strumieniowych, reaguje również na operujące
w pobliżu statki i platformy, zakłócenia pracy systemu wywołuje wydychany
przez nurków gaz, ograniczona żywotność baterii transponderów, limitowana
głębokość i obszar pracy.
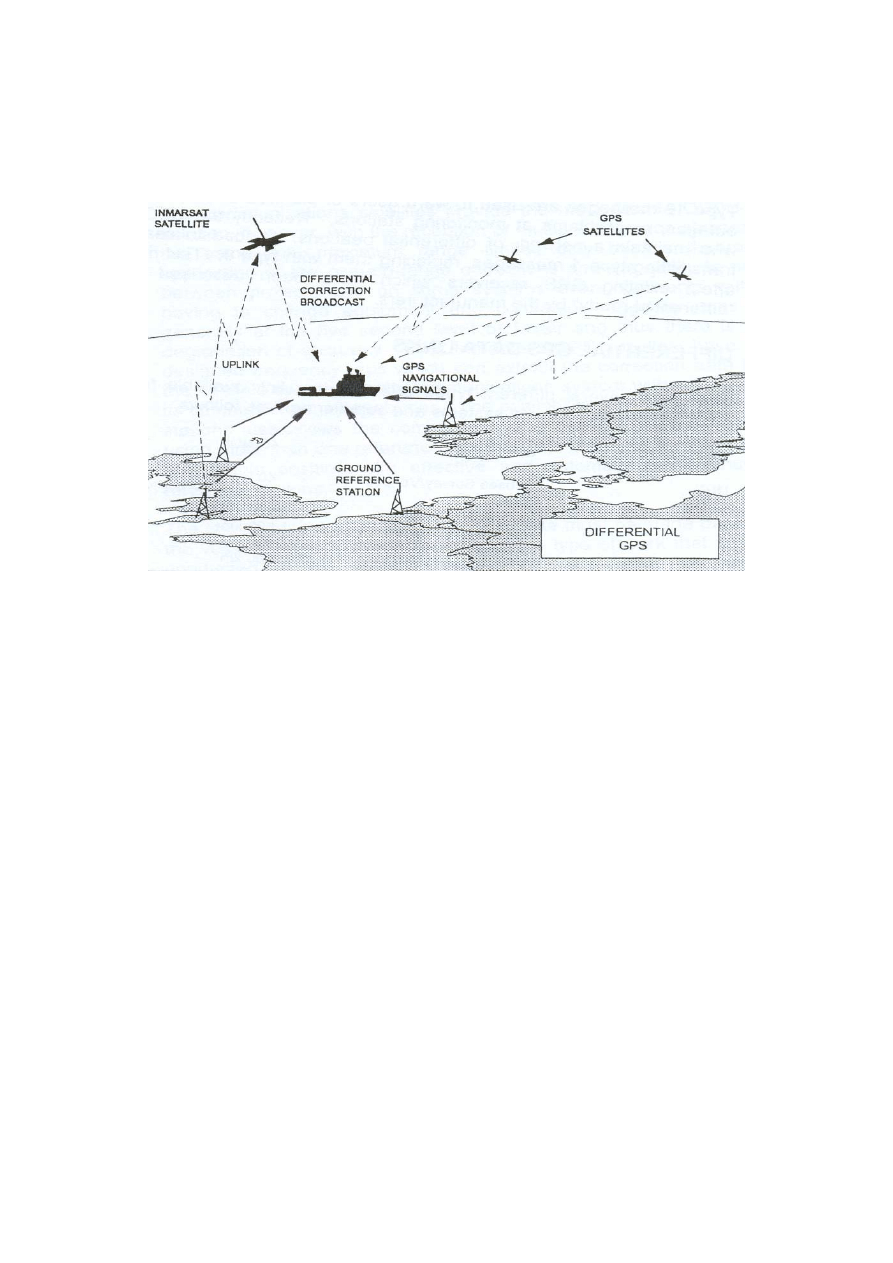
DGPS (Differental Global Positioning System)
Tradycyjny system nawigacji satelitarnej GPS składa się z trzech
zasadniczych segmentów: segment przestrzeni, segment kontroli i sterowania
sygnałem i segment użytkownika.
Segment przestrzeni posiada w kosmosie, w odległości 20000 kilometrów od
Ziemi, układ 21 satelitów, umiejscowionych na 6 orbitach. Pracuje na dwóch
zakresach częstotliwości: 1575,42 MHz (częstotliwość L1) i 1227, 60 MHz
(częstotliwość L2). Wszystkie satelity pracują na obu tych zakresach, przy czym
częstotliwość L1 jest udostępniona do użytku cywilnego tzw: SPS (Standard
Positioning Service) i daje dokładność pozycji do około 100 metrów, a
częstotliwość L2 jest używana do celów militarnych tzw: PPS, (Precise
Positioning Service) i zapewnia dokładność wskazania pozycji do około 20
metrów.
17
Segment kontroli i sterowania sygnałem posiada wiele naziemnych stacji
monitorowania systemu GPS, rozmieszczonych na całym świecie. Stacje te
ś
ledzą wszystkie satelity, badają ich odległość od Ziemi, pilnują właściwego
utrzymywania się ich na określonych orbitach, i przekazują dane do centrum
kontroli systemu GPS. Dane powyższe są odpowiednio przetwarzane i
transmitowane z powrotem do satelitów wraz z sygnałami częstotliwości L1 i
L2 wykorzystywanymi do określania pozycji.
Segment użytkownika jest nim odbiornik GPS. Typowy odbiornik pracuje na
czterech kanałach i ma zdolność przetwarzania danych z ograniczeniem do
określenia pozycji i czasu. Do właściwej pracy odbiornika potrzebna jest
komunikacja z kilkoma satelitami, zazwyczaj w granicach od 5 do 9.
Wielkości, które służą do określenia pozycji to w rzeczywistości czasy
trwania transmisji fal radiowych pomiędzy satelitami a poruszającym się
odbiornikiem GPS. Czasy te są mierzone osobno dla każdego satelity, którą
odbiornik może w przestrzeni namierzyć. Następnie każdy z osobna jest
przeliczany na odległość w metrach. W efekcie linie odległości satelitów od
odbiornika GPS dają kształt ostrosłupa, po przeliczeniu jego wymiarów
wierzchołek ostrosłupa jest lokalizacją odbiornika, czyli pozycją statku.
Pomimo powszechnej dostępności systemu GPS nie może on być stosowany
jako referencja współpracująca z systemem dynamicznego pozycjonowania,
gdyż nawet na zakresie częstotliwości L2 daje zbyt małą dokładność pozycji.
Ż
eby temu zaradzić skonstruowano system DGPS. Wykorzystuje on do pracy
tradycyjny GPS, a dodatkowo otrzymuje sygnały ze stacji naziemnych, których
globalna pozycja jest dokładnie znana. Stacje te, nazywane stacjami
różnicowymi, opracowują poprawki na podstawie porównania znanej dokładnie
pozycji własnej z pozycją satelitarną. Następnie stacje transmitują tak
opracowane poprawki różnicowe (PRC – Pseudorange Correction) do
odbiornika pokładowego w formie umożliwiającej korektę współrzędnych
pozycji określonych przez GPS. Po otrzymaniu powyższych danych system
DGPS odpowiednio je przelicza i wprowadza korekty do wskazań GPS, dla
wyznaczenia dokładnej pozycji statku, w granicy błędu od 1 do 3 metrów.
Sygnał korekty ze stacji naziemnych może być transmitowany za pomocą
radiowych fal krótkich wielkiej lub średniej częstotliwości, radiowych fal
długich niskiej częstotliwości i również poprzez ogólnoświatową komunikację
satelitarną INMARSAT. Zawsze o wyborze sposobu odbierania sygnałów
korekcyjnych decyduje odległość statku od najbliższych stacji naziemnych
systemu DGPS. Najdokładniejsze wskazanie pozycji daje używanie fal
radiowych wielkiej częstotliwości, ale zakres ich stosowania jest ograniczony do
70 kilometrów.
Po dokładnym określeniu lokalizacji statku referencja DGPS wysyła
odpowiednie
dane
do
głównego
komputera
systemu
dynamicznego
pozycjonowania, tam są one przetwarzane, porównywane ze wskazaniami
18
innych referencji i są brane pod uwagę podczas analizowania przez system
różnicy wskazań między pozycją zadaną a rzeczywistą pozycją statku.
Rys. 10 – Poglądowy szkic działania systemu DGPS [1]
Po dokładnym określeniu lokalizacji statku referencja DGPS wysyła
odpowiednie
dane
do
głównego
komputera
systemu
dynamicznego
pozycjonowania, tam są one przetwarzane, porównywane ze wskazaniami
innych referencji i są brane pod uwagę podczas analizowania przez system
różnicy wskazań między pozycją zadaną a rzeczywistą pozycją statku.
System DGPS sprawdza się najlepiej na otwartym morzu. Sygnał korekty ze
stacji naziemnych może zostać zakłócony, gdy statek pracuje w pobliżu
platformy. Zalecane jest instalowanie anten odbiorników sygnału DGPS na
możliwie najwyższym punkcie statku. Zazwyczaj instaluje się na statkach dwa
niezależne systemy DGPS, zasilane z dwóch osobnych UPS-ów. Każdy z
zamontowanych systemów DGPS pracuje jako osobna referencja.
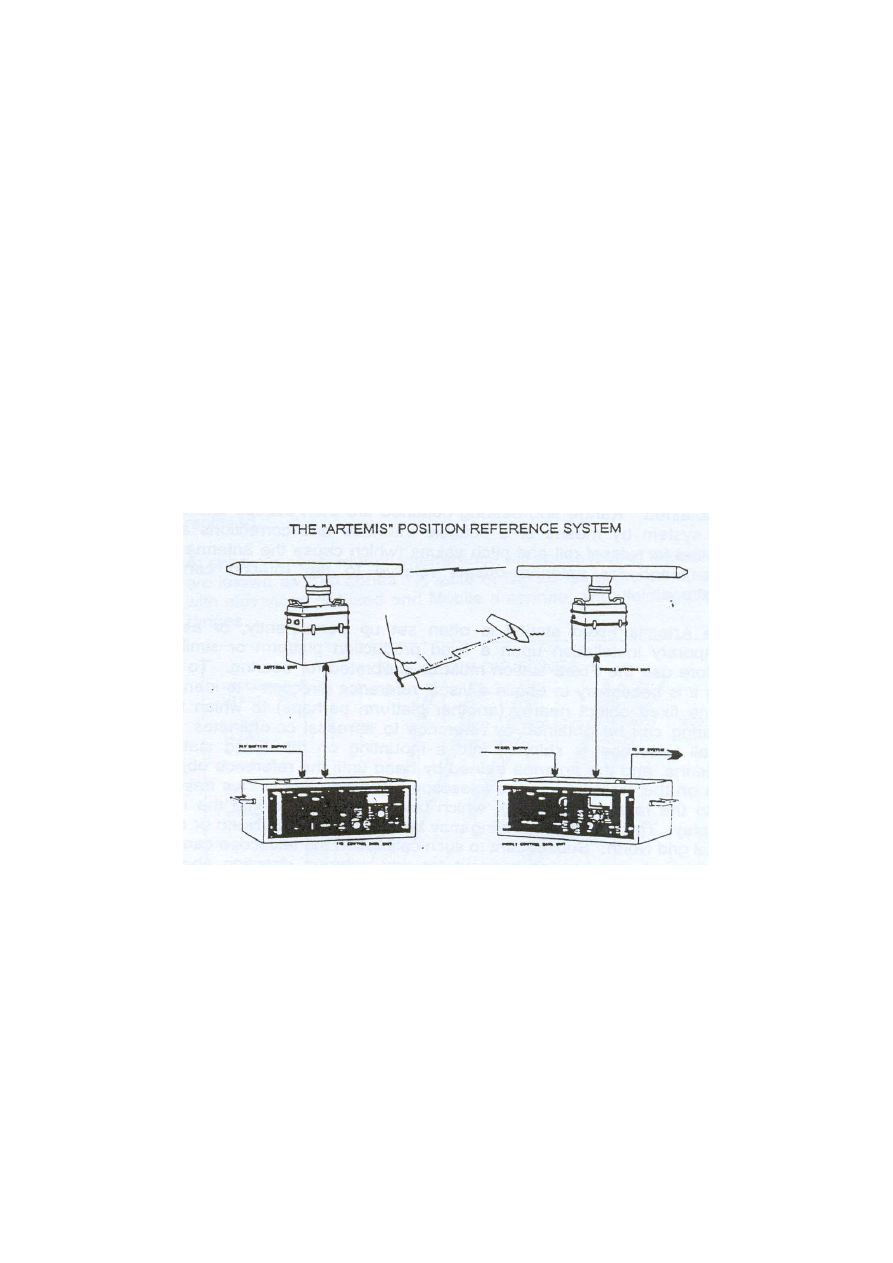
Mikrofalowa referencja ARTEMIS
W skład mikrofalowej referencji ARTEMIS wchodzą dwie stacje. Jedna jest
stale zamontowana na statku zazwyczaj na najwyższym maszcie, a druga jest
stacja przenośną montowaną czasowo na brzegu, platformie lub innym obiekcie
względem, którego ma być określane przemieszczenie statku
. Działanie polega
na transmisji mikrofal pomiędzy tymi stacjami. Stacja przenośna jest traktowana
jako nieruchoma, a stacja zamontowana na statku jako poruszająca się. Żeby
19
referencja ARTEMIS rozpoczęła pracę stacje te muszą być ustawione w pewnej
odległości od siebie, i za pomocą funkcji wyszukiwania znajdują się nawzajem i
ustawiają nadajniki równolegle względem siebie. Stacja ruchoma wysyła sygnał
mikrofalowy, zostaje on odebrany przez stacje nieruchomą, która natychmiast
sygnał ten retransmituje do stacji ruchomej. Dla określenia odległości między
nadajnikami zlicza się czas transmisji fal, który jest proporcjonalny do
odległości. Przemieszczenie się statku na boki jest odczytywane z kąta
ustawienia nadajnika stacji nieruchomej. Wielkość ta jest wysyłana do stacji
ruchomej razem z retransmisją fal. Dane z referencji ARTEMIS trafiają do
głównego komputera systemu dynamicznej pozycji, lecz zanim dotrą jako dane
do analizy przez system musza zostać poddane korekcji, ze względu na ruchy
roll i pitch jakie wykonuje statek, odczytane z referencji VRS. Następnie dane te
są odpowiednio przeliczane, porównywane ze wskazaniami innych referencji i
uwzględniane przez system dynamicznego pozycjonowania przy korekcie
różnicy rzeczywistej pozycji statku w odniesieniu do pozycji zadanej.
Rys. 11 – Elementy wyposażenia referencji ARTEMIS [1]
Referencja ARTEMIS pracuje na falach radiowych o częstotliwości 9GHz.
Maksymalny zasięg pracy wynosi 30 kilometrów, lecz do celów współpracy z
systemem dynamicznego pozycjonowania nie przekracza się dystansu 5
kilometrów
. Referencja ta jest bardzo dokładna, jest zdolna wychwycić
przemieszczenie statku na odległości pomiędzy stacją nieruchomą a ruchomą o
0,5 metra, a przemieszczenie kątowe o 0,03º.
Pomimo wielu zalet referencja ARTEMIS posiada również
wady: praca może
zostać zakłócona przez padający deszcz lub śnieg.
Przygotowanie systemu do

20
pracy zajmuje dużo czasu przez konieczność zainstalowania i uruchomienia
stacji przenośnej, uzależnienie stacji przenośnej od zasilania w miejscu
montażu, zakłócenia może wywołać pracujący w pobliżu radar.
3.
BLOK REFERENCJI KIERUNKU DZIOBU
Jako blok referencji kierunku dziobu wykorzystywane są tradycyjne
ż
yrokompasy
identyczne, jakie można spotkać na wielu statkach handlowych.
Każdy z pulpitów dynamicznego pozycjonowania ma swój osobny żyrokompas,
przy czym jest możliwość przełączania między pulpitami ich sygnałów
wyjściowych w razie awarii któregoś z nich.
W latach minionych były
stosowane żyrokompasy analogowe, obecnie stosowane są żyrokompasy z
cyfrowymi sygnałami wyjściowymi. Dane z żyrokompasu o kierunku dziobu są
transmitowane do systemu dynamicznego pozycjonowania. Służą jako
referencja rzeczywistego kierunku dziobu w odniesieniu do wartości zadanego
kierunku dziobu.
4.
BLOK REFERENCJI ŚRODOWISKA ZEWNĘTRZNEGO I STABILNOŚCI STATKU
W skład bloku referencji środowiska zewnętrznego i stabilności statku
wchodzą: czujniki pomiaru siły i kierunku wiatru (Wind Sensors) oraz układ
pomiarowy ruchów swobodnych statku VRS (Vertical Reference Sensor).
Czujniki siły i kierunku wiatru
Dane o sile i kierunku wiatru wysyłane są nieprzerwanie z czujników do
systemu dynamicznego pozycjonowania. Wielkości te mają zdolność szybkiego
zmieniania się w krótkich odstępach czasu. Przesyłanie do systemu aktualnych
informacji o wszelkich zmianach tych parametrów jest bardzo istotne, gdyż
dzięki temu system jest w stanie przewidzieć ruch statku wywołany siłą naporu
wiatru i zawczasu temu przeciwdziałać, poprzez odpowiednie zwiększenie siły i
kierunku oddziaływania sterów strumieniowych.
Zazwyczaj montowane są dwa czujniki na najwyższym maszcie
. W
warunkach pracy czujników możliwa jest nawet bardzo duża różnica wskazań
między nimi. Zakłócenia w ich pracy mogą wystąpić, gdy statek pracuje po
zawietrznej stronie platformy lub może je wywołać zawirowanie powietrza o
sąsiadujące elementy zamontowane na maszcie. W przypadku awarii jednego z
nich operator może wyeliminować go z pracy, w celu uniknięcia wprowadzenia
błędnych danych o sile i kierunku wiatru do systemu dynamicznego
pozycjonowania.
System posiada zdolność analizowania wskazań czujników, gdy ich dane
wyjściowe po porównaniu przez system są w miarę jednakowe to je uśrednia,
21
gdy wskazania są rozbieżne dane z jednego z nich, które uznał za
prawdopodobne uwzględnia do korekty pozycji, a dane z drugiego odrzuca.
Sytuacje błędnych wskazań czujników w pewnych okolicznościach można
przewidzieć. Lądowanie helikoptera na pokładzie wywołuje błąd wskazań siły i
kierunku wiatru, więc odpowiednio wcześniej operator z pulpitu wyłącza je, i
dzięki temu system dynamicznego pozycjonowania nie bierze ich pod uwagę
przy analizowaniu przemieszczeń statku.
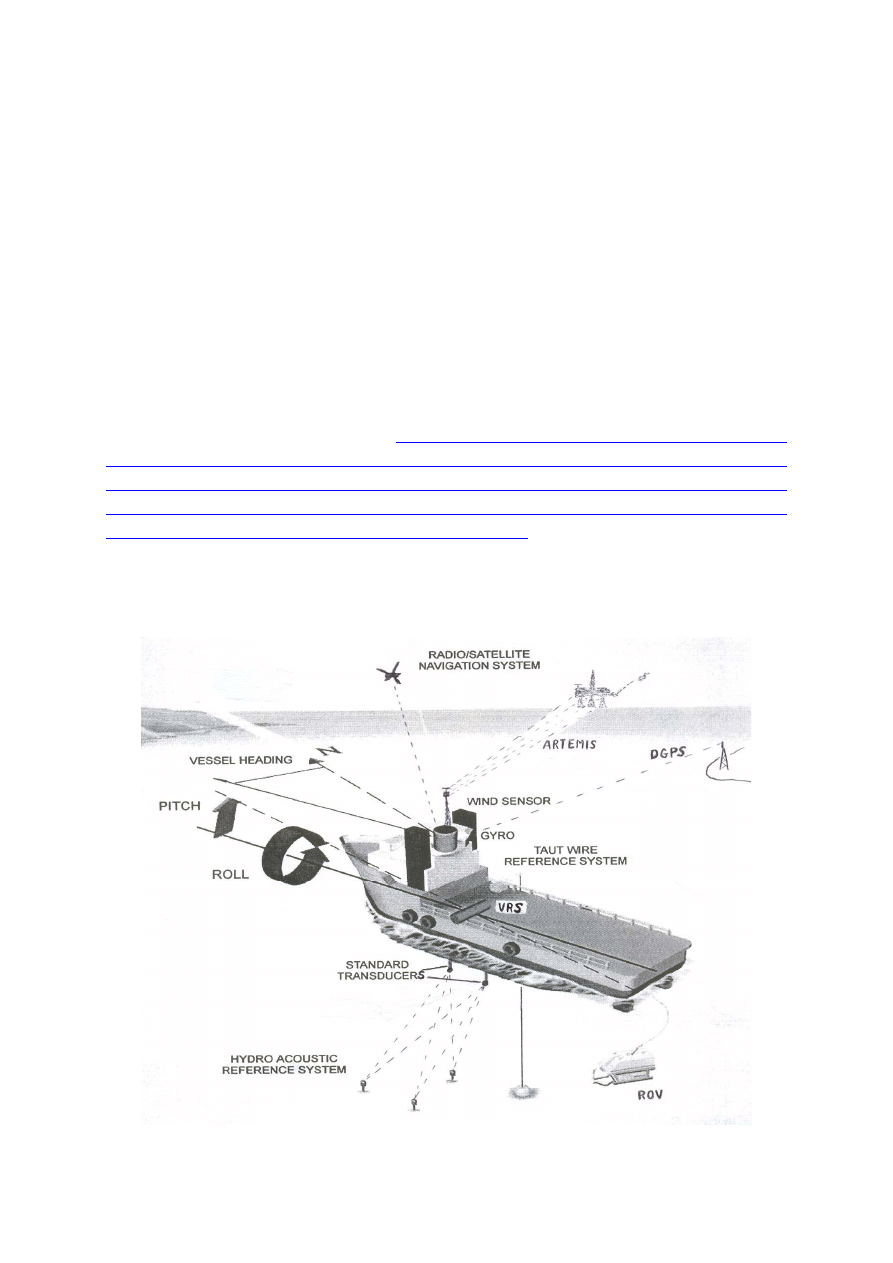
Czujnik ruchów swobodnych VRS
Istnieje konieczność wprowadzania do głównego komputera systemu
dynamicznego pozycjonowania danych o ruchach swobodnych statku. System
cały czas na bieżąco musi być informowany o kątach odchylenia osi środka
obrotu statku od pionu. Kąty odchylenia są skutkiem występowanie ruchów
swobodnych statku roll i pitch.
Dane z czujnika VRS są wprowadzane jako
korekta wskazań referencji pozycji (Taut Wire, HPR, ARTEMIS), gdyż podczas
występowania ruchów swobodnych statku powyższe referencje wychwytują
zmiany kątów pomiędzy własnymi czujnikami a elementami odniesienia. W
rzeczywistości jednak statek nie przemieszcza się.
Jako czujnik ruchów swobodnych w nowszym wykonaniu można spotkać
MRU (Movment Reference Unit), zadania i zasada działania czujnika są
identyczne.
Rys. 12 – Zilustrowanie rozmieszczenia referencji [3]
22
5.
BLOK WYTWARZANIA I ROZDZIELANIA ENERGII ELEKTRYCZNEJ
Wymagania dotyczące dostępnego zapasu energii elektrycznej na statkach
wyposażonych w system dynamicznego pozycjonowania są o wiele większe niż
na konwencjonalnych jednostkach. Najczęściej stosowanym systemem
energetycznym jest tzw: Diesel – Electric. Silniki główne napędzają prądnice
synchroniczne wytwarzające energię elektryczną oddawaną na wspólne szyny
zbiorcze tablicy rozdzielczej wysokiego napięcia (Bus Bars). Stamtąd zasilane
są silniki elektryczne wszystkich sterów strumieniowych i śrub napędu
głównego
.
Zespoły prądotwórcze wytwarzają napięcie rzędu 6 kV prądu
przemiennego.
Każdy z silników napędowych powinien mieć osobny system
zasilania w paliwo, osobny system chłodzenia i smarowania.
Zainstalowanie
wielu zespołów prądotwórczych daje możliwość lepszej dyspozycji mocą w
zależności od potrzeb, jak również podwyższa pewność działania układu
energetycznego. Nad poprawnością pracy elektrowni statkowej czuwa
skomputeryzowany
system zarządzania energią PMS
(Power Management
System). Dzięki wielu czujnikom zamontowanym w urządzeniach bez przerwy
monitorowany jest stan parametrów pracy siłowni, tj: ciśnienia, temperatury,
stopień obciążenia zespołów prądotwórczych, dostępny zapas mocy, itp. W
normalnych warunkach część zespołów prądotwórczych znajduje się pod
obciążeniem, reszta jest utrzymywana w stanie gotowości (tzw: standby). W
przypadku awarii jednego z pracujących zespołów prądotwórczych, pozostałe,
będące w dyspozycji układu energetycznego przejmują jego moc obciążenia,
następnie automatycznie startuje jeden z zespołów utrzymywanych w rezerwie,
synchronizuje się z siecią i przejmuje symetrycznie moc obciążenia szyn
zbiorczych. Gdy nastąpi przeciążenie pracujących prądnic poprzez zmianę
zapotrzebowania
na
moc
(np:
nagłe
pogorszenie
się
warunków
atmosferycznych, konieczność wykonania gwałtownego manewru, itp.)
automatycznie uruchamia się jeden lub więcej zespołów prądotwórczych
utrzymywanych w rezerwie, synchronizują się i symetrycznie dzielą się mocą
obciążenia z pozostałymi zespołami.
23
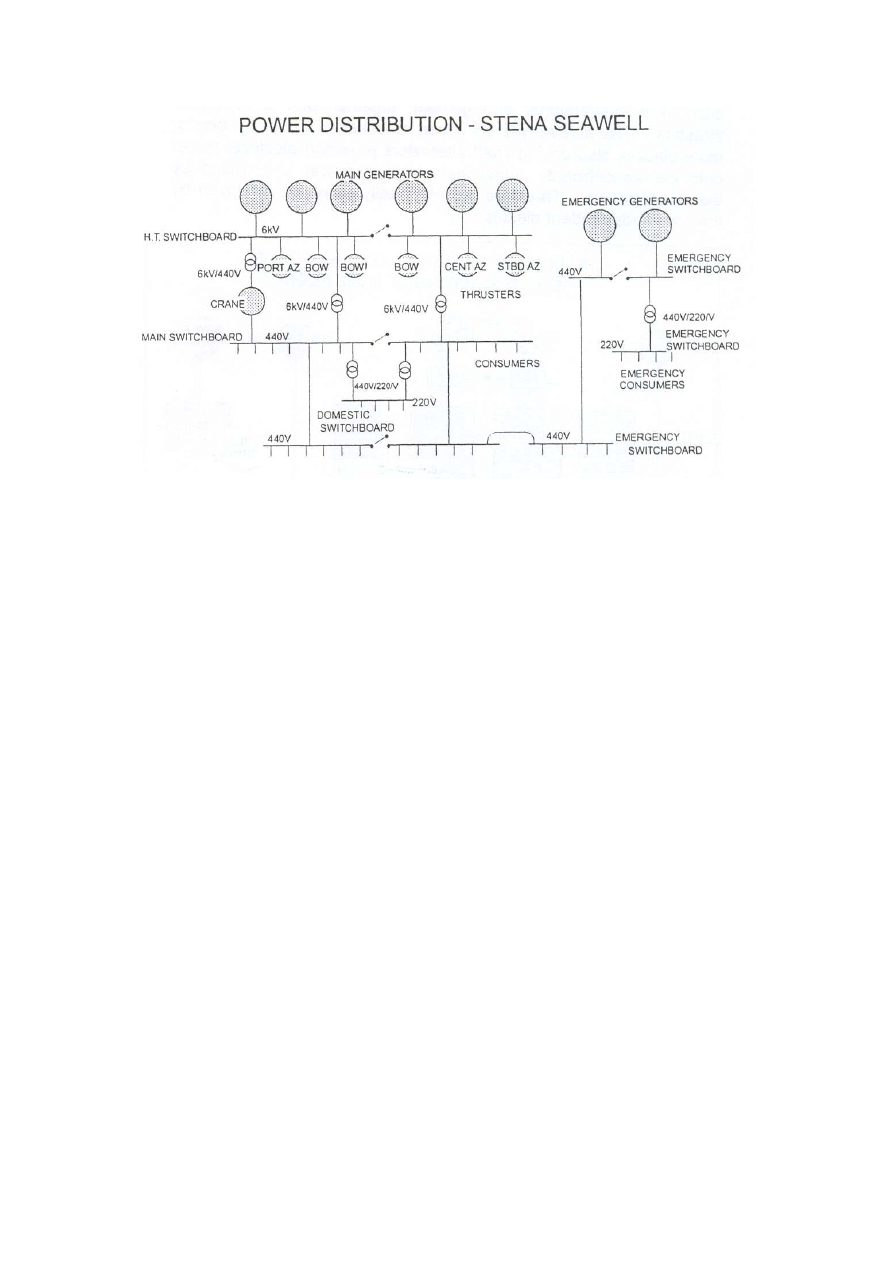
Rys. 13 – Przykład rozwiązania wytwarzania i rozdziału energii elektrycznej
na statku wyposażonym w system dynamicznego pozycjonowania
MAIN GENERATORS – prądnice główne, H.T. SWITCHBOARD – tablica rozdzielcza
wysokiego napięcia, THRUSTERS – stery strumieniowe, EMERGENCY GENERATORS –
prądnice awaryjne, EMERGENCY SWITCHBOARD – awaryjna tablica rozdzielcza,
MAIN SWITCHBOARD - główna tablica rozdzielacza, CONSUMERS – odbiory energii,
DOMESTIC SWITCHBOARD – tablica odbiorów wewnętrznych,
Szyny zbiorcze wysokiego napięcia składają się z dwóch sekcji połączonych
ze sobą wyłącznikiem (Bus Tie).
Każdą z sekcji zasila połowa zespołów
prądotwórczych układu energetycznego. Silniki sterów strumieniowych
podłączone są do szyn zbiorczych w taki sposób, aby z tej samej sekcji był
zasilany, co drugi ster strumieniowy. Śruby napędów głównych muszą być
również zasilane z dwóch osobnych sekcji
. System tego typu zapewnia
maksymalne bezpieczeństwo i pewność utrzymania pozycji w przypadku
wystąpienia zwarcia na jednej z sekcji szyn zbiorczych wysokiego napięcia. W
takim przypadku wyłącznik (Bus Tie) odseparowuje uszkodzoną część szyn
zbiorczych, lecz system dynamicznego pozycjonowania nadal ma do dyspozycji
połowę zainstalowanych sterów strumieniowych i jedną ze śrub napędu
głównego.
Do szyn zbiorczych wysokiego napięcia podłączone są
transformatory
zasilające tablice rozdzielcze niskiego napięcia,
zazwyczaj 660V lub 440V
. Z
nich są zasilane inne odbiorniki, np.: pompy, dźwigi, wentylatory, urządzenia
grzejne, itp. Następna grupa tablic rozdzielczych służy do zasilania oświetlenia,
gniazd kabinowych i innych odbiorników małych mocy wyposażenia
24
statkowego. Zasilane są ze specjalnych transformatorów energetycznych.
Zazwyczaj wykonywane na napięcie 220 V prądu przemiennego.
Elementy dynamicznego pozycjonowania, które współpracują z układami
komputerowymi i same komputery muszą być zasilane poprzez UPS-y
(Uninterruptible Power Supply).
Zapewniają one ciągłość zasilania w przypadku
krótkotrwałych awarii rozdzielnic jak i w razie zupełnego zaniku energii
elektrycznej (tzw: blackout), eliminują niestabilności napięcia sieci wywołane
stanami nieustalonymi. Do zasilania bardzo ważnych urządzeń stosuje się dwa
niezależne UPS-y, podłączone do osobnych źródeł. Jeden z nich pracuje jako
główny (master) a drugi jako zapasowy (slave).
Pojemność baterii UPS
wystarcza na około 30 minut nieprzerwanej pracy.
Posiadają wbudowany
system samodiagnozujący. Wszelkiego rodzaju zakłócenia w poprawnej pracy
(np: pogorszenie się stanu technicznego baterii akumulatorów, nadmierna
temperatura wewnątrz obudowy, przeciążenie, itp.) są sygnalizowane za pomocą
lampek kontrolnych, a w niektórych typach sygnałem akustycznym. Do zadań
załogi technicznej należy czasowe sprawdzanie poprawności działania UPS-ów.
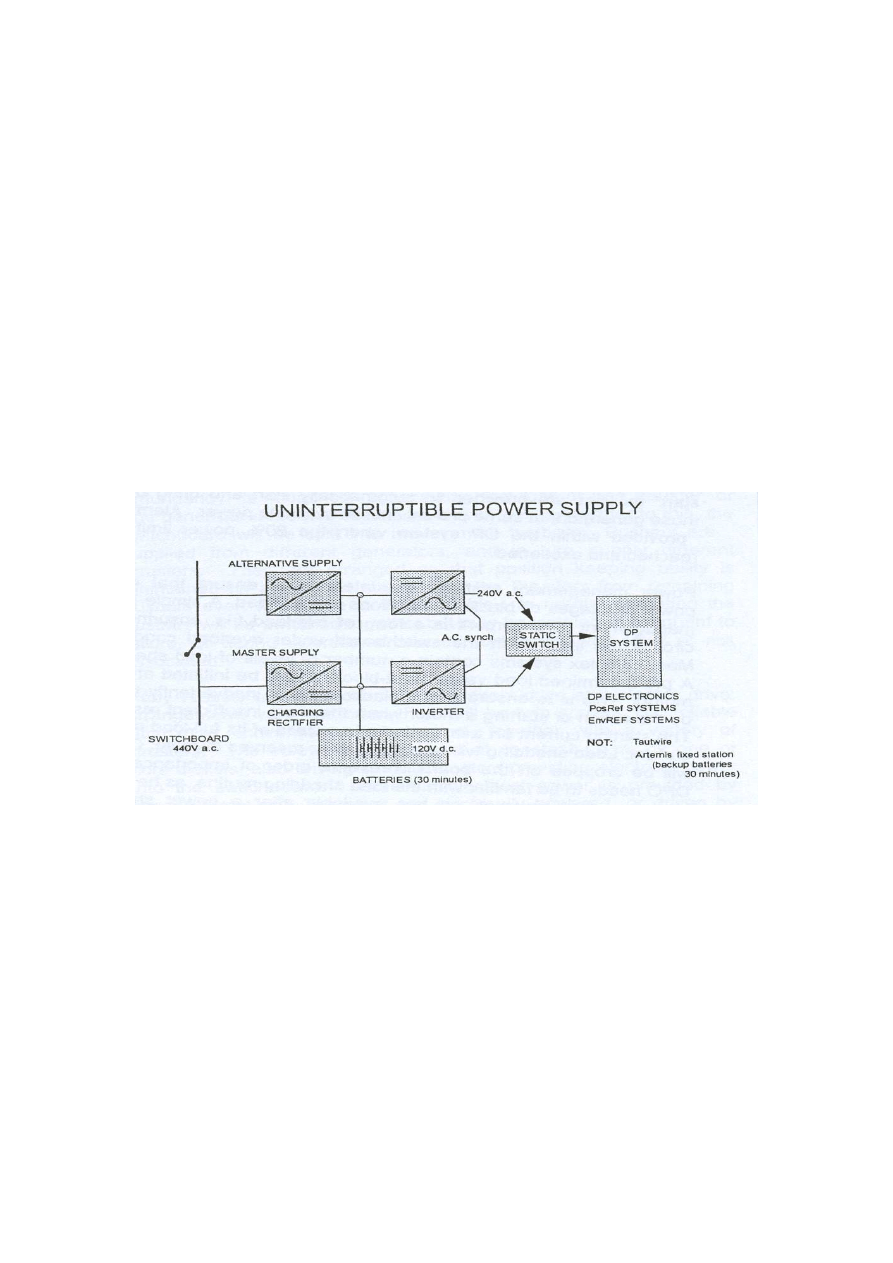
Rys. 14 – Przykładowe rozwiązanie zasilania systemu dynamicznego
pozycjonowania za pomocą UPS-ów
SWITCHBOARD – tablica rozdzielcza, MASTER SUPPLY – zasilanie główne, ALTERNATIV
SUPPLY – zasilanie pomocnicze, CHARGING RECTIFIER – prostownik, INVERTER –
falownik, BATTERIES – bateria akumulatorów, STATIC SWITCH – przełącznik zasilania,
DP SYSTEM – system dynamicznego pozycjonowania,
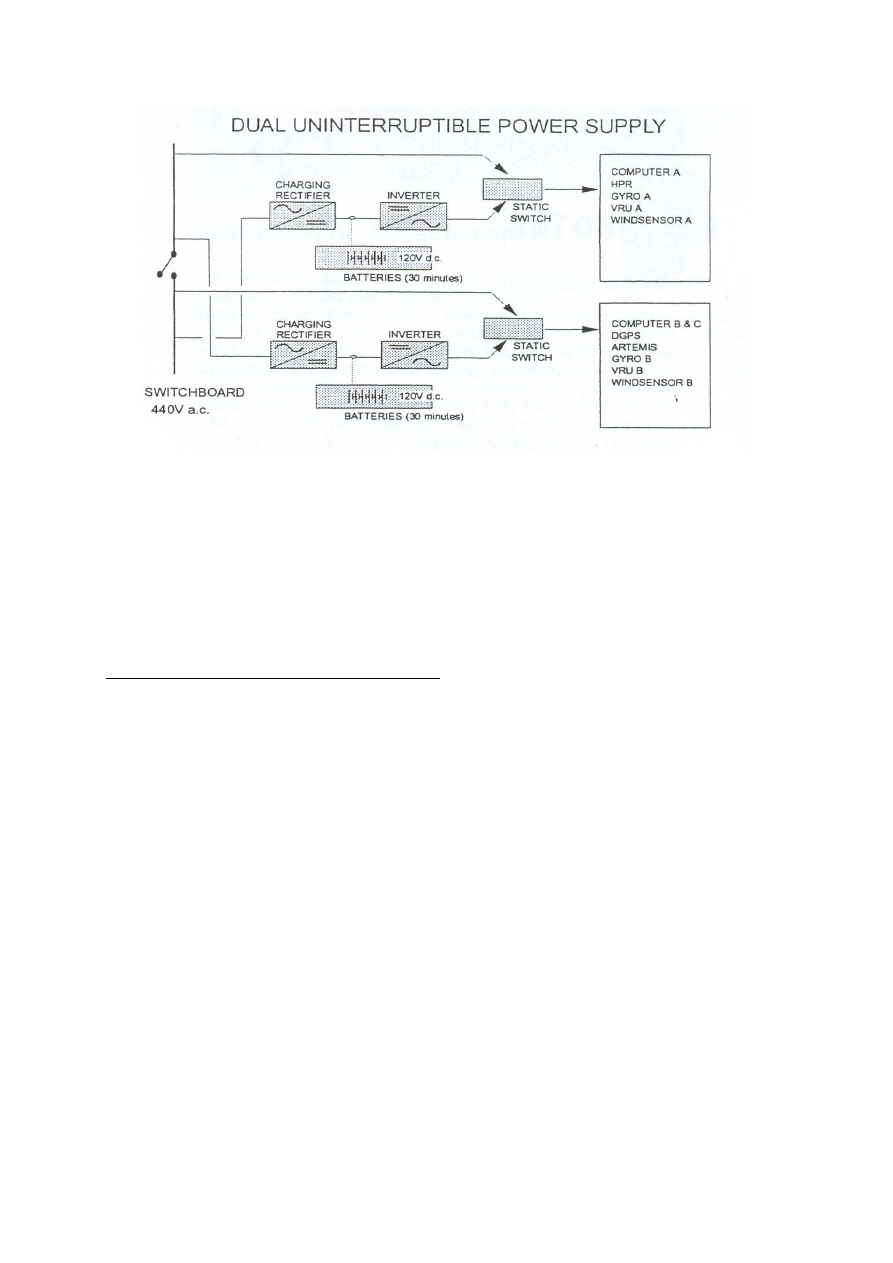
W sytuacji, gdy sprawność działania systemu dynamicznego pozycjonowania
ma szczególne znaczenie (np.: życie ludzi, niebezpieczeństwo utraty lub
zniszczenia drogiego sprzętu, nadmierne opóźnienie wykonania prac, itp.)
stosuje się układ UPS-ów posiadających
dwie osobne baterie akumulatorów
.
25
Rys. 15 – Przykładowe rozwiązanie zasilania systemu dynamicznego
pozycjonowania za pomocą UPS-ów z osobnymi bateriami akumulatorów
SWITCHBOARD – tablica rozdzielcza, MASTER SUPPLY – zasilanie główne, ALTERNATIV
SUPPLY – zasilanie pomocnicze, CHARGING RECTIFIER – prostownik, INVERTER –
falownik, BATTERIES – bateria akumulatorów, STATIC SWITCH – przełącznik zasilania,
DP SYSTEM – system dynamicznego pozycjonowania,
6.
BLOK NAPĘDÓW STRUMIENIOWYCH
Manewrowanie statkiem i utrzymywanie go na żądanej pozycji odbywa się za
pomocą sterów strumieniowych (thrusters). Istnieją trzy główne wykonania
sterów strumieniowych: śruby napędu głównego (main propellers), tunelowe
stery strumieniowe (tunnel thrusters) i pędniki azymutowe (azimuth thrusters).
Typowy statek wyposażony w system dynamicznego pozycjonowania posiada
dwie śruby napędu głównego. Zazwyczaj są to śruby o regulowanym
wychyleniu płatów, obracające się w jednym kierunku ze stałą prędkością
obrotową, napędzane elektrycznymi silnikami asynchronicznymi. W nowszych
wykonaniach spotyka się śruby o stałym skoku, z możliwością nastawy
prędkości obrotowej i możliwością zmiany kierunku wirowania, zasilane
poprzez falowniki z regulowana częstotliwością napięcia wyjściowego.
Tunelowe stery strumieniowe instaluje się, odpowiednio do wielkości statku i
konieczności zapewnienia zdolności manewrowych, zależnych od wymagań
stawianych przez rodzaj prac podwodnych, do których statek jest przewidziany.
Typowe rozwiązanie posiada trzy tunelowe stery strumieniowe na dziobie (bow
tunnel thrusters) i dwa na rufie (aft tunnel thrusters). Podobnie jak śruby napędu
głównego, stery strumieniowe mogą wirować ze stałą prędkością obrotową i
26
mieć regulację kąta wychylenia płatów lub mogą być zasilane poprzez
falowniki.
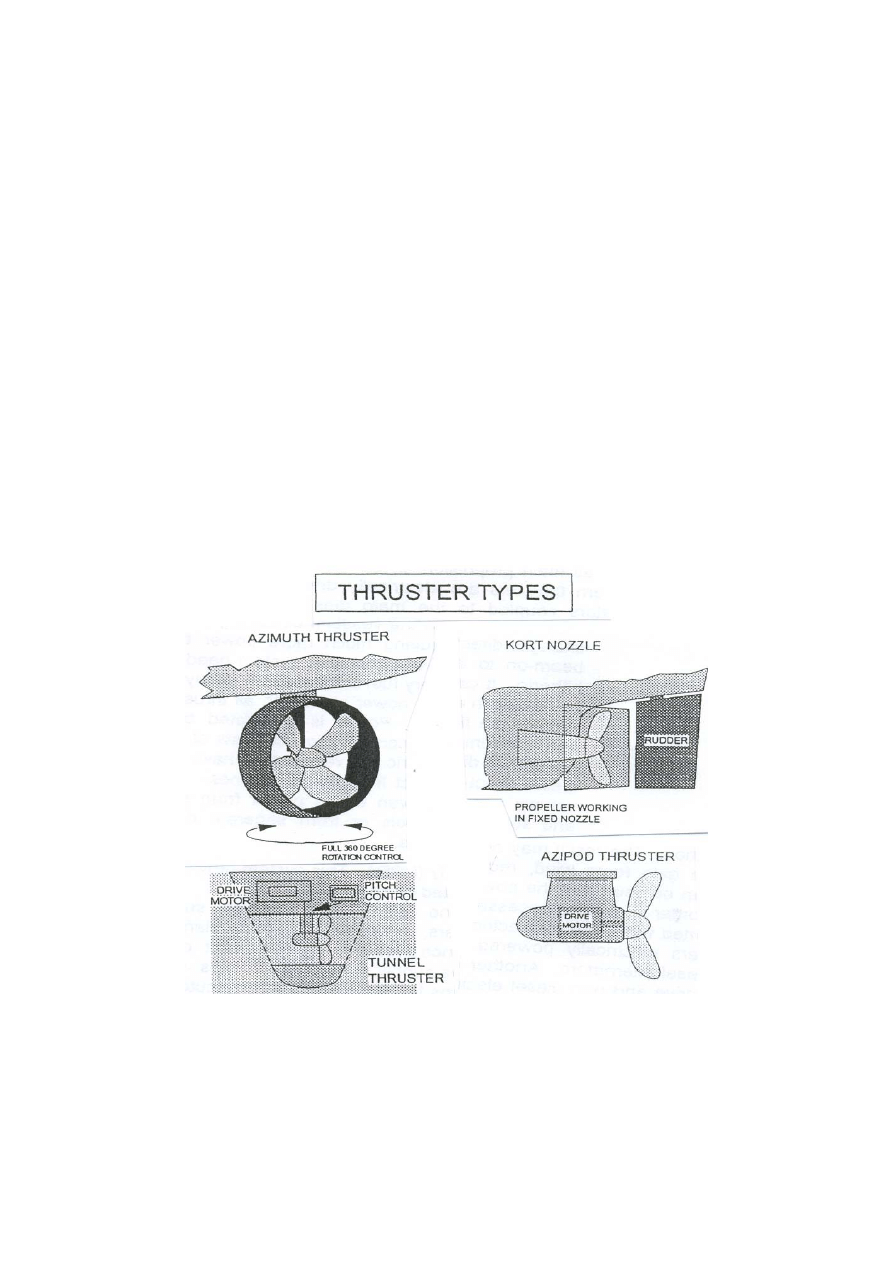
Pędniki azymutowe są teleskopowo wysuwane z dna statku. Mają możliwość
obrotu o kąt 360º, czyli w zależności od potrzeb mogą oddziaływać w każdą
stronę. W typowych rozwiązaniach mają śrubę o stałym skoku, regulowaną
prędkość i kierunek obrotów za pomocą falowników. W starszych typach
spotyka się pędniki azymutowe wysuwane wahadłowo z dna statku, wirujące ze
stałą prędkością obrotową, posiadające śrubę o regulowanym skoku. Statki
wyposażone w system dynamicznego pozycjonowania mogą mieć jeden lub
kilka pędników azymutowych rozmieszczonych wzdłuż dna kadłuba. Innym
rozwiązaniem napędu strumieniowego jest azipod thruster, stosowany jako
napęd główny. Elektryczny silnik napędowy znajduje się w korpusie pod wodą i
bezpośrednio na wale silnika osadzona jest śruba o stałym skoku. Silnik ma
możliwość wirowania w obu kierunkach ze zmienna prędkością obrotową,
zasilany jest poprzez falowniki. Rozwiązanie to jest nowe i coraz częściej
stosowane, najczęściej do bardzo dużych mocy. Napięcie zasilania dochodzi do
11kV, a moc silnika nawet do 8MW.
Rys. 16 – Przykłady rozwiązań napędów strumieniowych
27
Rys. 17 - Przykład rozmieszczenia napędów strumieniowych
Wyszukiwarka
Podobne podstrony:
dynamikawyklad13, Wykład 13
Dynamika Wykłady Część teoretyczna
Mechanika - Dynamika, dynamikawyklad8, wykład 8
Dynamika wyklad
uklady1, 2 ROK, 3ci SEMESTR, Modele ukladow dynamicznych, wyklad
Mechanika - Dynamika, dynamikawyklad11, WYKŁAD 11
Ostatni wykład z Dynamiki
Dynamika Budowli wyklad 4 2011 12
Dynamika zmian rozwojowych oraz podejścia?dawcze w psych rozwoju wykład 2 3
wykłady - pozycje, Akademia Morska Szczecin Nawigacja, uczelnia, wyklady, WYKŁADY NAWIGACJA
Badania Operacyjne UW, wykład 3 produkcja-zapasy, Programowanie dynamiczne
antropologia Wykład 2. DYNAMIKA ZJAWISK KULTURY; KULTURA I OSOBOWOŚĆ – WZAJEMNE RELACJE
wykłady, depresja3-maj'02-Karolina, Pozycja depresyjna jako jakość która z perspektywy psychoanality
Wyklad 10 Dynamika MS
Wyklad 08 Dynamika MS
Wyklad 08 Dynamika MS
więcej podobnych podstron