MECHANIZMY
Para kinematyczna.
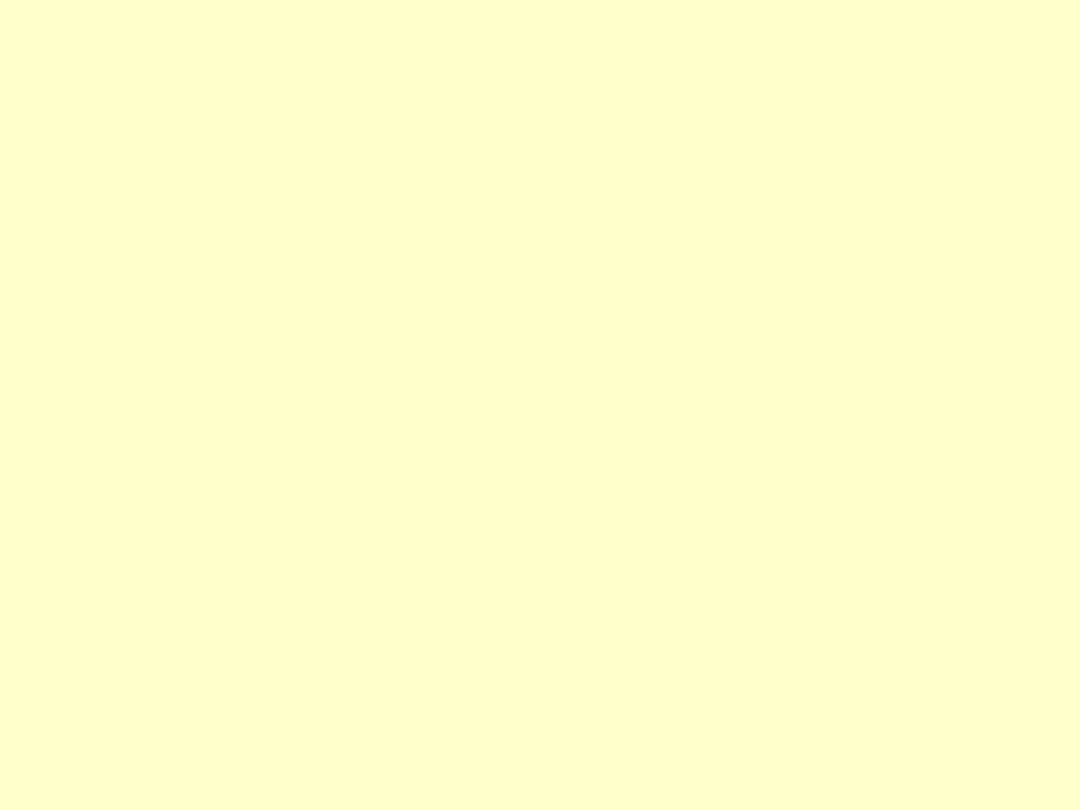
Człony (ogniwa) pary kinematycznej
Przykłady członów (ogniw) i ich schematycznego przedstawienia
człony (ogniwa) – elementy składowe pary kinematycznej.
Para kinematyczna
(węzeł kinematyczny)
– to zespół dwóch ciał,
w którym forma jednego ciała określa cały zbiór kolejnych położeń,
które może zając ciało drugie
Para kinematyczna
– ruchome połączenie dwóch członów
Członem pary kinematycznej
może być:
• sztywne ciało stałe,
np. wał, korbowód, tłok,
dźwignia,
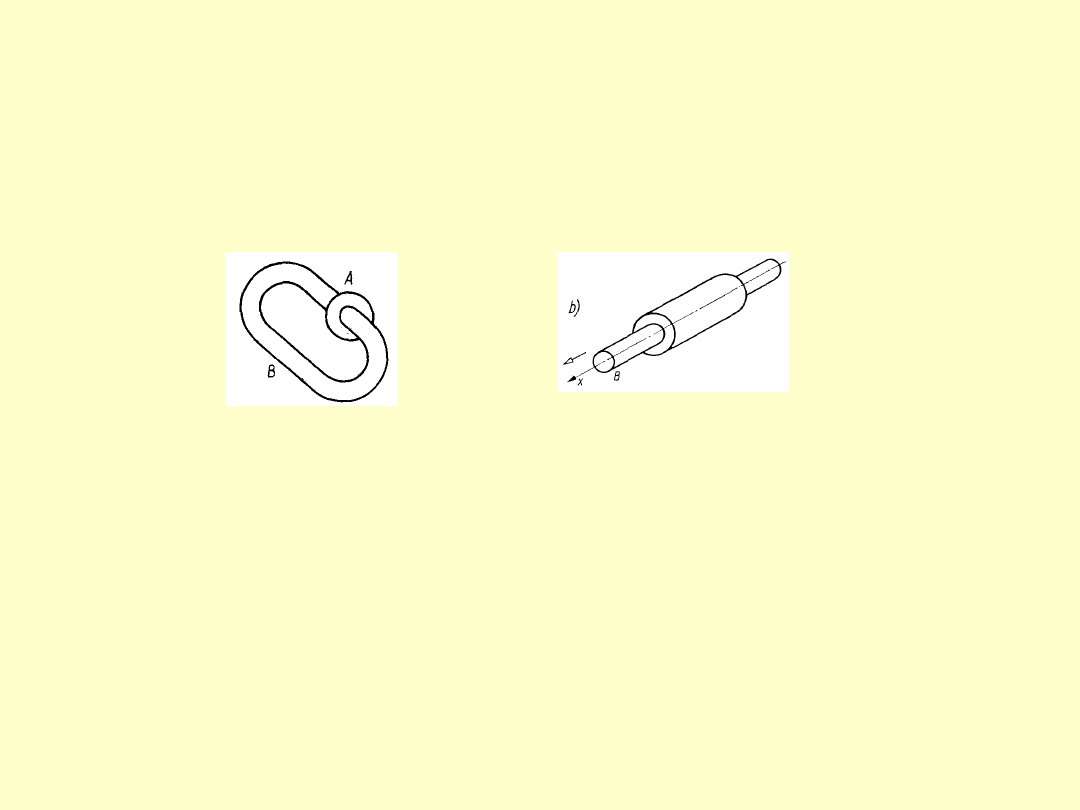
• ciało odkształcalne
(np. pas, lina, łańcuch, sprężyna, resor)
• ciało ciekłe albo gazowe,
zamknięte w zbiorniku,
cylindrze, przewodach
Mechanizm
• Człon nieruchomy nazywa się podstawą
(ostoją, ramą, kadłubem)
• Łańcuch kinematyczny – zespół członów
połączonych w pary
• Mechanizm – łańcuch kinematyczny z
jednym członem nieruchomym (podstawą),
przeznaczony do wykonywania
określonych ruchów
Niższe i wyższe pary
kinematyczne
• Niższe pary mają styk
powierzchniowy
członów,
ruch:
– z poślizgiem
– rodzaj ruchu taki sam nie
zależnie od wybory
podstwy
• W parach wyższych –
styk między członami
wzdłuż linii lub w
punkcie,
ruch
– toczny
bez poślizgu, albo
toczny z jednoczesnym
poślizgiem
– nieodwracalny
Łańcuchy kinematyczne
• Zamknięty
• otwarty
Każdy człon jest połączony z innymi
członami łańcucha nie mniej niż
dwiema parami
• Prosty
(
nie więcej niż dwie
pary)
• Złożony (
więcej niż
dwie pary
)
Klasyfikacja par
kinematycznych
Klasa pary kinematycznej I, II, III, IV i V
– jest to liczba stopni swobody
Każdy człon może mieć sześć stopni
swobody:
trzy przesunięcia wzdłuż trzech osi
współrzędnych
i trzy ruchy obrotowe wokół tych osi
Połączenie w parę odbiera każdemu z
członów pewną liczbę stopni swobody
a
:
a = 6 – s
gdzie:
s — liczba stopni swobody danej pary
kinematycznej
Klasa I
liczba stopni swobody s = 1,
(liczba więzów a =5)
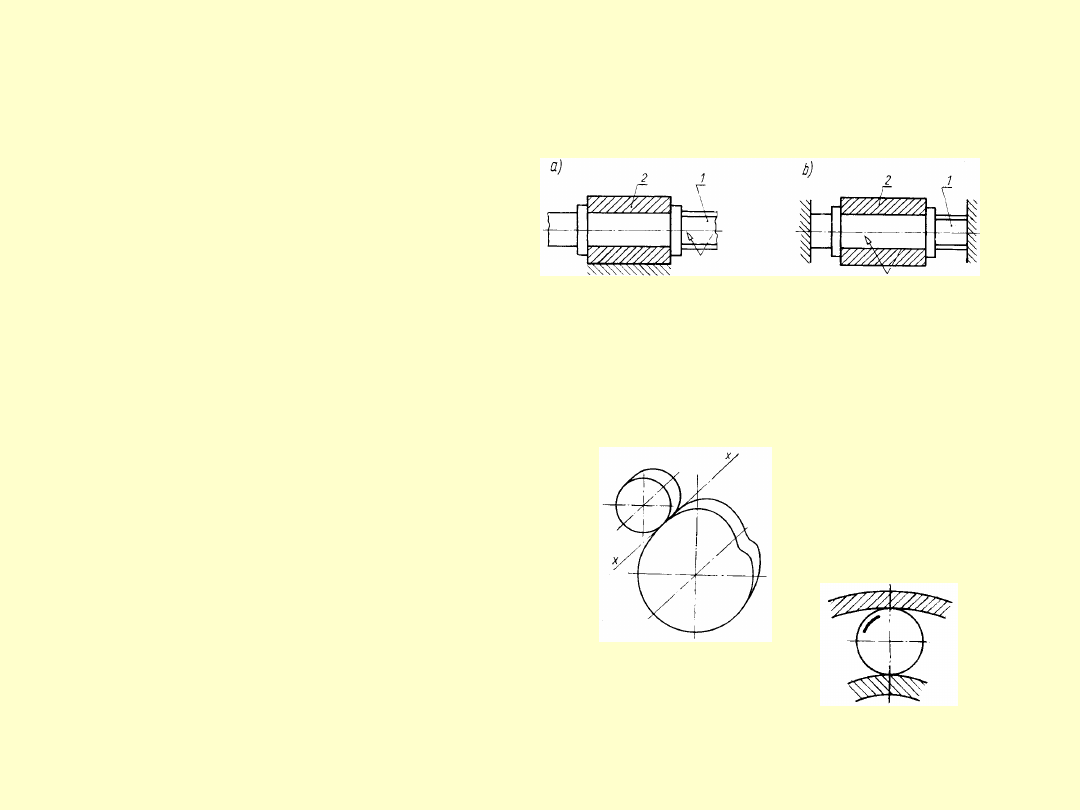
Klasa II
liczba stopni swobody s = 2,
(liczba więzów a =4)
dwa ruchy obrotowe
jednego ruchu
obrotowego i jednego
przesunięcia
przegub walcowy z możliwością przesuwu
osiowego, koła zębate,
mechanizmy krzywkowe, klinowe, łożyska
rolkowe
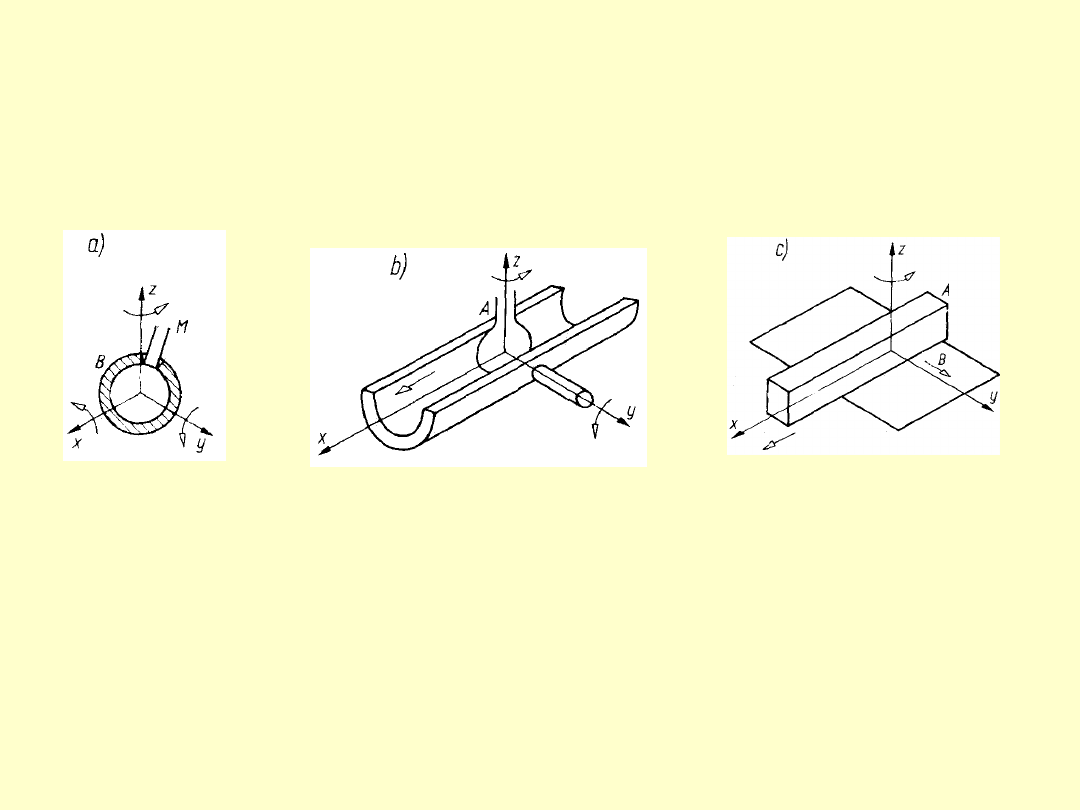
Klasa III
liczba stopni swobody s = 3,
(liczba więzów a =3)
Większość mechanizmów płaskich zalicza się do III klasy par kinematycznych
z trzema
ruchami
obrotowymi
(przegub
kulisty
z dwoma
ruchami
obrotowymi i
jednym
postępowym
z dwoma
ruchami
postępowymi i
jednym
obrotowym
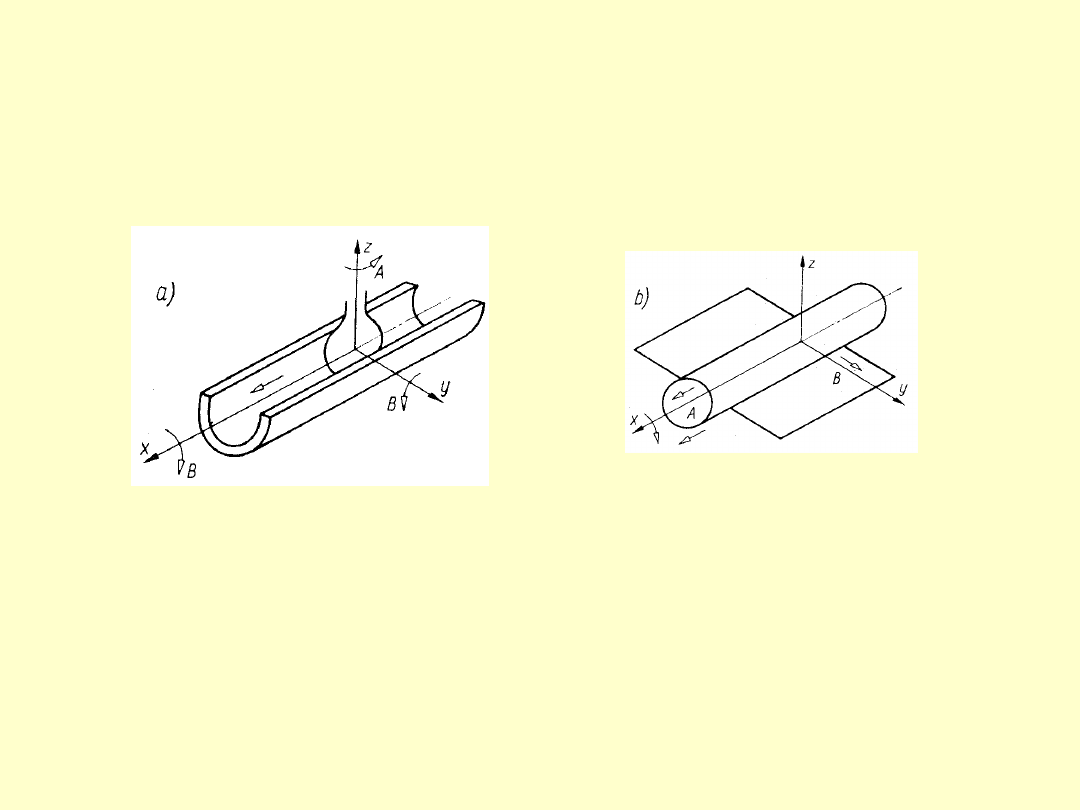
Klasa IV
liczba stopni swobody s = 4,
(liczba więzów a =2)
trzy ruchy
obrotowe i jeden
postępowy
dwa ruchy
obrotowe i dwa
postępowe
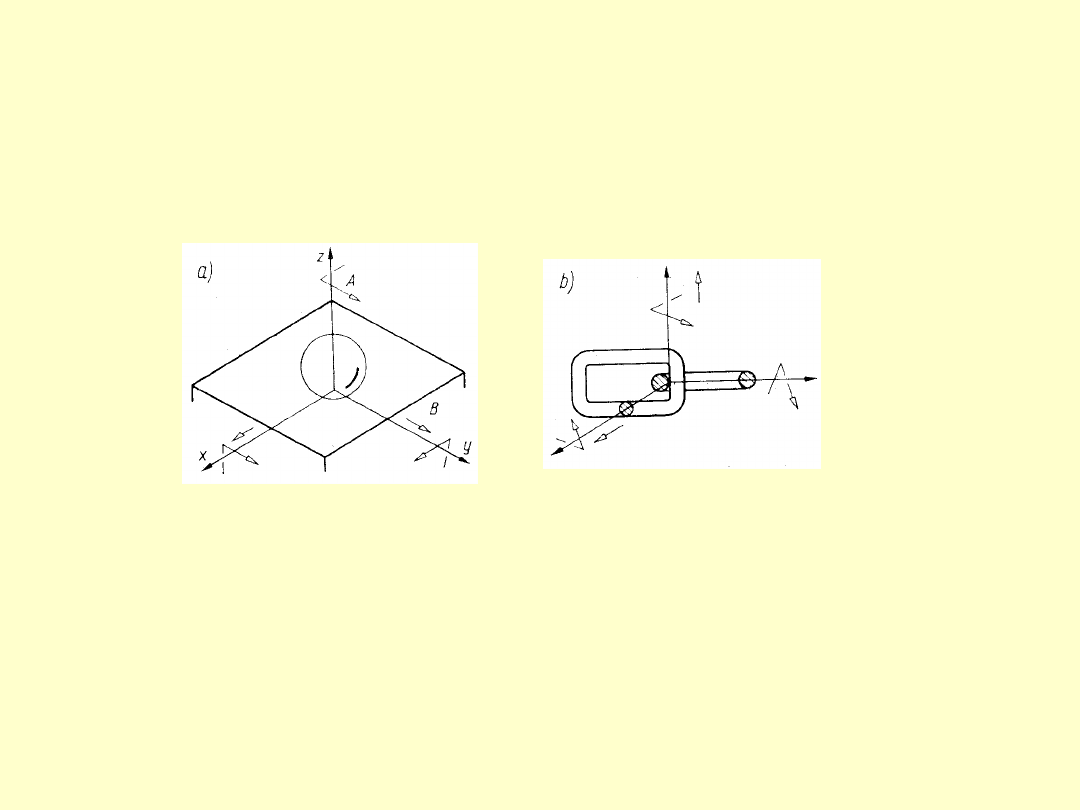
Klasa V
liczba stopni swobody s = 5,
(liczba więzów a =1)
tylko jedna postać par
kinematycznych, powstająca przez
uniemożliwienie jednego ruchu
postępowego:
- punktowe zetknięcie kuli z
płaszczyzną,
- zamknięcie siłowe
Wzory strukturalne 1
Łańcuch kinematyczny o
n
członów ma jeden człon
nieruchomy (podstawa), zatem jest złożony z n-1
członów ruchowych
Przed połączeniem się w pary kinematyczne
rozważane człony miały łącznie 6(n-1) stopni
swobody
Ruchliwością
łańcucha kinematycznego
nazywamy
liczbę stopni swobody członów ruchowych
łańcucha względem podstawy, pozostałych po
połączeniu par kinematycznych
Wzory strukturalne – 2
gdzie:
p
1
liczba par klasy I,
p
2
liczba par klasy II itd.,
a
1
liczba więzów (odebranych
stopni swobody) w klasie I,
a
2
liczba więzów (odebranych
stopni swobody) w klasie II itd.
= 6·(n - 1) - 5·p
1
- 4·p
2
- 3·p
3
- 2·p
4
- 1·p
5
= 6·(n - 1) - a
1
·p
1
- a
2
·p
2
- a
3
·p
3
- a
4
·p
4
- a
5
·p
5
Stopień ruchliwości łańcuchów płaskich
= 3·(n - 1) - 2·p
1
- 1·p
2
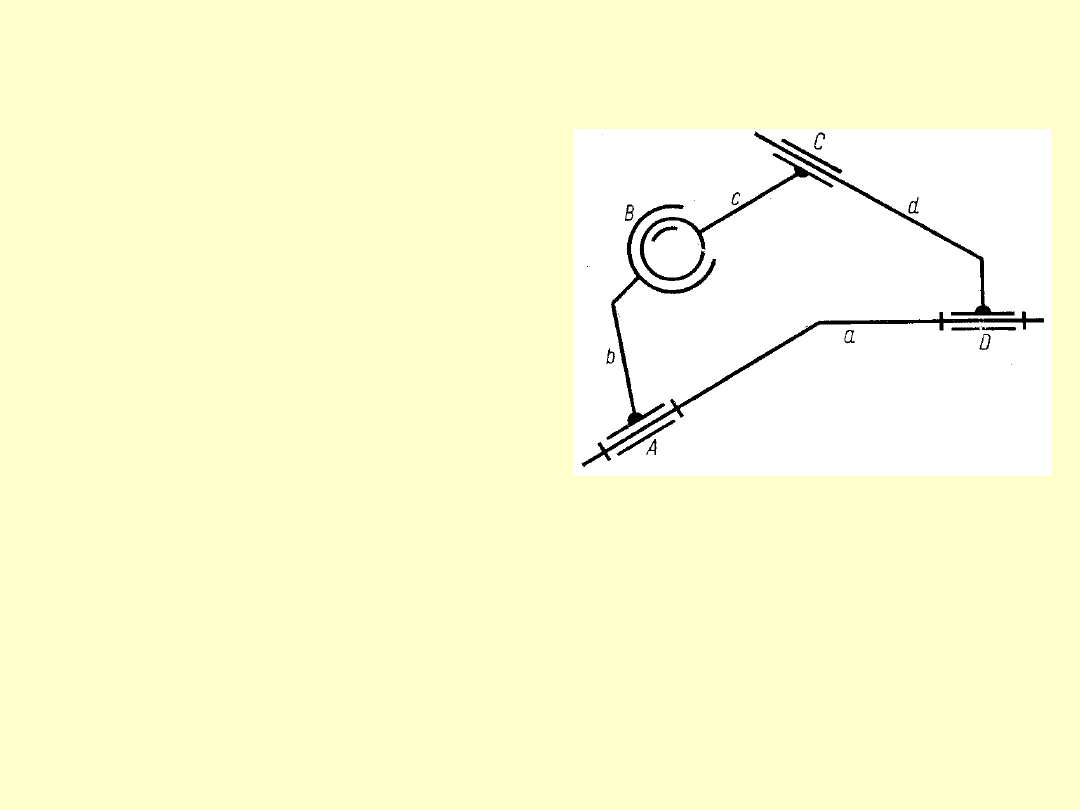
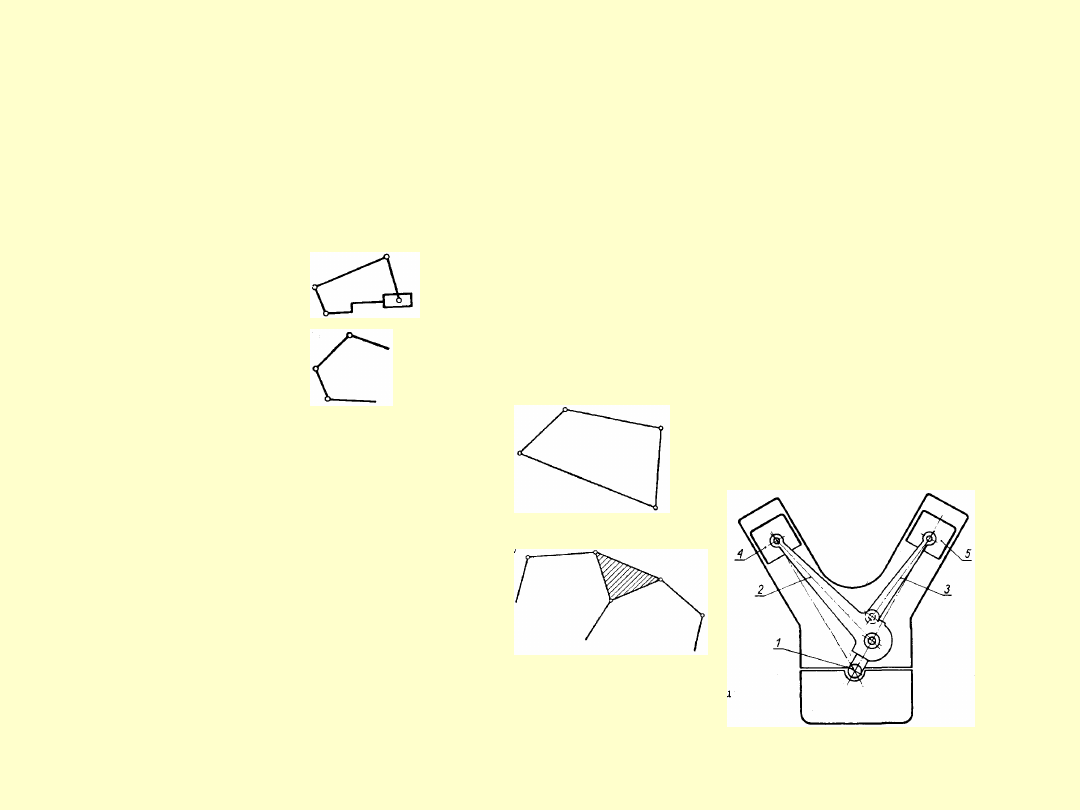
Przykład 1.
Określić stopień ruchliwości
łańcucha:
Liczba członów łańcucha n = 4,
pary kinematyczne A i D należą do
klasy I,
para C — do klasy II, para B — do
klasy III
= 6·(4 - l) - 5·2 - 4·l - 3·1 = 1
przy założonym ruchu dowolnego członu
wszystkie pozostałe człony będą wykonywać ruchy ściśle
określone
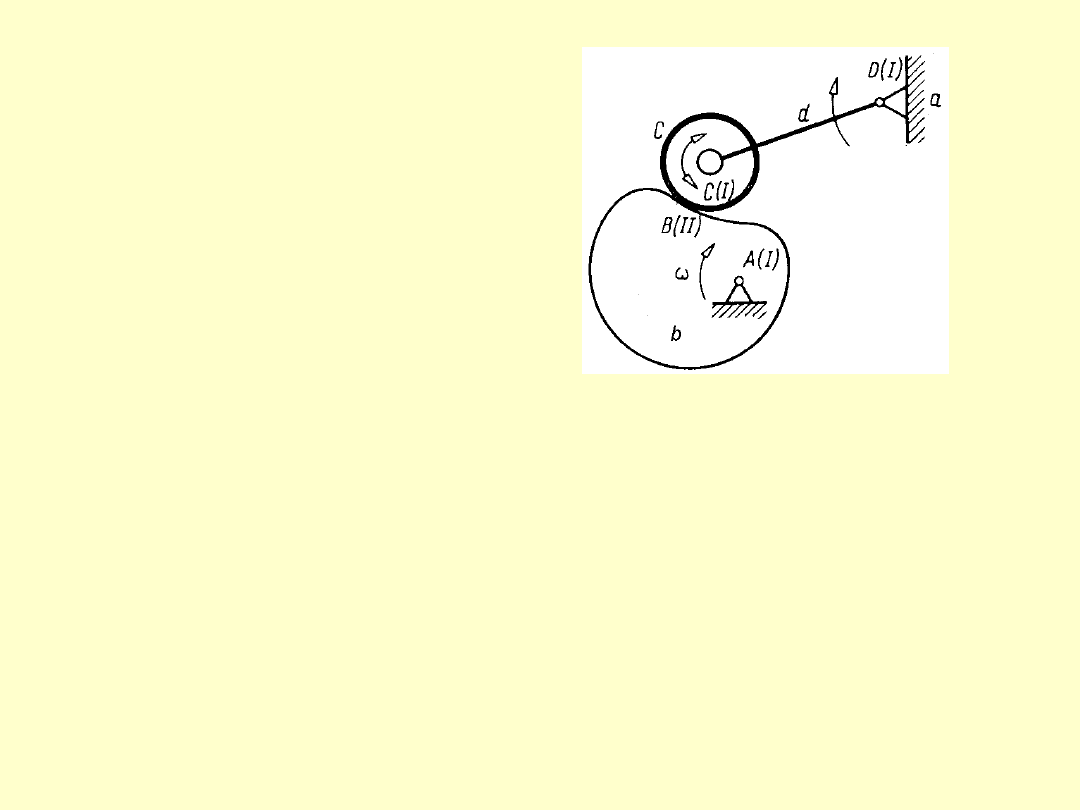
Przykład 2
w = 3·(n - 1) - 2·p
1
- 1·p
2
=3·(4 - 1) -
2·3 - 1·1 = 2
Liczba członów łańcucha n
= 4,
liczba par klasy I (A C, D)
p
1
= 3,
liczba par klasy II (B) p
2
=
1.
Stopień ruchliwości
łańcucha:
przy danej prędkości kątowej krzywki b popychacz
d
wykonuje
ruch ściśle określony, a zatem stopień ruchliwości łańcucha
jest w istocie
= 1
Pozorna niezgodność pochodzi stąd, że rachunek formalny wg
wzoru poza ruchliwością popychacza
d
— wykazał również istnienie
jeszcze jednego stopnia swobody — krążka
c
, który może się
obracać dokoła własnej osi, co nie ma żadnego wpływu na ruch
popychacza
d.
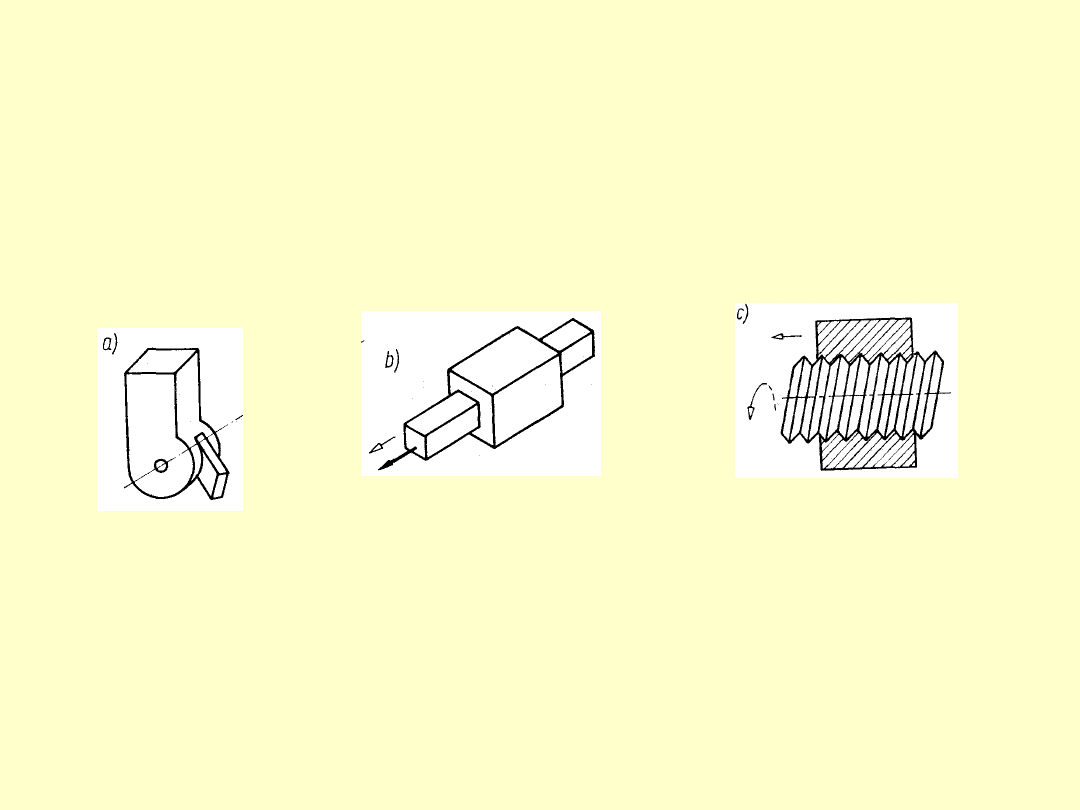
klasyfikacja strukturalno-
funkcjonalna
1)dźwigniowe wraz z korbowymi i jarzmowymi,
2)krzywkowe,
3)śrubowe,
4)mechanizmy ruchu obrotowego (zębate, cierne,
cięgnowe),
5)mechanizmy z elementami sprężystymi,
6)mechanizmy hydrauliczne i pneumatyczne.
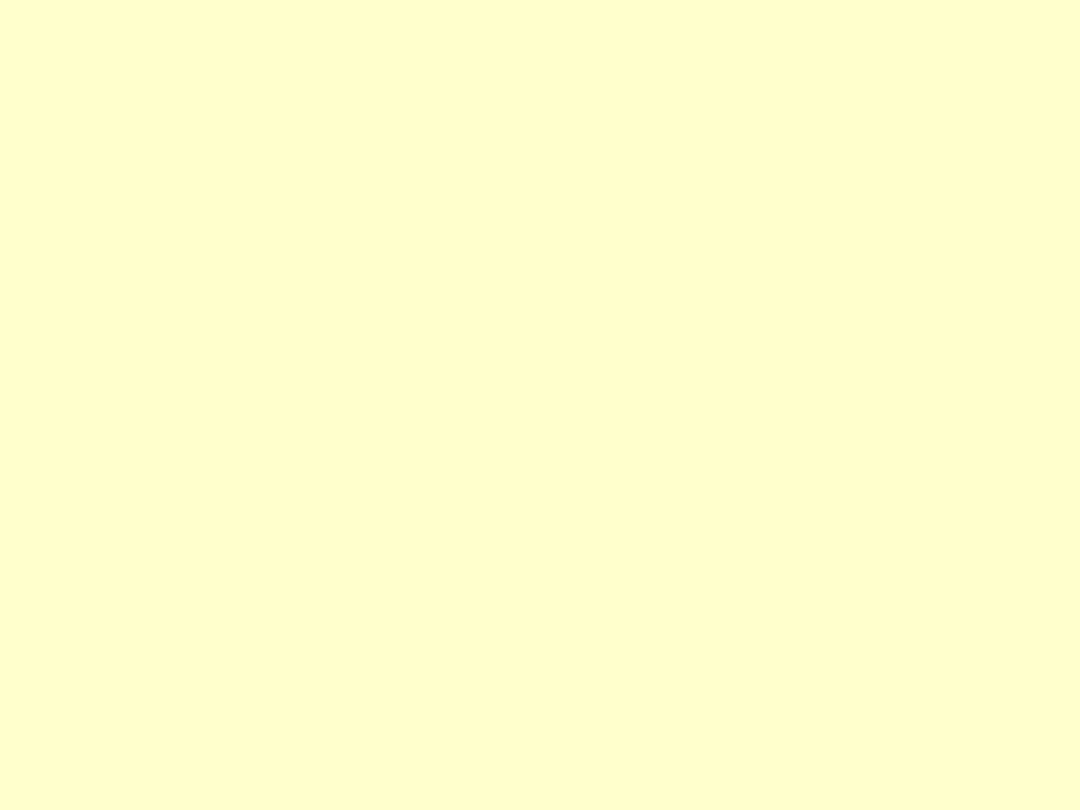
Mechanizmy dźwigniowe
Podstawowe odmiany czworoboku
przegubowego
a) mechanizm
korbowo-
wahaczowy
b)
mechanizm
dwuwahaczo
wy
c)
mechanizm
dwukorbowy
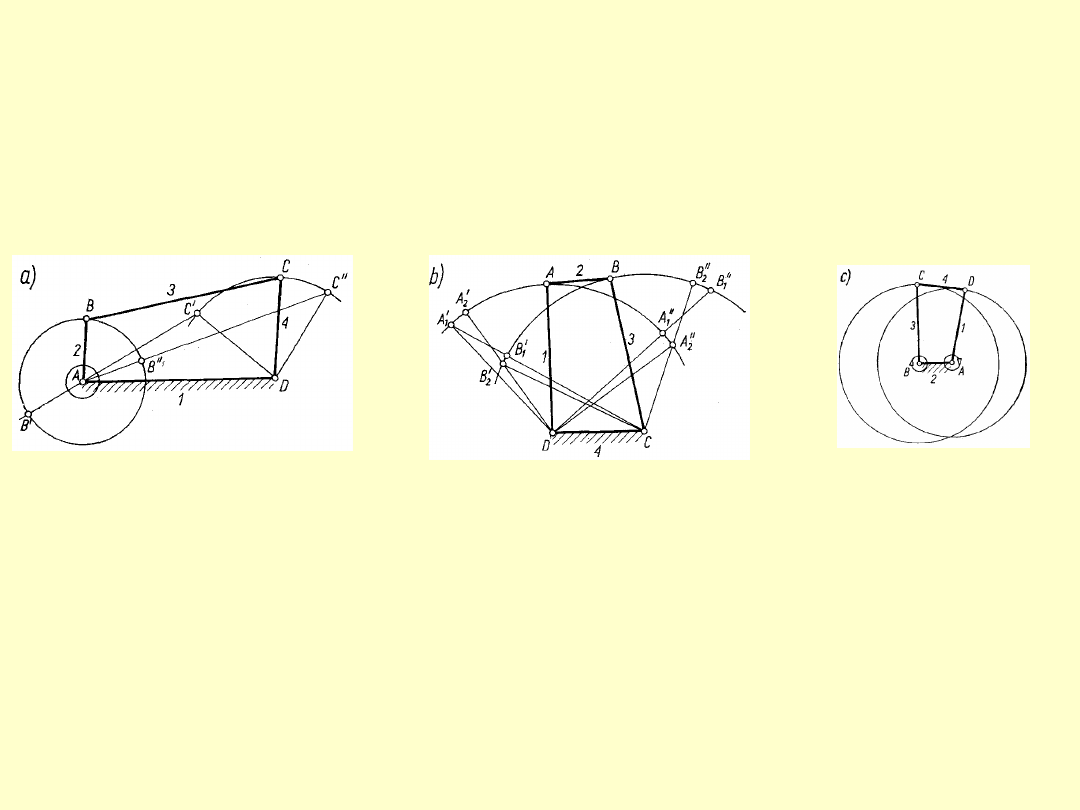
Mechanizmy korbowe
symetryczny
niesymetryczny
Wyznaczanie toru
punktów dla
mechanizmu
korbowego
symetrycznego
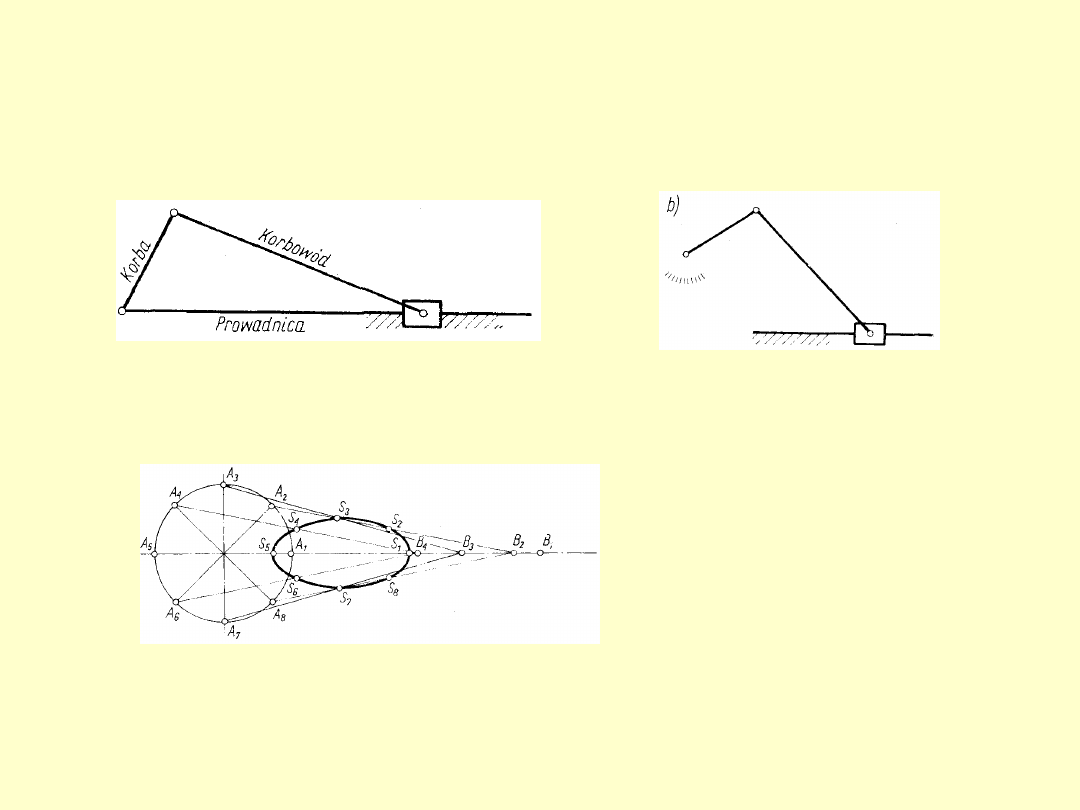
Mechanizmy jarzmowe
) z jarzmem wirującym
z jarzmem wahadłowym
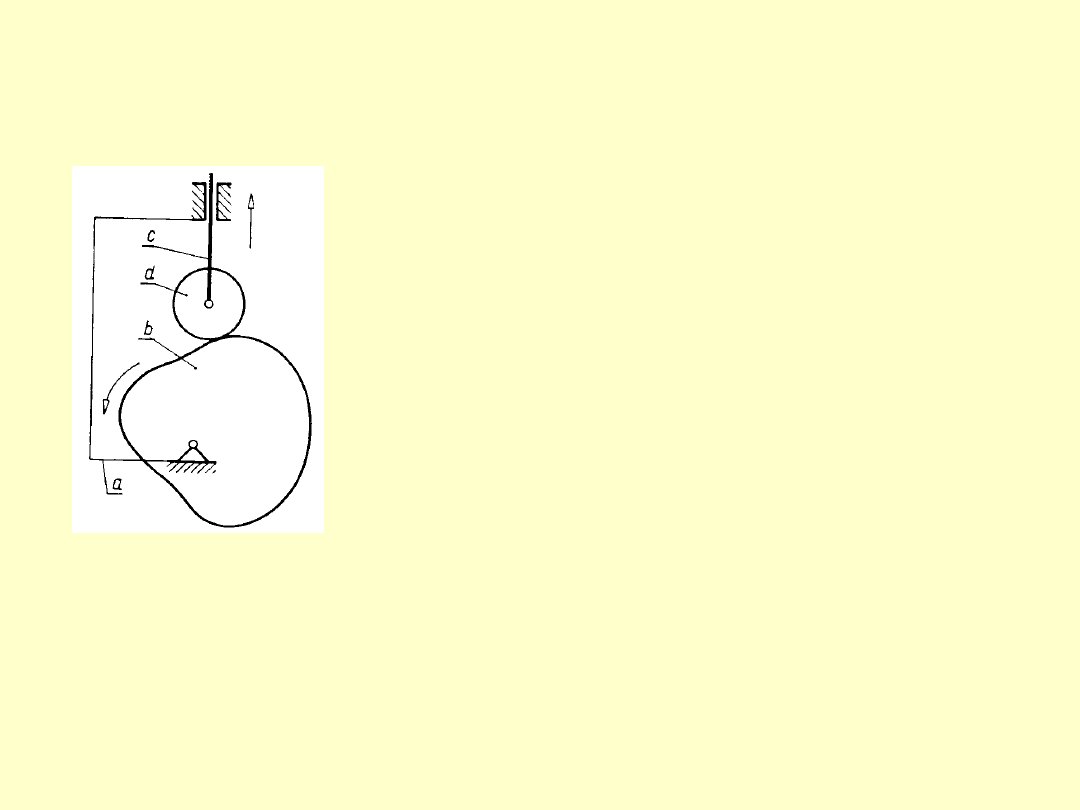
Mechanizmy krzywkowe
a
– podstawa
b
– krzywka
c
– popychacz,
d
– człon pośredniczący :
Krzywka porusza się ruchem
obrotowym,
a popychacz – ruchem postępowo-
zwrotnym lub wahadłowym.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
Wyszukiwarka
Podobne podstrony:
wykl mechanika budowli 01 wstep przypomnienie praca na przemieszczeniach
wykl mechanika budowli 11 linie wplywu belki ciaglej
Wykl Mechanika Budowli 15 Opis Ruchu Drgania Wlasne Tlumione
wykl mechanika budowli 01 wstep przypomnienie praca na przemieszczeniach
Wykl Mechanika Budowli 13 Metoda Przemieszczen
wykl mechanika budowli 09 metoda sil cd
wykl mechanika budowli 07 twierdzenie o wzajemnosci
wykl mechanika budowli 02 praca sil wewnetrznych(1)
wykl mechanika budowli 12 luki statycznie niewyznaczalne
wykl mechanika budowli 04 rownanie pracy wirtualnej(1)
wykl mechanika budowli 06 metoda ciezarow sprezystych
wykl mechanika budowli 18 statecznosc ukladow pretowych
wykl mechanika budowli 15 opis ruchu drgania wlasne tlumione
wykl mechanika budowli 22 metoda crossa
Siły wewnętrzne w ustrojach statycznie wyznaczalnych, Energetyka Politechnika Krakowska Wydział Mech
06 Wykł 06L Mechanika kwantowaid 6171 ppt
Mechanika techniczna(12)
więcej podobnych podstron