
Systemy czasu rzeczywistego
Trzy składowe nazwy "system czasu
rzeczywistego"
•System
•Czas
•Rzeczywisty

Systemy czasu rzeczywistego
Zasadniczo rozróżniamy dwa typy systemów
czasu rzeczywistego:
systemy z twardymi ograniczeniami czasowymi
(hard real time)
systemy z miękkimi ograniczeniami czasowymi (soft
real time)

Systemy czasu rzeczywistego
W przypadku systemów czasu rzeczywistego system
musi zapewniać mechanizm, który sprawdza, czy każde
nowe zadanie dostarczone do systemu ma szansę
wykonać się w terminie nie zaburzając terminów
innych zadań oraz tak przydzielać procesor do zadań
już złożonych, aby zagwarantować dotrzymanie przez
te zadania ich terminów.

Systemy czasu rzeczywistego
Jest sprawą oczywistą, że aby poprawnie zaprojektować
system czasu rzeczywistego musimy znać metody
planowania zadań i gwarantowania terminów.
Te metody stanowią teoretyczną podbudowę i muszą
być znane i rozumiane przez każdą osobę która
będzie zajmować się projektowaniem takich systemów.
Tej tematyce jest poświęcony wykład.
Typy systemów sterujących
•Systemy monitorujące
•Systemy kontrolne bez sprzężenia zwrotnego
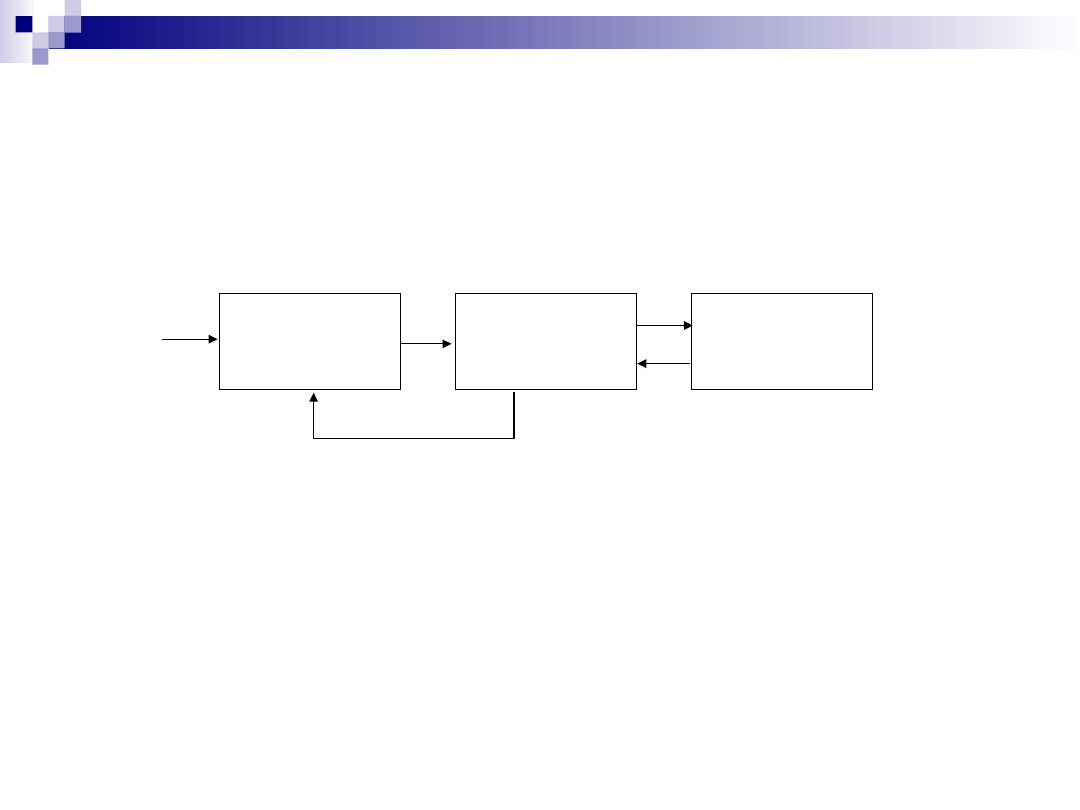
•Systemy kontrolne ze sprzężeniem zwrotnym
Kontroler RT
Kontrolowany
system
Środowisko
Input
Systemy monitorujące
Środowisko
System RT
Użytkownik
Display
Sensor
Sensor
Sensor
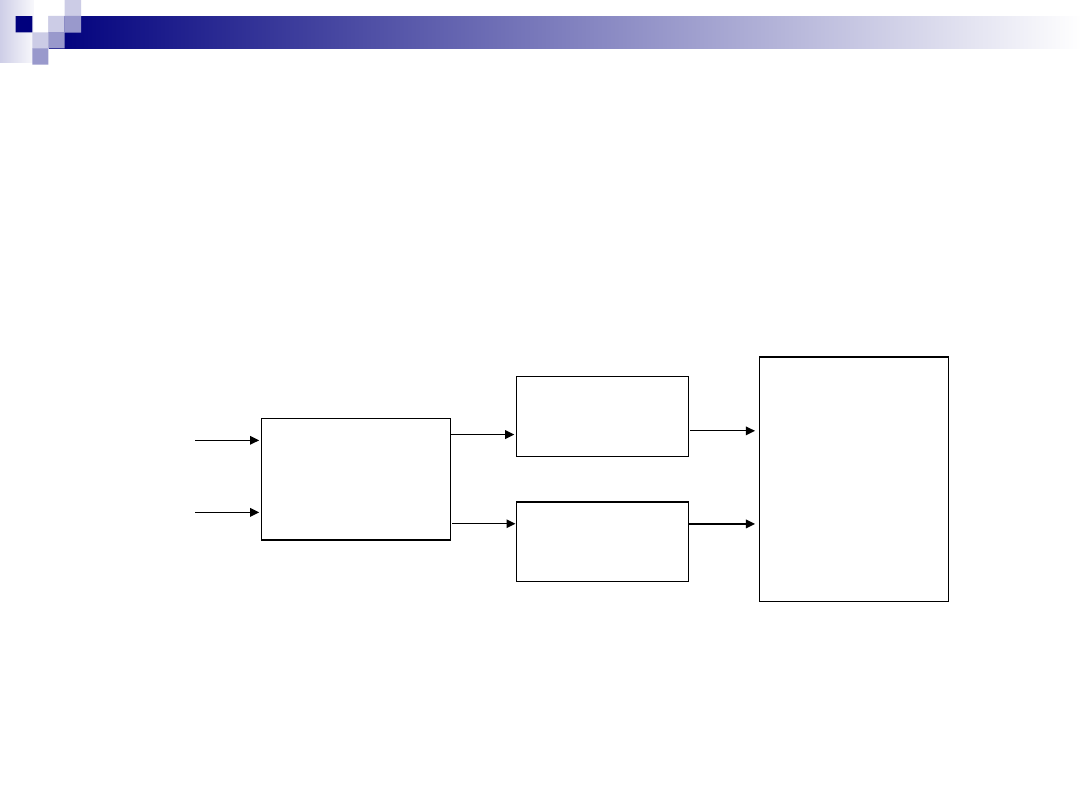
Systemy bez sprzężenia zwrotnego
System RT
Środowisko
Aktuator
Aktuator
Dane
użytkownika
Odczyty
sensorów
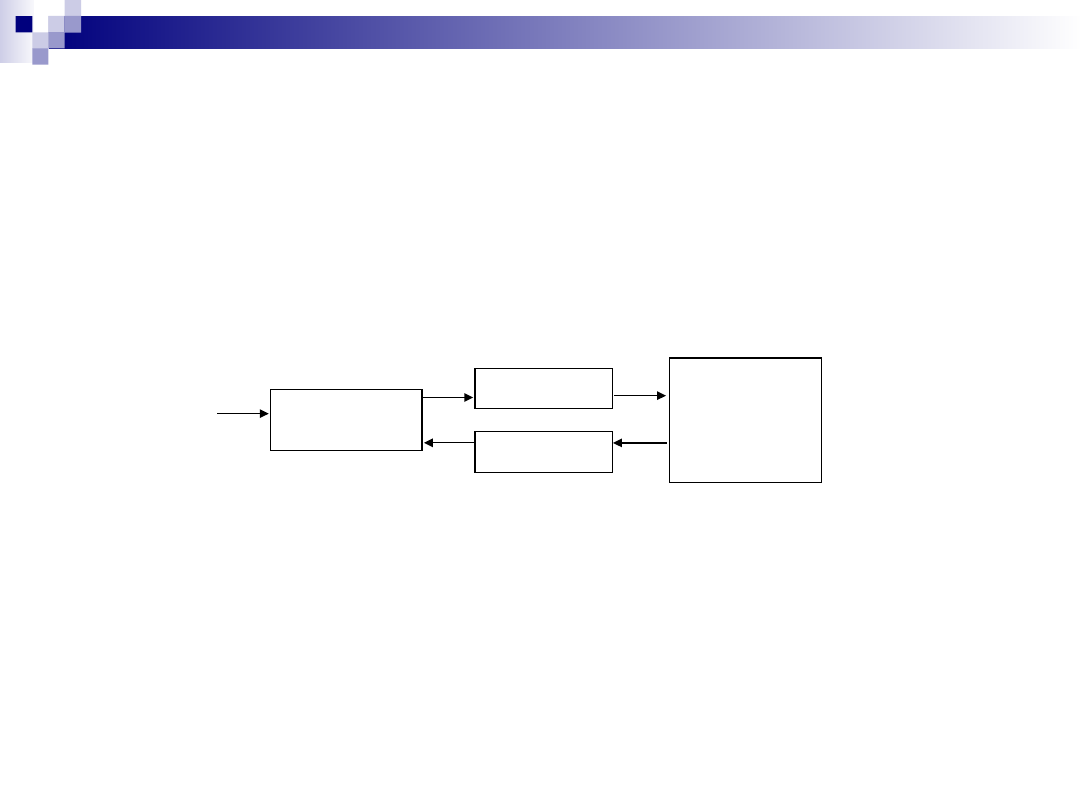
Systemy ze sprzężeniem zwrotnym
System RT
Środowisko
Aktuator
Sensor
Dane
użytkownika

Systemy ze sprzężeniem zwrotnym
Poprawny dobór parametrów czasowych jest kluczowy
dla
poprawnego działania systemu.
Przykład:
Ramię robota przesuwane z położenia 0 do położenia 1,
prędkość w punkcie 1 ma być równa 0.
Położenie x=1-exp(-t), t – czas
Prędkość v=exp(-t)

Systemy ze sprzężeniem zwrotnym
Położenie x=1-exp(-t), t – czas
Prędkość v=exp(-t)
Sensor odczytuje z okresem T położenie x ramienia i na
tej podstawie oblicza prędkość, z jaką należy przesuwać
ramię.
Faktycznie obliczane jest np. napięcie podawane na silnik
krokowy napędzający ramię robota, im większe napięcie
tym większa prędkość.
Czy dla każdego T można wysterować ramię robota?
Sprawdzić przykład w Excelu uwzględniając czas
hamowania.

Systemy ze sprzężeniem zwrotnym
Z drugiej strony zbyt częste próbkowanie nie ma sensu:
Przykład: nieustalone stany mechanicznych
przełączników
Częstość próbkowania sygnału może być określona z
wykorzystaniem tw. Nyquista.

Systemy ze sprzężeniem zwrotnym
W niektórych przypadkach nawet poprawne
zaprojektowanie systemu może nie zapewnić jego
kontroli.
Przykład: system używany niezgodnie z przeznaczeniem
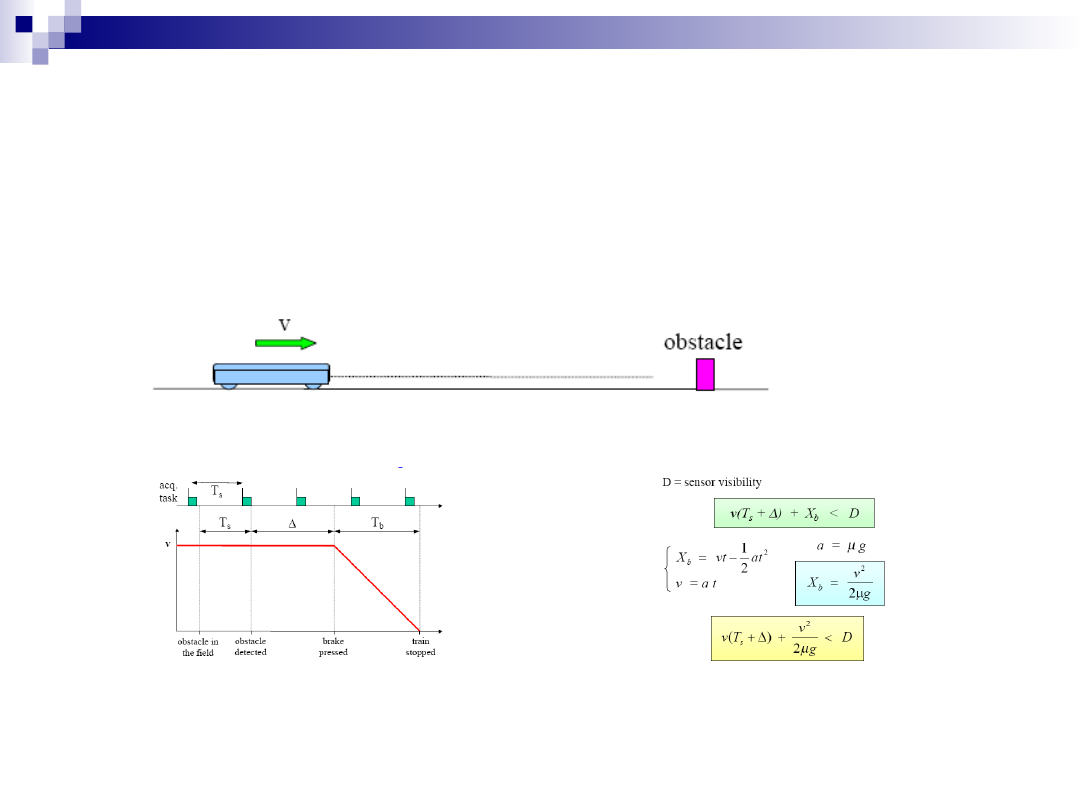
Systemy ze sprzężeniem zwrotnym
System wizyjny pociągu

Systemy czasu rzeczywistego
Systemy czasu rzeczywistego, to systemy, przy
konstrukcji których poważnie bierze się pod
uwagę prawa Murphi’ego.
Wymagania:
•
Spełnienie wymagań czasowych
•
Projektowany do spełnienia funkcji przy
maksymalnym możliwym obciążeniu
•
Przewidywalność (co się stanie w momencie
przeciążenia)
•
Odporność na błędy softwarowe i hardwarowe
•
Modularna struktura

Systemy czasu rzeczywistego
Tak więc podstawową cechą systemów czasu
rzeczywistego jest przewidywalność.
Po złożeniu zadania i zaakceptowaniu go przez system
czasu rzeczywistego mamy gwarancję, że zadanie
zostanie wykonane w określonym terminie.
Faktycznie chcielibyśmy, aby systemy czasu
rzeczywistego były niezawodne nawet w
przypadku awarii sprzętu lub oprogramowania.
Spełnienie tego wymagania jest możliwe poprzez
zapewnienie nadmiarowego sprzętu uruchamianego w
przypadku awarii sprzętu podstawowego poprzez
składową systemu tzw. watchdoga.

Systemy czasu rzeczywistego
Tak więc podstawową cechą systemów czasu
rzeczywistego jest przewidywalność.
Po złożeniu zadania i zaakceptowaniu go przez system
czasu rzeczywistego mamy gwarancję, że zadanie
zostanie wykonane w określonym terminie.
Faktycznie chcielibyśmy, aby systemy czasu
rzeczywistego były niezawodne nawet w
przypadku awarii sprzętu lub oprogramowania.
Spełnienie tego wymagania jest możliwe poprzez
zapewnienie nadmiarowego sprzętu uruchamianego w
przypadku awarii sprzętu podstawowego poprzez
składową systemu tzw. watchdoga.

Systemy czasu rzeczywistego
Aby analizować planowalność dla określonego
zbioru zadań musimy najpierw przyjąć jakiś
model systemu czasu rzeczywistego.
Składowe systemu:
•zadania periodyczne
•zadania sporadyczne
•zadania aperiodyczne

Parametry czasowe zadań
Parametry czasowe zadań:
•czas złożenia (arrival time) a
•czas wykonania (computation time) C
•termin (deadline) d
•względny termin D
•czas startu (start time) s
•czas zakończenia (finishing time) f
•opóźnienie (lateness) L=f-d
•czas przekroczenia terminu (exceeding time)
E=max(0,L)
•zapas czasu w chwili złożenia (laxity, slack time) X=d-
a-C
Slack jest faktycznie funkcją czasu X=X(t) jeżeli
zadanie się wykonuje, to jego slack wynosi X(t)=d-t-
c(t), gdzie c(t) to ilość czasu CPU potrzebna do
zakończenia wykonywania zadania

Parametry czasowe zadań
Kolejnym parametrem czasowym jest rodzaj
rozkładu czasów między złożeniami:
•procesy periodyczne (faza procesu, okres procesu,
czas wykonania, terminy są ustalone)
•aperiodyczne a
i+1
>a
i
•sporadyczne a
i+1
>a
i
+T
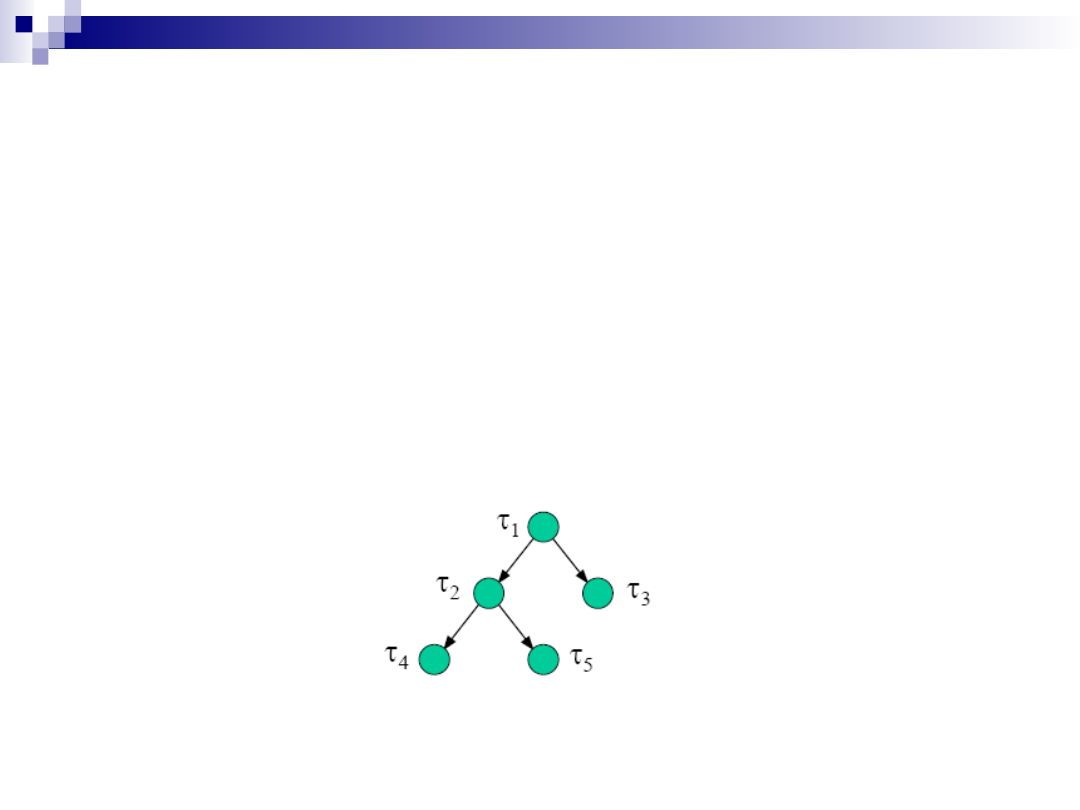
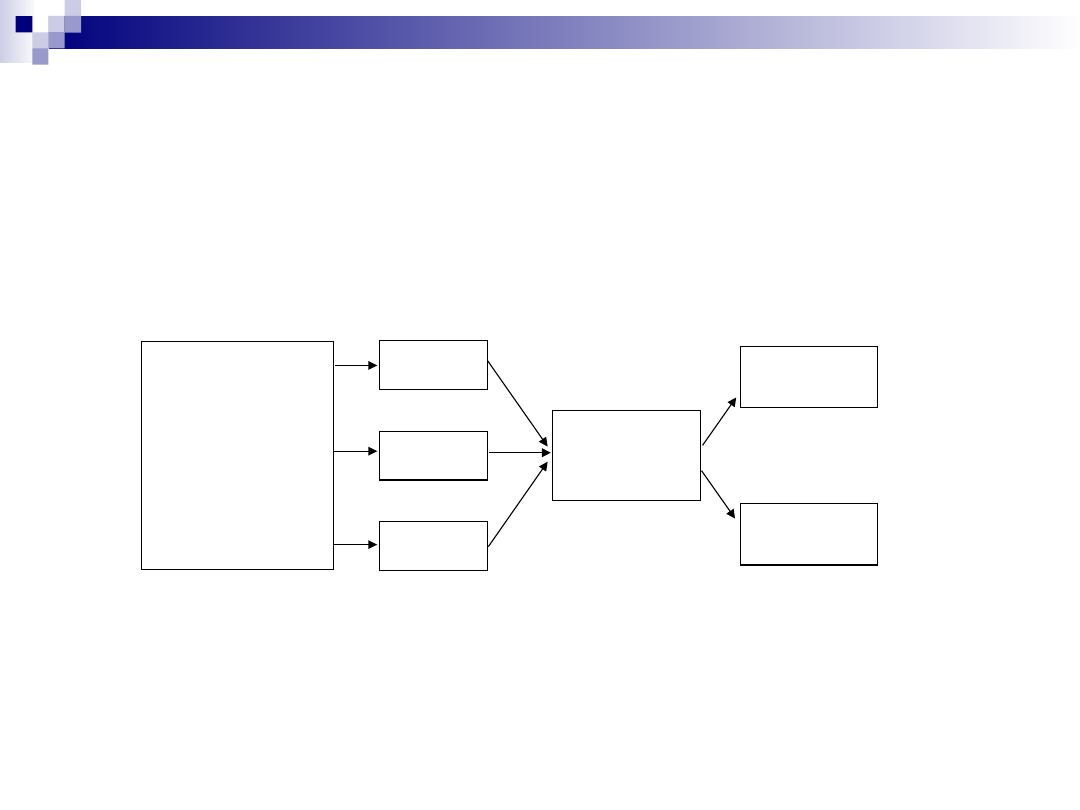
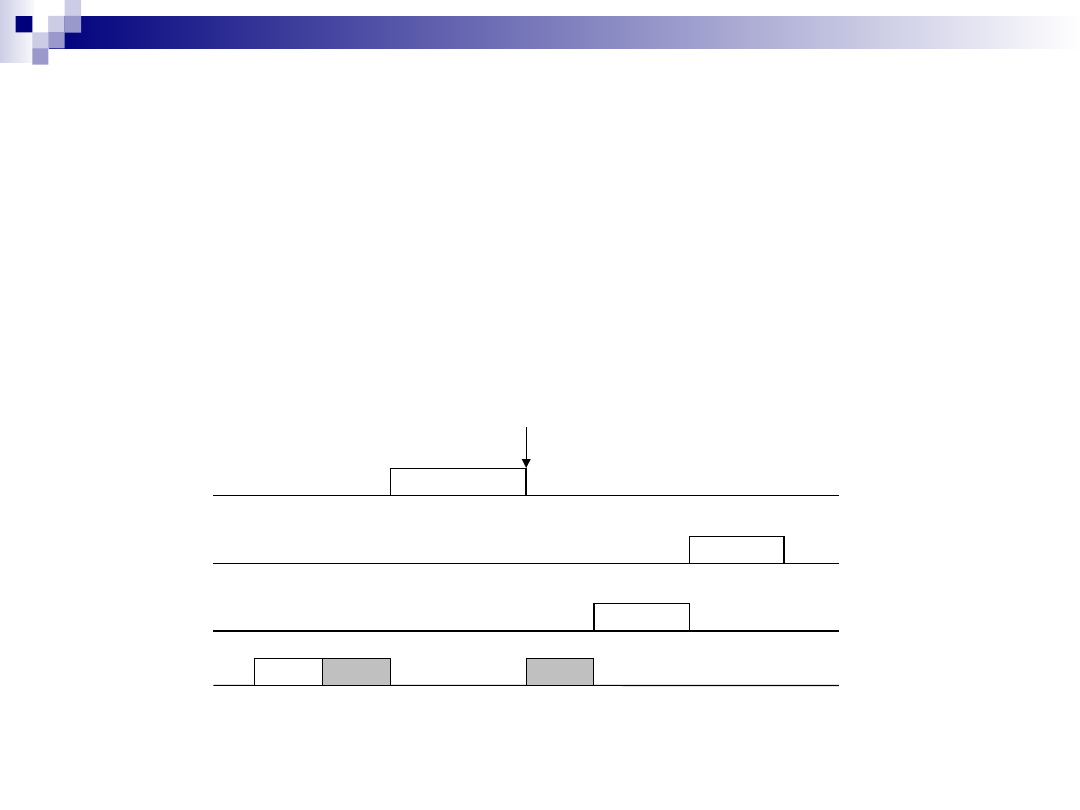
Więzy kolejności wykonania
Więzy kolejności wykonania specyfikuje się poprzez
podanie skierowanego acyklicznego grafu, w którym
zadania są reprezentowane przez węzły, a relacje
kolejności przez łuki.
Graf kolejności narzuca relację częściowego
uporządkowania w zbiorze zadań.
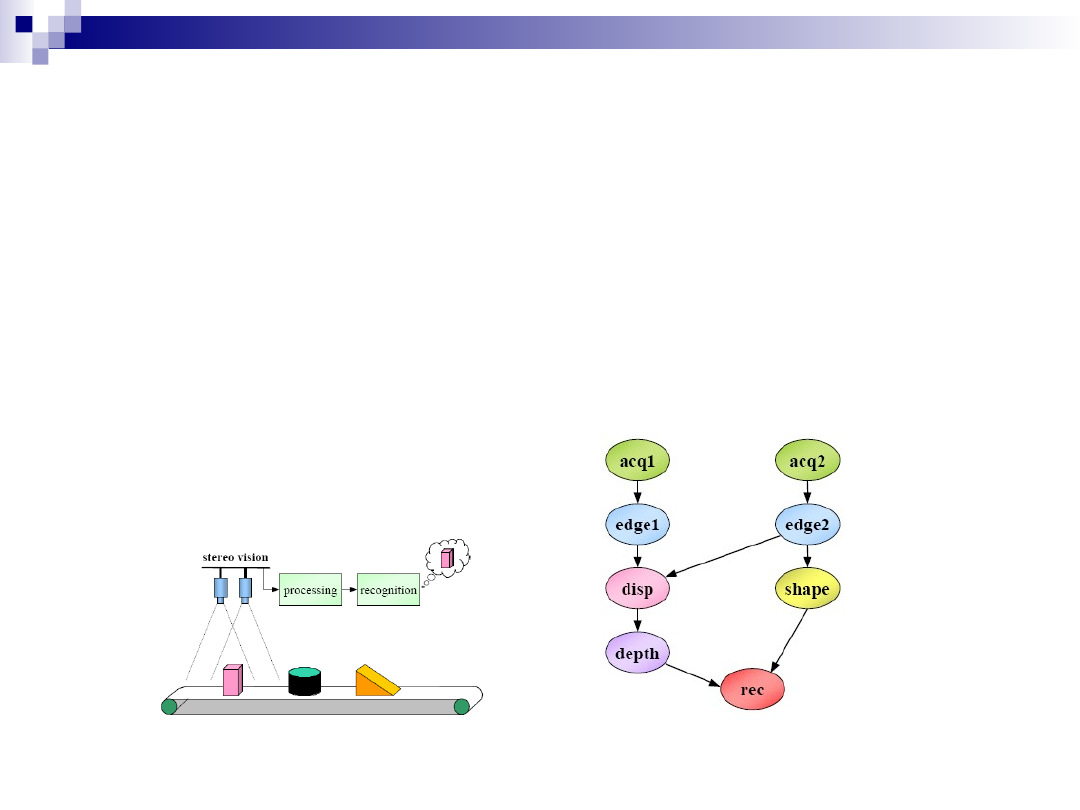
Więzy kolejności wykonania
Przykład:
Celem systemu jest rozpoznanie rodzaju obiektów
poruszających się na taśmie w celu np uruchomienia
robota sortującego. Rozpoznanie opiera się na odczycie
z dwóch kamer.
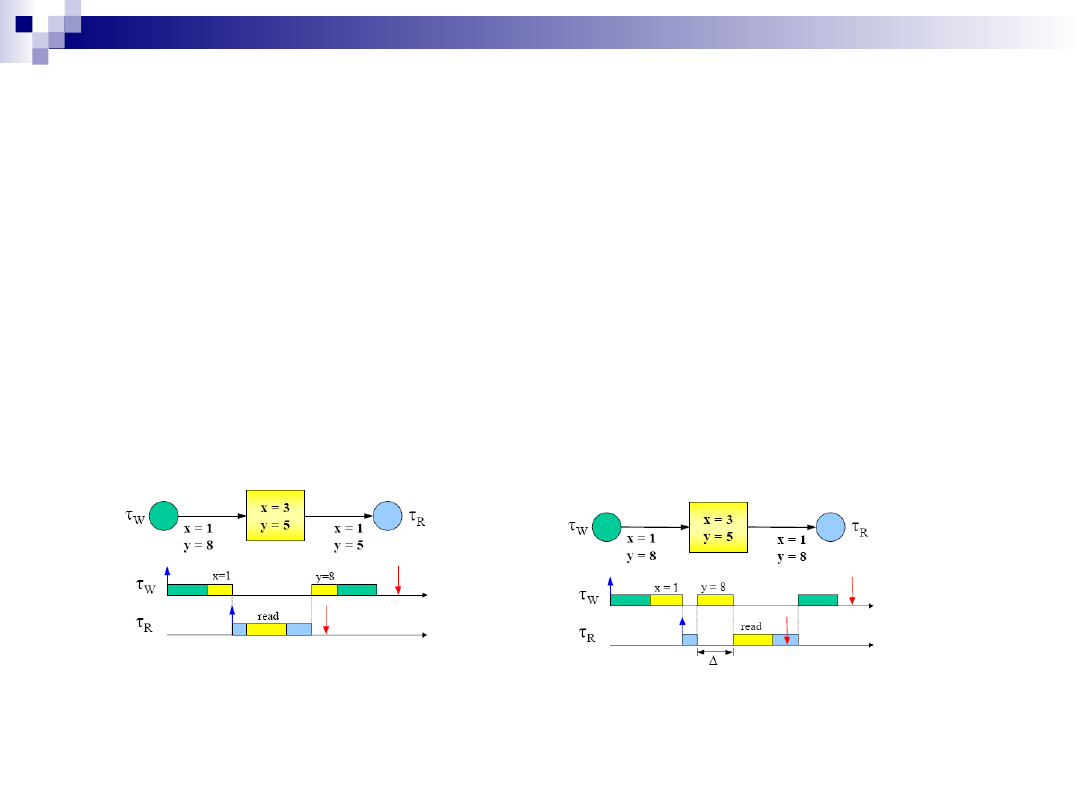
Dostęp do zasobów
Aby zapewnić integralność danych, dostęp do zasobów
dzielonych musi następować na zasadzie wzajemnego
wykluczania.
Nieprawidłowy dostęp
Prawidłowy dostęp
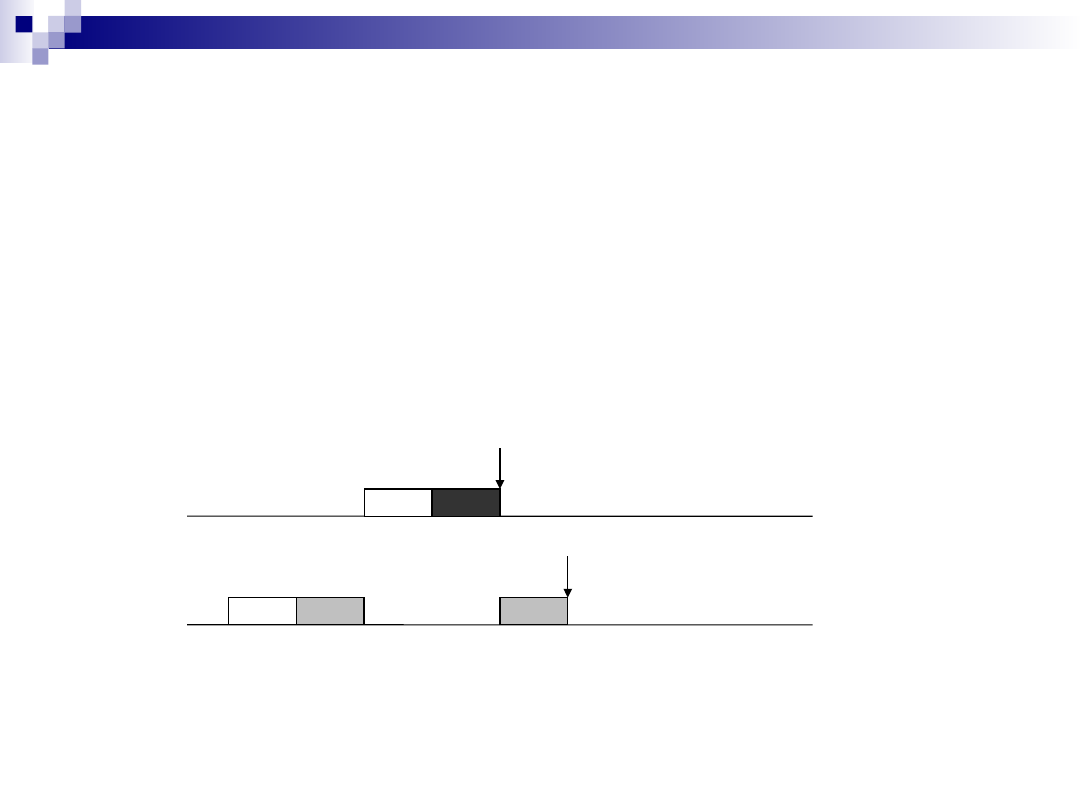
Dostęp do zasobów
Standardowe semafory POSIX mają dwie wady:
•mogą prowadzić do zakleszczenia
•czas blokowania jest nieograniczony (odwrócenie
priorytetów)
żądanie zasobu
szarego
żądanie zasobu
czarnego
Dostęp do zasobów
Standardowe semafory POSIX mają dwie wady:
•mogą prowadzić do zakleszczenia
•czas blokowania jest nieograniczony (odwrócenie
priorytetów)
żądanie zasobu
szarego
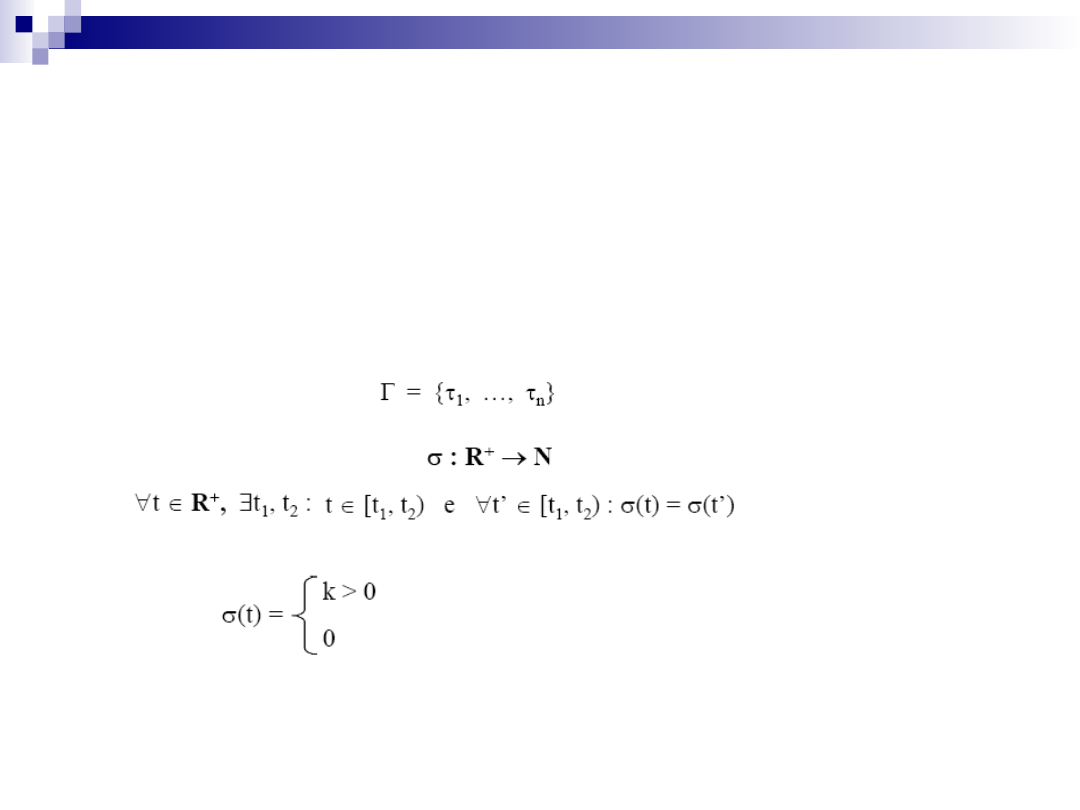
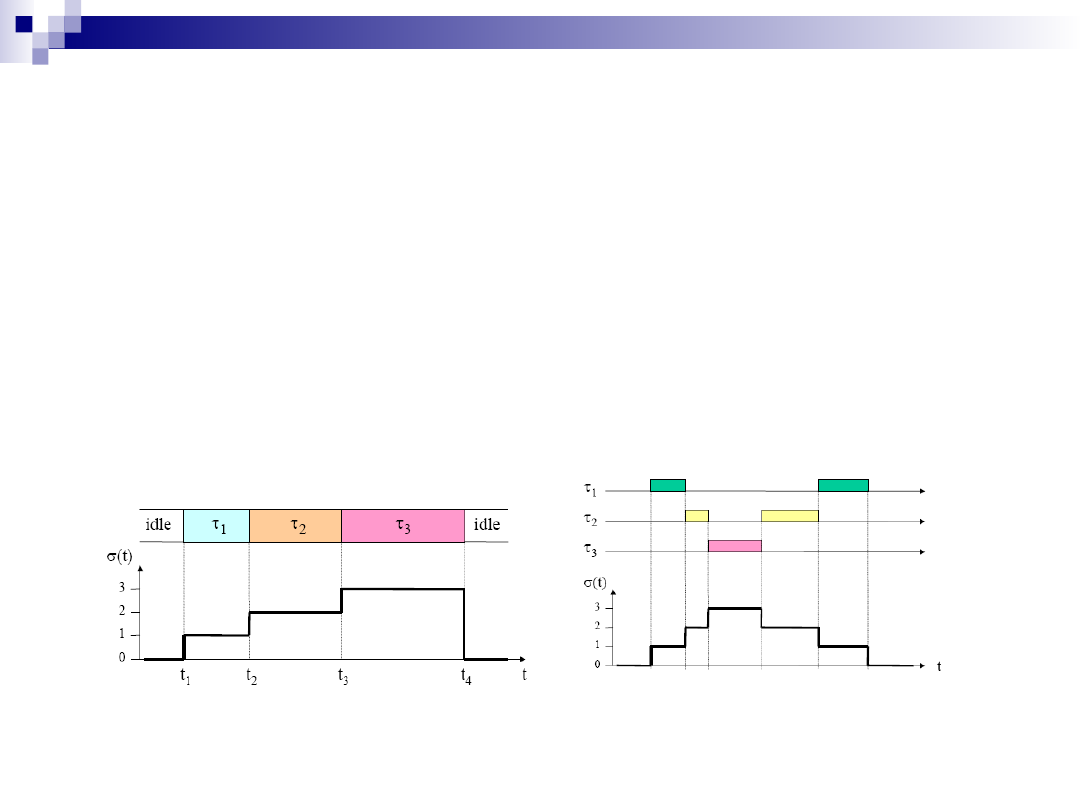
Plan
Zdefiniowanie więzów czasowych, kolejności
wykonania i dostępu do zasobów to krok konieczny
przed skonstruowaniem planu wykonania.
Plan to odwzorowanie
takie, że
k
jest wykonywane
procesor jest bezczynny

Plan
Mamy dane trzy zbiory:
zbiór zadań J={J1,J2,J3....,Jn}
zbiór procesorów P={P1,P2,...Pm}
zbiór zasobów R={R1,R2,...Rs}
Ponadto mamy DAG określający więzy kolejności i
więzy czasowe.
Problem planowania to znalezienie takiego
przyporządkowania procesorów i zasobów zadaniom, aby
spełnić wszystkie ograniczenia czasowe.
Problem w ogólności jest NP-zupełny.
W pewnych warunkach, czasem o praktycznym znaczeniu
można problem przydziału rozwiązać w czasie
wielomianowym. Można rozpatrywać systemy
jednoprocesorowe, brak wywłaszczenia, ustalone priorytety
dla zadań itp.
Klasyfikacja algorytmów planujących
Plan jest dopuszczalny (feasible) jeżeli gwarantuje
dotrzymanie wszystkich terminów.
Zbiór zadań jest planowalny, jeżeli istnieje dla niego
dopuszczalny plan.
Algorytmy bez wywłaszczenia i z wywłaszczeniem:

Klasyfikacja algorytmów planujących
Off-line
On-line
Optymalne
Funkcje używane do mierzenia jakości algorytmu:
Średni czas odpowiedzi:
średnia (fi-ai)
Całkowity czas zakończenia:
max(fi)-
min(ai)
Maksymalne opóźnienie:
max(fi-di)
Maksymalna liczba spóźnionych zadań:
suma
miss(fi)
Heurystyczne
Zwykłe systemy operacyjne
Klasyczne algorytmy szeregujące nie są odpowiednie do
szeregowania zadań czasu rzeczywistego ponieważ nie
gwarantują dotrzymania terminu.
FIFO
niewywłaszczalny, dynamiczny, on-line
bardzo nieprzewidywalny czas wykonania, zależny od czasu przybycia
Zwykłe systemy operacyjne
Klasyczne algorytmy szeregujące nie są odpowiednie do
szeregowania zadań czasu rzeczywistego ponieważ nie
gwarantują dotrzymania terminu.
FIFO
niewywłaszczalny, dynamiczny, on-line
bardzo nieprzewidywalny czas wykonania, zależny od czasu przybycia
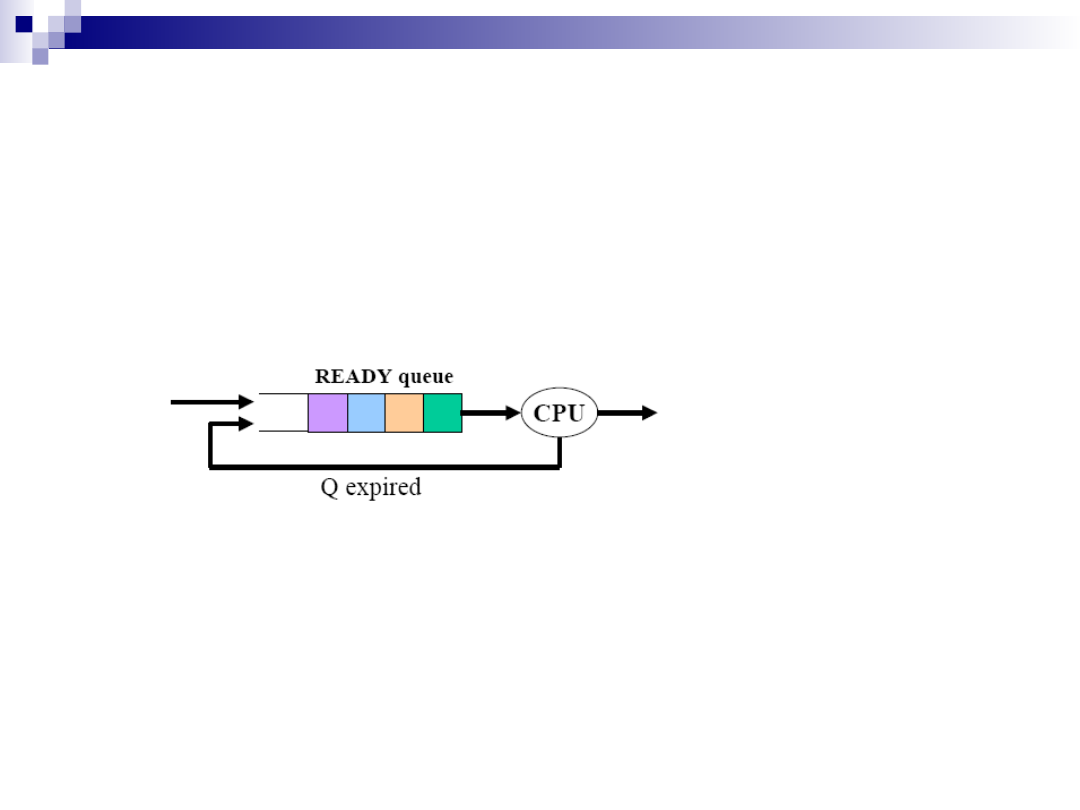
Zwykłe systemy operacyjne
Algorytm karuzelowy
Niebezpieczeństwa związane z algorytmem karuzelowym:
skończona długość slice'u czasowego.

Zwykłe systemy operacyjne
Planowanie na podstawie priorytetów:
Przyporządkowujemy priorytety do zadań.
Zadania o wyższym priorytecie mają
pierwszeństwo.
Jeśli priorytet proporcjonalny do odwrotności
czasu złożenia to metoda równoważna FIFO,
jeśli do odwrotności czasu wykonania to SJF.
Problemem jest głodzenie (długi czas
oczekiwania dla jobów o niskim priorytecie) -
ewentualnie można zwiększać priorytet w
zależności od czasu oczekiwania na przydział
procesora.
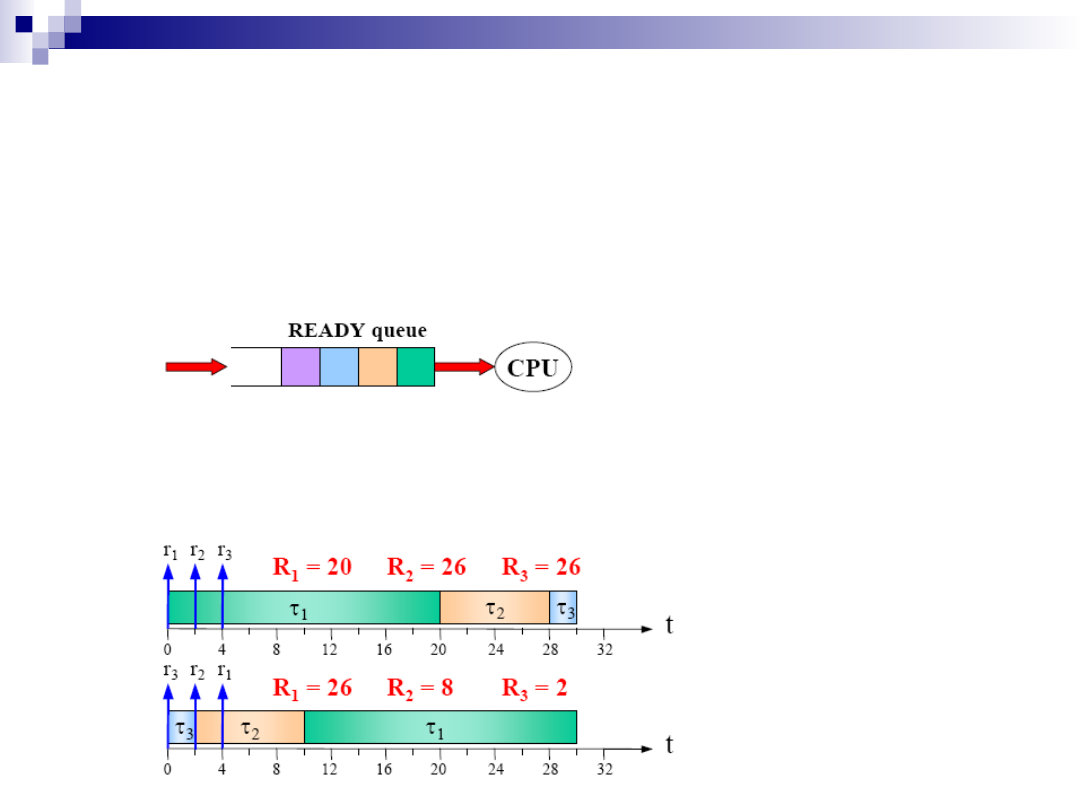
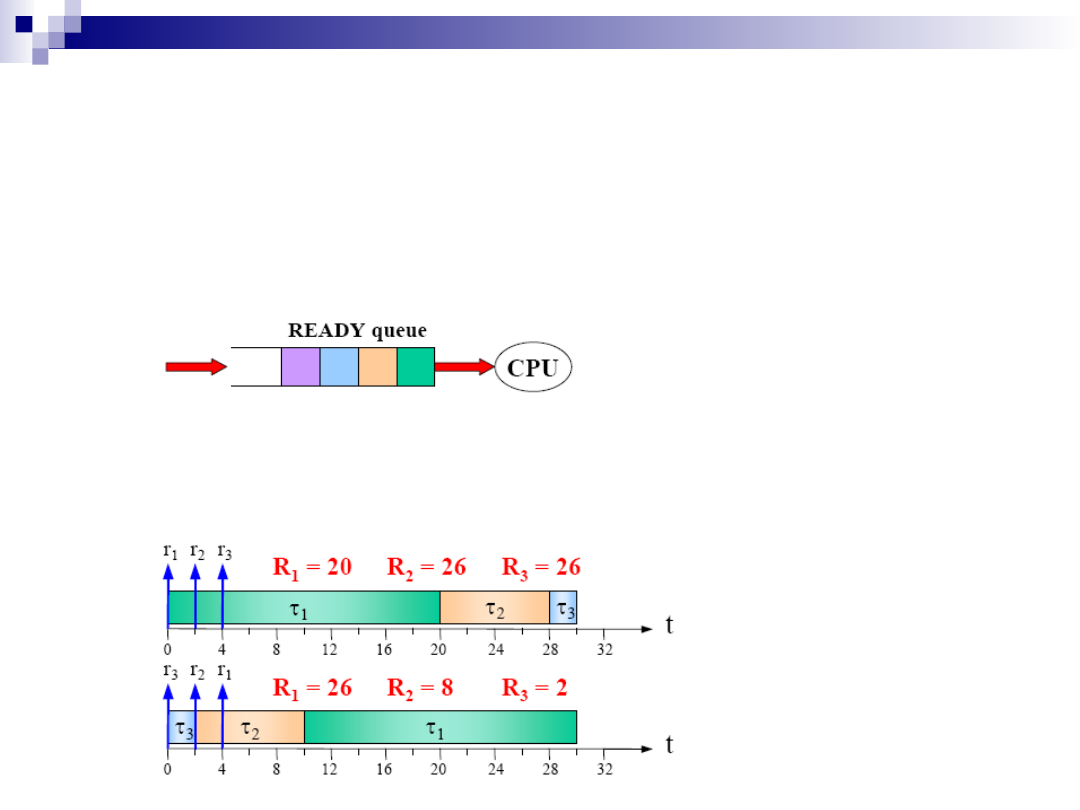
Zwykłe systemy operacyjne
Algorytmem minimalizującym średni czas
odpowiedzi jest algorytm Shortest Job First.
Przed wstawieniem jobu do kolejki planista
musi znać czas wykonania jobu, który jest
ustalony.
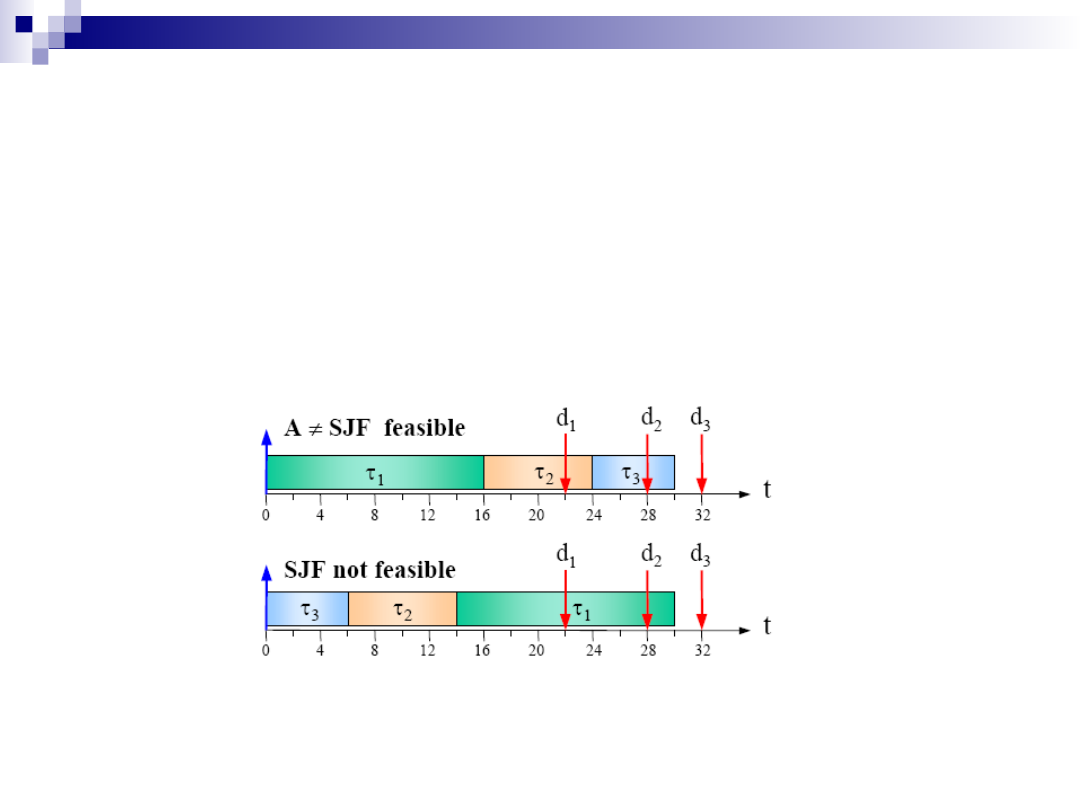
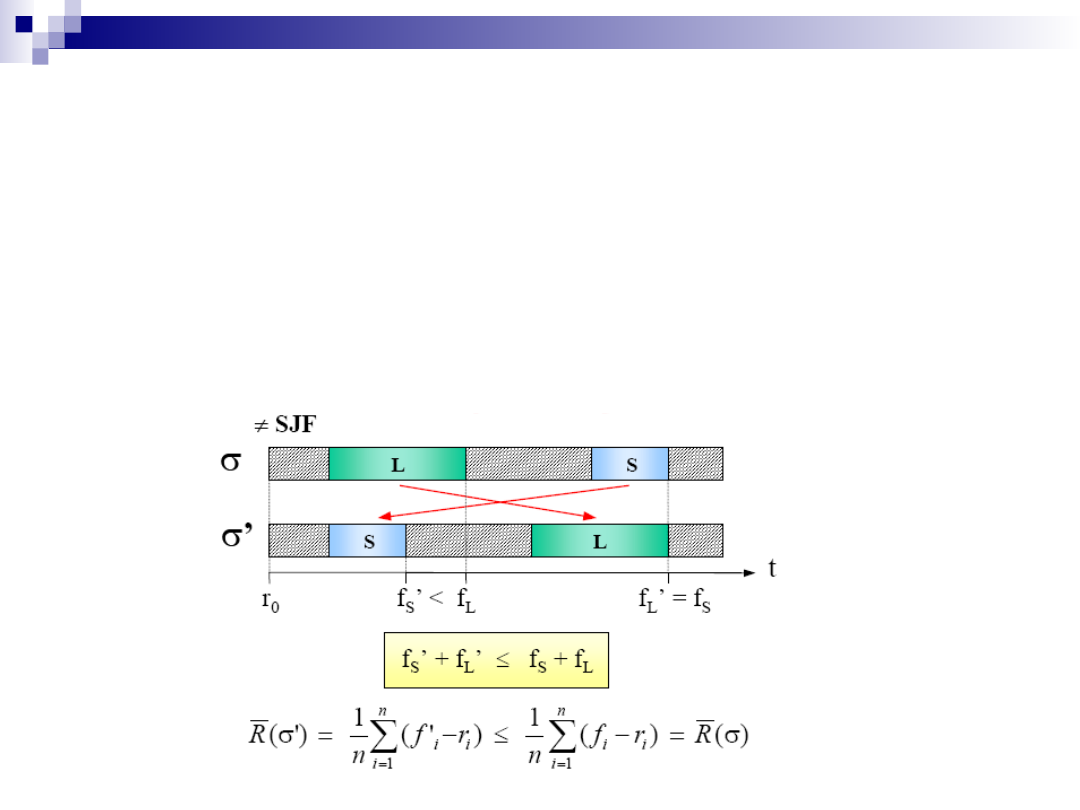
Zwykłe systemy operacyjne
SJF nie jest optymalny:

Zwykłe systemy operacyjne
Niepożądane cechy systemów operacyjnych:
•Skończona liczba priorytetów
•Zastosowanie semaforów może prowadzić do zakleszczenia i
zawieszenia systemu: jeśli zagnieżdżone sekcje krytyczne.
•W systemach czasu rzeczywistego pamięć powinna być
alokowana w sposób statyczny
•Zadania realizowane przez jądro systemu powinny mieć
ograniczony czas działania
Cechy sprzętowe, które są źródłem nieprzewidywalności.
•DMA
•Cache
•Przerwania
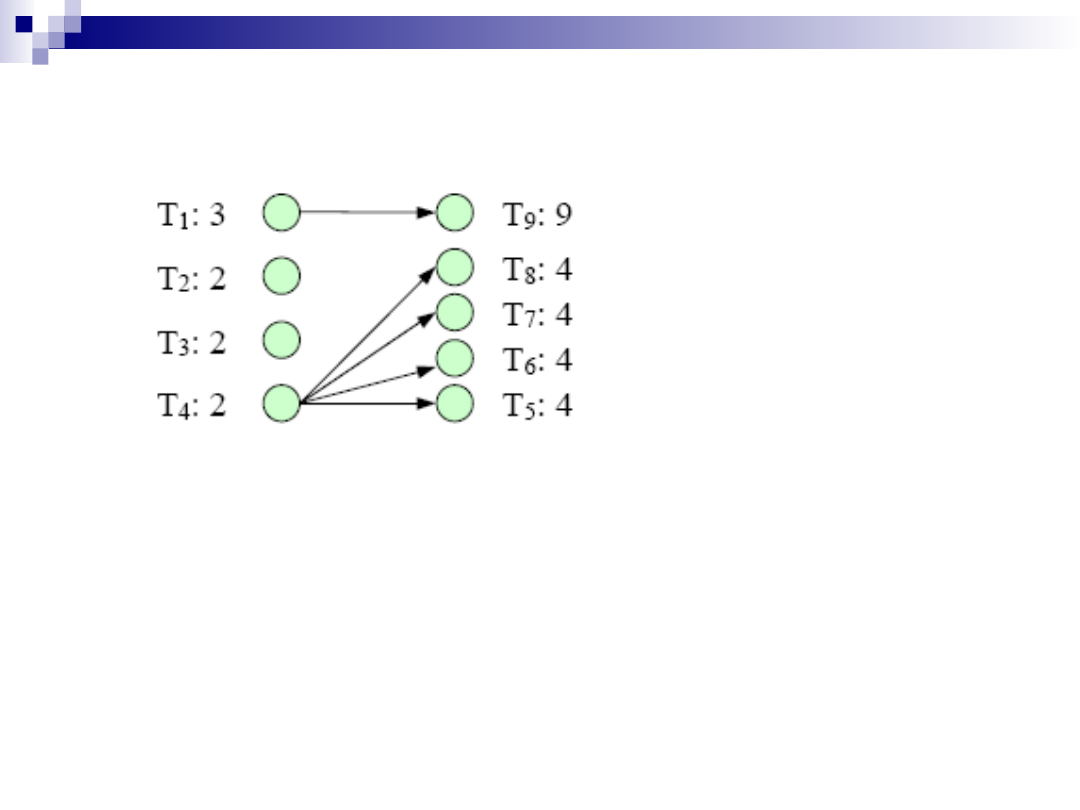
Anomalie szeregowania
Rozważmy planowanie tego zbioru na trzech
procesorach priorytety są od najwyższego 1 do
najniższego 9.
Dodajmy jeden więcej procesor.
Zmniejszmy czas wykonania każdego zadania o 1
na trzech procesorach.
Usuńmy wszystkie więzy na trzech procesorach.
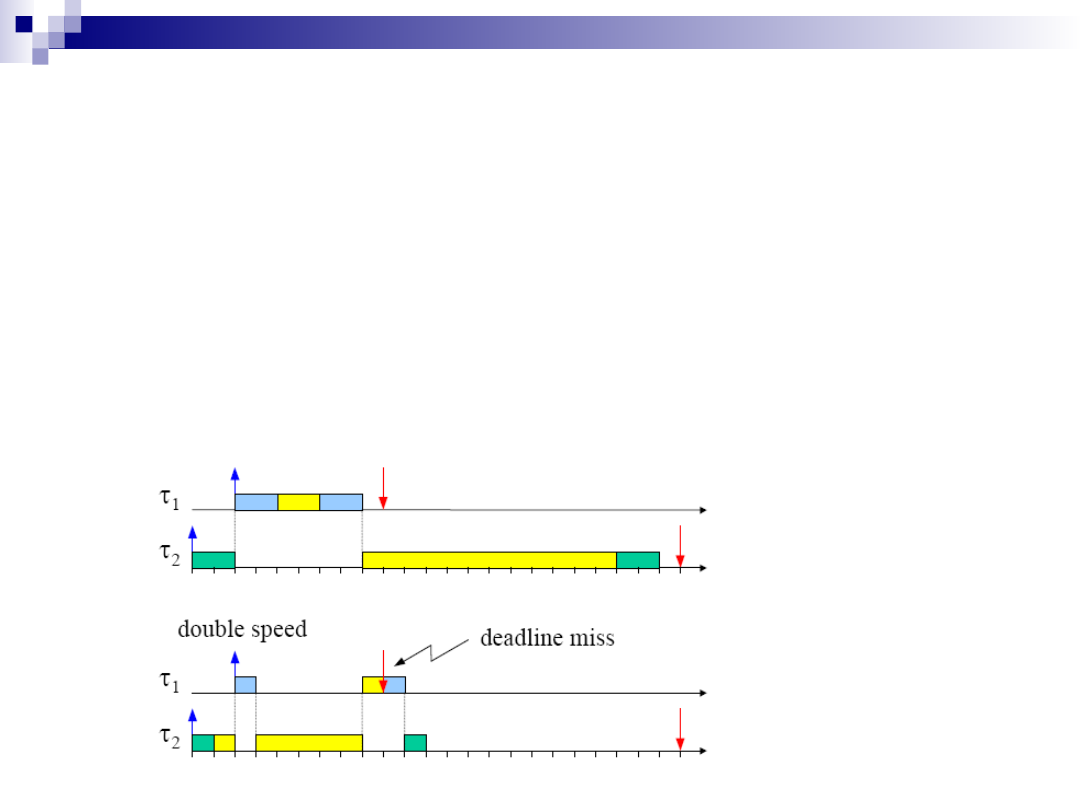
Anomalie szeregowania
Dwa razy szybszy procesor dla układu w
którym jest dostęp do wspólnych zasobów:
J1 złożony w czasie 2, wykonuje się na wolnym
procesorze (2,2,2) gdzie pogrubienie oznacza
sekcje krytyczną, termin 9
J2 złożony w czasie 0 wykonuje się na wolnym
procesorze (2,12,2), termin 23.
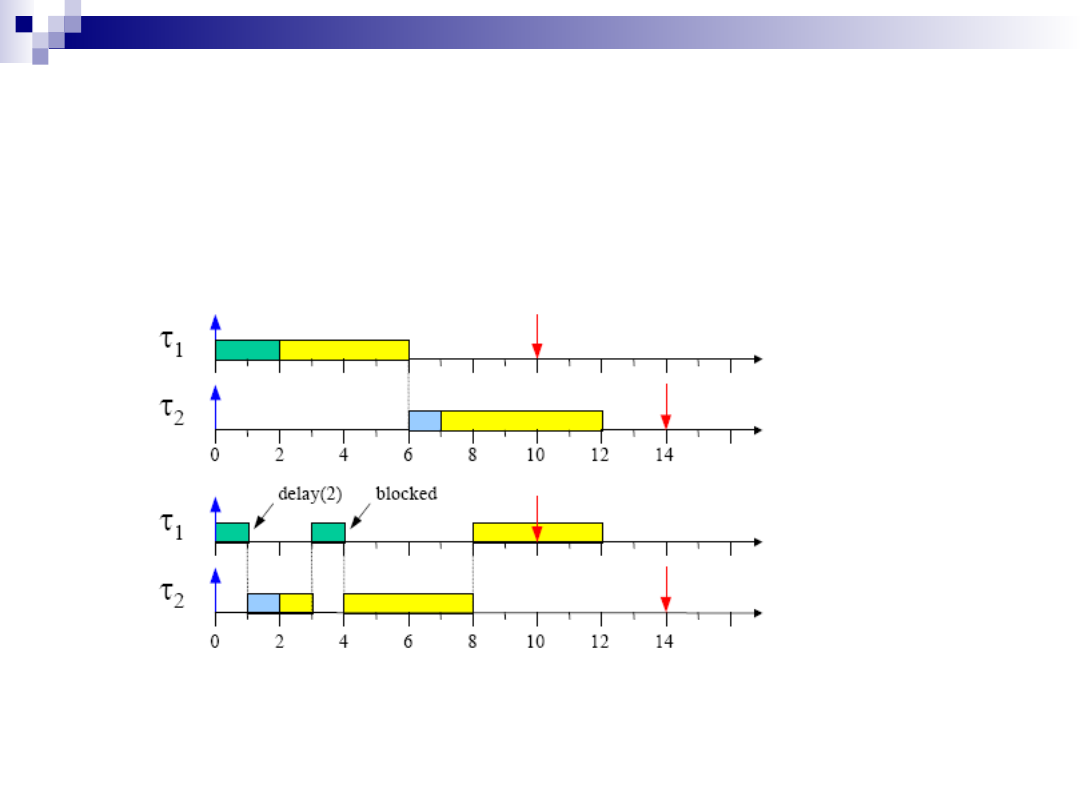
Anomalie szeregowania
Operacja delay()

Przewidywalność
Czasy wykonania zadań są w zadanym przedziale
(Cmin,Cmax).
Przewidywalność wykonania planu:
Minimalny plan: plan wyprodukowany, gdy czasy
wszystkich zadań są minimalne.
Maksymalny plan: plan wyprodukowany, gdy czasy
wszystkich zadań są maksymalne.
Przewidywalność czasu startu
Przewidywalność czasu zakończenia

Przewidywalność
TWIERDZENIE
Wykonanie zbioru wywłaszczalnych zadań o
ustalonych czasach złożenia jest przewidywalne na
jednym procesorze, jeżeli zadania są planowane
algorytmem wykorzystującym priorytety.

Przewidywalność
Załóżmy, że mamy zbiór zadań o ustalonych priorytetach
{J
1
,J
2
,J
3
...J
n
}.
Wykonanie J
1
- zadania o najwyższym priorytecie -
jest przewidywalne. Wg dowolnego schematu
startuje zawsze w momencie złożenia i wykonuje się
w czasie należącym do przedziału (r
1
+C
1,min
, r
1
+C
1,max
).
Załóżmy, że wykonanie zadań J
1
,J
2
,...J
i-1
jest
przewidywalne.
Pokażemy, że wykonanie J
i
jest też przewidywalne tj.
S
min
(J
i
)<=S(J
i
)<=S
max
(J
i
) i f
min
(J
i
)<=f(J
i
)<=f
max
(J
i
).

Przewidywalność
Załóżmy, że czas startu nie jest przewidywalny:
Musi być albo S(J
i
)<S
min
(J
i
) albo S(J
i
)>S
max
(J
i
).
Weźmy przypadek S(J
i
)>S
max
(J
i
).
Czas startu nie może być wcześniejszy od czasu
złożenia czyli:
r
i
<=S
max
(J
i
).

Przewidywalność
Wg dowolnego planu J
i
nie może wystartować dopóki nie
wykonają się wszystkie zadania o priorytecie wyższym, niż J
i
i czasie startu wcześniejszym niż S(J
i
) tzn:
f(J
k
)< =S(J
i
) dla każdego k<i takiego, że r
k
<S(J
i
).
Dla maksymalnego planu mamy:
f
max
(J
k
)<=S
max
(J
i
) dla każdego k<i takiego, że
r
k
<S
max
(J
i
).
Z przewidywalności k<i i nieprzewidywalności Ji mamy:
f(J
k
)<=f
max
(J
k
)<=S
max
(J
i
)<S(J
i
) dla każdego k<i takiego,
że r
k
<S
max
(J
i
).

Przewidywalność
Jeżeli w czasie S
max
(J
i
) J
i
nie startuje,
to albo procesor pozostaje bezczynny,
albo wykonują się zadania o niższym priorytecie, co
jest sprzeczne z założeniami.

Przewidywalność
Weźmy przypadek S(J
i
)<S
min
(J
i
).
Czas startu nie może być wcześniejszy od czasu złożenia
czyli:
r
i
<=S
min
(J
i
).
Dla minimalnego planu mamy:
f
min
(J
k
)<=S
min
(J
i
) dla każdego k<i takiego, że
r
k
<S
min
(J
i
).
Wg dowolnego planu z przewidywalności k<i wynika,
że f(J
k
)>f
min
(J
k
) więc może istnieć takie k, że:
f
min
(J
k
)<=S
min
(J
i
)<f(J
k
) dla pewnego k<i takiego, że
r
k
<S
min
(J
i
).

Przewidywalność
Gdyby wg takiego planu S(J
i
)<S
min
(J
i
) to J
i
musiałoby
zajmować
czas procesora pomimo, że zadanie o wyższym
priorytecie nie
wykonało się, a to jest sprzeczne z założeniem o
planowaniu
wg priorytetów.

Przewidywalność
Z twierdzenia wynika, że możemy dobrze
kontrolować
przewidywalność wykonania gdy są ustalone
priorytety zadań,
zadania wykonują się w sposób wywłaszczalny na
jednym
procesorze i czasy złożenia są ustalone.
Wystarczy wtedy brać pod uwagę maksymalne czasy.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
Wyszukiwarka
Podobne podstrony:
Napęd Elektryczny wykład
wykład5
Psychologia wykład 1 Stres i radzenie sobie z nim zjazd B
Wykład 04
geriatria p pokarmowy wyklad materialy
ostre stany w alergologii wyklad 2003
WYKŁAD VII
Wykład 1, WPŁYW ŻYWIENIA NA ZDROWIE W RÓŻNYCH ETAPACH ŻYCIA CZŁOWIEKA
Zaburzenia nerwicowe wyklad
Szkol Wykład do Or
Strategie marketingowe prezentacje wykład
Wykład 6 2009 Użytkowanie obiektu
wyklad2
wykład 3
wyklad 5 PWSZ
więcej podobnych podstron