Teoria Sterowania
Teoria Sterowania
Teoria Sterowania
Teoria Sterowania
Teoria Sterowania
Teoria Sterowania
Zadaniem układu regulacji automatycznej (URA) jest
utrzymywanie równości między wielkością regulowaną y a
wielkością zadaną w. Zadanie to może być wykonane jedynie z
pewną dokładnością, określoną przez uchyb (błąd) regulacji:
e(t) = w(t) – y(t)
lub w postaci operatorowej
E(s) = W(s) -
Y(s)
Uchyb regulacji może być wywołany np. zakłóceniami, realizacją
techniczną układu, własnościami transmitancji układu otwartego
(strukturą układu).
Przed układem stawia się określone wymagania dotyczące
zarówno przebiegu procesu przejściowego, czyli przejściowego
sygnału uchybu e
p
(t) (właściwości dynamicznych), jak i jego
wartości w stanie ustalonym e
u
(właściwości statycznych).
Wymienione czynniki stanowią o jakości regulacji. Oceny jakości
regulacji dokonuje się na podstawie szeregu kryteriów
(wskaźników) jakości.
Teoria Sterowania
Teoria Sterowania
Kryteria jakości regulacji można podzielić na kilka grup:
• kryteria związane z parametrami charakterystyki skokowej
(układu zamkniętego),
• kryteria związane z parametrami charakterystyki
częstotliwościowej (zwykle układu otwartego),
• kryteria związane z rozkładem biegunów (i ewentualnie zer)
układu zamkniętego,
• kryteria całkowe (sterowania optymalnego).
Teoria Sterowania
Teoria Sterowania
Dokładność statyczna liniowego układu regulacji
Miarą dokładności statycznej jest uchyb ustalony, tzn. taki, który
utrzymuje się po zaniku procesów przejściowych wywołanych
wymuszeniem lub zakłóceniem:
0
lim ( ) lim ( )
u
t
s
e
e t
sE s
��
�
=
=
Uchyb ustalony jest w ogólności sumą składowych związanych z
wymuszeniem i zakłóceniem:
e
u
= e
uw
+ e
uz
Regulacja powinna spełniać warunek e
u
=0 lub |
e
u
| e
umax
.
Problemy:
• jak uchyb ustalony zależy od transmitancji układu otwartego
G
o
(s) i rodzaju sygnału wymuszenia (zakłócenia),
• jakie są ogólne zasady postępowania w celu zmniejszenia e
u
.
( )
( )
u
p
e t
e e t
= +
Uchyb regulacji jest sumą składowej ustalonej i składowej
przejściowej:
Teoria Sterowania
Teoria Sterowania
Układy statyczne i astatyczne
Wśród liniowych URA można wyróżnić zasadniczo dwa typy
układów:
• układy regulacji statycznej, w których występują uchyby
ustalone proporcjonalne do wartości stałego (skokowego)
wymuszenia;
• układy regulacji astatycznej, w których uchyby ustalone przy
stałym (skokowym) wymuszeniu są równe zeru (układy astatyczne
mogą wykazywać uchyby ustalone przy innych wymuszeniach, np.
rosnących liniowo, parabolicznie itp.).
URA jest układem astatycznym, jeżeli w transmitancji układu
otwartego znajdują się szeregowo włączone człony całkujące.
Teoria Sterowania
Teoria Sterowania
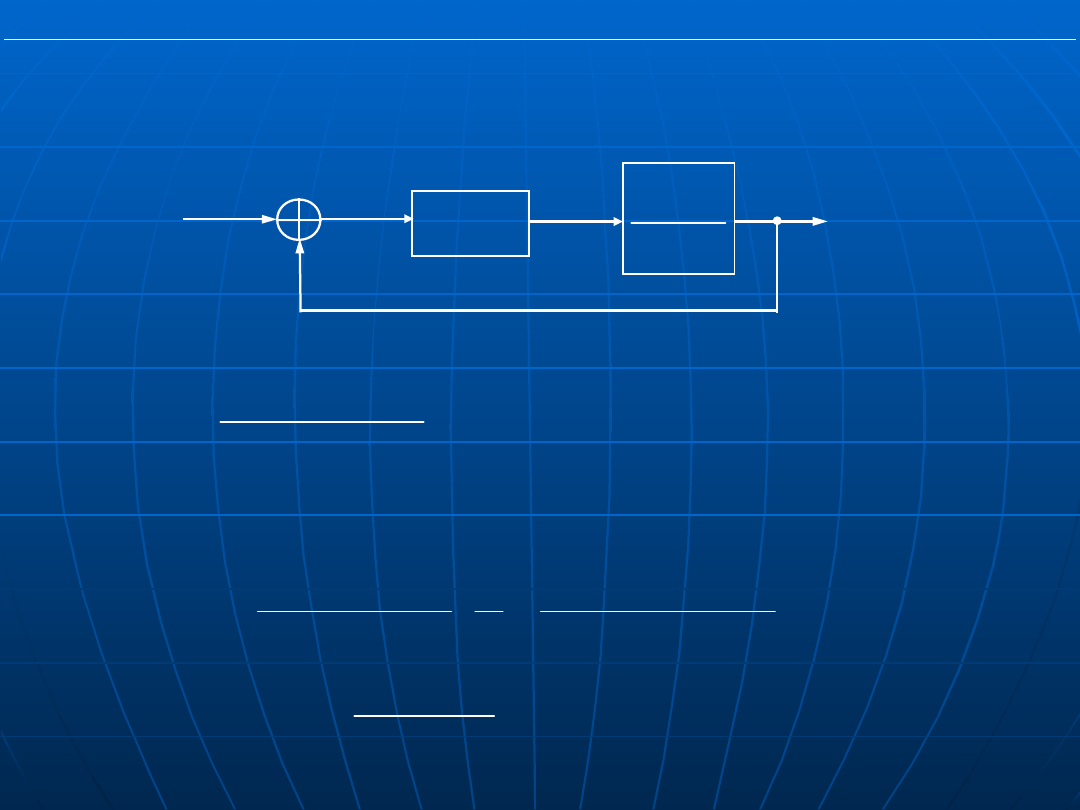
Przykład: Wyznaczyć uchyb ustalony odpowiedzi skokowej
(w(t)=A
1(t)) układu zamkniętego dla: 1) G
r
(s)=K
r
, 2) G
r
(s)=K
r
/s
G
r
(s)
1
p
K
Ts+
_
e(t
)
u(t
)
y(t
)
w(
t)
( )
1
r
p
z
r
p
K K
G s
Ts
K K
=
+ +
( )
( )
( ) [1
( )] ( )
z
E s W s Y s
G s W s
=
-
= -
(
1)
( )
1
1
(
1
)
r
p
r
p
r
p
K K
A
A Ts
E s
Ts
K K
s
s Ts
K K
�
�
+
= -
=
�
�
�
�
+ +
+ +
�
�
1)
lim ( )
1
u
s
r
p
A
e
sE s
K K
��
=
=
+
układ zamknięty jest
układem inercyjnym o
stałej czasowej T/(1+K
r
K
p
)
i współczynniku
wzmocnienia K
r
K
p
/(1+K
r
K
p
)
Teoria Sterowania
Teoria Sterowania
( )
(
1)
r
p
z
r
p
K K
G s
s Ts
K K
=
+ +
(
1)
( )
1
(
1)
(
1)
r
p
r
p
r
p
K K
A
A Ts
E s
s Ts
K K
s
s Ts
K K
�
�
+
= -
=
�
�
�
�
+ +
+ +
�
�
2)
lim ( ) 0
u
s
e
sE s
��
=
=
Układ zamknięty jest układem II rzędu (inercyjnym lub
oscylacyjnym) o współczynniku wzmocnienia równym 1.
Rozważmy w układzie regulacji ze sprzężeniem zwrotnym
transmitancję układu otwartego postaci:
1
1
1
0
1
1
( )
( )
( )
m
m
m
m
o
n
n
l
n
n
l
b s
b s
bs b
L s
G s
M s
a s
a s
a s
-
-
-
-
+
+ + +
=
=
+
+ +
K
K
1
1
0
0
l
a
a
a
-
= = = =
K
Teoria Sterowania
Teoria Sterowania
1
1
1
1
( )
(
)
( )
n
n
l
n
n
l
l
n l
n
l
l
n
n
l
M s
a s
a s
a s
s a s
a s
a
s N s
-
-
-
- -
-
=
+
+ +
=
=
+
+ +
=
K
K
Układ otwarty zawiera l połączonych szeregowo członów
całkujących, bo wielomian mianownika można zapisać jako:
gdzie N(s) jest wielomianem pełnym.
Taki układ nazywa się układem astatycznym l-tego rzędu.
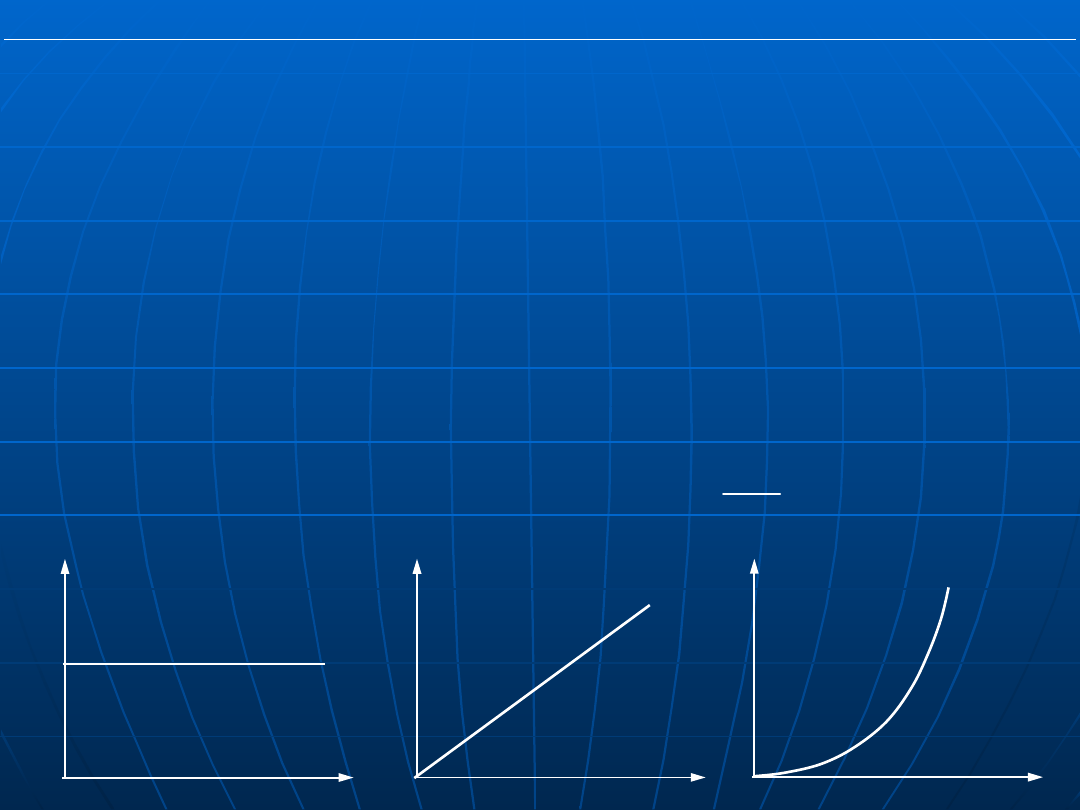
Rozważmy zależność uchybu ustalonego w układzie astatycznym
od wymuszenia (zakładamy brak zakłócenia) w postaci potęgowej
funkcji czasu:
( )
( )
k
k
w t
A t t
=
1
t
w(t),
k=0
t
w(t),
k=1
t
w(t),
k=2
1
!
( )
k
k
k
W s
A
s
+
=
Teoria Sterowania
Teoria Sterowania
Transmitancję uchybową wymuszeniową można zapisać jako:
1
( )
( )
1
( )
( )
( )
l
ew
l
o
s N s
G s
G s
s N s
L s
=
=
+
+
( )
( )
( ) ( )
( )
( )
( )
l
ew
l
s N s
E s
G s W s
W s
s N s
L s
=
=
+
Transformata uchybu i uchyb wymuszeniowy ustalony:
1
0
0
( )
lim ( ) lim
( )
( )
( )
l
uw
l
s
s
s N s
e
sE s
W s
s N s
L s
+
�
�
=
=
+
Teoria Sterowania
Teoria Sterowania
Układ regulacji statycznej to układ, w którym nie ma
szeregowo włączonych członów całkujących (l=0)
1
1
1
0
1
1
1
0
( )
( )
( )
m
m
m
m
o
n
n
n
n
b s
b s
bs b
L s
G s
N s
a s
a s
a s a
-
-
-
-
+
+ + +
=
=
+
+ +
+
K
K
Przy wymuszeniu skokowym w(t)=A
0
1(t), W(s)=A
0
/s, uchyb
ustalony:
0
0
0
0
0
lim ( ) lim
( )
1
1
( )
uw
s
s
A
A
s
e
sE s
L s s
K
N s
�
�
=
=
=
+
+
- współczynnik wzmocnienia układu
otwartego
0
0
0
b
K
a
=
Uchyb ustalony układu statycznego dla wymuszenia liniowo
narastajacego:
1
2
0
( )
lim
( )
( )
uw
s
A
sN s
e
N s
L s s
�
�=
+
0
1
1
uw
o
e
A
K
=
+
- współczynnik
statyzmu
Teoria Sterowania
Teoria Sterowania
Istnieje możliwość podwyższania dokładności statycznej układu
(zmniejszania
e
u
)
poprzez
zwiększanie
współczynnika
wzmocnienia układu otwartego K
o
. Nie można jednak dowolnie
zwiększać K
o
, ponieważ powoduje to zwykle pogorszenie
stabilności układu zamkniętego i zwiększa amplitudę sygnału
sterującego (a to wymaga większej mocy sterowania – większych i
droższych elementów wykonawczych).
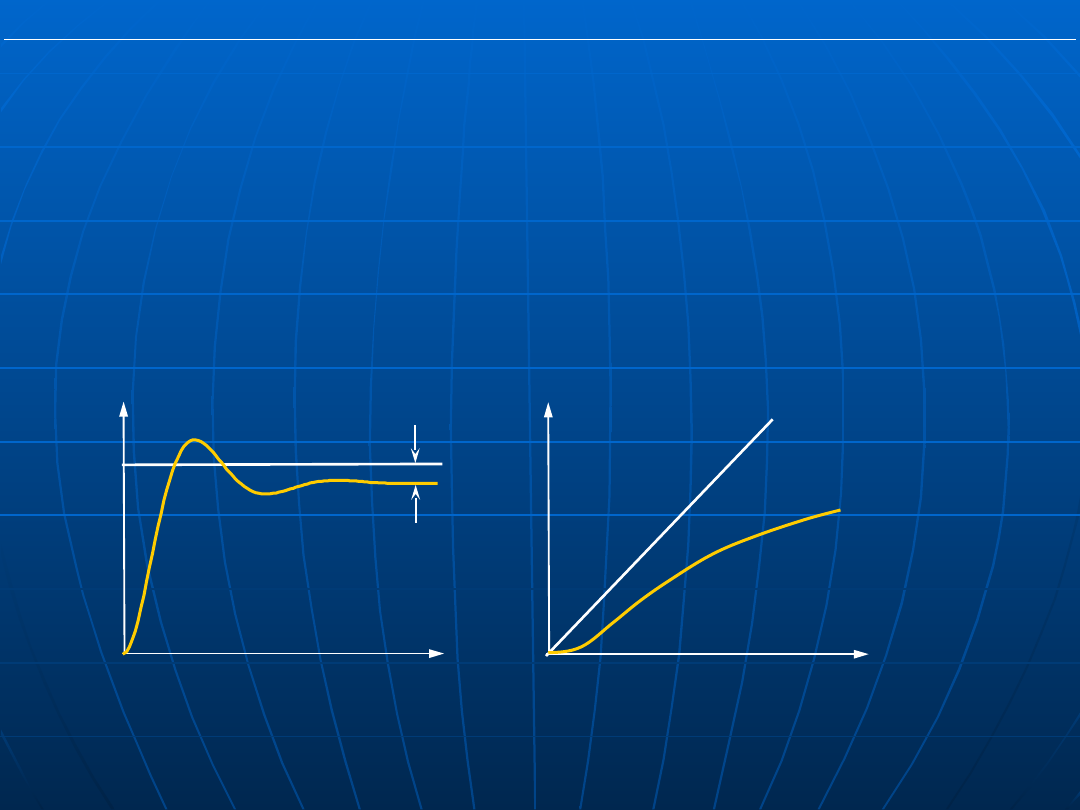
Układ statyczny nie jest w stanie nadążyć za wymuszeniem
zmieniającym się liniowo (a tym bardziej wymuszeniem wyższego
stopnia).
t
w(t
)
y(t)
e
u
t
w(t
)
y(t)
e(t)
Rys. Odpowiedź układu regulacji statycznej na wymuszenie skokowe i
liniowe
Teoria Sterowania
Teoria Sterowania
Układ regulacji astatycznej
Jeżeli na wejście układu astatycznego l-tego rzędu poda się
wymuszenie w formie funkcji potęgowej k-tego stopnia:
( )
( )
k
k
w t
A t t
=
1
1
!
( )
k
k
k
W s
A
s
+
=
1
0
!
( )
lim
( )
( )
l
k
uw
l
k
s
A k
s N s
e
s
s N s
L s s
+
�
=
�
+
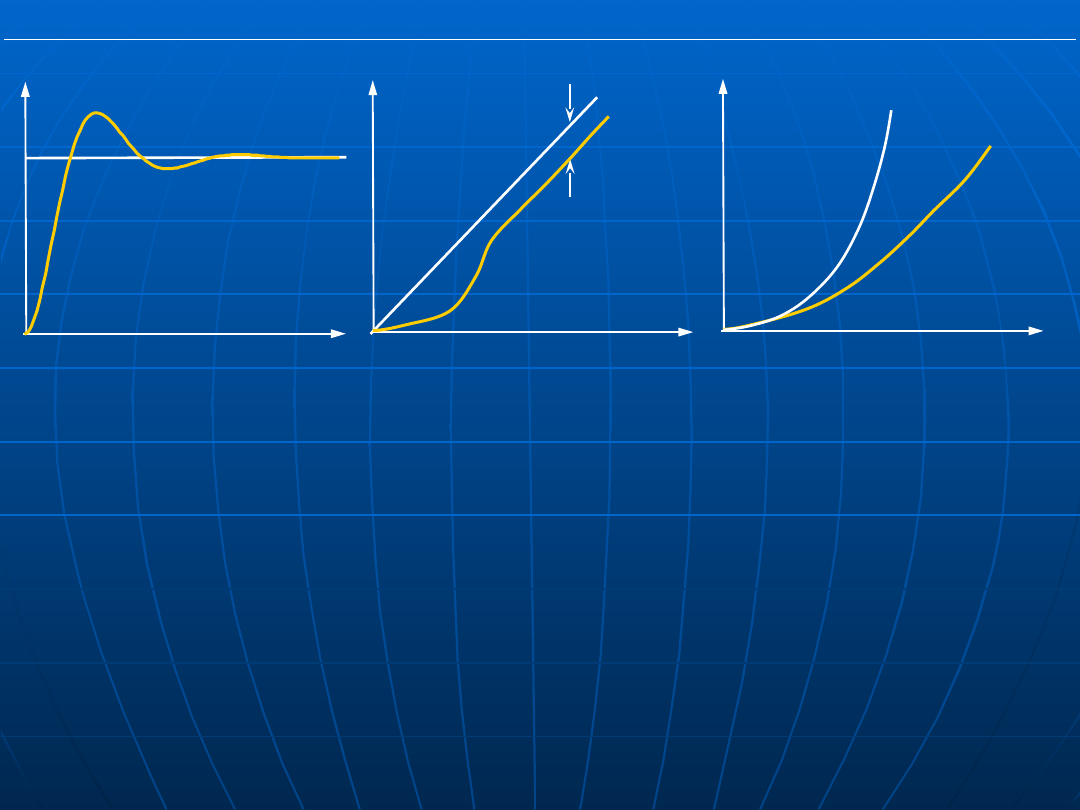
Możliwe jest wystąpienie jednego z trzech przypadków:
1. dla l > k e
uw
=0
2. dla l = k e
uw
=const
3. dla l < k e
uw
=
Wniosek: Układ regulacji astatycznej jest w stanie sprowadzić
do zera uchyb ustalony przy wymuszeniu potęgowym, jeżeli ma
wystarczająco wysoki rząd astatyzmu.
Podwyższanie rzędu astatyzmu (włączanie członów całkujących)
wpływa jednak niekorzystnie na stabilność układu zamkniętego
(układy astatyczne rzędu >2 są zwykle niestabilne bez
dodatkowej korekcji).
to uchyb ustalony:
Teoria Sterowania
Teoria Sterowania
t
y(t)
e
u
=0
t
y(t)
e
u
Rys. Typowe odpowiedzi układu regulacji astatycznej I rzędu na
wymuszenie skokowe, liniowe i paraboliczne.
t
y(t)
e(t)
Teoria Sterowania
Teoria Sterowania
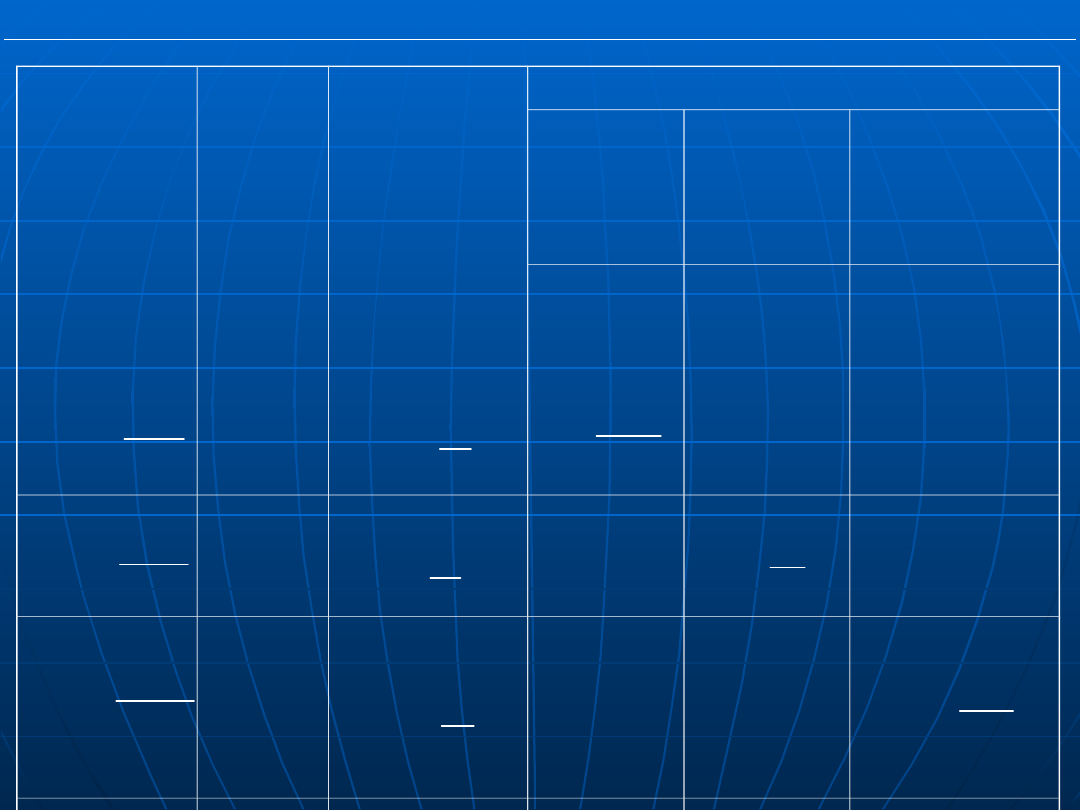
Transmitanc
ja układu
otwartego
Typ
układu
Współczynniki
wzmocnienia
układu
otwartego
Wymuszenie
skokowe
w(t)=A
0
1
(t)
liniowe
w(t)=A
1
t1
(t)
paraboliczne
w(t)=A
2
t
2
1(t)
uchyb
statyczny
e
u
uchyb
prędkościo
wy
e
uv
uchyb
przyspieszenio
wy
e
ua
statyczn
y
l=0
statyczny
astatycz
ny
I rzędu
l=1
prędkościowy
0
astatycz
ny
II rzędu
l=2
przyspieszeni
owy
0
0
( )
( )
( )
o
L s
G s
N s
=
( )
( )
( )
o
L s
G s
sN s
=
2
( )
( )
( )
o
L s
G s
s N s
=
0
0
o
b
k
a
=
0
1
v
b
k
a
=
0
2
a
b
k
a
=
0
0
1
u
A
e
k
=
+
1
uv
v
A
e
k
=
2
2
ua
a
A
e
k
=
Teoria Sterowania
Teoria Sterowania
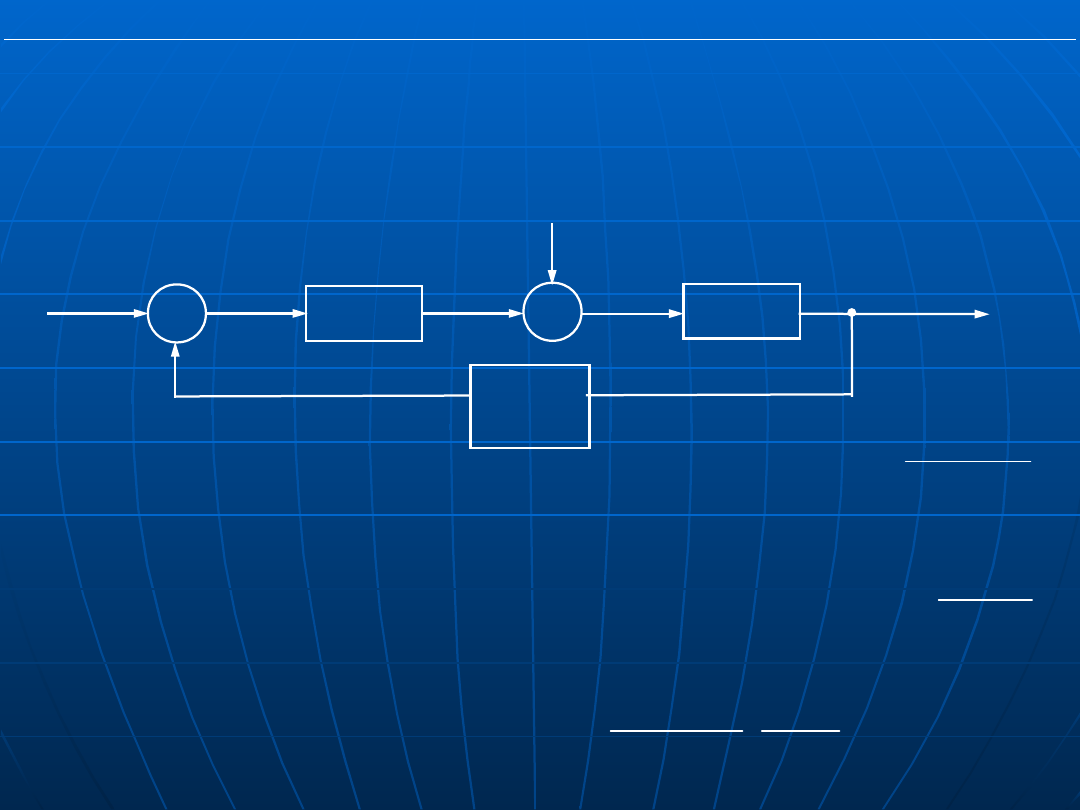
Zależność uchybu zakłóceniowego od transmitancji
regulatora
W przypadku, gdy na wejście obiektu działa zakłócenie (przy braku
wymuszenia), uchyb ustalony zależy od liczby członów całkujących
w transmitancji regulatora G
r
(s).
G
r
(s)
G
p
(s)
w(t)=0 e(t)
u(t)
∑
-
y(t)
+
∑
z(t
)
+
H(s)=
1
( )
( )
( )
r
r
r
r
L s
G s
s M s
=
)
(
1
)
(
t
t
B
t
z
m
m
1
!
)
(
m
m
s
m
B
s
Z
to uchyb ustalony od zakłócenia:
Jeżeli transmitancję regulatora przedstawimy w
postaci:
gdzie L
r
(s), M
r
(s) są wielomianami pełnymi.
a
zakłócenie:
lub w formie
operatorowej:
( )
( )
0
0
!
lim[
( ) ( )] lim
1
p
m
uz
ez
m
s
s
o
G s
B m
e
sG s Z s
G s
s
�
�
�
�
-
=
=
�
�
�
�
�
+
�
�

Teoria Sterowania
Teoria Sterowania
Zadanie: Wyznaczyć uchyb ustalony przy zakłóceniu skokowym
w układzie z obiektem o transmitancji G
p
(s), którego
współczynnik wzmocnienia K
p
=b
p0
/a
p0
dla:
1) G
r
(s)=K
r
(regulator P), 2) G
r
(s)=K
r
/s (regulator I).
Dla r=m>0 wartość uchybu ustalonego:
gdzie K
r
=b
r0
/a
r0
– współczynnik wzmocnienia regulatora.
!
m
uz
r
B m
e
K
=-
Możliwe są trzy przypadki:
1. dla r > m e
uz
= 0
2. dla r = m e
uz
=const
3. dla r < m e
uz
= -
( )
( )
0
0
0
0
lim[
( ) ( )] lim
1
1
p
p
uz
ez
s
s
r
p
r
p
G s
K B
B
e
sG s Z s
s
K G s
s
K K
�
�
�
�
-
-
=
=
�
=
�
�
�
�
+
+
�
�
1)
Jeżeli obiekt zawiera działanie całkujące, to K
p
i e
uz
=-B
0
/K
r
.
Teoria Sterowania
Teoria Sterowania
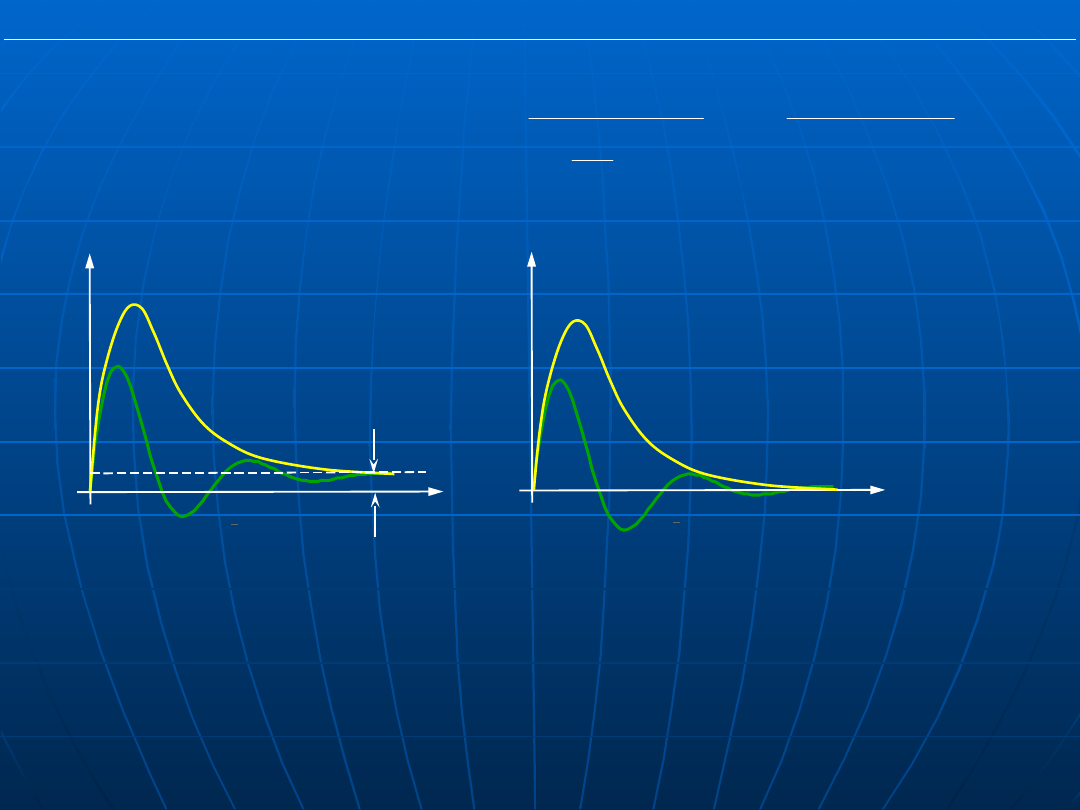
e
z
(t)
t
e
zu
=
0
e
z
(t)
t
e
zu
Rys. Typowe odpowiedzi (aperiodyczna i oscylacyjna) układu
regulacji na skokowe zakłócenie
( )
( )
( )
( )
0
0
0
0
0
lim[
( ) ( )] lim
lim
0
1
p
p
uz
ez
s
s
s
r
r
p
p
G s B
sG s B
e
sG s Z s
K
s K G s
G s
s
�
�
�
-
-
=
=
=
=
+
+
2)
Teoria Sterowania
Teoria Sterowania
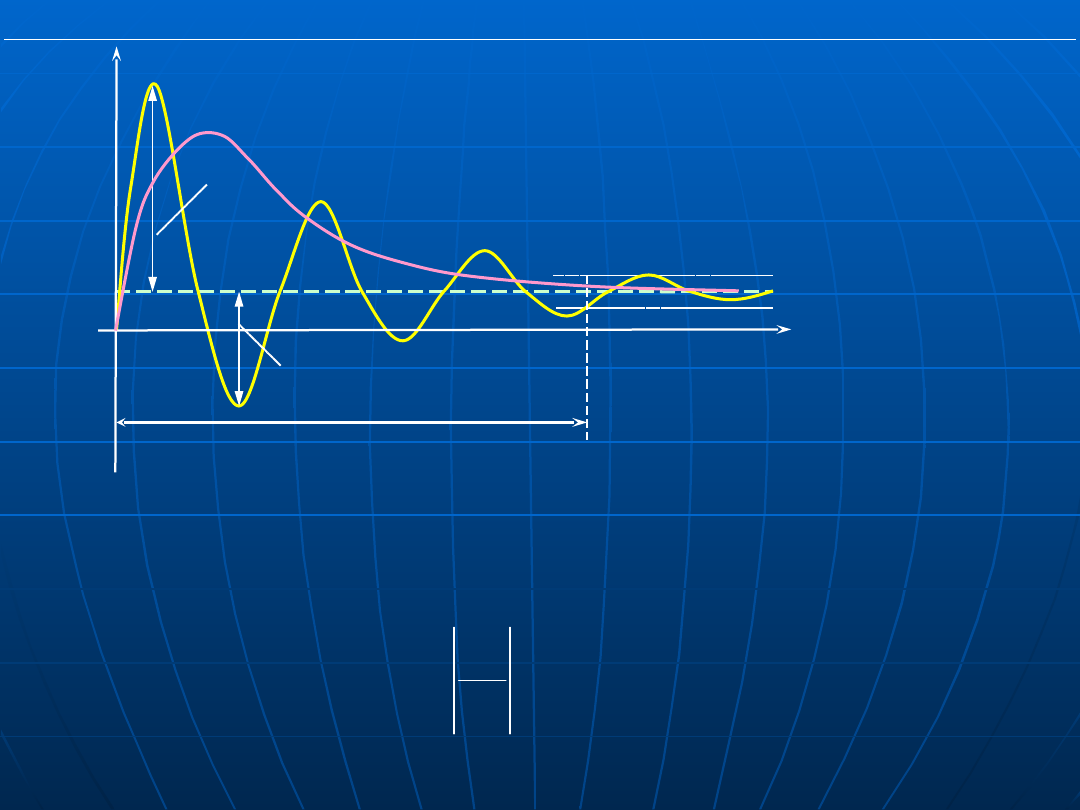
Dokładność dynamiczna liniowego układu
regulacji
Wymagania dynamiczne stawiane układom regulacji często
sprowadzają się do żądania określonego przebiegu przejściowego
sygnału uchybu regulacji e(t) przy skokowym wymuszeniu i/lub
zakłóceniu.
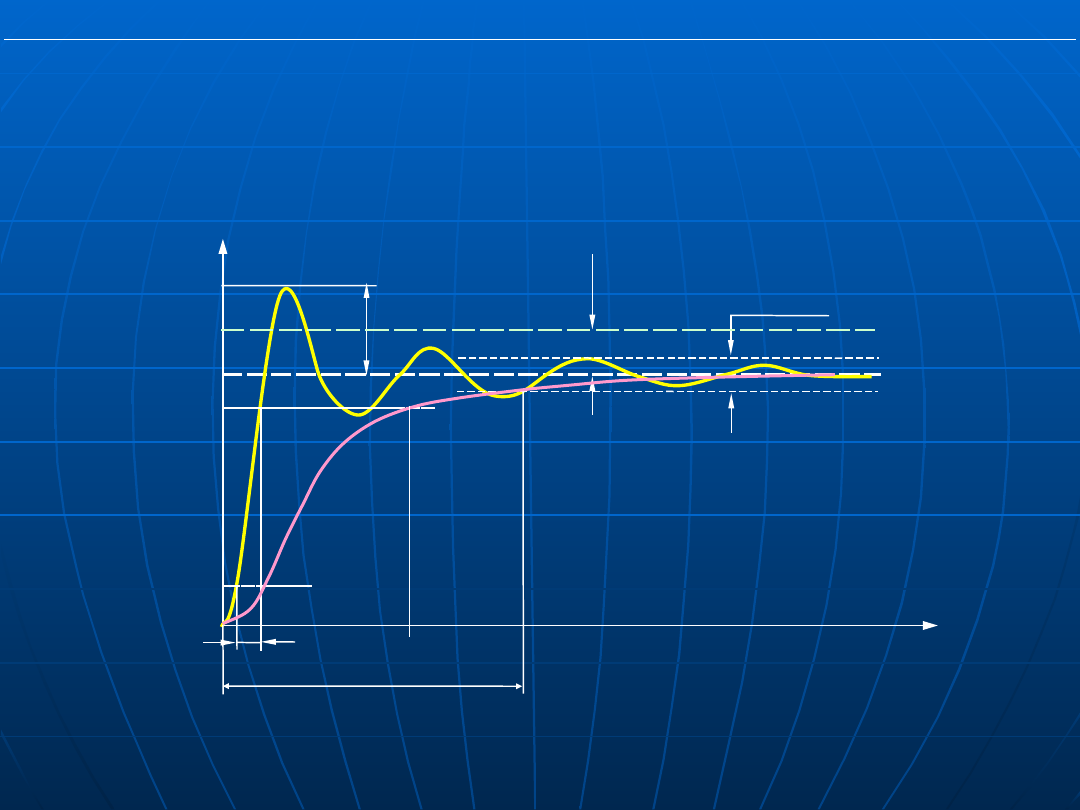
Rys. Przebieg oscylacyjnej i aperiodycznej odpowiedzi układu
regulacji przy skokowej zmianie wartości zadanej
(wymuszenia)
t
y(t
)
y
u
M
p
0,1y
u
0,9y
u
t
n
t
r
=±3% lub
±1%
e
u
w
y
ma
x
Teoria Sterowania
Teoria Sterowania
Wskaźnikami jakości związanymi z przebiegami czasowymi sygnału
sterowanego lub uchybu regulacji są:
• czas ustalania (regulacji) t
r
– jest to czas jaki upływa od chwili
doprowadzenia do układu wymuszenia (lub zakłócenia) do
momentu, gdy wahania sygnału uchybu e(t) wokół e
u
zmniejszą się
trwale poniżej założonej wartości e (zazwyczaj przyjmuje się e
równe 1 lub 3%). Czas regulacji określa czas trwania przebiegów
przejściowych w układzie i jest miarą zarówno szybkości jak i
stabilności układu.
czas narastania t
n
– jest to czas potrzebny do tego, aby
charakterystyka skokowa układu zmieniła się od 10% do 90%
wartości ustalonej (inna definicja określa czas narastania jako czas
pierwszego osiągnięcia przez sygnał sterowany wartości zadanej).
Czas narastania określa szybkość działania układu regulacji.
przeregulowanie M
p
- jest to stosunek maksymalnego
przeregulowania odpowiedzi skokowej do wartości stanu
ustalonego y
u
. Przeregulowanie odpowiedzi skokowej jest miarą
stabilności układu zamkniętego.
max
100%
u
p
u
y
y
M
y
-
=
�
Teoria Sterowania
Teoria Sterowania
Rys. Przebieg
oscylacyjnego i
aperiodycznego
przebiegu uchybu
regulacji przy
skokowym
wymuszeniu
t
e(t)= w(t)- y(t)
e
u
w
0
Podane wymagania są wzajemnie przeciwstawne, np.
zwiększenie szybkości regulacji pogarsza stabilność układu.
Przy projektowaniu regulacji podaje się zwykle ich
maksymalne dopuszczalne wartości lub przedziały wartości.
Teoria Sterowania
Teoria Sterowania
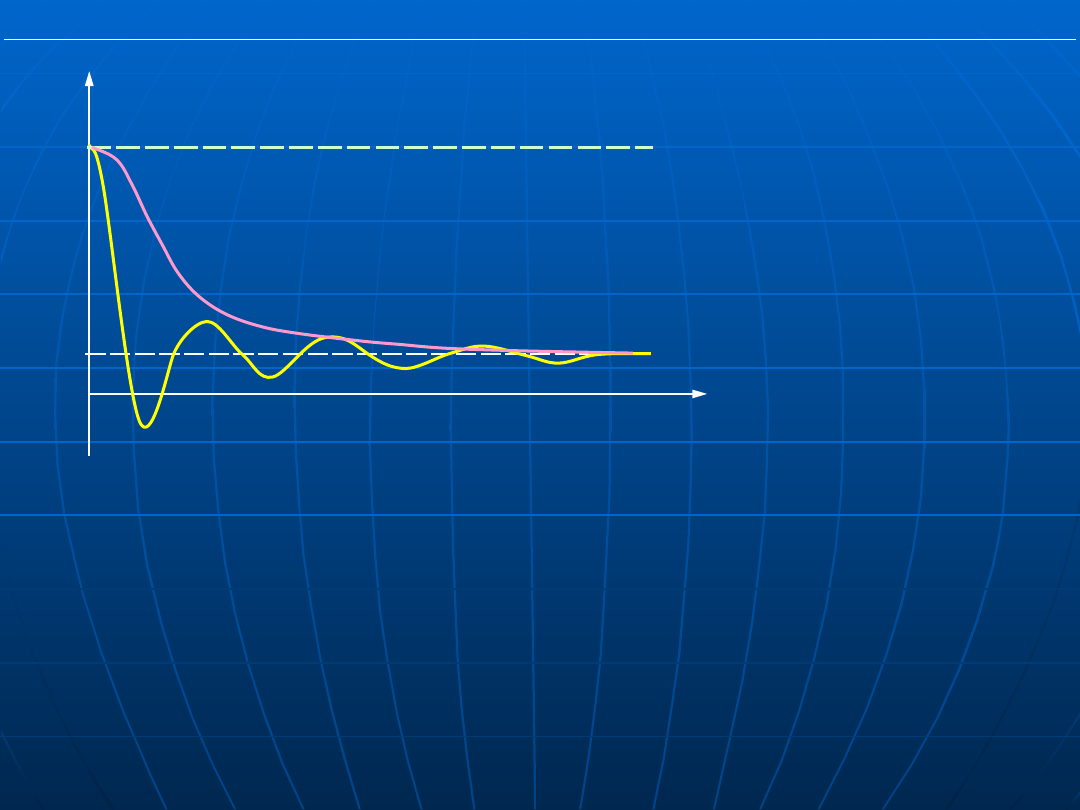
Rys. Przebieg uchybu
regulacji przy skokowej
zmianie zakłócenia
(wymuszenie w(t)=0)
e
p1
e
p2
0
e(t
)
t
t
r
e
Jeżeli rozpatrywany jest przebieg uchybu regulacji (np. w
odpowiedzi na skokowe zakłócenie) lub odpowiedź swobodna
układu), to jako wskaźnik analogiczny do M
p
stosuje się
współczynnik zanikania
tj. iloraz wartości bezwzględnych
amplitud dwóch sąsiednich przeregulowań:
2
1
100%
p
p
e
e
k =
�
Dla przebiegów aperiodycznych
M
p
==0.

Teoria Sterowania
Teoria Sterowania
Jeżeli układ zamknięty (nawet jeśli jest to układ wyższego rzędu)
ma 2 bieguny dominujące, to można go aproksymować
transmitancją członu II rzędu:
1.4dla
0.3
4.6 dla
1%
ln
, gdzie
,
, gdzie
1.8dla
0.5,
3.5dla
3%
2.1dla
0.7
r
n
n
e
t
t
e
z
b
a
b
a
z
s
s
w
z
=
�
D =
�
-
D
�
=
=
=
�
=
=
�
�
D =
�
�
=
�
exp
100%
p
d
M
ps
w
�
�
-
=
�
�
�
�
�
3
.
0
dla
%
35
5
.
0
dla
%
15
7
.
0
dla
%
5
p
M
2
2
2
2
)
(
n
n
n
s
s
s
G
Analizując wzór na charakterystykę skokową tego członu można
podać zależności między parametrami transmitancji a wskaźnikami
jakości:
Często spotykane wartości
przybliżone:
gdzie:
=
n
,
2
1
d
n
w
w
z
=
-
Peak time:
t
max
=/
d
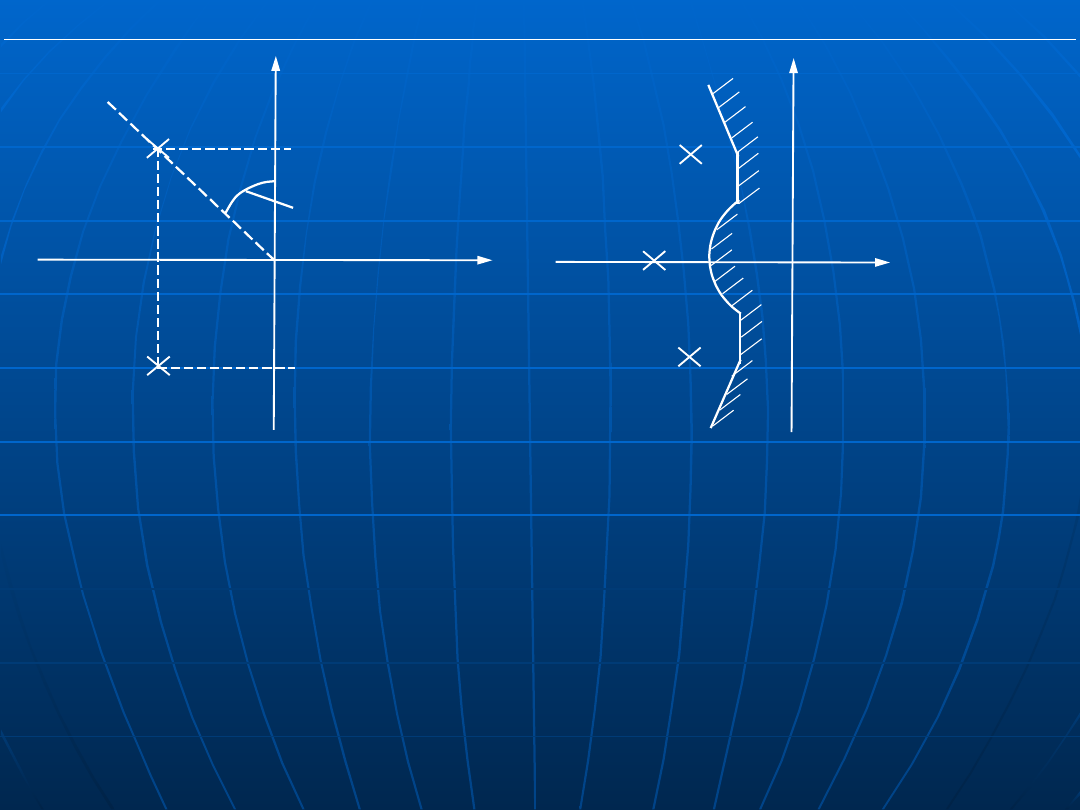
Teoria Sterowania
Teoria Sterowania
Re s
Im s
j
d
-j
d
n
arcsinz
Re s
Im s
obszar
zakaza
ny
Rys. Obszar zakazany dla biegunów układu zamkniętego przy
minimalnych dopuszczalnych wartościach wskaźników
(
,
n
,
)
i związanych z nimi
(
t
r
, t
n
, M
p
).
Teoria Sterowania
Teoria Sterowania
Całkowe kryteria jakości regulacji
Optymalizacja układu regulacji ma za zadanie uzyskanie możliwie
krótkiego czasu regulacji i jak najmniejszego przeregulowania.
Wymagania te są sprzeczne ze sobą i dlatego konieczny jest
kompromis. Kompromis taki zapewniają kryteria całkowe, mające
charakter kryteriów globalnych, oceniających cały przebieg
sygnału błędu e
p
(t). Polegają one na żądaniu minimalizacji
jednego z całkowych wskaźników jakości:
kryterium ISE (Integral Squared Error):
dt
t
e
I
p
ISE
0
2
)
(
Zastosowanie kryterium ISE do układu II rzędu daje tłumienie
=0.5 i przeregulowanie M
p
=16%.
kryterium IAE (Integral of Absolute Error):
0
| ( )|
IAE
p
I
e t dt
�
=
�
Zastosowanie kryterium IAE do układu II rzędu daje tłumienie
=1 (M
p
=0%).
Teoria Sterowania
Teoria Sterowania
kryterium ITAE (Integral of Time by Absolute Error):
0
| ( )|
ITAE
p
I
t e t dt
�
=
�
Zastosowanie kryterium ITAE do układu II rzędu daje tłumienie
=1/2=0.707 i przeregulowanie M
p
=4%. Mnożenie przez czas t
odpowiada nadawaniu wagi wartości bezwzględnej błędu.
Kryterium ITAE znajduje szerokie zastosowanie w technice,
ponieważ prowadzi do kompromisu: niewielkie przeregulowanie
przy stosunkowo krótkim czasie regulacji.
Jeżeli układ zamknięty jest opisany transmitancją n-tego rzędu
postaci:
to optymalne w sensie ITAE wielomiany mianownika są
następujące:
)
(
)
(
)
(
)
(
0
s
M
b
s
X
s
Y
s
G
n
z
1
0
( )
M s
s w
= +
2
2
2
0
0
( )
1.41
M s
s
s
w
w
= +
+
3
2
2
3
3
0
0
0
( )
1.75
2.1
M s
s
s
s
w
w
w
= +
+
+
4
3
2 2
3
4
4
0
0
0
0
( )
2.1
3.4
2.7
M s
s
s
s
s
w
w
w
w
= +
+
+
+
gdzie
0
oznacza częstotliwość drgań własnych układu i określa
jego zadane pasmo przenoszenia.
Teoria Sterowania
Teoria Sterowania
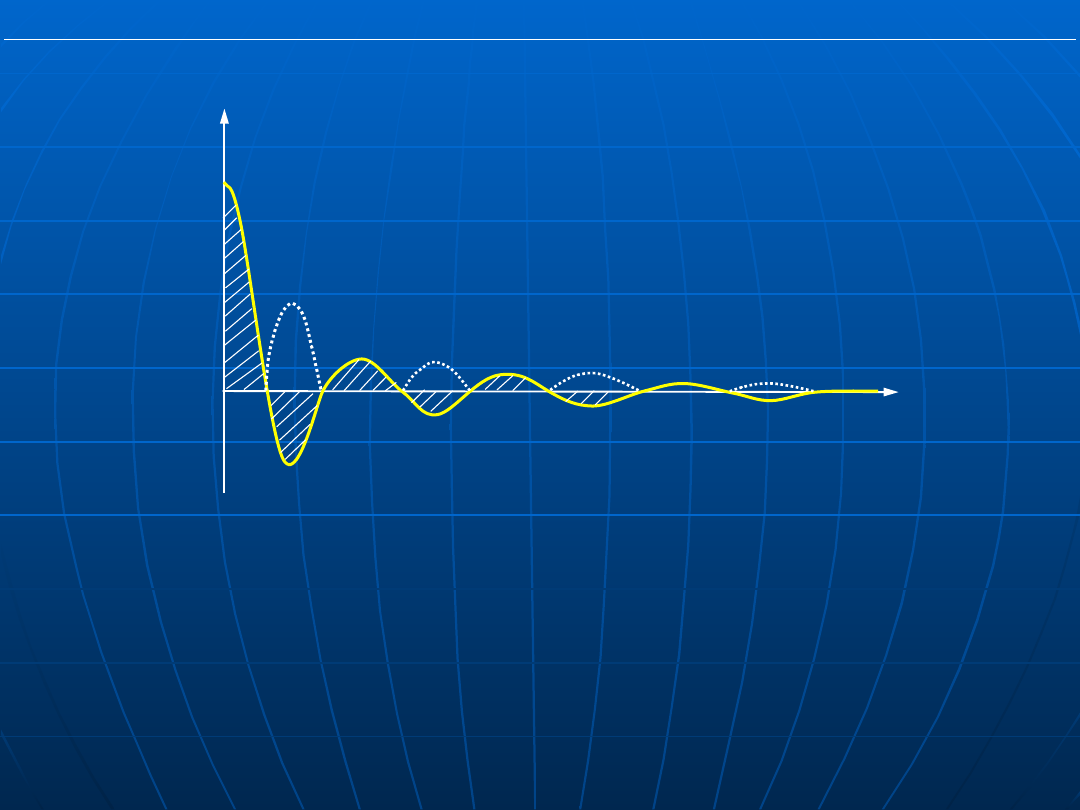
t
e
p
(t), |
e
p
(t)|
e
p
(0)
0
Minimalizacja wskaźników całkowych (tzw. funkcji kosztu) stanowi
podstawę sterowania optymalnego.
Często stosowany jest wskaźnik zawierający kombinację energii
uchybu i wielkości sterującej (
– waga):
2
2
0
[ ( )
( )]
J
e t
u t dt
r
�
=
+
�
Teoria Sterowania
Teoria Sterowania
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
Wyszukiwarka
Podobne podstrony:
Genetyka regulacja funkcji genow
REGULACJA UKLADU KRAZENIA 2
33 Przebieg i regulacja procesu translacji
8 ocena jakości układów regulacji
WYKŁAD 11 SPS 2 regulatory 0
WYKŁAD 7 Szeregowy regulacja hamowanie
Wzajemna regulacja gruczołów wydzielania wewnętrznego, pętle sprzężeń między gruczołami
REGUŁA DOŁĄCZANIA ALTERNATYWY
Regulacja GPZ,GP, UPR
bartek gasior g3 regulacja krazenia
Nieprawidłowości w regulacji neurohormonalnej ustroju
więcej podobnych podstron