
KOMPUTEROWE
WSPOMAGANIE
ZARZĄDZANIA PROJEKTAMI
Prowadzący: prof. dr hab. inż. Zenon
Ignaszak
Wykonali:
Sebastian Purek
Bartosz Parzuchowski

ON THE DYNAMIC CRITERIA FOR THE
CONFIGURATION DESIGN OF THE MACHINE
COMPONENTS -
APPLICATION TO HIGHSPEED AND
PRECISIONMACHINĘ TOOL DESIGN
KRYTERIUM DYNAMIKI W KONFIGURACJI
KONSTRUOWANIA CZĘŚCI –
ZASTOSOWANIE DO PROJEKTOWANIE
WYSOKOOBROTOWYCH I PRECYZYJNYCH
OBRABIAREK
Antoine Dequidt
LAMIH - Universite de Valenciennes, Le Mont Houy, F-59313
Valenciennes cedex 9
antoine.dequidt@univ-valenciennes.fr
Etenne Valdes
IUT de Figeac, Universite Toulouse II - le Mirail, Avenue de Nayrac, F-
46100 Figeac
Antoine Dequidt
LAMIH – Uniwersytet de Valenciennes, Le Mont Houy, F-59313
Valenciennes cedex 9
antoine.dequdt@uvin-valenciennes.fr
Etienne Valdès
IUT de Figeac, Uniwersytet Toulouse II – le Mirial, Avenue de Nayrac, F-
46100 Figeac

Bibliografia:
•H, SHINNO AND Y, ITO,"Computer Aided Concept Design for Structural Configuration of
Machine Tools: Variant Design Using Directed Graph", ASME Journal of Mechanism
Tranmissions and Automation in Design, Vol, 109, N° 7, 1987, pp, 372-376,
•O, GARRO, L, LOSSENT, P, CHARPENTIER, P, MARTIN, "Aide ala conception
d'architecture de machine-outil", Revue d'automatique et de productique appliquees,
Vol , 6, N° 2, 1993, pp , 145-158 ,
•M , WOONG, J.-H , CHA, J.-H , PARK, M , KANG, "Development ofan inteligent design
system for em$odiment design of machine tools", Annals ofthe CIRP, Vol , 48, N°1,
1999, pp , 329-332 ,
•I , NEMETH, H VAN BRUSSEL , "Conceptual design of 3 axis machine tools",Proc , ofthe
32nd CIRP International Seminar on Manufacturing Systems - New Tools and Workflows
for Product Development, May 14-15, 1998, pp , 269-281,
•I , NEMETH, P , FISETTE, H , VAN BRUSSEL , "Conceptual design of 3-axis machine
tools",Proc , of th 32
nd
CIRP International Seminar on Manufacturing Systems, May 1999,
pp , 239-248 ,
•I , NEMETH, A , LIPÓTH, AND H , VAN BRUSSEL , "Preliminary design of 3-axis machine
tools: synthesis, analysis and optimisation", Proceedings of the 6th International
Conference on Computer-Aided Industrial Design & Conceptual Design, Delft, The
Netherlands, May 29 - June 1, 2005, pp,454-459 ,
•A , DEQUIDT, E , VALDES ,"Modele de liaison elastigue eguivalente pour l'analyse etla
conception/commande de mecanisme", Actes du 17
eme
Congres Franęais de Mecanique,
Troyes, 29 aout-2 septembre, 2005, CDROM,
•A , MERLIN , "Estimation et analyse d'erreurs dues au $asculement des machines
outils", Memoire de DEA, Universite de Valenciennes et du Hainaut-Cambresis, 2003 ,

•E , VALDES, A , DEQUIDT ,"Analyse des coulants de machines UGV et optimisation de leur
comportement dynamigue'', Actes des 3
e
Assises Machines et Usinage a Grande Vitesse, Clermont-
Ferrand, 10-11 mars 2004, pp , 121-129 ,
•F , DEBROUCKE , "Contri$ution ala mattrise du $asculement dans les machines cartesiennes ;
application aux machines dediees a l 'usinage a grande vitesse"', These de Doctorat, Universite de
Valenciennes et du Hainaut-Cambresis, 2003 ,
•G , BIANCHI, F , PAOLUCCI, P , VAN DEN BRAEMBUSSCHE, H , VAN BRUSSEL , "Towards Virtual
Engineering in Machine Tool Design", Annals of the CIRP, Vol , 45, N° 1, 1996, pp , 381 384 ,
•M , ZATARAIN , "Modular Synthesis of Machine Tools", Annals of CIRP Manufacturing Technology,
Vol , 47, n°1, 1998 pp , 333-336 ,
•E , VALDES, A , DEQUIDT, N , MAIZA, J -P , LEROY, J -M , CASTELAIN , "A Methodologyfor the Design
of Servo-Systems Dedicated to Machine-Tools ", Integrated Design and Manufacturing in Mechanical
Engineering"Kluwer Academic publishers, 1997, pp 515-524 ,
•B , -C , WU, G , -S , YOUNG, T , -Y , HUANG, "Application of a two-level optimization process
toconceptual structural design of a machine tool", International Journal of Machine Tools
&Manufacture, Vol , 40, 2000, pp , 783-794 ,
•S , WEIKERT , "Beitrag zur Analyse des dynamischen Verhallens von Werkzeugmaschinen", Doktor
Diss.der ETH (Swiss Federal Institute of Technology Zurich ), 2000 ,
•A , DEQUIDT, E , VALDES, F , DEBROUCKE, JM , CASTELAIN , "Conception mecanigue integrant la
commande d'un axe de machine grande vitesse possedant une architecture gantry", Proc , of 3
rd
International Conference on Integrated Design and Manufacturing in Mechanical Engineering,
Montreal, Canada, May 16-19, 2000, CDROM ,
•E , VALDES, A , DEQUIDT, F , DEBROUCKE, JM , CASTELAIN , "Design of$all screw drive system for
machine high speed axles",Proc , of 2
nd
International Seminar on Improving Machine Tool
Performance, Nantes, La Baule, France, 2000, CDROM ,
•A , DEQUIDT, JM, CASTELAIN, E , VALDES , "Mechanical pre-design of high performance motion
servomechanism", Mechanism and Machine Theory, Vol , 35, n°8, 2000, pp , 1047-1063 ,

Abstract:
This paper deals with methods and models for configuration design of high speed machinę
tools. To fulfil the performance requirements such as accuracy and acceleration related to
high speed, designers focus on the dynamie behaviour of machines, which depends on the
features of each component as well as their configuration. Nevertheless a conceptual solution
of component configuration had to be selected despite a lack of embodiment whereas the
design of each structural component can be founded on stress and strain computation and
modal analysis. Consequently, it is difficult to link the configuration design to dynamic criteria
at an earfy stage of design. The body tilting occurs in high speed cartesian machine is a key
issue that highlights the impact of component configuration on dynamic behaviour. This
phenomenon is caused by actuator forces and the resulting undesirable small rotation
combined with the Abbe 's offsets generate errors at the tool center point. Based on this
analysis, supports for insightful design of component configuration are provided. First
symbolic modelling of component configuration is presented with the equivalent elastic joint
model Afterwards methods are derived to generate design guidelines and to analyse the
configuration from a dynamic point of view.
Streszczenie:
Artykuł ten zajmuje się metodami i modelami wysokoobrotowych obrabiarek. Aby spełnić wymagania
wydajności takie jak dokładność i przyspieszenie odnoszące się do wysokich obrotów, projektanci
koncentrują się na dynamicznym zachowaniu maszyn, które zależy od cech każdej części składowej
tak samo jak od ich konfiguracji. Jednakże koncepcyjne rozwiązanie konfiguracji części składowej
musiało być wybrane pomimo braku wcielenia podczas gdy każda konstrukcyjna część składowa może
być znaleziona w oparciu o obliczenia naprężenia i odkształcenia oraz analizy modalnej. W rezultacie
trudno jest połączyć projekt konfiguracji z kryteriami dynamiki w początkowym etapie projektu.
Odchylenie korpusu pojawiające się przy wysokich obrotach trzyosiowej obrabiarki jest kluczowym
problemem podkreślającym wpływ części składowych konfiguracji na dynamiczne zachowania.
Zjawisko to jest spowodowane siłą napędu oraz wynikającą niewielką niepożądaną rotacją połączoną z
korekcją błędów powstających w centralnym punkcie urządzenia. Na podstawie tej analizy,
dostarczona jest wnikliwa obsługa projektowania części składowych konfiguracji. Pierwsze symboliczne
modelowanie części składowych zostało zaprezentowane na odpowiedniku elastycznego połączenia
modelu. Następne metody zostały zaczerpnięte aby wygenerować instrukcje projektowania oraz
poddać analizie konfigurację z punktu widzenia dynamiki.

Key words: mechatronics, dynamics, conceptual design, architecture, multi-body
system, elastic joint, guideway, high speed machining, tool tip error.
1. Introduction
Designers attempt to develop controlled motion sub-systems with fast and
accurate functions in consumer products like compact-disc players or in
manufacturing equipments like machine tools The design requirements involve
high dynamic performances with respect to motion and vibration. These
mechanisms and machines are made up of several kinds of components that are
assembled to achieve the required performance (speed and accuracy
requirements, payload, etc). Thus designers had to define the configuration of
components, i.e. the manner in which they are combined, and the embodiment
of some of them such as the structural components (the bodies).
Słowa kluczowe: mechatronika, dynamika, koncepcyjne projektowanie,
architektura, system wielokorpusowy, elastyczne połączenia, prowadnica,
obrabiarka wysokoobrotowa, granica błędu maszyny.
1. Wstęp
Projektanci próbują rozwinąć podsystem kontroli ruchu z szybkimi i dokładnymi
funkcjami w produktach konsumenckich takich jak kompaktowe odtwarzacze
płyt oraz w wyposażeniu produkcji przemysłowej w obrabiarkach. Wymogi
projektów obejmują wysoką wydajność dynamiczną w zakresie ruchu i drgań. Te
mechanizmy i maszyny składają się z kilku rodzajów części składowych, które są
zmontowane w celu osiągnięcia wymaganych osiągów ( wymogi prędkości i
precyzji, ładowności itd.) Projektanci musieli zdefiniować zestawienie części
składowych, np. sposób w jaki zostały one połączone oraz przykład wykonania
niektórych z nich, takich jak elementów konstrukcyjnych (korpusów).

Briefly speaking, both major classical points of view occur in mechanical design,
namely mechanisms and mechanics of structure. From the mechanism point of
view, the system is an assembly of links and joints ; it focuses on kinematic
analysis and design of configuration, but weakly on dynamic behaviour. Structural
point of view focused on stress and strain in bodies and modal properties is
dedicated to frame analysis under load and embodiment design of bodies.
Conseąuently, it is a point of view far from the concern about configuration
design.
Krótko mówiąc, oba główne klasyczne punkty widzenia pojawiają się w
projektowaniu mechanicznym, czyli mechanizmach i mechanice działania
konstrukcji. Z mechanicznego punktu widzenia, system jest nagromadzeniem
połączeń i spoin; skupia się na analizie kinematycznej i projektowaniu konfiguracji
oraz w niewielkim stopniu na zachowaniu dynamiki. Konstrukcyjny punkt widzenia
skupiający się na naprężeniach i odkształceniach w korpusie oraz modalnych
właściwościach jest poświęcony sformułowaniu analizy przy obciążeniu i wcieleniu
projektu korpusów. W konsekwencji jest to punkt widzenia daleki od sprawy
projektowania konfiguracji.

In particular, the design of machine tools for high speed and precision motion,
e.g. machines for high speed machining, laser cutting, coordinate measuring or
fast assembly, is a challenging task. Indeed, the accelerations of bodies related to
speed variations and trajectory curvatures cause dynamic loads, which can lead
to significant linear and angular errors of the tool or workpiece traaectory. Besides
the dynamic behaviour depends not only on the features of each component but
also on their configuration. The component configuration of a machine tool is the
type and the spatial arrangement of all its various components, namely the
structural components as the frame and moving bodies and the functional
components such as guideway components, feed drive components, spindle and
so on. Therefore to achieve the performance reąuirements, the configuration
design involves some dynamic critera ; however, the configuration has to be
defined at the early stage of design and this despite the lack of information on
material distribution.
W szczególności projektowanie precyzyjnych obrabiarek wysokoobrotowych, np.
maszyn do wysokoobrotowego obrabiania , wycinania laserowego, koordynacji
pomiarów i szybkiego montażu jest wyzwaniem. Rzeczywiście, przyspieszenia
korpusów związane ze zmianami prędkości i krzywiznami trajektorii powodują
obciążenie dynamiczne, które może spowodować znaczące linearne i kątowe
błędy narzędzia lub obrabianej trajektorii. Ponadto dynamiczne zachowanie zależy
nie tylko od cech każdej części składowej, ale również od ich konfiguracji.
Konfiguracja składowa obrabiarki jest typem przestrzennym uporządkowaniem jej
wszystkich różnych części składowych, czyli elementów konstrukcyjnych jako
rama oraz ruchomych elementów i składników funkcyjnych, takich jak części
składowe prowadnicy, przewody paliwowe napędzające części składowe,
wrzeciona i tym podobne. Dlatego aby osiągnąć wymagania dotyczące osiągów
projektowanie konfiguracji zawiera pewne kryteria dynamiki; jednakże
konfiguracja musi być określona we wczesnym etapie projektowania pomimo
braku informacji o dystrybucji materiałów.

Several methods have been developed for the configuration design of cartesian
machine tools, see for instance [1,2,3,4,5,6] where the discussions focus on the
family of three-axis
1
machines except [2]. However, the design of component
configuration taking into account high speed motion reąuirements has not been
examined in depth. This paper emphasises the dynamic point of view at the
preliminary stage of design of high speed 3-axis machine tools An original
approach based on symbolic model and eąuivalent elastic joints is proposed in
order to give designers insights into the component configuration, the dynamic
behaviour and their relationships. Thus, rather than developing of a black box of
configuration optimisation, the purpose is to provide insightful dynamic analysis
and design criteria as a result of which the designers can explore design
alternatives and make learned decision. In section 2, the bibliographical
background of the study is introduced.
Rozwinięto kilka metod do projektowania konfiguracji obrabiarek trójosiowych,
zobacz przykłady [1,2,3,4,5,6], których omówienia skupiają się głównie na
‘rodzinie’ trójosiowych maszyn z wyjątkiem [2]. Jednakże projektowanie
składowych konfiguracji biorące pod uwagę wymogi dotyczące wysokoobrotowego
ruchu nie zostało dogłębnie sprawdzone. Ten artykuł podkreśla punkt widzenia
dynamiki na wstępny etap projektowania wysokoobrotowych trzyosiowych
obrabiarek. Zaproponowano oryginalne podejście oparte na symbolicznych
modelach i elastycznych odpowiednikach połączeń w celu umożliwienia
projektantom wglądu do składowych konfiguracji, zachowania dynamiki i ich
wzajemnych oddziaływań. Tak więc, bardziej niż udoskonalanie czarnej skrzynki
optymalizacji konfiguracji, celem jest zapewnienie wglądowej analizy dynamiki i
kryteriów projektowania, wynikiem których projektanci mogą zbadać alternatywy
dla projektowania oraz podjąć właściwą decyzję. W rozdziale 2, wprowadzono
bibliograficzne tło badań.

Moreover, to highlight the foundations of the approach, a preliminary analysis is
given into the connection between component configuration and tool tip error
related to dynamic load. Models are derived in section 3 based on eąuivalent
elastic joints Section 4 presents how the symbolic model is used to generate
design guidelines and for configuration analysis and re-design. The paper is a
synthesis of several works on different particular points (modelling, machine
analysis and design) [7,8,9] and a PhD thesis [10] and it offers a general view of
the design approach.
Ponadto aby podkreślić podstawy do takiego podejścia, przedstawiono wstępną
analizę w połączeniu pomiędzy składowymi konfiguracji i dopuszczalną granicą
błędu narzędzia w odniesieniu do obciążenia dynamicznego. W rozdziale 3.
wprowadzono modele opierające się na elastycznych odpowiednikach spoin.
Rozdziale 4. prezentuje jak symboliczny model użyty jest aby wygenerować
wytyczne do projektowania, analizy konfiguracji oraz do przeprojektowania.
Artykuł ten jest połączeniem kilku prac dotyczących poszczególnych punktów
(modelowanie, analiza mechaniczna, projektowanie) [7,8,9] oraz pracy doktorskiej
i dostarcza ogólne spojrzenie na projektowanie/podejście do projektowania.

2 Background and propositions
2.1 Machine tool design and dynamic behaviour
To fulfil the performance reąuirements such as payload, external forces, speed,
acceleration and accuracy in the whole workspace, designers attempt to involve
various points of view, namely geometric and clearance, assembly of
components, manufacturing of structural components, static stiffness, dynamic
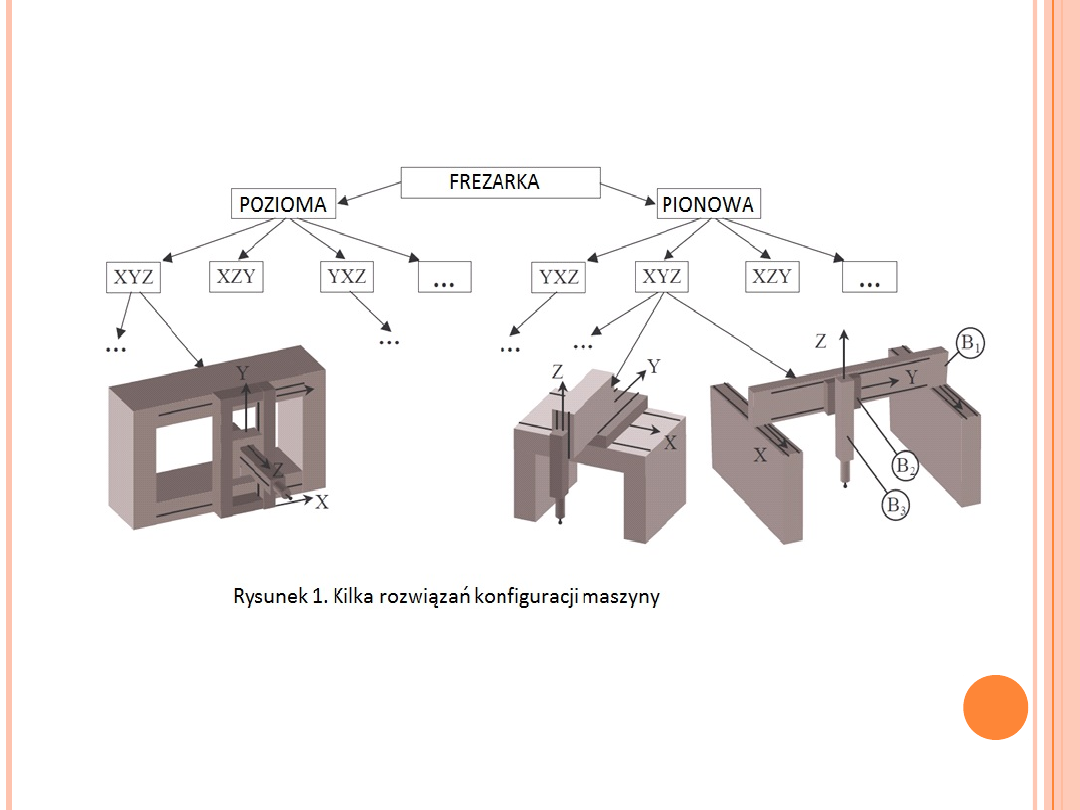
and control, and so on, in a great space of design solutions. From the simple tree-
orthogonal prismatic joint kinematics of a cartesian machine, lots of possible
configurations can be derived (cf. figure 1 for instance). Several works, e.g [1],
proposed some methods to systematically describe these configurations and
generate the various topological combinations.
2. Przygotowanie i propozycje
2.1 Projektowanie obrabiarki i zachowanie dynamiki
Aby wypełnić wymogi osiągów dotyczące m.in. obciążeń, sił zewnętrznych,
prędkości, przyspieszenia i precyzji w całym obszarze roboczym, projektanci
próbują objąć różne punkty widzenia, czyli geometryczny oraz odległość, montaż
części składowych, produkcja elementów konstrukcyjnych, statyczna sztywność,
dynamika i sterowanie, i tym podobne, w wielkiej przestrzeni rozwiązań
konstrukcyjnych. Z prostych trzech prostopadłych pryzmatycznych połączeń
kinematyka obrabiarki może czerpać dużo możliwych konfiguracji (1 np). Kilka
prac (np.1), zaproponowały metody do systematycznego opisywania tych
konfiguracji oraz do generowania różnych topologicznych połączeń.

Nemeth & al. address the configuration design of cartesian machine from the
geometric interference of components and static stiffness points of view [4] and
also including the modal freąuencies [5]. With the aim in view the authors use a
rigid body - elastic joint model and a systematic description of uniąue
configurations, from which 6912 main variants are generated (orientations
without directions) and 58016 sub-variants! Furthermore the description is based
on only one configuration of rolling guideway and feed drive that is composed of 2
roller ways, 4 rolling pads and a driving force located at the center point of the 4
rolling pads Consequently, this great number of combinations doesn't include
exotic configurations such as the gantry type or box in box type machine tool (cf.
figures 1 and 4 for guideway configurations).
Nemeth & al. zajęli się konfiguracją projektowania obrabiarki na podstawie
geometrycznych zakłóceń części składowych, statycznej sztywności oraz
zawierając modalną częstotliwość. Do uzyskania obranego celu autorzy
wykorzystali sztywny korpus – elastyczny model połączeń oraz systematyczny
opis niepowtarzalnych konfiguracji, z których zostało wygenerowanych 6912
głównych wariantów (orientacje bez kierunków) oraz 58016 pod-wariantów.
Ponadto opis ten oparty jest tylko na jednej konfiguracji walcowanej prowadnicy z
napędem przewodów zasilających na które składają się 2 rolek prowadzących, 4
rolkowe podkładki i siły napędowej umiejscowionej w centralnym punkcie tych 4
rolkowych podkładek. W konsekwencji, tak duża liczba kombinacji nie zawiera tak
egzotycznych konfiguracji jak typ suwnicy, czy też typ skrzynia w skrzyni
obrabiarki (por. rysunki 1 i 4 dla konfiguracji prowadnicy).

The study has been recently extended to box in box configuration [6] but with
only four combinations of guideway configuration. In view of the impact of the
feed drive and guideway configuration on high speed behaviour, a more extensive
description for dynamic modelling is needed.
Moreover modularity of machine tools greatly facilitates the description of each
component and the computation under local load while the global dynamic
behaviour of the component assembly can be validated by fitting the simplified
elasto-dynamic model of each component. At this stage of design the component
configuration and the embodiment are completely defined and the simplified
dynamic model are based on the finite element model of each structural
component available from solid modeller [11,12]. One way to address the
configuration design issue is the hierarchical decomposition of the machine
design [13] and optimisation [14].
Ostatnio badania zostały rozszerzone i objęły również konfigurację ‘skrzynia w
skrzyni’, jednak tylko z 4 kombinacjami konfiguracji prowadnicy. Jeśli chodzi o
wpływ napędu zasilającego oraz konfiguracji prowadnicy na wysokoobrotowość,
potrzebny jest bardziej szczegółowy opis dla modelu dynamiki.
Co więcej modułowość obrabiarek doskonale ułatwia opis każdej części składowej
oraz mogą być również potwierdzone obliczenia dotyczące montażu podzespołów
pod miejscowym obciążeniem podczas zachowania dynamicznego przez
dopasowanie uproszczonych elastycznych i dynamicznych modeli każdej części
składowej. Na tym etapie projektowania konfiguracja składowa i jej wykonanie są
w pełni zdefiniowane, a uproszczone modele dynamiczne opierają się na
skończonym modelu elementu każdej strukturalnej części składowej dostępnej z
litego modelarza. Jednym ze sposobów zajmowania się kwestią konfiguracji
projektowania jest hierarchiczny rozkład projektu maszyny i optymalizacja.

2.2 Proposition of a 2-level design approach
Because the detailed description of design solutions leads to a great number of
combinations it is suggested to break down the design into two levels rather than
an optimisation of a few parameters based on detailed model of machine. From a
hierarchical decomposition of the problem a two-level approach of design can be
formulated. The first level addresses the design of the component configuration
whereas the second emphasises the embodiment and the detailed design of each
component. Thus the first level focuses on the selection of component types and
their arrangement. At this level, a dynamic model had to help designers assess if
a candidate solution of component configuration could achieve the dynamic
requirements and understand why it might fail.
2.2 Propozycja projektu dwupoziomowego
Jako, że szczegółowy opis rozwiązań projektowania prowadzi do dużej liczby
kombinacji, sugeruje się rozdzielenie projektu na dwa poziomy bardziej niż
opieranie się przy optymalizacji kilku parametrów opartych na szczegółowych
modelach maszyny. Dzięki hierarchicznemu rozkładowi problemu można
opracować dwupoziomowe podejście do projektowania. Poziom pierwszy
skierowany jest na projektowanie części składowych konfiguracji, podczas gdy
poziom drugi podkreśla jego wcielenie i szczegółowe projektowanie każdej
składowej. Tak więc poziom pierwszy koncentruje się na wyborze rodzajów części
składowych i ich układzie. Na tym poziomie model dynamiczny miał pomóc
projektantom uzyskać dostęp do informacji czy proponowane rozwiązanie dla
składowej konfiguracji mogłoby osiągnąć wymogi dynamiczne i miał również
ułatwić zrozumienie dlaczego to rozwiązanie mogłoby zawieść.

Moreover the configuration of the guideway components and the location of
actuator forces defined at the first level entail geometrical and mechanical
consequences for the second one. Indeed these design choices lead, on the one
hand, to clearance and mass requirements for the second level so that they
restrain the embodiment area of each structural component. On the other hand,
the guideway and actuator configuration imposes the boundary conditions and
load distributions to these structural components The second level focuses on the
embodiment of the structural components and the detailed design of functional
components such as feed drive. After achieving the design of the components,
they can be assembled in a simplified dynamie model for global analysis [12] and
validation with control system [11].
Co więcej konfiguracja elementów prowadnicy oraz umiejscowienie siłownika
określone w pierwszym poziomie pociągają za sobą geometryczne i mechaniczne
konsekwencje w drugim poziomie. Rzeczywiście wybory związane z projektem
prowadzą z jednej strony do oczyszczenia masowych wymagań dla drugiego
poziomu tak, że ograniczają wcielenie każdego składowego elementu. Z drugiej
strony, konfigurację prowadnicy i siłownika narzuca warunek brzegowy i rozkład
obciążeń dla tych części składowych. Poziom drugi skupia się na wcielaniu
strukturalnych części składowych oraz szczegółowym projektowaniu
funkcjonalnych części składowych takich jak napęd zasilający. Po opracowaniu
projektu części składowych, mogą one być montowane w uproszczonym modelu
dynamicznym dla ogólnej analizy oraz dla zatwierdzenia systemu kontrolnego.

Finally, the second level design can use a classical way with solid modeller and
Finite Element Method whereas the first level need a simplified dynamic model for
configuration description, Consequently, a rigid body-elastic joint model is useful
like in studies [4,5,15,10,8], This question is developed in section 3 thanks to a
short analysis of the connection between component configuration and dynamic
behaviour in the next section,
2.3 Analysis ofbody tilting in cartesian machines
A critical function of high speed machine tools is to yield a motion of the tool in
the workpiece reference frame along a stated trajectory with speed and accuracy
requirements.
W końcu, drugi poziom projektowania może stosować klasyczne sposoby litego
modelarza oraz Metodę Elementów Skończonych podczas gdy w poziomie
pierwszym dla opisu konfiguracji potrzebny jest uproszczony model dynamiczny.
W konsekwencji, ciało doskonale sztywne – sprężysty model spoiny jest
przydatny w badaniach [4,5,15,10,8]. To zagadnienie rozwinięte jest w rozdziale
3. dzięki krótkiej analizie połączenia pomiędzy składowymi konfiguracji a
zachowaniem dynamicznym zawartej w następnej sekcji.
2.3 Analiza korpusu w trójosiowej obrabiarce
Kluczowym zadaniem wysokoobrotowych maszyn jest uzyskanie ruchu narzędzia
w układzie odniesienia obrabianego przedmiotu wzdłuż określonej trajektorii z
zachowaniem wymogów prędkości i precyzji.

Therefore the dynamic behaviour of the machine has to be analysed from this point of
view, The dynamic behaviour depends on both the feed drive system of each
translational axis (X,
and Z) and the machine structure, i.e. the guideways and the bodies under actuator
force load, These two positioning error sources create a deviation of the desired
traaectory, the so- called tool tip error, that is, three translational errors (ɛ
x
, ɛ
y
, ɛ
z
) at
the tool tip center along X,
and Z axes and two rotational errors (0
x
, 0
y
) of the spindle axis, Z, The feed drive
mechanism error causes linear errors related to feedback error
2
, so that the three feed
drive systems can be designed quite independently
3
, Whereas the feed drive is an 1-
axis system, the machine structure is much more complex, The elastic deformation of
machine structure results at once in angular errors and linear errors with respect to
both linear deformation and angular deformation combined with some characteristic
lengths of the machine (so-called Abbe's offset), Therefore the structure deformation
induced errors depend not only on the features of each component but also on the
overall configuration of the machine.
Ponadto z tego punktu widzenia musi być przeanalizowane zachowanie dynamiczne
maszyny. Dynamiczne zachowanie zależy zarówno od układu napędu zasilającego
każdej osi przełożenia (X, Y i Z), jak również struktury maszyny, np. prowadnice,
jednostki pod obciążeniem siły siłownika. Te dwa źródła pozycjonowania błędów tworzą
odchylenie pożądanej trajektorii, zwane granicą błędu, czyli trzy błędy przełożenia (ɛ
x
,
ɛ
y
, ɛ
z
) wzdłuż osi X, Y i Z oraz dwa błędy obrotowe (θ
x
, θ
y
) w osi wrzeciona, Z. Błąd
mechanizmu napędu zasilającego powoduje błędy liniowe związane z błędami
sprzężenia zwrotnego, tak, że trzy układy napędowe mogą zostać zaprojektowane
całkiem niezależnie. Zważywszy na to, że napęd zasilający jest układem
jednoosiowym, struktura maszyny jest znacznie bardziej skomplikowana. Odkształcenie
struktury maszyny skutkuje naraz błędami kątów i błędami liniowymi w odniesieniu do
deformacji zarówno liniowej, jak i kątowej w połączeniu z niektórymi
charakterystycznymi odległościami (tak zwane przesunięcie Abbe’ego). Ponadto
struktura odkształcenia wywołanego błędami zależy nie tylko od właściwości każdej
części składowej ale również ogólnej konfiguracji maszyny.

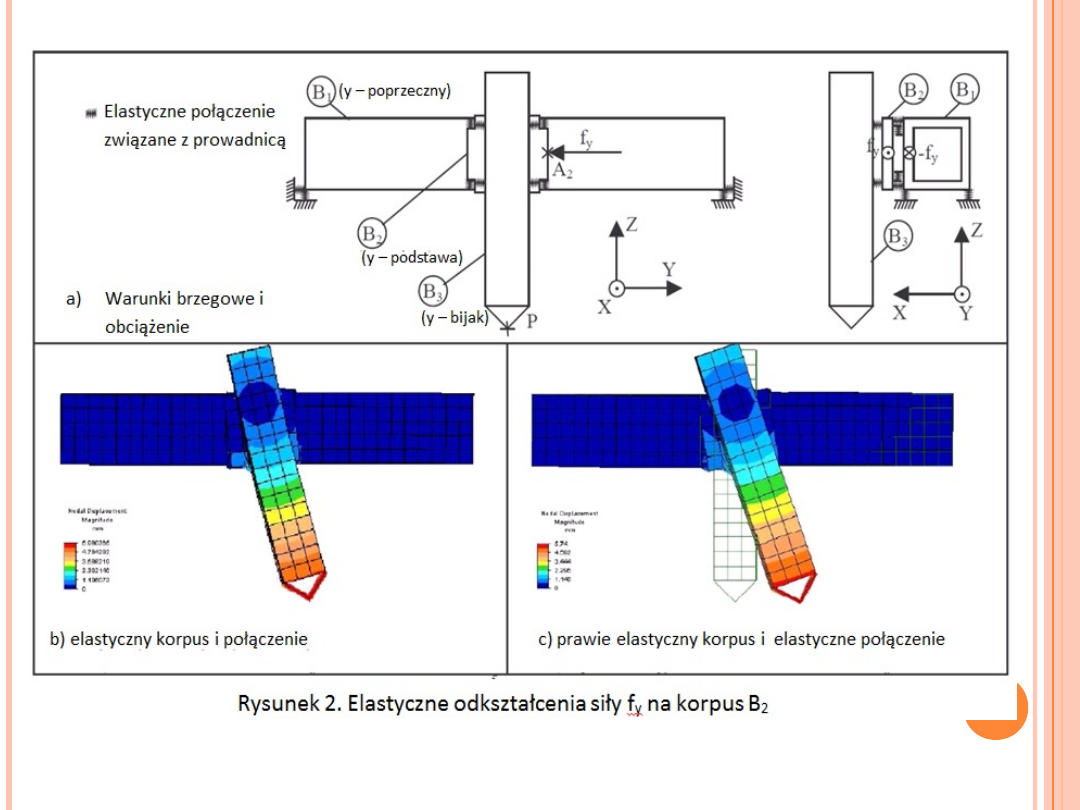
A simple example - a gantry structure, cf, figure 1 - is analysed to highlight the
connection between the component configuration and the tool tip error under
dynamic load, The case $ of the figure 2 shows the deformation of the machine
structure, except the base, due to the actuator force f
y
according to Y axis during
an accelerated motion
4
along this That produces linear errors along Y and Z axes
and angular error about X axis. The case c (see figure 2) exhibits a similar
behaviour to case $ while the bodies are quasi-rigid, i,e, the deformation was
computed with a very high value of Young's modulus. Besides, the results of the
modal analysis in both cases are closed for the first modes, e,g, the frequencies
of the bending mode in the YZ plan are 45,5 Hz in case $ and 48,5 Hz in case c,
As proposed in section 2,2, a rigid body-elastic joint model can be used to
analyse the cause and the consequence of this phenomenon with respect to the
configuration.
Prosty przykład – struktura suwnicy, numer 1, została zanalizowana aby
podkreślić związek pomiędzy konfiguracją części składowych, a granicą błędu
pod dynamicznym obciążeniem. Przykład b ,ryc. 2., pokazuje odkształcenie
struktury maszyny, z wyjątkiem podstawy, spowodowane siłą siłownika f
y
względem osi Y podczas przyspieszonego ruchu. Prowadzi to do błędów liniowych
wzdłuż osi Y i Z oraz błędów kątowych wokół osi X. Przykład c (patrz ryc. 2)
wykazuje podobne zachowanie jak w przypadku b kiedy korpusy są niemal
sztywne, np. odkształcenie obliczono z bardzo wysokiej wartości modułu Young’a.
Poza tym, wyniki analizy modalnej w planie YZ to 45,5 Hz w przypadku b i 48,5
Hz w przypadku c. Jak zaproponowano w sekcji 2.2 ciało doskonale sztywne –
sprężysty model spoiny może być wykorzystany do analizy przyczyny i
konsekwencji tego zjawiska w odniesieniu do konfiguracji.

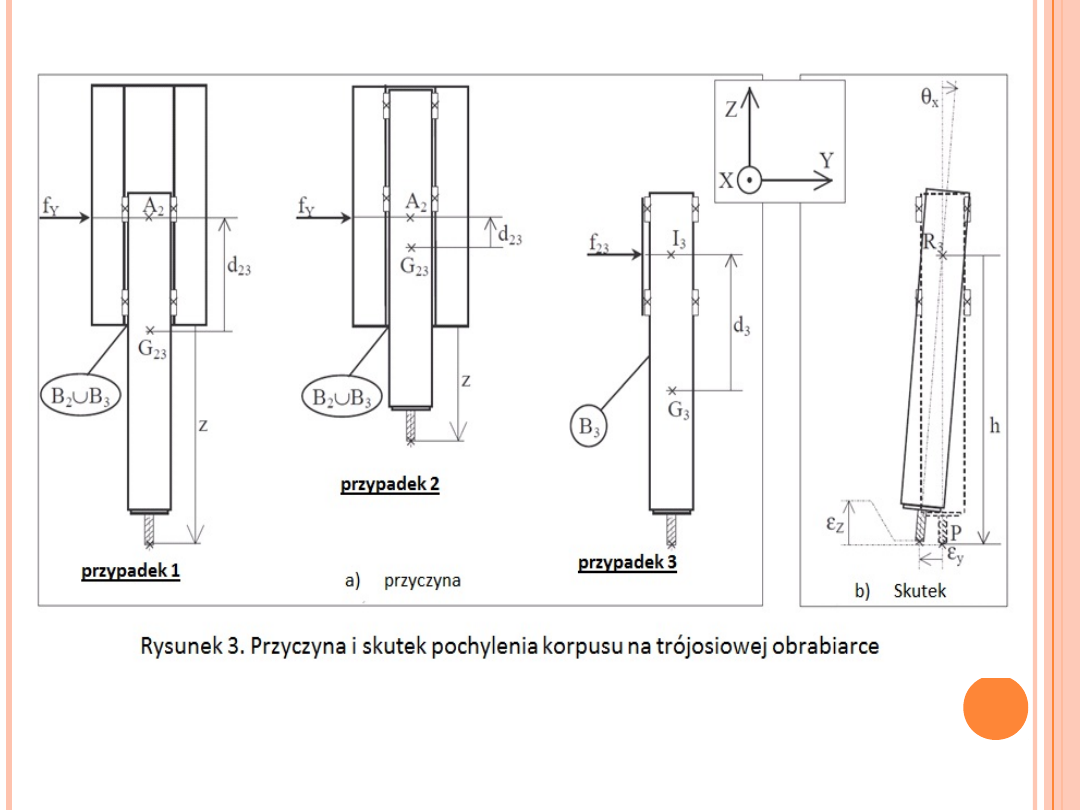
The actuator force f
y
causes a tilting of bodies B
2
an B
3
, that is, an undesirable
small rotation of the bodies during the translation along Y axis. This is due to the
force f
y
that is applied to a point A
2
(see figure 3, cases a.1 and a.2) different from
the center of masses G
23
of the moving part (bodies B
2
and B
3
) together such as
the distance d
23
between the two points is variable and depends on the position z
of the ram, The moment at point G
23
induced by the distance d
23
results in
deformation of the guideway components In the same way, the resultant of the
force f
23
from the body B
2
to the body B
3
(see figure 3, case a 3) is applied to a
point I
3
that depends on the component configuration of the guideway of B
3
/B
2
, So
that the distance d
3
between point I
3
and the center of mass G
3
of B
3
is the cause
of the tilting of the body B
3
.
Siła napędu f
y
powoduje przechylenie korpusów B
2
i B
3
, które jest niepożądaną
niewielką rotacją korpusów podczas przesunięcia wzdłuż osi Y. Jest to
spowodowane siłą f
y,
która jest zastosowana do punktu A
2
(patrz ryc 3, przykład
a.1, a.2), różniącą się od środka mas G
23
ruchomych części (korpus B
2
i B
3
),
wspólnie tak jak odległością d
23
pomiędzy dwoma punktami jest zmienna i zależy
od pozycji bijaka. Moment w punkcie G
23
wywołany odległością d
23
skutkuje
odkształceniem części składowych prowadnicy. W ten sam sposób siła wypadkowa
siły f23 z ciała B
2
na B
3
(patrz ryc. 3, przykład a.3) została zastosowana do punktu
I
3
, co zależy od konfiguracji części składowych prowadnicy B2/B3. Tak więc
odległość d3 pomiędzy punktem I
3
i środkiem masy G
3
z B
3
jest przyczyną
przechylenia korpusu B3.

Therefore the guideways are important not only for their stiffness characteristics
but especially for the load distribution on bodies induced by their component
configuration, Thus we can understand how the geometrical arrangement of the
guideway components and the actuator force location cause body tilting and
consequently angular errors Moreover, the consequence of this phenomenon is
obviously the tool tip position error, Indeed the tilting angle 0 combined with the
Abbe's offset h generate for example (see figure 3$) an error along Y : ɛ
y
= h sin
θ ~ h θ, The Abbe's offset h is the distance between the tool center point P and
the instantaneous center of rotation (IRC) R
3
of the planar motion of B
3
in a
reference frame attached to a non-tilting motion of bodies The ICR R
3
depends on
the dynamic behaviour.
Ponadto prowadnice są ważne nie tylko przez ich cechy sztywności ale zwłaszcza
przez rozkład obciążeń na korpusach wywołanych przez konfiguracje ich
składowych. W ten sposób możemy zrozumieć jak układ geometryczny części
składowych prowadnicy i lokalizacji siły siłownika wpływa na przechylenie
korpusu i w konsekwencji błędy kątowe. Co więcej konsekwencją tego zjawiska
jest oczywiście pozycja granicy dopuszczalnego błędu. Rzeczywiście przechylenie
kąta θ w połączeniu z przesunięciem Abbe’ego h wywołuje np. (patrz ryc 3.b)
błąd wzdłuż Y : ε
y
= sin θ h θ. Przesunięcie Abbe’ego h to odległość pomiędzy
środkowym punktem urządzenia P a chwilowym środkiem rotacji (IRC) R
3
płaszczyznowego ruchu B
3
w układzie odniesienia dołączonym do
nieprzechylającego ruchu korpusów. Chwilowy środek rotacji R
3
zależy od
zachowania dynamicznego.

As a simple example, this planar study of two bodies (B
2
and B
3
) depicts how the
configuration components affect the tool tip error, Nevertheless the behaviour of
a spatial configuration with three moving bodies is much more intricate, A
systematic modelling method is developed in the next section so as to design
and analyse a machine configuration, A more detailed analysis of tilting
phenomena related to configuration is provided in [9], Futhermore, Weickert
developed a measuring apparatus of the tool tip position and orientation to lead
experimental study on high speed machine tools [15], At the same time, the
author made simulation based on rigid body-elastic joint models in agreement
with experimental results and also showed the tilting of bodies resulting in tool
tip error.
Jako prosty przykład, to płaszczyznowe badanie dwóch korpusów (B2 i B3)
przedstawia jak konfiguracja części składowych wpływa na granicę błędu
urządzenia. Jednakże zachowanie konfiguracji przestrzennej z trzema ruchomymi
korpusami jest znacznie bardziej zawiłe. Systematyczne metody modelowania
zostały przedstawione w kolejnej sekcji, czyli jak zaprojektować i zanalizować
konfigurację maszyny. Bardziej szczegółowa analiza zjawiska przechylenia w
odniesieniu do konfiguracji została przedstawiona w sekcji [9]. Co więcej,
Weickert rozwinął aparaturę pomiarową do prowadzenia eksperymentalnych
badań nad wysokoobrotowymi maszynami. W tym samym czasie, autor
przeprowadził symulację opartą na sprężystym modelu spoiny w zgodzie z
eksperymentalnymi wynikami i pokazał przechylenie korpusów wynikające z
naruszenia granicy błędu.

3 Dynamie model of machine configuration
The requirement of the first level of design (cf. section 2.2) and the tilting analysis (cf.
section 2.3) lead to the development of a simplified dynamic model for configuration
description and design. Usually, lumped parameter models are used to represent the
general behaviour [4,5,15]. We briefly depict in this section the generation of model.
The symbolic modelling of machine is developed in order to describe the various
possible configurations thanks to its parameterisation. Most of the parameters are the
design variables.A counter- example is the inertial properties of bodies which depend
on their embodiment. Thus, either the mass of each body is assessed from the
designer's experience/intuition, or it can be a design constraint for second level of
design. Starting from the rigid body assumption, a moving body B
i
is characterised by
its center of mass G
i
and its mass matrix M
i.
3. Dynamiczny model konfiguracji maszyny
Wymóg pierwszego etapu konstruowania (rozdział 2.2) i analiza odchylenia
(rozdział 2.3) prowadzą do rozwoju uproszczonego modelu dynamicznego
opisu konfiguracji i konstrukcji. Zazwyczaj, oszacowane modele parametrów
są wykorzystywane do przedstawiania ogólnego zachowania [4,5,15]. W tym
rozdziale krótko przedstawimy generację modelu. Symboliczne modelowanie
obrabiarki zostało opracowane w celu opisania różnych możliwych
konfiguracji w zależności od jej parametryzacji. Większość parametrów jest
projektowana zmiennie. Kontrprzykładem są inercyjne właściwości korpusów
które zależą od ich postaci. Tak więc, albo masa każdego korpusu jest
oceniana przez doświadczenie/intuicję projektanta, albo może być
ograniczona przez drugi etap konstruowania. Począwszy od sztywnego
złożenia korpusu, ruchomy korpus B
i
jest charakteryzowany przez jego
środek masy G
i
i macierz masy M
i
.
The generalized velocity (translation and rotation) of the reference frame with origin
G
i
attached to the body B
i
(the so-called body reference frame) is written with respect
to the base reference frame, denoted by the vector X., so that the total kinetic energy
of the cartesian 3- axis machine is :
Uogólniona prędkość (translacja i rotacja) układu odniesienia z
pochodzenia G
i
dołączona do korpusu B
i
(tak zwany układ odniesienia
ciała) jest napisana w odniesieniu do bazy układu odniesienia i
oznaczona przez wektor X
i
, więc całkowita energia kinetyczna
kartezjańskiej 3-osiowej maszyny jest:
From the external forces (actuator forces) acting upon body B
i
, denoted by vector f
i
,
we can express the resulting wrench F
i
at the center of mass G
i
by the next linear
equation :
where the matrix E
i
. is derived from the location in the body reference frame
of the points on which the forces act . The complete symbolic description of
the configuration can be found in [10] .
Od sił zewnętrznych (siła napędu) działających na korpus B
i
, oznaczonych
przez wektor f
i
, możemy wyrazić klucz wynikowy F
i
w centrum masy G
i
przez
następujące równanie liniowe:
Gdzie macierz E
i
, pochodzi z lokalizacji w układzie odniesienia ciała z
punktów w których pochodzą siły. Kompletny symboliczny opis konfiguracji
można znaleźć w [10].
In order to represent all kinds of component configurations of guideway (e .
g.see figure 4), we can use a model of equivalent elasticjoint if an
elasticjoint center exists [7] . Hence, at the particular point I. that
designates the elastic joint center of the guideway between B. and B
i-1
, we
can recognize principal transversal stiffness and principal torsional stiffness
[7] arranging in the matrices Kii and K
i
, respectively, which is a useful form
for the guideway configuration design (cf figure 4). Let us represent the
small deformations that occur in the guideway between B
i
and B
i-1
by dl
i
for
the relative linear displacement at the point I
i
and 80
i
for the relative
angular displacement, so that the total elastic potential energy is defined by
:
W celu przedstawienia wszystkich elementów konfiguracji prowadnicy (np.
rysunek 4), możemy użyć odpowiedniego modelu elastycznego połączenia
jeżeli środek elastycznego połączenia istnieje [7]. Stąd, w szczególności w
punkcie I
i
który wyznacza środek elastycznego połączenia prowadnicy
pomiędzy B
i
i B
i-1
, możemy wyznaczyć główną poprzeczną sztywność i główną
sztywność skrętną aranżacji odpowiednio w matrycach K
i
i k
i
, co jest przydatną
formą projektowania konfiguracji prowadnicy (rysunek 4). Pozwala to
zobrazować małe odkształcenia występujące w prowadnicy pomiędzy B
i
i B
i-1
przez dI
i
dla względnego przemieszczenia liniowego w punkcie I
i
i δθ
i
dla
względnego przemieszczenia kątowego, więc całkowity elastyczny potencjał
energii definiowany jest przez:
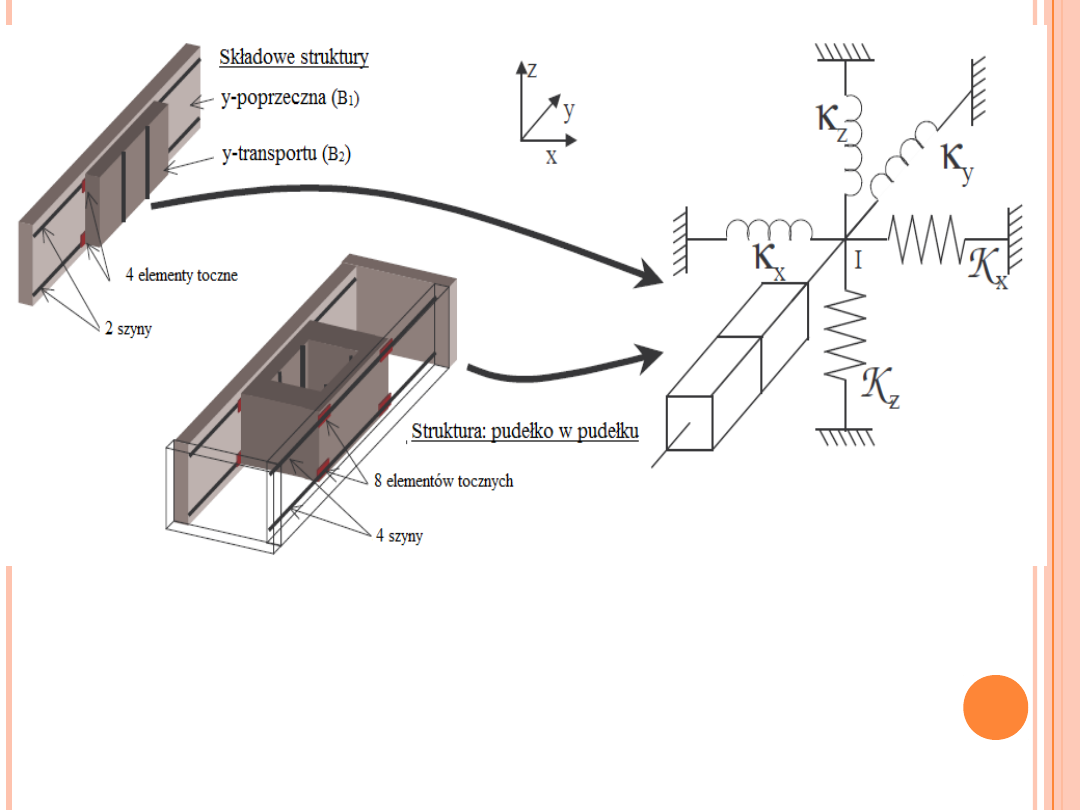
Rysunek 4. Przykłady konfiguracji
prowadnicy
Rysunek 5. Odpowiednik
elastycznego połączenia
This model doesn't include gravity terms because apparatus for
static balancing is commonly used in machine tools Because of the
following use of the dynamic model, it is more convenient to define
a set of relative generalized coordinates q, namely the linear
coordinate of G
i
and the angular coordinate of the body B
i
in the
body reference frame attached to B
i-1
. Consequently, as the
deformations are assumed to be small, the following linear
transformations are written according to body and guideway
configuration, respectively :
Ten model nie wyklucza działania grawitacji ponieważ aparatura do
statycznego wyważania jest powszechnie stosowana w
obrabiarkach. Z powodu używania następującego modelu
dynamicznego, jest bardziej wygodne do zdefiniowania ustawienie
uogólnionych współrzędnych q, mianowicie, liniowej współrzędnej
G
i
i kątowej współrzędnej ciała B
i
w układzie odniesienia ciała
dołączonego do B
i-1
. Tak wiec, odkształcenia uznawane są za małe,
a następujące przekształcenia liniowe są opisane według korpusu i
konfiguracji prowadnicy, odpowiednio:
where q
ei
is a sub-vector of q that contains the generalized elastic displacements of
body B.. We note q
e
T
= [... q
e i
T
... ] and q
r
that is the second sub-vector of q that
contains the three rigid body displacements along X, Y, and Z axis such as q
r
and q
e
form together the vector q after rearranging their components By including
respectively equations (4) and (5) in equations (1) and (3) the energies can be
rewritten as :
and the Rayleigh dissipation function D can be expressed in a similar form to
equation (7):
Gdzie q
ei
jest sub- wektorem q który zawiera uogólnione elastyczne
przemieszczenia korpusu B
i
. Zauważamy q
e
T
= [... q
e i
T
... ] i q
r,
to jest drugi sub-
wektor q który zawiera trzy sztywne przemieszczenia korpusu wzdłuż osi X,Y i Z
takich jak q
r
i q
e
razem z wektorem q po rozmieszczeniu ich komponentów. Po
podstawieniu odpowiednich wzorów (4) i (5) w równanie (1) i (3) energie mogę być
przepisane jako:
i funkcja D rozproszenia Raylei’a może być przedstawiona w podobnej formie jak
równanie (7):
Moreover, in view of eq. (4) the generalized forces Q associated with the coordinates q
are related to the wrench F with the principle of the virtual work.Including the eq. (2)
yield consequently the definition of Q with respect to actuator forces f:
Q = H
T
F = Sf with S = H
T
E
(9)
Co więcej, ze względu na równanie (4) uogólnione siły Q powiązane
współrzędnymi q są związane z kluczem F zgodnie z zasadą wirtualnej pracy.
Włączając równanie (2), wydajność w zgodzie z definicją Q w odniesieniu do
siłownika sił f:
Q = H
T
F = Sf z S = H
T
E
(9)
Afterwards the symbolic dynamic model can be derived from equations (6) to (9)
thanks to the Lagrange's equations.This is made in a partitioning form according to
[q
r
T
q
e
T
] :
Potem symbole dynamicznego modelu można wyprowadzić z równań od (6) do (9)
dzięki równaniom Lagranga. Stało się to w formie partycjonowania według [q
r
T
q
e
T
] :

The body tilting can be recognized as the angular displacement components of
the elastic deformation vector q
e
. Let us consider a uniform accelerated motion,
that is express as q
r
= y=[ y
x
Y
y
y
z
]
T
in order to extract from eq. (10) the elastic
deformation vector q
e.
In view of a control system (feedback and dynamic
feedforward) correctly tuned we can assume that the actuator forces are
constant after a transient response and take the value derived from eq. (10):
Dynamic feedforward underlies a velocity and an acceleration feedforward
equivalent to the inverse dynamic model without elasticity of the feed drive
with its load as eq. (11).
f = S-HY
(11
)
so that the eq. (10) yield after including eq. (11) :
MeCie + Cqe + Kqe = (Se S-
1
Mr - M
re
)Y
(12)
Odchylenie korpusu może być uznane za odchylenie kontowe elastycznej
deformacji wektora q
e
. Rozważmy jednolity przyspieszony ruch, jest wyrażany
jako q
r
= y=[ y
x
Y
y
y
z
]
T
w celu wyodrębnienia z równania (10) elastycznej
deformacji qe. Ze względu na poprawnie nastawiony system kontroli
(sprzężenie zwrotne i dynamiczne wyprzedzenie), możemy założyć, że
siły napędów są stałe po odpowiedzi impulsowej i przyjmują wartość
pochodzącą z równania (10):
f = S-HY (11)
Tak, że równanie (10) po podstawieniu równania (11) wyrażone jest:
MeCie + Cqe + Kqe = (Se S-
1
Mr - M
re
)Y
(12)
The eq. (12) defines the damping system that governs the elastic deformation for
which the term on the right side is constant. Therefore the elastic deformation
stabilises, i.e. q
e
= q
e
= 0, around the following value :
This algebraic equation is useful to analyse and design a configuration with the
smallest tilting as seen in the next section.
Równanie (12) definiuje system tłumienia, który reguluje elastyczne
odkształcenie, którego okres po prawej stronie jest stały. Dlatego
elastyczna deformacja stabilizuje, to jest q
e
= q
e
= 0, wokół następującej
wartości:
To równanie algebraiczne jest przydatne do analizy i konstruowania
konfiguracji z najmniejszym przechyleniem jak widać w następnym
rozdziale.

4 De s ign and analys is of machine configuration
4.1 Method to provide design guideline
The symbolic equation (13) can be used to extract some design guidelines of
component configuration [10]. The eq. (13) is a function of design variables such as
geometric parameters of actuator location and center of elastic joint and also
stiffness.Thus to cancel the elastic deformation as much as possible we research the
algebraic conditions of the following equation :
K
-1
(SeS-
1
Mr - Mre)7 = [0]
(14)
where [0] is a column matrix of zero. The symbolic solver of Maple software has been
used to generate the solution of eq. (14).
4. Projektowanie i analiza konfiguracji maszyny.
4.1 Sposób, aby zapewnić wytyczne projektowe
Symboliczne równanie (13) może być użyte do wyodrębnienia pewnych wytycznych
konstrukcyjnych konfiguracji komponentów [10]. Równanie (13) jest funkcjom
zmiennych projektowych, takich jak, parametrów geometrycznych lokalizacji
siłownika i centrum elastycznego złącza, a także sztywności. W ten sposób, aby
zmniejszyć odkształcenie w jak największym stopniu badamy algebraiczne warunki
następującego równania:
K
-1
(SeS-
1
Mr - Mre)7 = [0] (14)
Gdzie [0] jest kolumną macierzy zerowej. Symboliczne rozwiązanie oprogramowania
Maple’a został użyty do wygenerowania rozwiązania równania (14).

Z jednej strony dla kinematycznego łańcucha jednego lub dwóch korpusów na podstawie,
zestaw warunków algebraicznych może być stosowany do tłumienia wychylenia korpusu, to
jest, kątowe wychylenia są równe zero ale oczywiście nie na wzdłużnej deformacji. Z tych
warunków pochodzą zarówno mechaniczny zbiór wytycznych projektowych i kontrola
systemów napędowych, a także ustalenia niezbędnej liczby (1,2 lub 3) serwonapędów na oś i
ich położenie kiedy drugi z nich prowadzi do utworzenia oddzielnych zasad kontroli, które
będą zastosowane do serwonapędów. Na przykład rysunek 6 obrazuje stosowanie
wytycznych projektowych, które dają rozwiązanie konfiguracji bez odchylenia. Zasada
kontroli stosowana do obu sił f
Y1
i f
Y2
zapewnia, że wynikające z tego oddziaływanie na środki
mas G
23
części ruchomej B
2
i B
3
[16]. W szczególności rolki muszą być przymocowane do
ramy w sposób jaki przedstawiono na rysunku 6, konfiguracja na rysunku 7 generuje zmienny
dystans d
3
wzdłuż „z” pomiędzy środkiem elastycznego połączenia I
3
i środkiem masy G
3
który zależy od lokalizacji bijaka ponieważ rolki prowadzące są przymocowane do bijaka, więc
zmienne przechylenie występuje w drugim rozwiązaniu.
On the one hand for a kinematic chain of one or two bodies on the base, a set of algebraic
conditions can be applied to suppress the body tilting, that is, the angular deformation are
equal to zero but obviously not the longitudinal deformation. From these conditions both
mechanical design guidelines set and control schemes of actuators are derived. The first
ones allow to locate the elastic joint centers and to state constraints on stiffness of the
guideways and also to establish the necessary number (1, 2 or 3) of servomotor per axis and
their locations while the second ones lead to setting up a decoupling dynamic control law to
be applied to servomotors. For instance the figure 6 represents the application of the design
guidelines that yields a solution of configuration without tilting.The control law applied to
both actuator forces f
Y1
and f
Y2
ensures that the resultant acts upon the center of masses G
23
ofthe moving part B
2
and B
3
[16]. In particular the rolling pads had to be fixed to the ram as
done on the configuration of figure 6, whereas the configuration of figure 7 generates a
variable distance d
3
along z between the elasticjoint center I
3
and the center of mass G
3
which depends on the ram location because the roller ways are fixed to the ram, so that a
variable tilting occurs in this second solution.
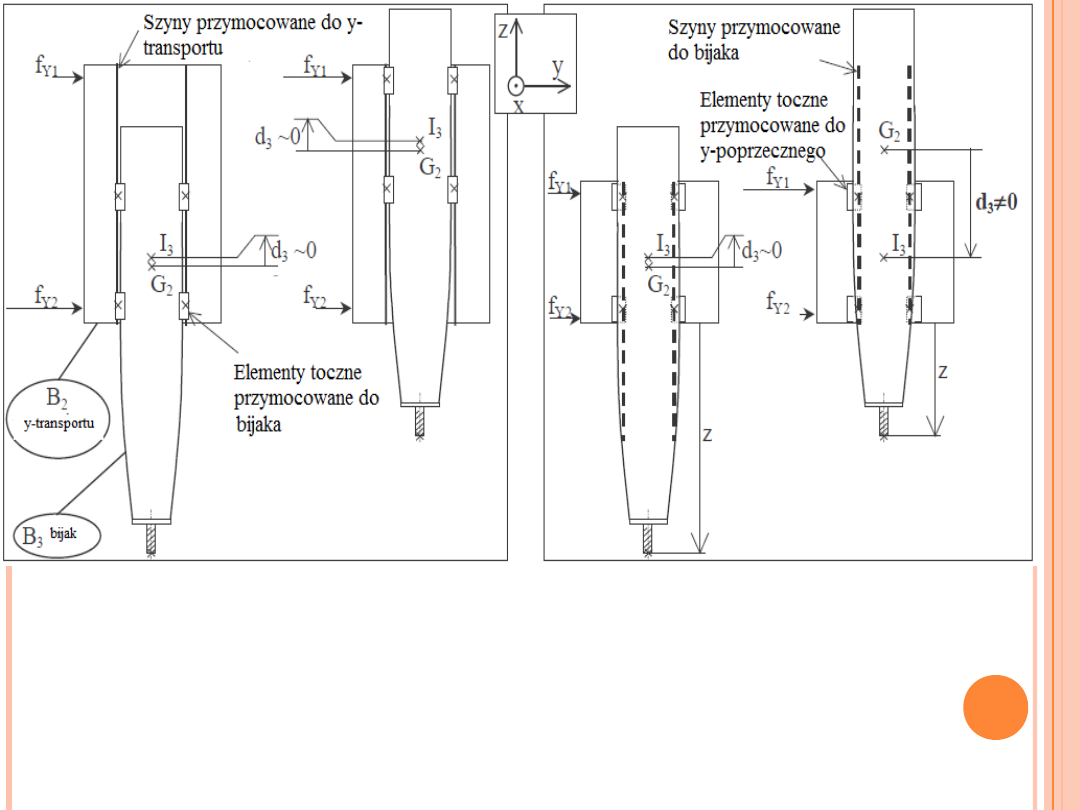
Rysunek 6.
Konfiguracja bez
odchylenia
Rysunek 7.
Odchylenie zależne
od pozycji bijaka

On the other hand for a kinematic chain of three bodies on the base, additional
guidelines are generated, nevertheless it is shown that the body tilting can't be
suppressed completely [10]. In order to evaluate the configuration design and to
reduce the consequence of the body tilting on the tool tip error, a method of analysis
was developed.
Z drugiej strony dla kinematycznego łańcucha trzech korpusów na
podstawie, dodatkowe wytyczne są generowane, niemniej jednak okazuje
się, że odchylenie korpusu nie może być całkowicie stłumione.

4.2 Dynamic error assessment for configuration analysis [8]
The method aims to facilitate the design process, especially when alternate
configuration candidates had to be compared and when a configuration solution had to
be improved. The tool tip position error £ is assessed for an acceleration along the
three axes.With the location of the tool tip center P in the reference frame attached to
body B
3
, a linear transformation can be formulated in a similar way to eq. (4) to yield
the tool tip position error £ from the elastic generalized displacement q
e
:
£ = H=qe
(15)
From the equations (13) and (15) we obtain the relation between the acceleration Y
=[ Yx Yy Y
z
]
T
imposed by the feed drive and the tool tip position error £
T
= (£
x
£
y
£
z
).
£ = Sm y with Sm = H
p
K
-
(S
e
S
r
-1
M
r
- M
re
) (16)
4.2 Dynamiczna ocena błędu analizy konfiguracji.
Metoda ma na celu ułatwienie procesu projektowania, zwłaszcza, gdy alternatywne
konfiguracje muszą być porównane i gdy rozwiązanie konfiguracji musi być poprawione.
Błędu położenia głowicy £ ocenia się na podstawie przyspieszenia wzdłuż trzech osi.
Wraz z położeniem środka głowicy P w układzie odniesienia korpusu B
3
, liniowe
przekształcenie może być podobnie formuowane jak równanie jak równanie (4) które
usuwa błąd położenia głowicy z uogólnionego elastycznego przemieszczenia:
£ = H=qe (15)
Z równań (13) i (15) otrzymujemy związek pomiędzy przyspieszeniem Y =[ Yx Yy Y
z
]
T
nałożonym przez podajnik napędu i błąd położenia głowicy £
T
= (£
x
£
y
£
z
).
£ = Sm y with Sm = H
p
K
-
(S
e
S
r
-1
M
r
- M
re
) (16)

where Sm is a square matrix that contains quadratic functions of axis
coordinates.The matrix doesn't have a diagonal form so that it expresses
a dynamic coupling between the axes as we can see in figurę 8 with the
error e
y
yielding by an acceleration along Z axis.However we must keep
in mind the small values of errors due to the stationary analysis and also
to the rigid body assumption . The transient response of the dynamic
model on the one hand and the elastic body consideration on the other
hand can lead to a more important tool tip error. The presented error
analysis method provides some qualitative information for the
configuration analysis and re-design . The results of the figures 8 and 9
are extracted from a study of an horizontal machining center (HMC) with
a box-in-box structure [2].
Gdzie Sm jest kwadratową macierzą która zawiera skoordynowane
kwadraty funkcji osi. Macierz nie ma diagonalnej struktury więc
wyraża dynamiczne sprzężenie pomiędzy osiami jak widać na
rysunku 8 z błędem e
y
przenoszącym przyspieszenie wzdłuż osi Z.
Jednak musimy mieć na uwadze małe wartości błędów ze względu
na stacjonarną analizę i sztywne założenie korpusu. Chwilowa
reakcja z jednej strony dynamicznego modelu i z drugiej strony
aspekt elastycznego korpusu sprawia błąd głowicy ważniejszym.
Prezentowana metoda analizy błędu zapewnia ważne informacje
dla analizy konfiguracji i przeprojektowania.
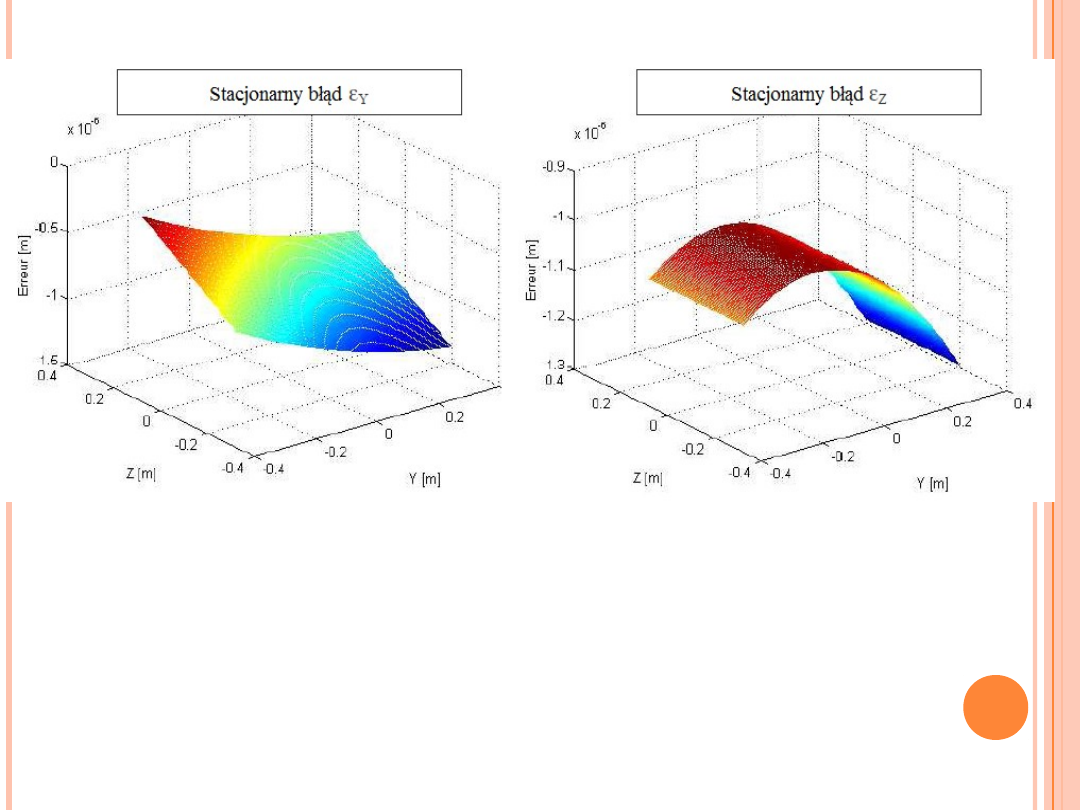
Rysunek 8. Mapowanie błędów e
Y
i e
z
związane ze współrzędnymi y
z
=10m/s
2
(HMC)
The tool tip error (e
x
e
y
e
z
) can be analysed more precisely by identifying the
contribution of both linear and angular elastic deformations and by tracking the
error propagation in the chain of joints between bodies, cf figure 9
6
. This error
propagation is obtained from the computing of the elastic displacement with
equations (5) and (15) such as:
Błąd głowicy może być analizowany bardziej precyzyjnie poprzez
identyfikację wkładu liniowych i kątowych elastycznych deformacji i przez
śledzenie szerzenia się wad pomiędzy łańcuchem połączeń pomiędzy
korpusami (rysunek 9). Poszerzanie się błędu jest pozyskiwane z obliczeń
elastycznych przemieszczeń których równania (5) i (15) wyglądają tak:
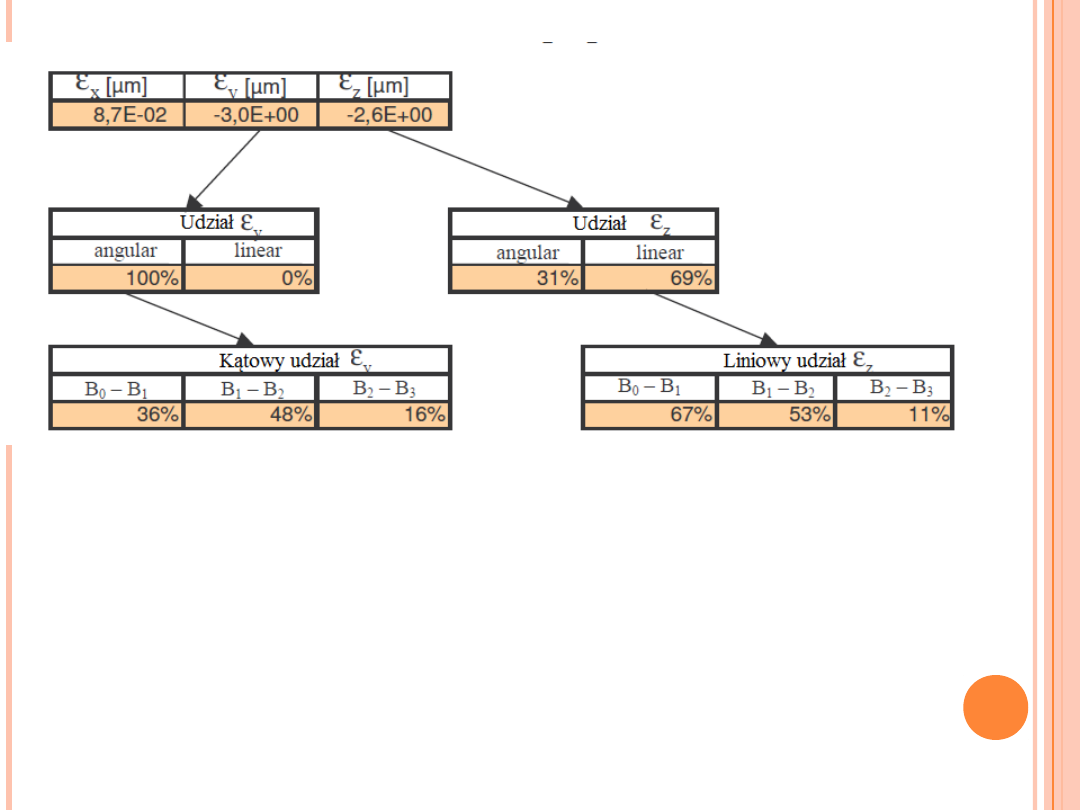
Rysunek 9. Analiza szerzenia się błędów wśród połączeń y
z
=10m/s
2
(HMC)

From the index to error propagation as shown in figure 9 the weak points of a
configuration can be identified and the corresponding part can be re-designed .
The following example is a vertical machining center (VMC) with a great
workspace and a gantry structure [8] . Table 1 presents the tool tip position error
assessment . It should be remarked that a great error occurs along Y axis for an
acceleration y
y
and errors are also due to dynamic coupling between axes (X and
Z, X and Y). The analysis of the error propagation similar to the presented one in
figure 9 led to identifying the cause of the tilting A re-design of the configuration
and the generation of a decoupling control law has been made in order to
minimize the dynamic coupling between axes by reducing as much as possible
the titling, cf. tab 2. Note that the configuration re-design produce also a better
distribution of the load in the structure.
Z indeksu do rozprzestrzeniania się błędów jak pokazano na rysunku 9 słabe punkty
konfiguracji, mogą być zidentyfikowane i odpowiednia część może być
przeprojektowana. Kolejny przykład jest pionowym centrum obróbczym (VMC) z
ogromną przestrzenią roboczą i bramową strukturą [8]. Tabela pierwsza przedstawia
ocenę błędu pozycji głowicy. Należy zauważyć, ze największy błąd znajduje się wzdłuż
osi Y dla przyspieszenia y
y
i występują również błędy spowodowane dynamicznym
łącznikiem między osiami (X i Z, X i Y). Analiza szerzenia się błędu podobna do
zaprezentowanej na rysunku 9 zezwala na zidentyfikowanie powodu przechylenia.
Przeprojektowanie konfiguracji oraz generacja reguł kontroli była stworzona aby
zminimalizować dynamiczne sprzężenie pomiędzy osiami przez jak największą
redukcję przechylenia (patrz tabela 2). Należy pamiętać, że przeprojektowanie
konfiguracji przynosi również lepszy rozkład obciążenia w strukturze.
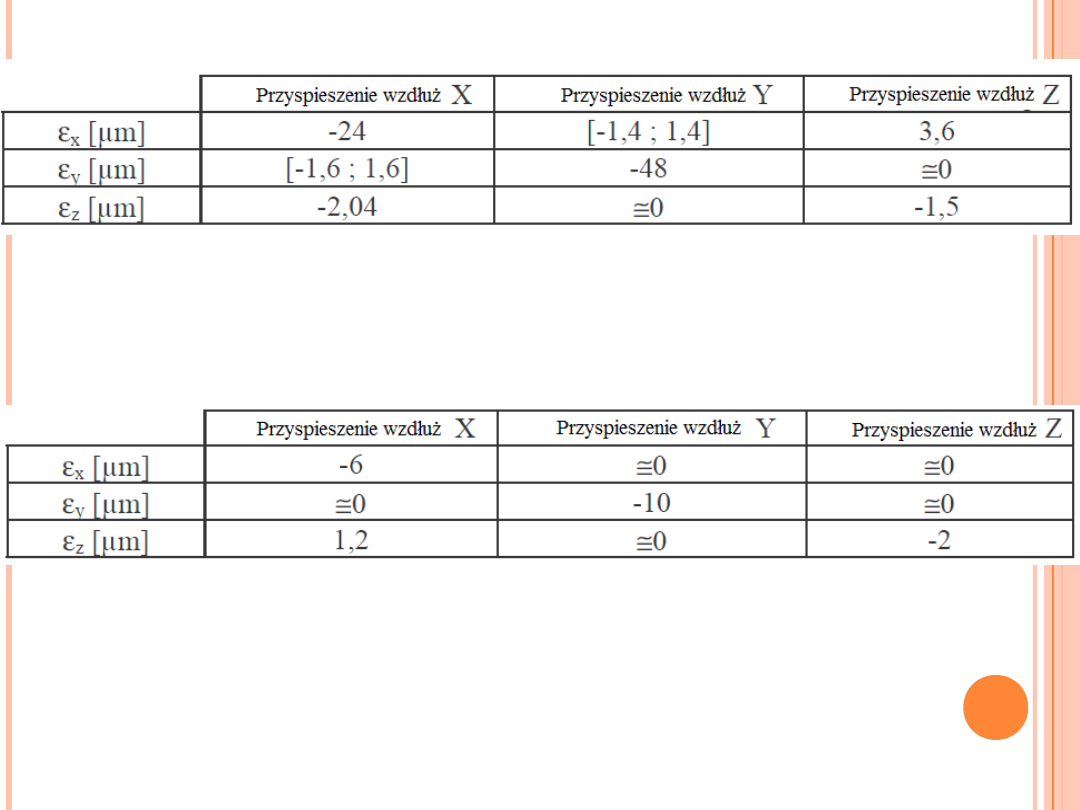
Tabela 1. Minimalne błędy wstępnej konfiguracji
Tabela 2. Maksymalne błędy konfiguracji po przeprojektowaniu

The aim of the paper was to address the issue of the dynamic criteria that can be
used during conceptual design of machines It is suggested to break down the design
into two levels, namely the first level focuses on the design of the component
configuration and the second on the embodiment design of each component via
classical tools of analysis and design. The approach proposed for the first level of
design is based on symbolic model involving rigid body and equivalent elasticjoint.
Celem pracy było rozwiązanie problemu dynamicznych kryteriów które mogą być
wykorzystane podczas koncepcjonalnego projektowania obrabiarek. Sugeruje rozbicie
projektowania na dwa etapy. Pierwszy etap skupia się na projektowaniu elementów
konfiguracji, a drugi na przedstawieniu każdego elementu projektowania poprzez
klasyczne narzędzia analizy i projektowania. Proponowane podejście dla pierwszego
etapu projektowania bazuje na symbolicznym modelu z udziałem sztywnego korpusu i
odpowiedniego elastycznego połączenia.

The paper depicted this approach in the area of the high speed machine tools For a
simple cartesian 3-axis machine, one can provide a great number of combinations of
configuration candidate solutions.To avoid a too wide and complex analysis of
candidate solutions, a symbolic model was developed which includes the design
variables that describe the guideway components configuration and the actuator force
location related to the bodies The dynamic criteria are related to the tool tip error that
occurs during the accelerated motion. The component configuration was connected to
the dynamic behaviour of machine owing to a key phenomenon of high speed
cartesian machine, that is the tilting of bodies occurring during the desired translation
motion. The analysis of the causes and the consequence of this provided an useful
insight to design a configuration. In order to minimize the tilting and consequently the
tool tip error, a method was presented to extract some guidelines from the symbolic
model. Moreover, the assessment method of the tool tip error illustrated how we can
create an aid to analyse and re-design the component configuration.
Praca przedstawia to podejście w obszarze wysokoobrotowych obrabiarek. Dla prostej
3-osiowej obrabiarki, może zapewnić dużą liczbę kombinacji konfiguracji możliwych
rozwiązań. Aby uniknąć zbyt szerokiej i złożonej analizy możliwych rozwiązań,
opracowanie modelu symbolicznego zawiera zmienne projektowe które opisują
konfiguracje elementów napedowych i lokalizacje sił napędu związane z korpusem.
Dynamiczne kryteria związane są z błędem głowicy które występują podczas
przyspieszania ruchu. Konfiguracja komponentów została skoncentrowana na
dynamicznym zachowaniu obrabiarki dzięki kluczowym zjawiskom kartezjańskiej
obrabiarki to jest przechylania korpusu występującego podczas translacji. Minimalizacja
odchylenia prowadzi do powstania błędu głowicy, a przedstawiona metoda jest esencją
wskazówek z symbolicznego modelu. Co więcej, przedstawiona ocena błędu głowicy
ilustruje to, jak możemy stworzyć i poddać analizie i przeprojektowaniu elementy
konfiguracji.

By way of conclusion, in order to formulate models and criteria dedicated to the
configuration design, a good level of abstraction had to be sought. It had to provide a
deep insight in major dynamic phenomena that occur in machines and how the
component interacts This approach was tested on mechatronic systems such as
servomechanism [17,181 and it will be tested on other mechanisms and machines in
the future.
Podsumowując, w celu sformuowania modeli i kryteriów dedykowanych projektowaniu
konfiguracji należy dostrzec etap pewnej abstrakcji. Powinien dostarczyć głęboki wgląd
w dynamiczne zjawiska występujące w obrabiarkach i to w jaki sposób współpracują
wszystkie elementy. To podejście było testowane na mechatronicznych systemach
takich jak serwomechanizmy [17,18] i będzie testowany na innych mechanizmach i
obrabiarkach w przyszłości
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
Wyszukiwarka
Podobne podstrony:
Infection dynamics on the Internet
Enochian Sermon on the Sacraments
GoTell it on the mountain
Interruption of the blood supply of femoral head an experimental study on the pathogenesis of Legg C
CAN on the AVR
Ogden T A new reading on the origins of object relations (2002)
On the Actuarial Gaze From Abu Grahib to 9 11
91 1301 1315 Stahl Eisen Werkstoffblatt (SEW) 220 Supplementary Information on the Most
Pancharatnam A Study on the Computer Aided Acoustic Analysis of an Auditorium (CATT)
Newell, Shanks On the Role of Recognition in Decision Making
BIBLIOGRAPHY I General Works on the Medieval Church
Chambers Kaye On The Prowl 2 Tiger By The Tail
On The Manipulation of Money and Credit
Dispute settlement understanding on the use of BOTO
Fly On The Wings Of Love
090219 3404 NUI FR 160 $3 9 million spent on the road to success in?ghanistan
31 411 423 Effect of EAF and ESR Technologies on the Yield of Alloying Elements
więcej podobnych podstron