
1
Analiza wpływu
regulatora na jakość
regulacji
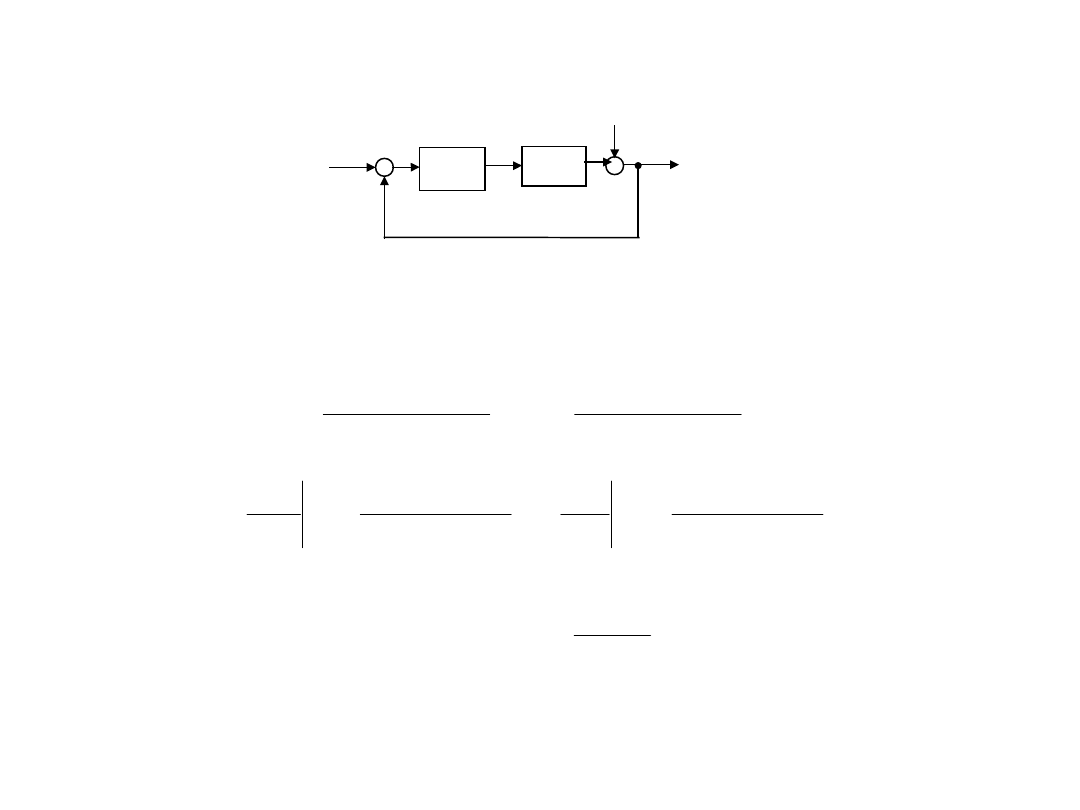
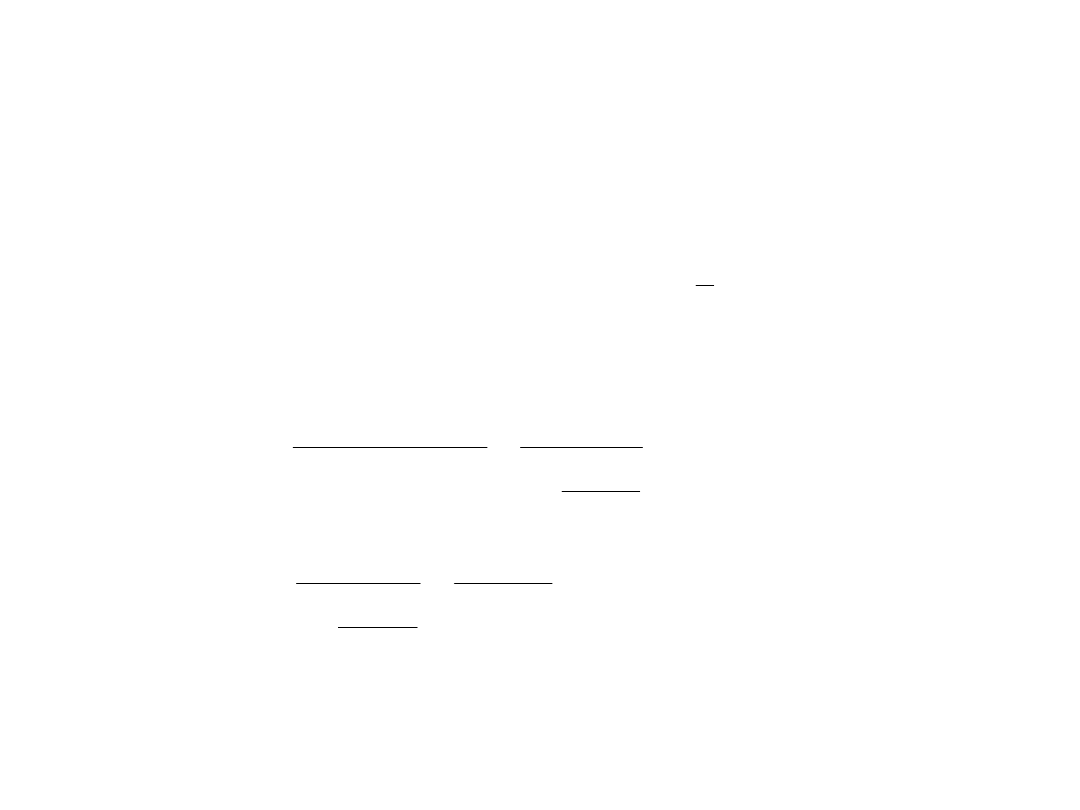
Układ regulacji z obiektem
statycznym
Wykład 18
2
_
+
W(s
)
U(s)
E(s
)
Y(s)
Regulato
r
Obiek
t
+
+
Z(s)
)
(
)
(
)
(
1
1
)
(
)
(
)
(
1
)
(
)
(
)
(
ob
ob
s
Z
s
G
s
G
s
W
s
G
s
G
s
G
s
G
s
Y
r
ob
r
r
(1)
)
(
)
(
1
1
)
(
)
(
)
(
)
(
1
)
(
)
(
)
(
)
(
ob
0
ob
0
s
G
s
G
s
Z
s
Y
s
G
s
G
s
G
s
G
s
W
s
Y
r
W
ob
r
r
Z
(2
)
)
(
)
(
)
(
)
(
)
(
s
Z
s
G
s
W
s
G
s
Y
z
w
(3
)
1
)
(
1
1
ob
s
T
k
s
G
(4
)
3
1
)
(
Ts
k
s
G
w
przy czym
1
1
1
1
1
1
1
1
1
k
k
T
T
k
k
k
k
k
k
k
k
p
p
p
p
1
1
1
1
T
k
k
T
s
p
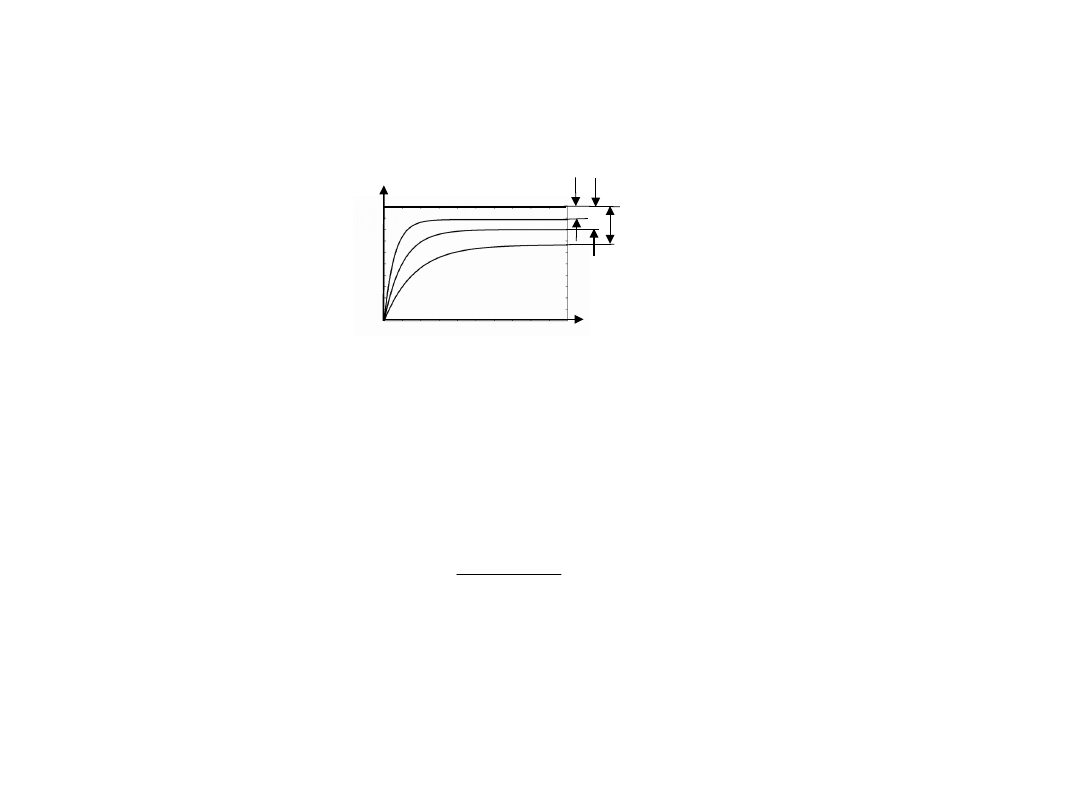
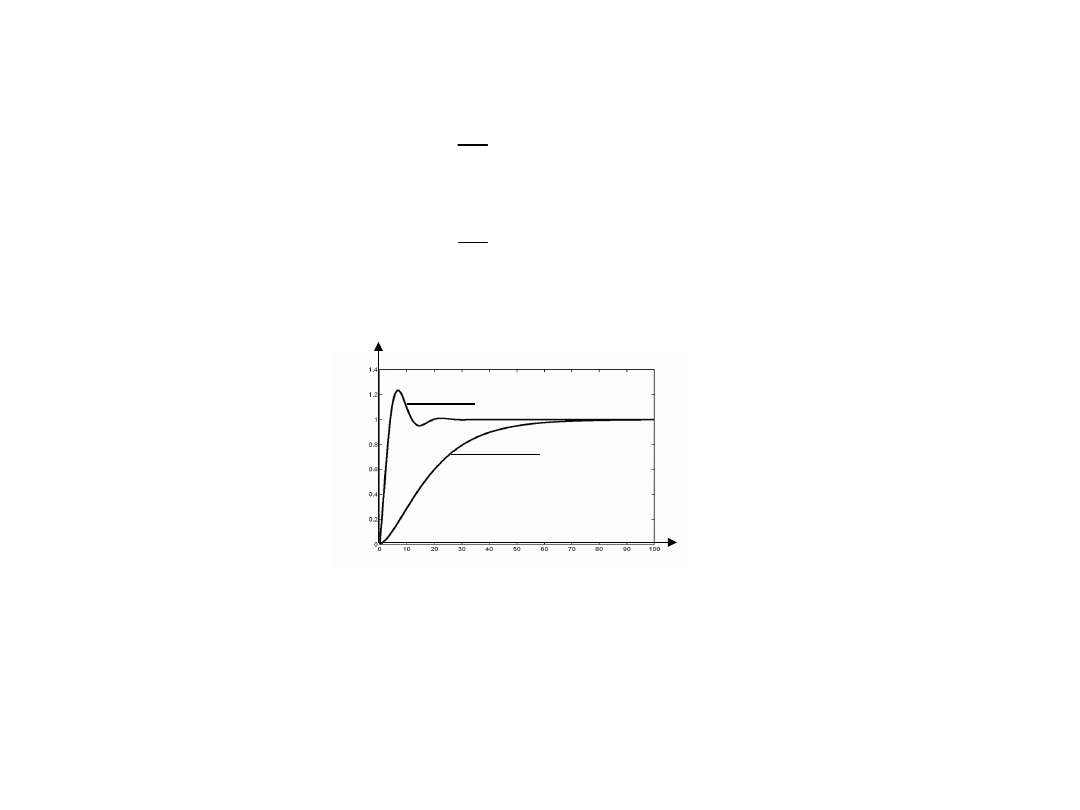
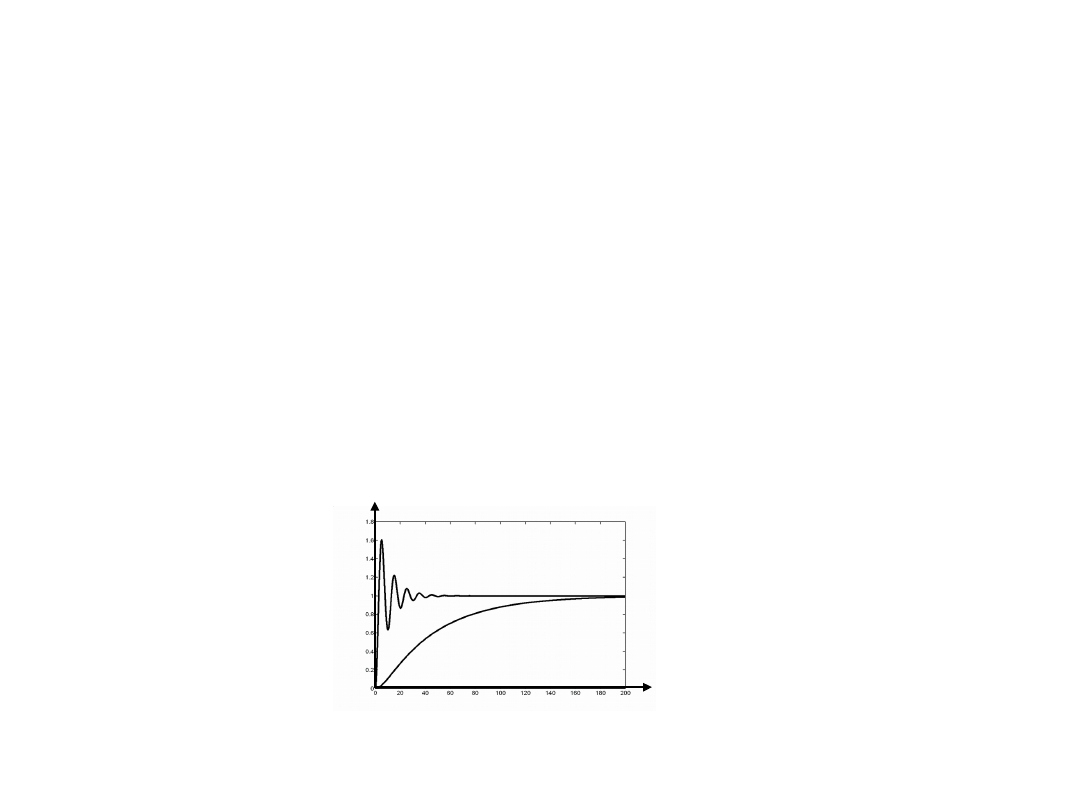
Wzrost wzmocnienia regulatora k
p
powoduje:
malenie stałej czasowej T układu regulacji, a to
oznacza skrócenie czasu regulacji (rysunek),
wzrost wzmocnienia k układu regulacji.
(5)
(6)
p
k
s
G
)
(
r
Regulator P
4
k
p1
k
p3
t
h
0
1
e
u
1
e
u2
e
u3
k
p2
k
p1
Pasmo przenoszenia układu otwartego.
1
)
(
)
(
)
(
1
1
ob
0
j
T
k
k
j
G
j
G
j
G
p
r
(7)
5
2
1
1
0
)
(
1
)
(
T
k
k
j
G
p
1
)
(
0
0
g
j
G
1
)
(
1
2
1
0
1
T
k
k
g
p
1
2
1
0
1
)
(
T
k
k
p
g
(8
)
(9
)
(10)
(11
)
6
Błąd ustalony po skokowej zmianie sygnału zadanego
)
(
lim
)
(
lim
0
s
sE
t
e
e
w
s
t
u
w
)
(
)
(
)
(
s
W
s
G
s
E
u
w
w
s
s
W
1
)
(
)
(
lim
0
s
G
e
wu
s
wu
1
1
1
)
(
)
(
1
1
)
(
1
1
ob
s
T
k
k
s
G
s
G
s
G
p
r
wu
1
1
1
0
1
1
1
1
1
lim
k
k
s
T
k
k
e
p
p
s
wu
(12
)
(13)
(14)
(15)
(16
)
7
1
1
1
1
)
(
T
j
k
k
k
k
j
G
p
p
w
2
1
2
2
1
1
)
1
(
)
(
T
k
k
k
k
j
G
p
p
w
1
)
(
j
G
w
gdy k
p
rośnie.
Transmitancja zakłóceniowa
1
1
1
1
1
1
1
1
1
1
)
(
k
k
s
T
s
T
s
T
k
k
s
G
p
p
z
(17)
(18)
(19)
8
1
1
)
1
(
1
)
(
1
1
1
1
s
k
k
T
k
k
s
T
s
G
p
p
z
1
1
1
T
k
k
s
p
Biegun transmitancji
identyczny z biegunem
transmitancji G
w
(s).
)
(
lim
)
(
lim
0
s
sE
t
e
e
z
s
z
t
zu
Błąd ustalony:
)
(
)
(
)
(
)
(
)
(
ob
s
Y
s
G
s
G
s
Z
s
E
r
z
)
(
)
(
s
Y
s
E
z
)
(
)
(
)
(
1
1
)
(
ob
s
Z
s
G
s
G
s
E
r
z
(20)
(21)
(22)
(23)
(24)
)
s
(
G
)
s
(
G
)
s
(
G
r
zu
ob
1
1
9
)
(
)
(
)
(
1
1
lim
ob
0
s
Z
s
G
s
G
s
e
r
s
zu
s
s
Z
1
)
(
)
(
)
(
1
1
lim
ob
0
s
G
s
G
e
r
s
zu
1
1
1
1
0
1
1
1
1
lim
k
k
k
k
s
T
s
T
e
p
p
s
zu
zu
wu
u
e
e
e
1
1
1
1
1
)
(
T
j
k
k
T
j
j
G
p
z
2
1
2
2
1
2
1
2
)
1
(
1
)
(
T
k
k
T
j
G
p
z
0
)
(
lim
j
G
z
k
p
(25)
(26)
(27)
(28)
(29)
10
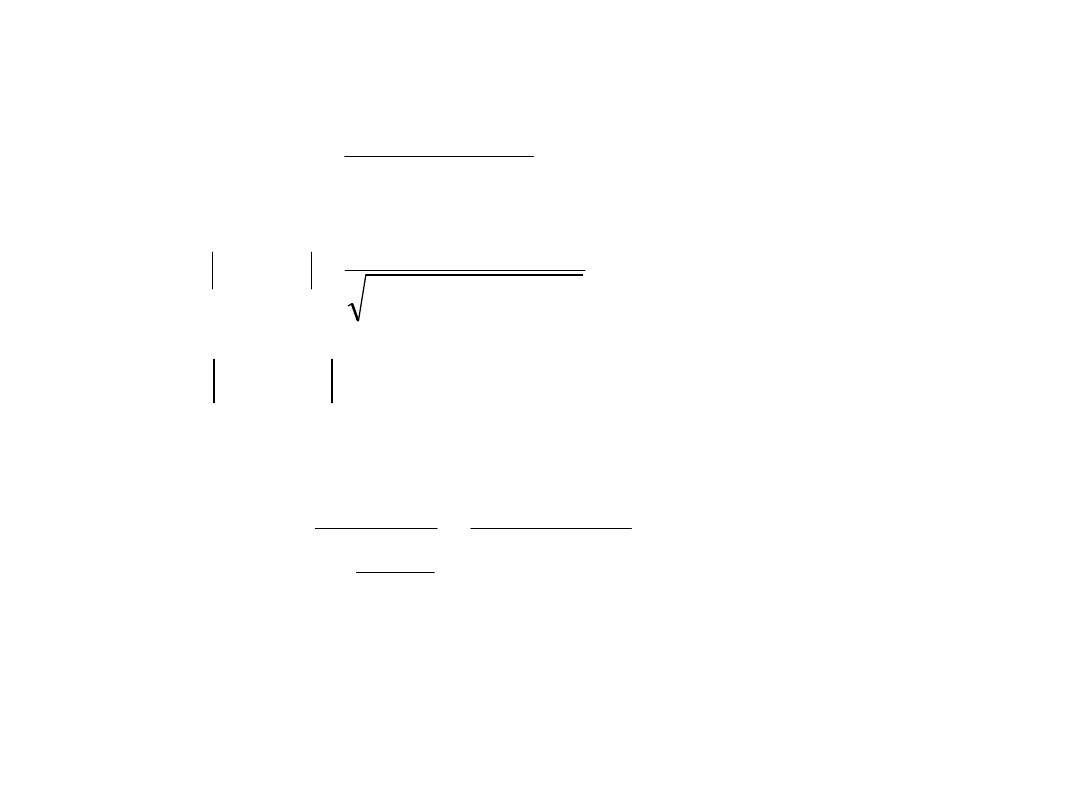
Regulator PI
1
1
2
1
1
1
1
1
1
1
)
1
(
1
1
1
1
1
1
1
)
(
k
k
s
T
k
k
s
T
T
k
k
s
T
k
k
s
T
k
s
T
k
s
T
k
s
T
k
s
G
p
i
p
i
p
i
p
i
p
i
p
w
1
1
2
1
2
1
1
1
)
1
(
1
1
1
1
1
)
(
k
k
s
T
k
k
s
T
T
s
T
s
T
T
s
T
k
s
T
k
s
G
p
i
p
i
i
i
i
p
z
(30)
(31)
Bieguny transmitancji
i
p
p
p
T
T
k
k
k
k
T
T
k
k
s
1
1
2
1
1
1
1
2
,
1
4
)
1
(
2
1
2
1
(32)
11
i
p
p
T
T
k
k
k
k
1
1
2
1
4
)
1
(
Bieguny
rzeczywiste
i
p
p
T
T
k
k
k
k
1
1
2
1
4
)
1
(
Bieguny zespolone
sprzężone
y
t
duże T
i
małe T
i
12
)
1
(
)
(
1
1
1
2
1
1
1
k
k
T
j
T
T
k
k
k
k
T
j
k
k
j
G
p
i
p
p
i
p
w
)
1
(
)
(
1
1
1
2
1
1
2
k
k
T
j
T
T
k
k
T
j
T
T
j
G
p
i
p
i
i
z
Transmitancje widmowe układu
Moduły transmitancji
widmowych
2
1
2
1
2
2
1
2
1
2
1
2
2
2
1
)
1
(
)
(
)
(
)
(
)
(
k
k
T
T
T
k
k
k
k
T
k
k
j
G
p
i
p
p
i
p
w
2
1
2
1
2
2
1
2
1
2
2
2
1
2
4
)
1
(
)
(
)
(
k
k
T
T
T
k
k
T
T
T
j
G
p
i
p
i
i
z
(33
)
(34
)
(35)
(36
)
13
M
o
d
u
ł
1
)
(
j
G
w
,
g
d
y
p
k
o
r
a
z
1
T
T
i
.
,
0
)
(
j
G
z
Mod
uł
k
p
gdy
Analiza transmitancji układu
otwartego
)
1
(
)
1
(
)
(
1
1
0
T
j
T
j
T
j
k
k
j
G
i
i
p
)
1
(
)
1
(
1
1
1
)
(
1
1
1
1
0
s
T
s
T
s
T
k
k
s
T
k
s
T
k
s
G
i
i
p
i
p
2
1
2
1
0
)
(
1
)
(
1
)
(
T
T
T
k
k
j
G
i
i
p
1
)
(
0
0
g
j
G
(37
)
14
2
1
2
1
4
1
2
2
1
2
1
2
1
0
)
(
)
(
4
]
1
)
[(
2
1
)
(
T
T
k
k
T
k
k
T
k
k
i
p
p
p
g
(38
)
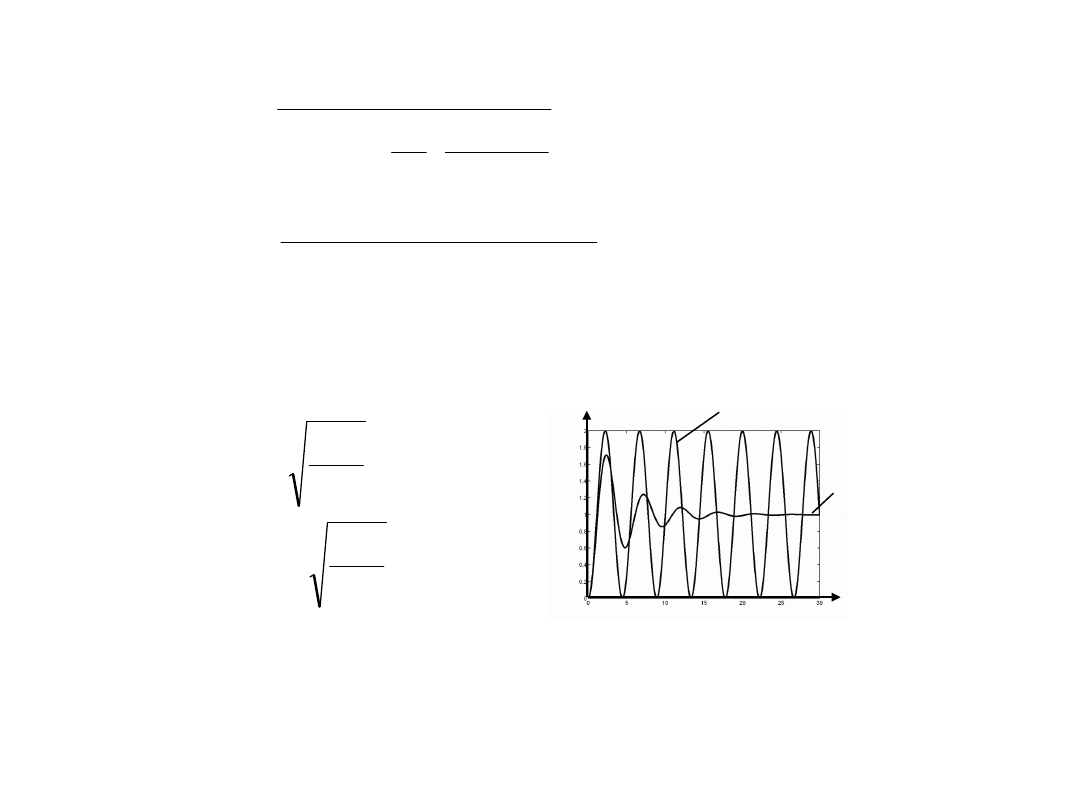
Wnioski wynikające ze wzoru (38) są nastepujące:
wzrost czasu zdwojenia T
i
regulatora zmniejsza pulsację graniczną układu
otwartego (zawęża pasmo regulacji), co oznacza, że procesy regulacji zachodzące
w układzie zamkniętym przebiegają wolniej w porównaniu z przebiegami
dla
małych wartości T
i
i mają charakter aperiodyczny (czas regulacji wydłuża się –
zobacz rysunek na slajdzie 11).
wzrost wzmocnienia k
p
regulatora zwiększa pulsację graniczną układu, a to
oznacza szybsze przebiegi regulacji, czyli skrócenie czasu regulacji.
Pamiętając o tym, że regulator PI wprowadza ujemne przesunięcie fazowe, a
moduł jego transmitancji widmowej maleje ze wzrostem pulsacji, wnioskujemy, iż
w ogólnym przypadku zapewnia on dobrą jakość regulacji tylko przy zakłóceniach
o małych częstotliwościach.
15
Błąd ustalony po skokowej zmianie
w(t) i z(t)
)
(
lim
)
(
lim
0
0
s
G
s
G
e
e
e
zu
s
wu
s
zu
wu
u
1
1
1
1
1
)
(
)
(
1
1
)
(
)
(
1
1
ob
s
T
k
s
T
k
s
G
s
G
s
G
s
G
i
p
r
zu
wu
0
1
1
1
1
1
lim
1
1
1
1
1
lim
1
1
0
1
1
0
s
T
k
s
T
k
s
T
k
s
T
k
e
i
p
s
i
p
s
u

16
Układ regulacji z obiektem
astatycznym
Wykład 19
)
(
)
(
1
1
ob
s
T
s
k
s
G
17
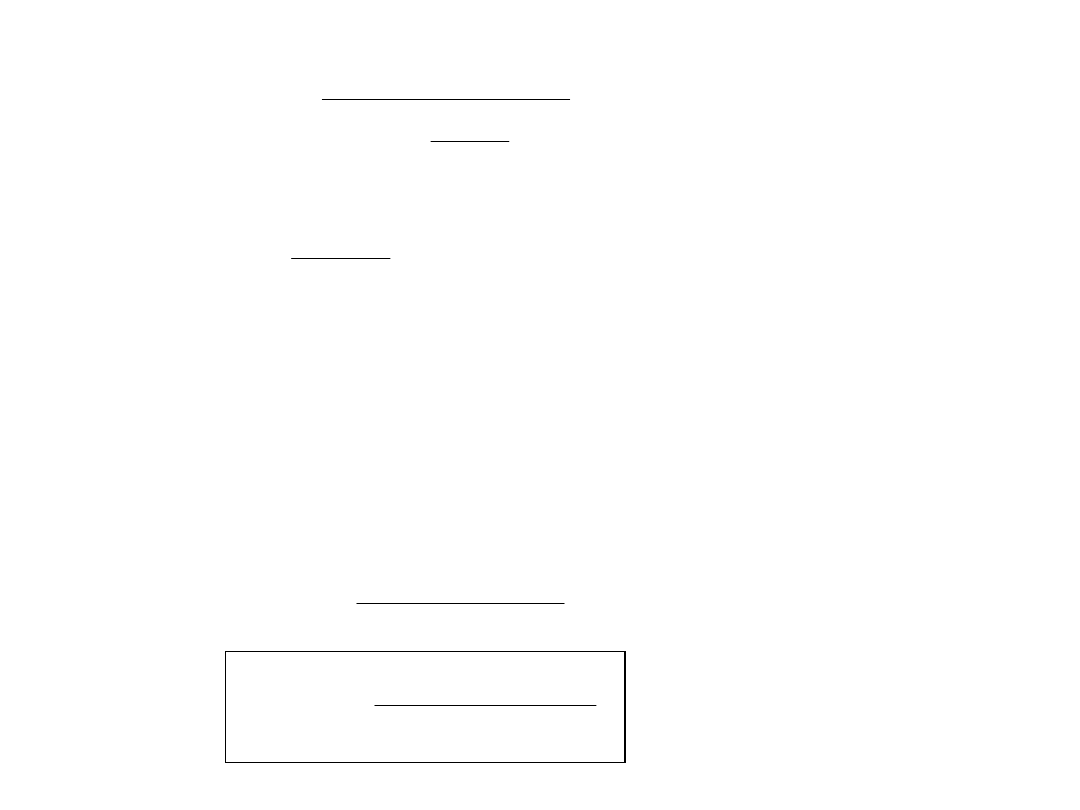
Układ z regulatorem typu P
1
2
1
1
1
1
1
1
1
1
1
)
1
(
)
1
(
1
)
1
(
)
(
k
k
s
s
T
k
k
k
k
s
T
s
k
k
s
T
s
k
k
s
T
s
k
k
s
G
p
p
p
p
p
p
w
1
2
1
2
1
1
1
)
1
(
1
1
)
(
k
k
s
s
T
s
s
T
s
T
s
k
k
s
G
p
p
z
Bieguny obu transmitancji są identyczne i określone wzorami
,
4
1
2
1
2
1
1
1
1
1
1
k
k
T
T
T
s
p
1
1
1
1
2
4
1
2
1
2
1
k
k
T
T
T
s
p
18
1
4
1
1
k
k
T
p
Dla wzmocnienia k
p
spełniającego
nierówność
bieguny transmitancji są liczbami rzeczywistymi ujem-
nymi.
Dla wzmocnienia k
p
spełniającego
nierówność
1
4
1
1
k
k
T
p
bieguny transmitancji są liczbami zespolonymi sprzężo-
nymi i znajdują się w lewej półpłaszczyźnie zmiennej ze-
spolonej s.
h
t
19
j
T
k
k
k
k
j
G
p
p
w
2
1
1
1
)
(
Transmitancje widmowe układu mają
postać
j
T
k
k
j
T
j
G
p
z
2
1
1
2
1
)
(
Moduły transmitancji
widmowych
2
2
2
1
1
1
)
(
)
(
T
k
k
k
k
j
G
p
p
w
2
2
2
1
1
2
2
2
1
)
(
)
(
)
(
T
k
k
T
j
G
p
z
20
,
p
k
Gdy
to
.
0
)
(
,
1
)
(
j
G
j
G
z
w
Z
równości
1
)
(
g
w
j
G
wynika
1
2
1
1
1
1
T
k
k
T
p
g
Błąd ustalony
)
(
lim
)
(
lim
0
0
s
G
s
G
e
e
e
zu
s
wu
s
zu
wu
u
Transmitancje uchybowe są określone
wzorem
)
1
(
1
1
)
(
)
(
1
1
)
(
)
(
1
1
ob
s
T
s
k
k
s
G
s
G
s
G
s
G
p
r
zu
wu
21
czyli
0
)
1
(
1
1
lim
)
1
(
1
1
lim
1
1
0
1
1
0
s
T
s
k
k
s
T
s
k
k
e
p
s
p
s
u
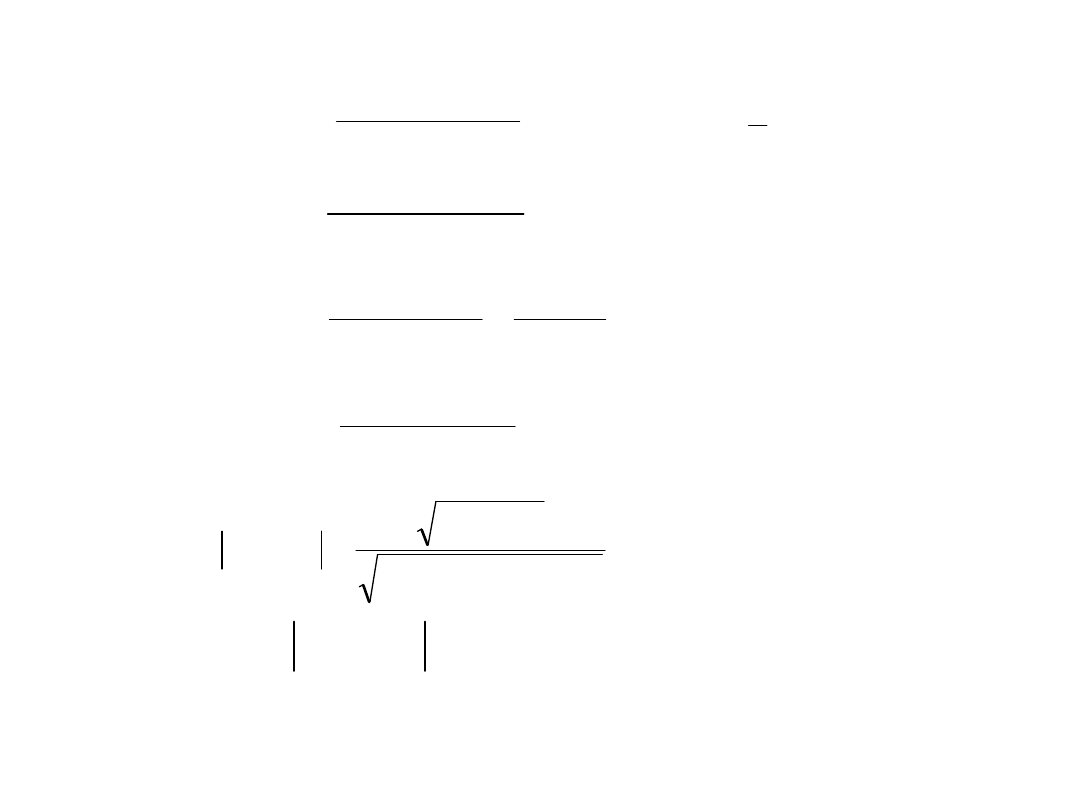
Układ z regulatorem typu PI
1
1
2
3
1
1
1
1
1
2
1
1
1
1
1
)
1
(
)
1
(
)
1
(
)
1
(
1
1
1
)
1
(
1
1
)
(
k
k
s
T
k
k
s
T
s
T
T
k
k
s
T
k
k
s
T
k
k
s
T
s
T
s
T
k
k
s
T
s
k
s
T
k
s
T
s
k
s
T
k
s
G
p
i
p
i
i
p
i
p
i
p
i
i
p
i
p
i
p
w
22
1
1
2
3
1
2
3
1
1
1
)
1
(
1
1
1
1
)
(
k
k
s
T
k
k
s
T
s
T
T
s
T
s
T
T
s
T
s
k
s
T
k
s
G
p
i
p
i
i
i
i
i
p
z
Dla
1
T
T
i
bieguny transmitancji są określone
wzorami
i
p
i
p
T
k
k
j
s
T
k
k
j
s
1
2
1
1
T
i
=T
1
T
i
>T
1
t
23
Transmitancja widmowa
)
(
)
(
2
1
1
2
1
1
1
T
k
k
jT
T
k
k
T
k
jk
k
k
j
G
p
i
i
p
i
p
p
w
Moduł transmitancji
widmowej
2
1
1
2
2
2
2
1
2
2
1
2
1
)
(
)
(
)
(
)
(
)
(
T
k
k
T
T
k
k
k
k
k
k
j
G
p
i
i
p
p
p
w
Parametry regulatora należy tak
dobrać aby
1
)
(
j
G
w
Zatem
2
2
1
1
2
2
2
2
1
2
2
2
1
2
1
)
(
)
(
)
(
)
(
T
k
k
T
T
k
k
T
k
k
k
k
p
i
i
p
i
p
p
6
1
4
1
2
2
2
2
2
2
2
)
2
(
]
2
)
[(
T
T
T
kT
T
kT
kT
T
k
i
i
i
i
i
i
gdzie k = k
1
k
p
.
24
0
2
)
(
2
i
i
kT
kT
0
2
1
2
2
T
kT
T
i
i
1
1
1
2
1
2
1
T
k
k
T
k
p
1
4T
T
i
Reguły Zieglera-Nicholsa
dla regulatora PID
kr
kr
kr
12
,
0
5
,
0
6
,
0
T
T
T
T
k
k
d
i
p
p
dla regulatora PI
kr
kr
85
,
0
45
,
0
T
T
k
k
i
p
p
dla regulatora P
kr
5
,
0
p
p
k
k
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
Wyszukiwarka
Podobne podstrony:
FESTO Podstawy automatyzacji
Automatyka (wyk 3i4) Przel zawory reg
Automatyzacja w KiC (w 2) Obiekty reg
AutomatykaII 18
Automatyka wykład 8
Wybrane elementy automatyki instalacyjnej
12 Podstawy automatyki Układy sterowania logicznego
Automatyka dynamiakPAOo 2
Automatyka okrętowa – praca kontrolna 2
automatyczne swiatla
podstawy automatyki ćwiczenia lista nr 4b
AUTOMATYZACJA PROCESÓW SPAWALNICZYCH
Podstawy automatyki cz1
automatyka i robotyka 12 12 1
Automat do ład akumulatorów
Automatyka i sterowanie, Pomiary w energetyce
Przeglad oferty Micro Automation Sets
więcej podobnych podstron