
FILTRY ADAPTACYJNE
Są to filtry cyfrowe posiadające zdolność do automatycznego doboru swoich
parametrów w oparciu o minimalizację pewnego sygnału błędu (np. różnicy
pomiędzy pożądanym a rzeczywistym sygnałem wyjściowym) - ich
charakterystyki są zmienne w czasie.
Podstawowe parametry algorytmów adaptacyjnych:
1. Współczynnik konwergencji – określa ilość iteracji po których
parametry są wyliczone „wystarczająco dokładnie”
2. Błąd końcowy – uśredniona wartość końcowego błędu średnio-
kwadratowego
3. Zdolność śledzenia – zmiana parametrów filtru w wyniku zmiany
sygnału wejściowego (lub fluktuacji algorytmu).
4. Odporność – zdolność do poprawnego działania w przypadku zakłócenia
sygnału
5. Wymagania obliczeniowe – ilość operacji arytmetycznych, rozmiar
pamięci itp.
6. Struktura – modułowość, równoległość (możliwość implementacji
sprzętowej)
7. Własności numeryczne – błędy kwanyzacji, stabilność, wymagana
dokładność obliczeniowa
Metody adaptacji dla filtrów Wienera (sygnały stacjonarne) – minimalizacja
błędu.
1. Metoda największego spadku (LMS) – prosta, powolna konwergencja,
wrażliwy na zakłócenia, powolne śledzenie
2. Metoda gradientowa kratowa (GAL) – modułowa, wykorzystuje filtr w
postaci kratowej
Metody adaptacji dla filtrów Kalmana (sygnały niestacjonarne)– układ opisany
jest przez wektor stanu i wektor błędów pomiarowych – modyfikacja
parametrów odbywa się na drodze rekursywnej lub blokowo
1. rekursywna metoda najmniejszych kwadratów (RLS)
2. rekursywna metoda najmniejszych kwadratów z dekompozycją QR (QR-
RLS)
3. algorytmy szybkie
a. szybki filtr transwersalny (FTF)
b. rekursywny najmniejszych kwadratów – kratowy (RLSL)
c. najmniejszych kwadratów z dekompozycją QR – kratowy (QR-
LSL)
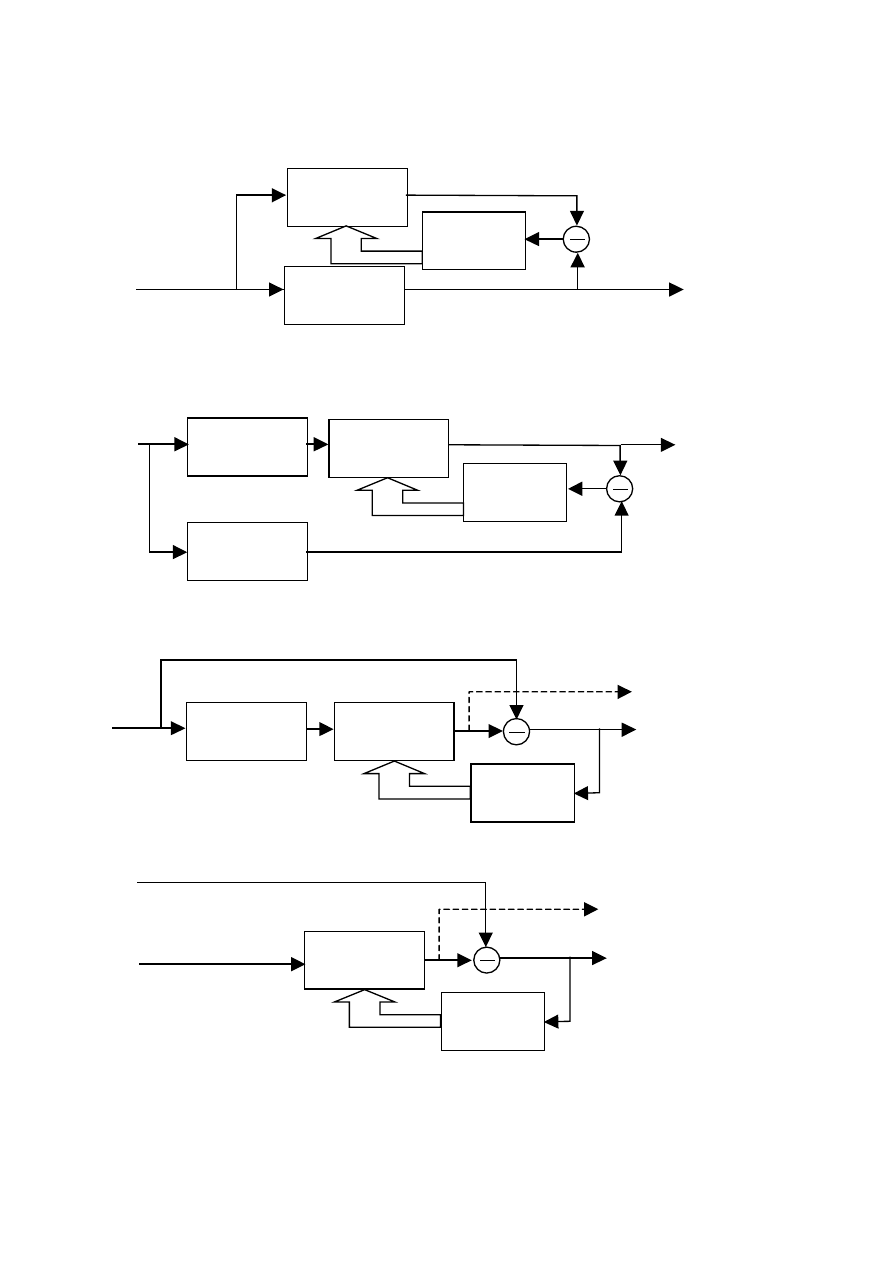
PODSTAWOWE KLASY UKŁADÓW ADAPTACYJNYCH
filtr
cyfrowy
algorytm
adaptacji
obiekt
współczynniki
błąd
wyjście
wejście
filtr
cyfrowy
obiekt
algorytm
adaptacji
współczynniki
opóźnienie
wyjście
błąd
wejście
opóźnienie
filtr
cyfrowy
algorytm
adaptacji
współczynniki
wejście
sygnał predykowany
sygnał błędu
filtr
cyfrowy
algorytm
adaptacji
współczynniki
sygnał błędu
sygnał odniesienia
sygnał zakłócony
IDENTYFIKACJA OBIEKTU
IDENTYFIKACJA OBIEKTU -ODWROTNA
PREDYKCJA
ELIMINACJA ZAKŁÓCEŃ
sygnał zrekonstruowany
Wyszukiwarka
Podobne podstrony:
Wykład 6 3 PODSTAWOWE układy adaptacyjne simulink
Wykład 4 Podstawy prawne finansów publicznych
Wykład VIII Synteza układów sekwencyjnych
Idea holizmu - wykład 2, podstawy pielęgniarstwa
wykłady z podstaw ekonomii
Konspekt wykładów z Podstaw automatyki wykład 5
Zagadnienia egzaminacyjne PF3-09, SKRYPTY, NOTATKI, WYKŁADY, Podstawy Fizyki 3, wykład
konspekt - swiat rzeczywisty i wyobrazony 4a, konspekty - szkoła podstawowa, klasy 4,5,6, konspekty
1 wykład Podstawowe pojęcia i przedmiot ekonomi
Wykład 1 - Podstawy organizacji, zarządzanie bhp
Wykład -Podstawy turystyki, Turystyka i Rekreacja, Podstawy turystyki
ZFP wykład 4, podstawy finansów przedsiębiorstwa
Projektowanie baz danych Wykłady Sem 5, pbd 2006.01.07 wykład03, Podstawy projektowania
wykład 3 - podstawy zarządzania - 10.01.2010
wykłady, Podstawy kinezjologi, Podstawy kinezjologi
Wykład 7 PODSTAWOWE ELEMENTY ORGANIZOWANIA
więcej podobnych podstron