Geometric Algebra and Computer Vision
The Auto-calibration Problem
Chris Doran
Department of Physics
Madingley Road, Cambridge
C.Doran@mrao.cam.ac.uk
www.mrao.cam.ac.uk/
clifford/
SUMMARY
1.
Rotors, bivectors and rotations.
Ways of representing
rotations and the group manifold.
2.
Extrapolating rotors and rotor calculus.
The linear space
associated with rotors, extrapolating and averaging
rotations.
3.
The known range data problem.
Least squares, its
Bayesian origin and solution for 2 and
cameras.
4.
Unknown range data problem.
Bayesian analysis again
and its geometric solution. 2 camera data and the
-camera problem.
1
G
EOMETRIC
A
LGEBRA IN
3-
D
1 scalar
3 vectors
3 bivectors
1 trivector
NB
for the pseudoscalar. Geometric product has
Æ
Dot and wedge symbols have usual meaning
A
rotor
is a normalised element of the even subalgebra,
The tilde is the
reverse
operation. Rotors generate rotations
via
¼
We can also write
¾
R generates a rotation of
in a positive (right handed)
sense in the
plane. In 3-d we can also write
¾
where
is the unit vector representing the axis.
2
T
HE
G
ROUP
M
ANIFOLD
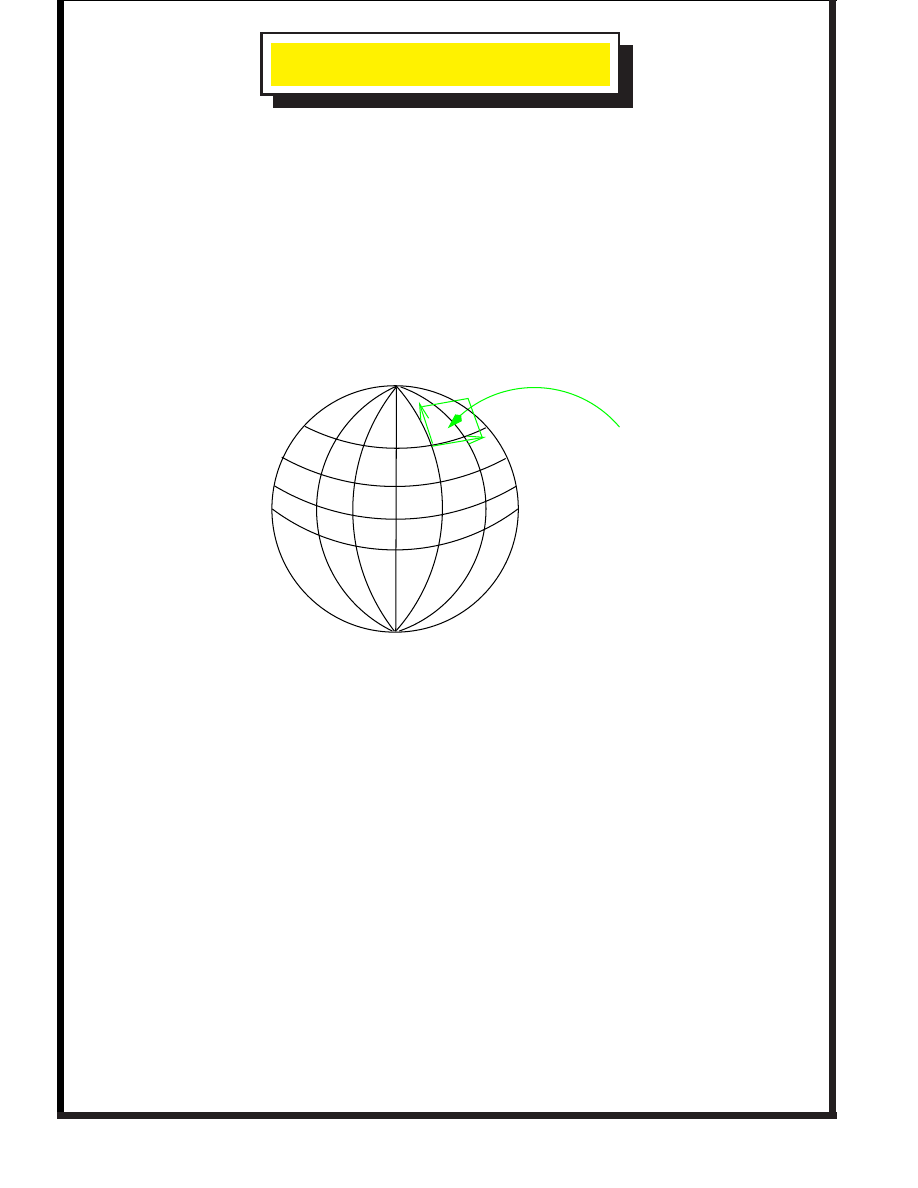
Rotors are elements of a 4-d space, normalised to 1. They lie
on a
3-sphere
. This is the
group manifold
. Any paths between
rotors must lie on this manifold.
At any point on the manifold, the
tangent space
is
3-dimensional. Just like the 2-sphere in 3-d:
Tangent plane
Rotors require 3 parameters, eg. Euler angles
½
¾
¾
¾
¿
¾
½
¾
¾
But often more convenient to use the set of bivector
generators
with
Small Complication:
The rotors
and
generate the
same
rotation. The
rotation
group manifold is more
complicated — it is a
projective 3-sphere
with
and
identified. Usually easier to work with rotors.
3
E
XTRAPOLATING
B
ETWEEN
R
OTATIONS
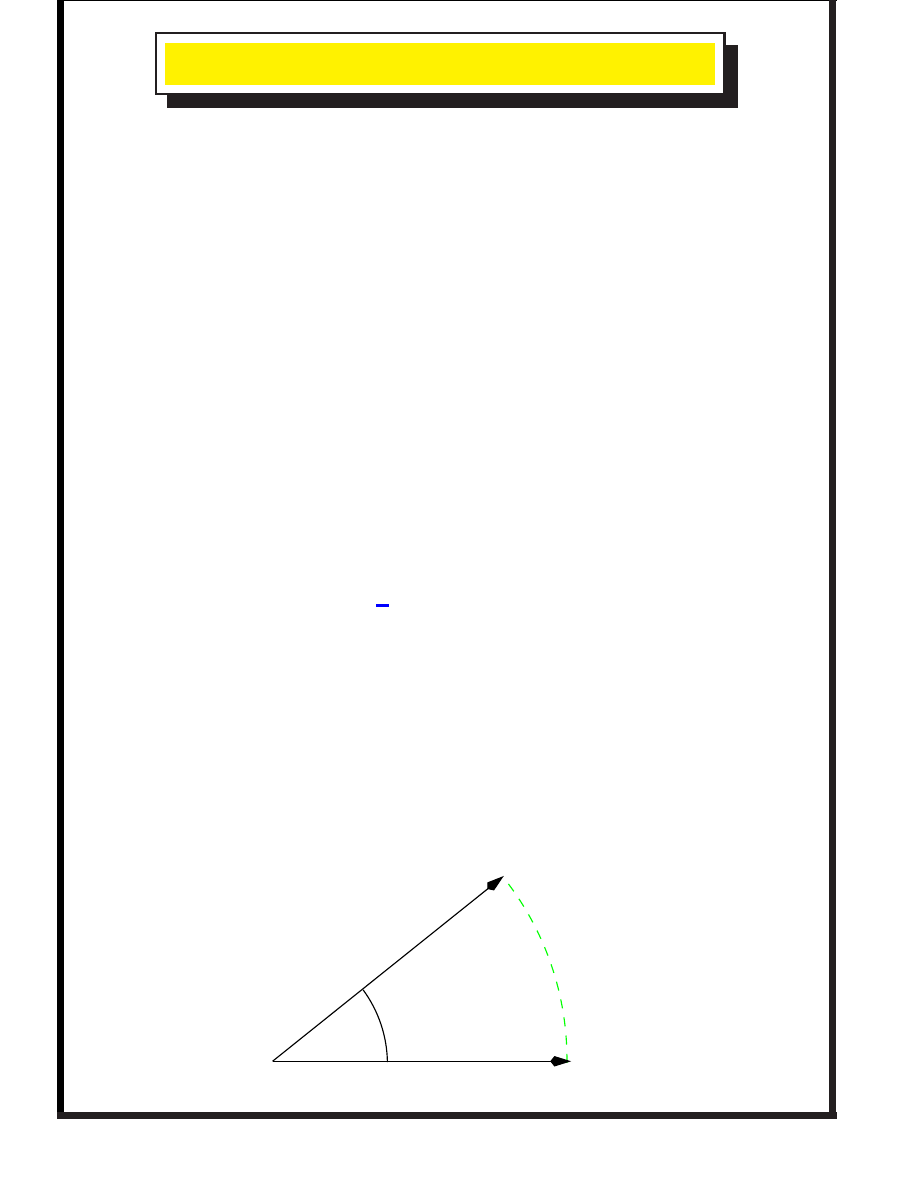
Given two estimates of a rotation,
and
, how do we find
the
mid-point
? With rotors this is
remarkably easy
! Make sure
they have smallest 4-d angle on 3-sphere. Path between them
is
so find
from
This path is
invariant
. If both endpoints are transformed, the
path transforms in the same way. The midpoint is
¾
This is
general
— works for any Lie group. For rotations in 3-d
can do even better.
and
can be viewed as two unit
vectors in 4-d. The above construction gives the path in the
plane specified by these vectors
4
The rotor path can therefore be written as (simple trig’)
and the midpoint rotor is simply
Gives a very simple prescription for finding the midpoint:
Add the rotors and normalise the result
Extremely simple! Compare with the equivalent matrix —
quadratic in
, so the expression is a mess.
These formulae are very useful in
dynamics
.
Averaging Rotations
Suppose now that we had a number of estimates for a rotation
and wanted to take the average. Again the answer is simple —
add up all of the rotors and normalise
(taking care to make
sure they are all in the ‘closest’ configuration). Useful in
computer vision
.
Lesson
Can simplify problems with rotations by relaxing the
normalisation criteria for rotors and working in the 4-d
linear
space. This provides us with one further additional tool:
5
R
OTOR
C
ALCULUS
Can view a function of a rotation as taking values over the
group manifold
. Calculus in these cases is possible, but a bit
messy. (Often resort to Euler angles.)
Now have a more elegant and simpler alternative: relax the
normalisation constraint and replace
by
— a
general
element of the even subalgebra. Start with simple result
where
contains only even-grade terms. Trick now is to write
Typical application is on scalar
where
projects onto scalar part. Now have
where overdot denotes scope.
6
Need a formula for the inverse term. Use
Can now complete derivation
Convenient to premultiply by
Note the
geometric product
. The result is a bivector — a
3-parameter space, as expected.
This simple derivation turns out to be very useful in a range of
applications.
7
C
OMPUTER
V
ISION
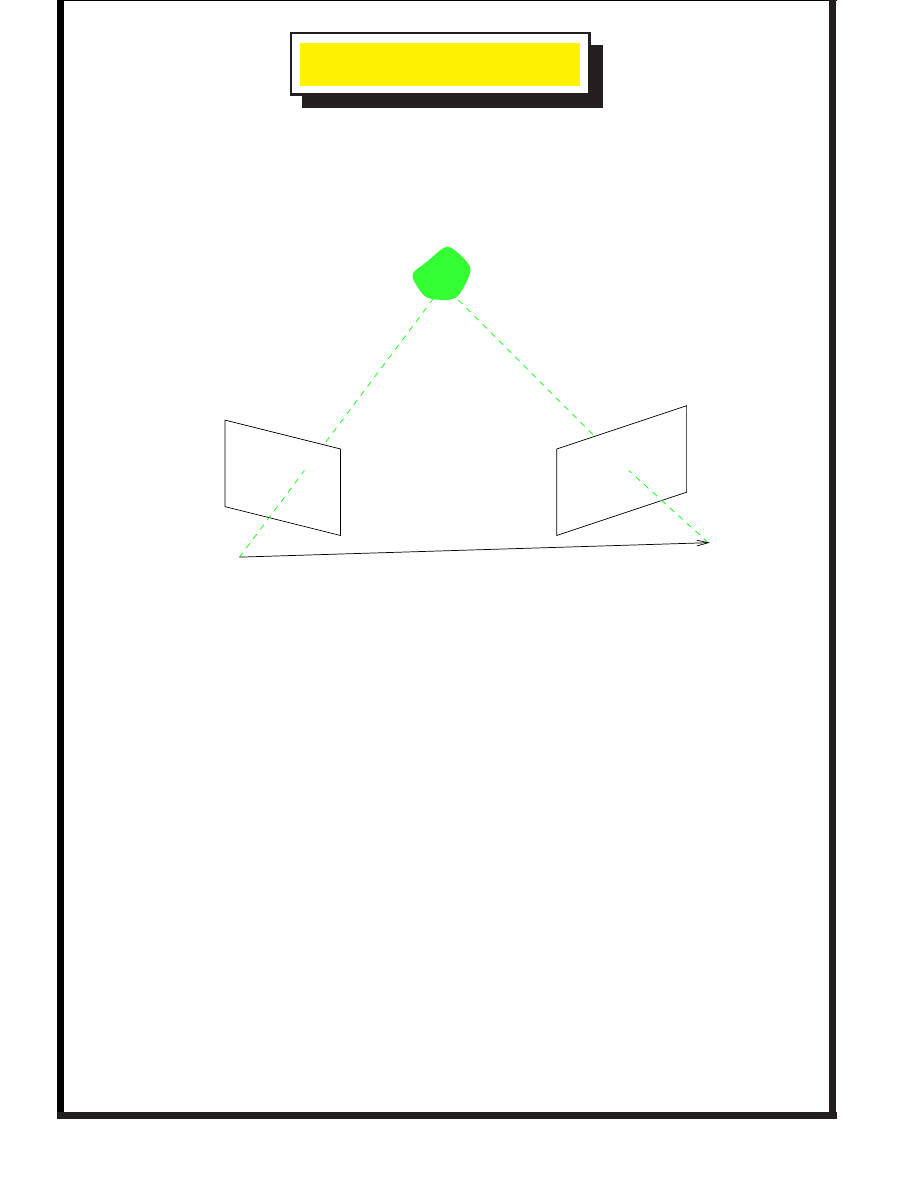
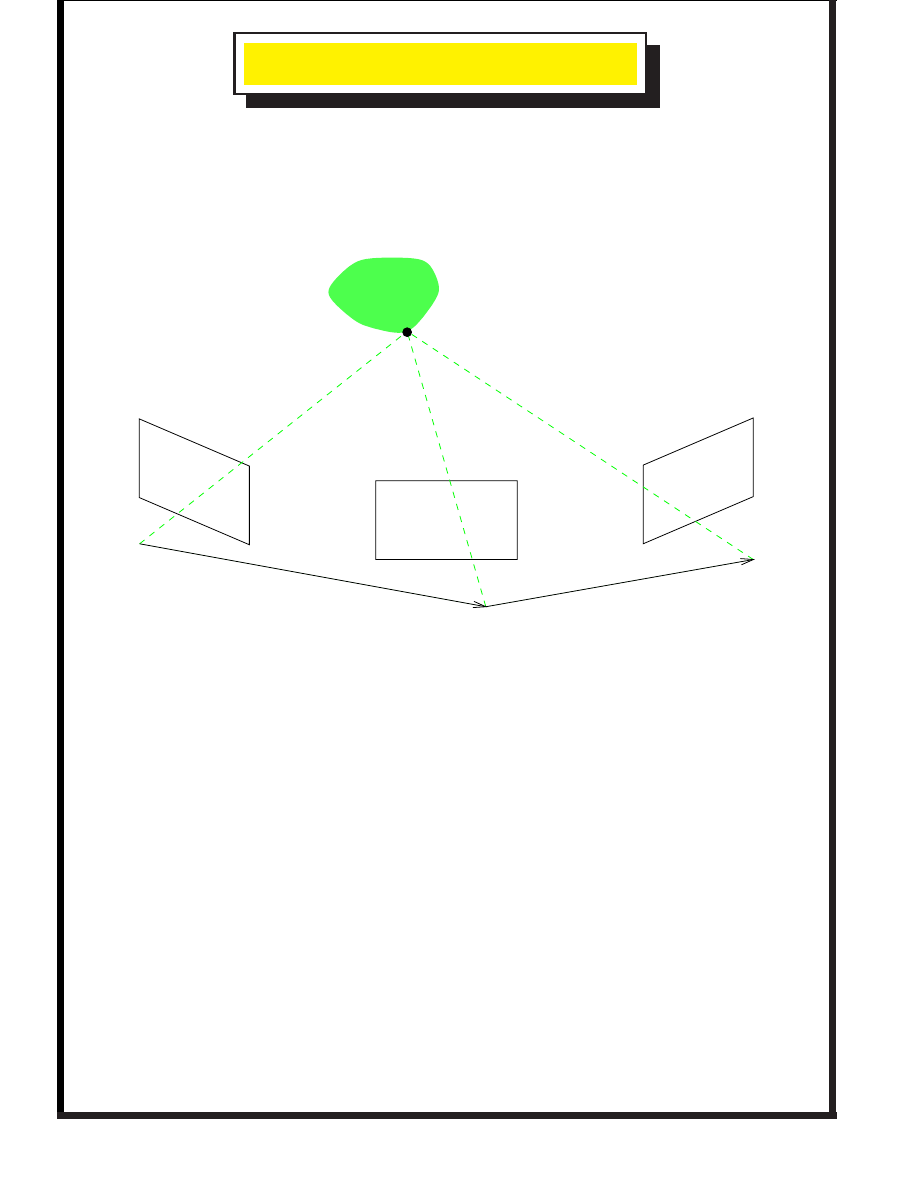
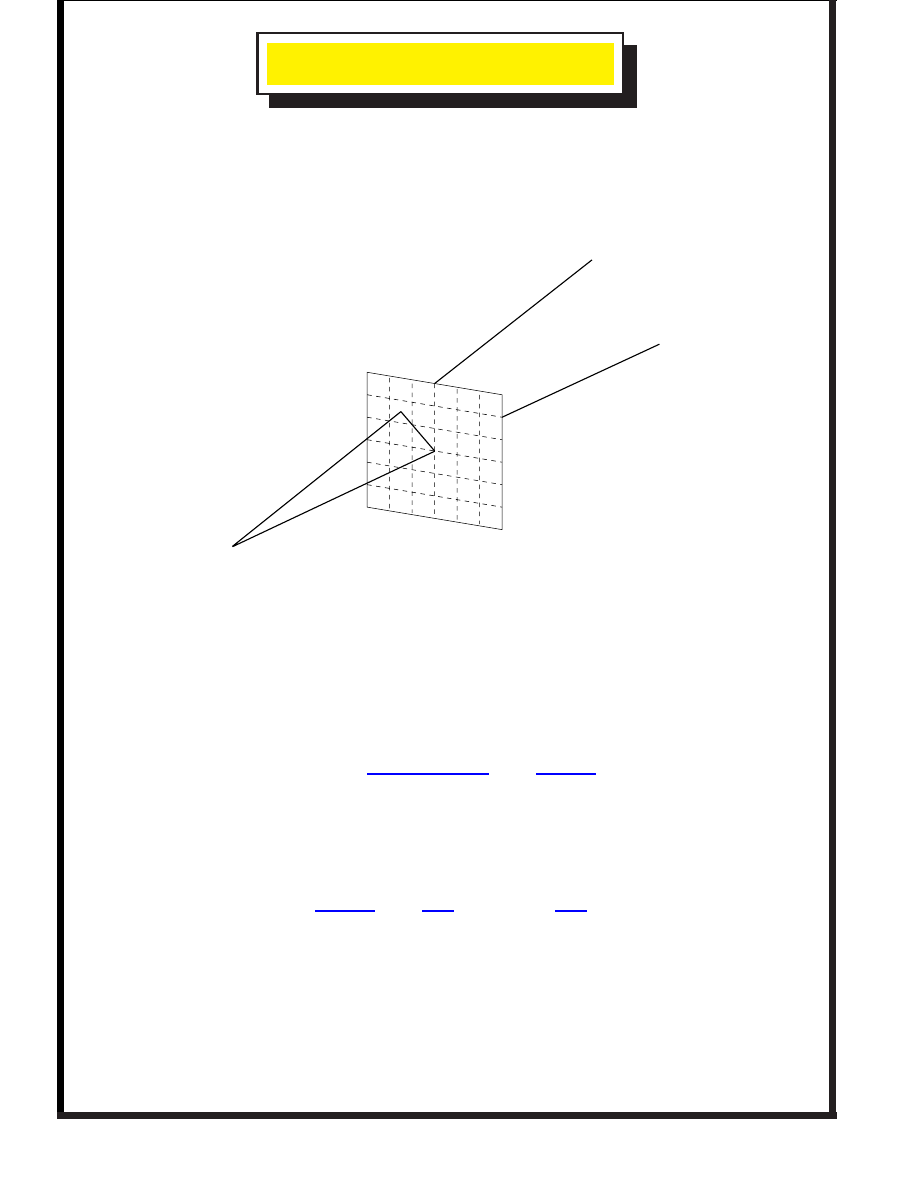
Basic problem of interest is the
auto-calibration problem
.
Suppose we have different camera views of the same scene.
Camera 1
Camera 2
Object
Given point matches (+ noise) can we figure out the relative
translation and rotation between the cameras (to calibrate).
Then use the calibrated cameras to reconstruct a 3-d scene.
Applications
1.
Gait analysis
— running etc.
2.
Motion analysis
— sports analysis and RSI in musicians
3.
Reaching and Neurogeometry
.
4.
3-d Reconstruction
eg. using a single moving camera
attached to a robot arm.
Two distinct problems to study.
8
K
NOWN
R
ANGE
D
ATA
Suppose we know the full 3-d positions of each point match
(not very likely in practice). Have coordinates
and
relative to first and second camera. With
the first camera
frame, define
¼
and have
Should have
¼
Want best fit
and
with various point matches. Minimise
least squares error
¼
There is a
Bayesian derivation
of this result. Start with
Gaussian distribution for the coordinates
(bar for ‘true’ position).
Marginalise
over actual positions to get
likelihood function in terms of data,
and
. Always useful to
see how expressions arise from a simple probabilistic
argument.
9
Solution
Differentiating
wrt
and
is straightforward
¼
so best fit,
, given by
¼
ie difference in centroids. For
derivative write
¼
¼
so just need
¼
¼
Substitute solution for
, get simply
where
¼
Easily solved with an
SVD
of
. Computationally
very
efficient
. A useful check on any reconstruction.
10
E
XTENSION TO
CAMERAS
Get the general idea by considering 3 cameras. Express
everything in a
global
frame.
Camera 1
Camera 2
Camera 3
¼
¼
¼
Object
We could minimise
but this is not symmetric. Instead consider each pair in turn
with a
separate rotor
for each pair.
The rotors and translations should be consistent.
11
Impose
constraints
Can proceed as above for the translations. Find that
,
and
are still difference of centroids. The constraint is
automatically satisfied.
To find centroids we still need the rotors. Enforce rotor
constraint with a
Lagrange Multiplier
of form
must be a
multivector
Lagrange multiplier to ensure
consistency (Because normalisation is relaxed). Now take
, so final expression to minimise is
Get three equations, as preceding, each of form
½¾
12
For right-hand side use
so get same bivector for each of the three equations.
Introducing three tensor, one for each pair, get
symmetric
set
of equations
Want to find rotors to minimise mutual antisymmetric
contribution, subject to constraint
. Slightly
more complicated but not hard to solve numerically,
particularly as the individual pairwise minimisers are a good
starting point.
13
U
NKNOWN
R
ANGE
D
ATA
Usually we do not know the range data — instead we just
know the projective vectors on the camera plane
Image Plane
!
"
"
and choose scale with
,
,
"
Represent line
"
in 2-d with the
bivector
(taking
). Components
are
homogeneous coordinates
— independent of scale. Typically
these are measured.
14
Two main sources of
noise
:
1.
Pixelisation Noise
due to finite resolution.
2.
Random Noise
due to camera motion, etc. Assume to be
Gaussian.
Can get a likelihood function by marginalising over the
unknown range data. Do this with integrals of the type
#$
#$
¼
$
%
$
¼
%
¼
which gives a likelihood function going with
%
%
¼
%
%
¼
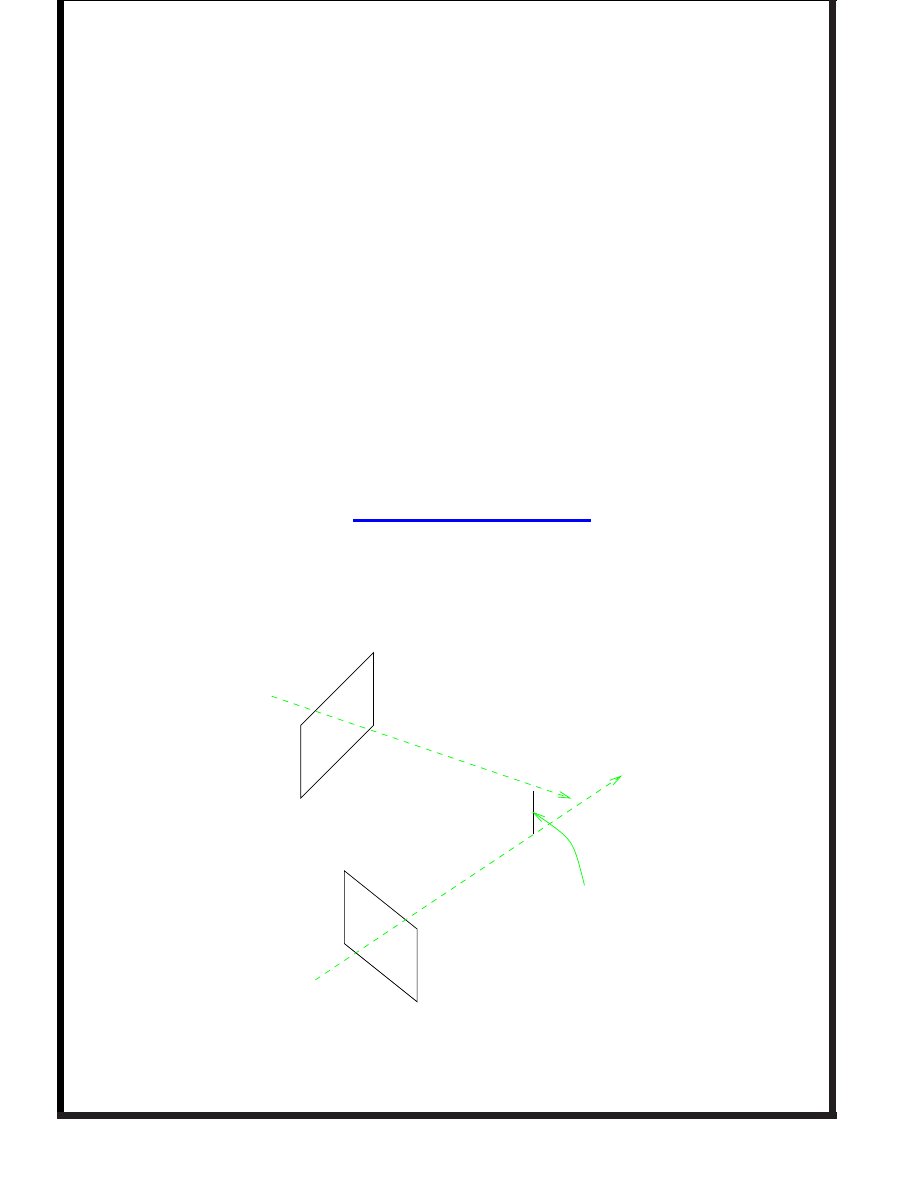
Has a simple
geometric
interpretation
Camera 1
Camera 2
Line Distance
Camera plane vectors extended out to 3-d space.
15
Find the rotor which minimises the squared distance
between
the lines
for each point match.
The setup is
scale-invariant
, so need to impose a scale. Do
this by fixing
with a Lagrange multiplier. Our final
function is
%
%
¼
%
%
¼
This is still quadratic in
and minimising gives the equation
We therefore construct the
symmetric
,
positive definite
function
This is a function of the data and the rotation only. The
translation is the eigenvector corresponding to the minimum
eigenvalue. This eigenvalue is
so the eigenvalue gives the error function. All need do is
minimise the lowest eigenvalue of
with respect to the rotor
. A fairly simple optimisation problem.
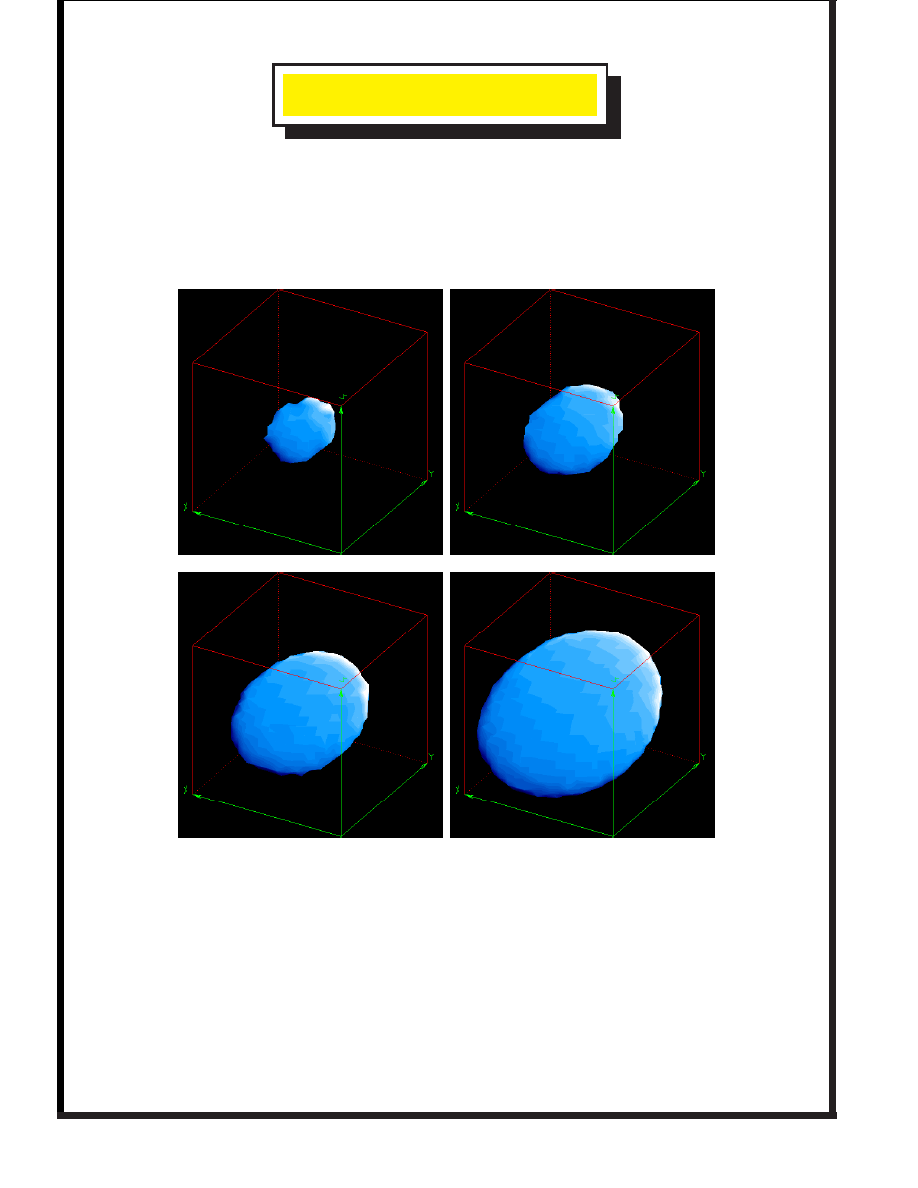
16
N
UMERICAL
R
ESULTS
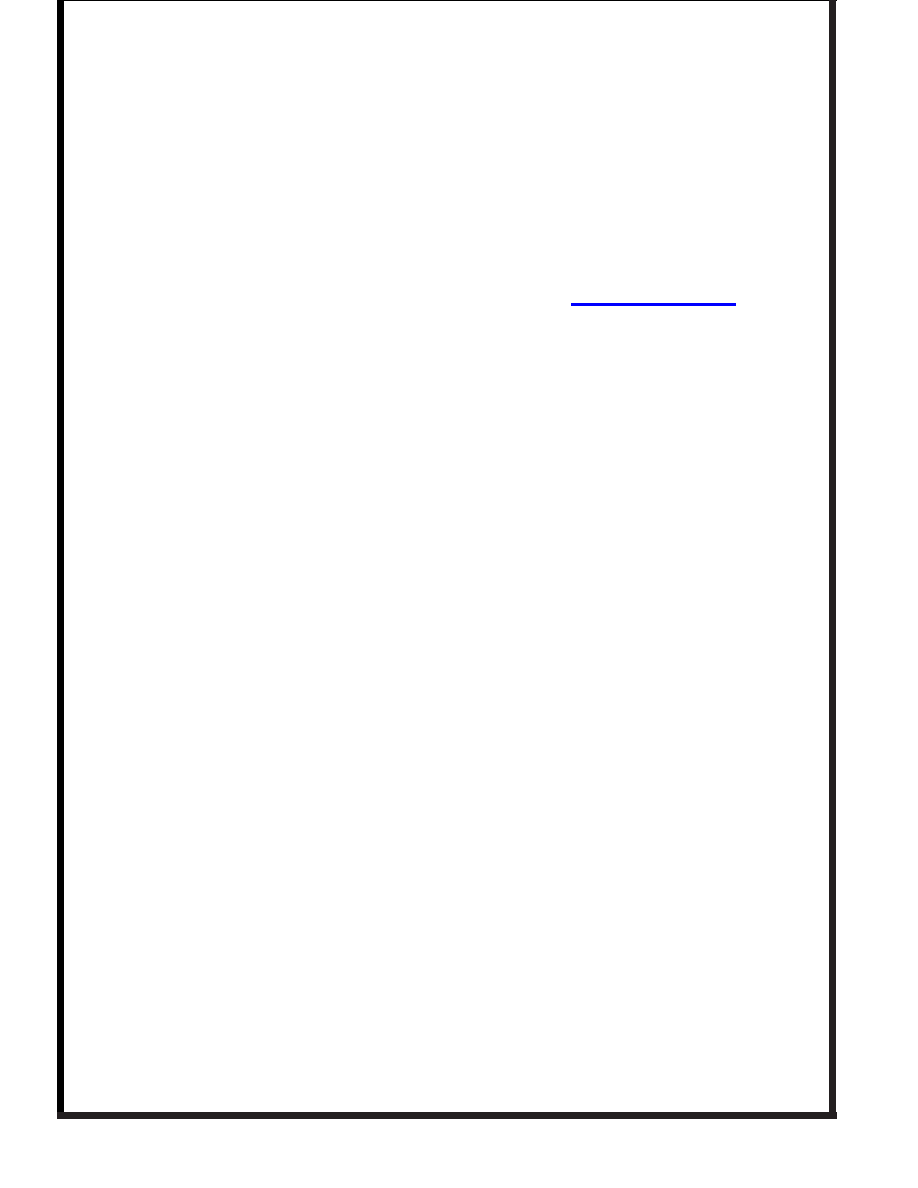
3-d contour plots of the function near the minimum look
reassuring:
The plots show surfaces of increasing
in the bivector space.
A clear trend towards a minimum. These plots used 8,000
function evaluations each. Each plots takes only
1 sec. on
a Pentium II.
17
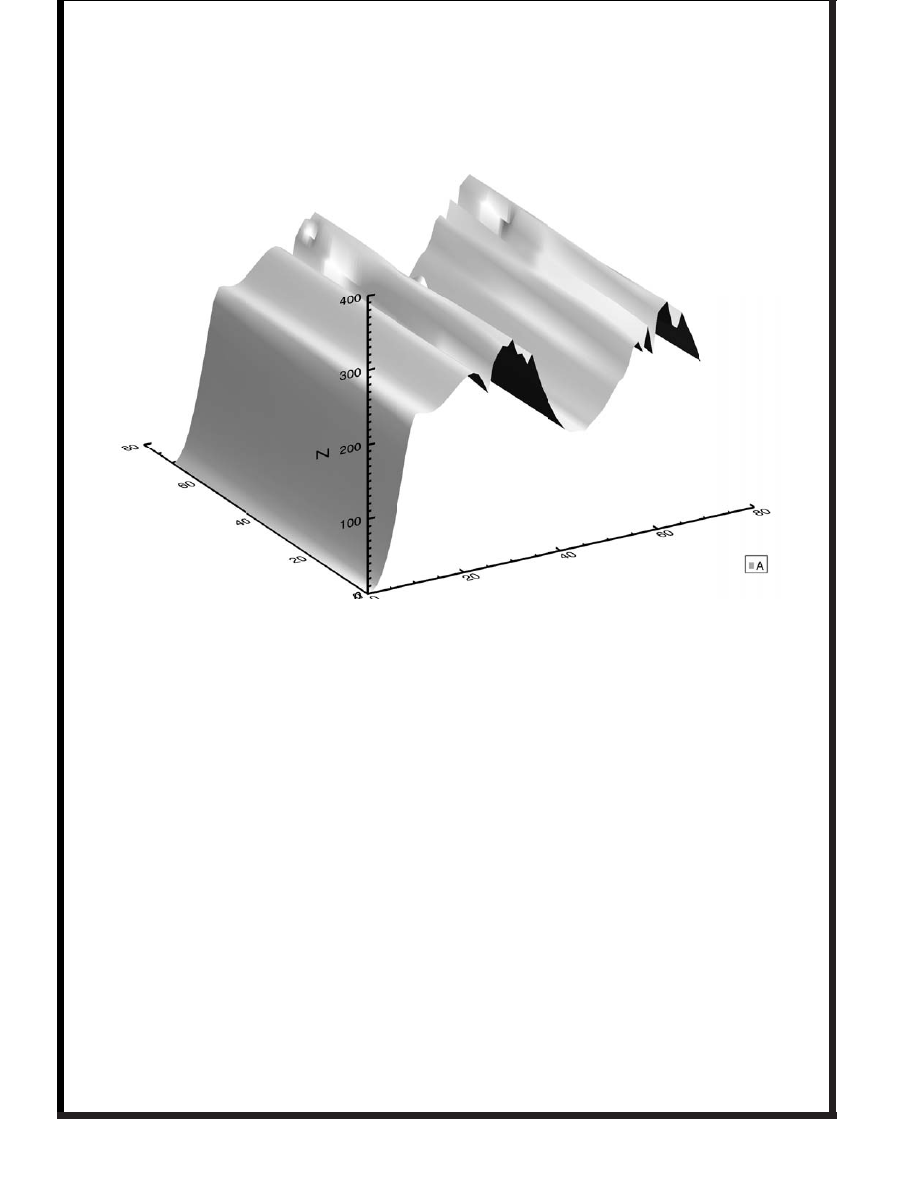
Small Problem
The function has a number of
local minima
. Downhill simplex
routines do not always find the global minimum. Need
annealing methods, or just use brute force.
Also see that function behaves very differently along direction
of rotation. From
¾
Suggests a number of potential improvements — e.g. reduce
to a 2-d function by minimising for angle.
18
E
XTENSION TO
C
AMERAS
Again this is easy. Can immediately write down an expression
to minimise for the translation vectors
Normalisation keeps everything symmetric. Now get three
equations
with the two constraints
The latter ensures that we still have
. Can recast as a
matrix equation of form
Hence find
. Again, look for best fit numerically.
19
C
ONCLUSIONS
1.
Geometric Algebra
is extremely powerful for handling
rotations in 3-d.
2.
Geometric Calculus
is extremely useful for extremisation
problems involving rotations.
3. Many computer vision problems best tackled by working
directly
with rotations and translations.
4. Auto-calibrating cameras for point matches with unknown
range data is not hard, even in the presence of noise.
5. The
Bayesian
derivation highlights the assumptions going
into the algorithms. Can change assumptions to model
noise better. Should give even better results
20
Wyszukiwarka
Podobne podstrony:
Doran & Lasenby PHYSICAL APPLICATIONS OF geometrical algebra [sharethefiles com]
Vicci Quaternions and rotations in 3d space Algebra and its Geometric Interpretation (2001) [share
Rockwood Intro 2 Geometric Algebra (1999) [sharethefiles com]
Lasenby GA a Framework 4 Computing Invariants in Computer Vision (1996) [sharethefiles com]
Burstall Isothermic Surfaces Conformal Geometry Clifford Algebras (2000) [sharethefiles com]
Czichowski Lie Theory of Differential Equations & Computer algebra [sharethefiles com]
Pavsic Clifford Algebra, Geometry & Physics (2002) [sharethefiles com]
Doran et al Conformal Geometry, Euclidean Space & GA (2002) [sharethefiles com]
Doran & Lasenby, Geometric Algebra New Foundations, New Insights
Meinrenken Clifford Algebras & the Duflo Isomorphism (2002) [sharethefiles com]
Doran & Lasenby, Geometric Algebra New Foundations, New Insights
Parashar Differential Calculus on a Novel Cross product Quantum Algebra (2003) [sharethefiles com]
Kollar The Topology of Real & Complex Algebraic Varietes [sharethefiles com]
Brzezinski Quantum Clifford Algebras (1993) [sharethefiles com]
Pavsic Clifford Algebra of Spacetime & the Conformal Group (2002) [sharethefiles com]
Hestenes Homogeneous Framework 4 Comp Geometry & Mechanics [sharethefiles com]
Turbiner Lie Algebraic Approach 2 the Theory of Polynomial Solutions (1992) [sharethefiles com]
Leon et al Geometric Structures in FT (2002) [sharethefiles com]
Lasenby et al 2 spinors, Twistors & Supersymm in the Spacetime Algebra (1992) [sharethefiles com]
więcej podobnych podstron