Jaki jest obszar zainteresowania IRD?
Obszar zainteresowania IRD obejmuje procesy ruchu drogowego, projektowanie, realizację i eksploatację systemów transportowych oraz urządzeń komunikacyjnych, a także organizację i sterowanie ruchem.
Jak zmieniał się obszar zainteresowania IRD?
Na początku swej historii IRD zajmowała się planowaniem geometrycznym i projektowaniem ulic oraz organizacją ruchu celem uczynienia go bezpiecznym, dogodnym i ekonomicznym. W latach następnych IRD zajęła się również pomiarem ruchu, badaniem praw jego powstawania i wykorzystaniem nabytej w ten sposób wiedzy w jego organizacji. Obecnie obszar zainteresowania IRS objął również ograniczenie ujemnego wpływu ruchu na środowisko.
Na czym polega systemowe podejście do problemów IRD?
Systemowe podejście do problemów IRD polega na traktowaniu obiektu zainteresowań jako systemu, którego elementami jest człowiek, pojazd, droga.
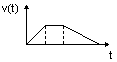
Co to jest przebieg prędkości?
Przebieg prędkości v(t) wykres zmian prędkości pojazdu w kolejnych chwilach czasu przejazdu przez dany odcinek drogi.
Co to jest profil prędkości?
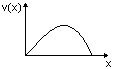
Profil prędkości v(x) wykres zmian prędkości pojazdu wzdłuż odcinka drogi, po którym porusza się pojazd.
Prędkość podróży
Prędkość podróży vt średnia z przebiegu prędkości. Efektywna prędkość pojazdu na danym odcinku.
,gdzie tc - całkowity czas jazdy z wliczonym czasem zatrzymań
Prędkość odcinkowa
Prędkość odcinkowa vx średnia z profilu prędkości (liczona na drodze). Średnia prędkość z jaką pojazd przejechał dany odcinek drogi z pominięciem czasu zatrzymań.
,gdzie tj - czas jazdy z odliczeniem czasów zatrzymań
Podaj związek prędkości odcinkowej i prędkości podróży
gdzie:
wartość średnia prędkości odcinkowej
wartość średnia prędkości podróży
wartość średnia wariancji prędkości podróży
Która z prędkości, podróży czy odcinkowa jest większa? Kiedy będą równe?
Ponieważ występuje zależność:
prędkość odcinkowa jest większa, oprócz sytuacji, gdy pojazd porusza się ze stałą prędkością. Wtedy wariancja prędkości podróży
= 0, a
=
.
Jakie znasz rodzaje obserwacji ruchu drogowego?
• Obserwacja lokalna obserwator stoi w miejscu, rejestruje pojazdy przekraczające przekrój jezdni
• Obserwacja chwilowa obserwator wykonuje zdjęcie pokazujące stan ruchu w danej chwili
• Obserwacja ruchoma obserwator przemieszcza się w czasie i przestrzeni
• Obserwacja quazilokalna dwa pomiary wykonywane obok siebie
• Obserwacja quazichwilowa dwa zdjęcia jedno po drugim lub zapis na kamerze
Co to jest parametr ruchu drogowego, a co estymator?
Parametr jest to wielkość charakterystyczna dla procesu ruchu, na ogół będąca wartością zmienną (np. V(x), V(t), λ(t), pozim hałasu, liczba wypadków), których zbiór tworzy próbę.
Estymator zaś to parametr obliczony z próby w celu scharakteryzowania populacji wyników, będący konkretną wartością, stosowany do prezentacji wyników lub tworzenia modelu systemu transportowego czy wnioskowania statystycznego. Estymatory to miedzy innymi: moda, mediana, wartość oczekiwana, średnia, wariancja czy odchylenie standardowe czyli momenty 10 i 20
(np.
, E(Q), E(M(xi,to,t1)))
Wymień parametry opisujące wielkość strumienia w obserwacji chwilowej i lokalnej
Parametry opisujące wielkość strumienia w obserwacji lokalnej:
odstępy czasu między pojazdami: Δt
strumień jednostkowy pojazdów: Φxi(t)
liczba pojazdów: M(xi , to , t1)
natężenie strumienia ruchu:
intensywność strumienia ruchu:
Parametrami opisującym wielkość strumienia w obserwacji chwilowej są
odstępy drogi między pojazdami: Δx
strumień jednostkowy pojazdów: Ψxi(t)
liczba pojazdów: N(ti , xo , x1)
gęstość strumienia ruchu:
koncentracja strumienia ruchu:
Wymień estymatory opisujące wielkość strumienia w obserwacji chwilowej i lokalnej
w obserwacji lokalnej
E( Φxi(t) )
E( M(xi , to , t1) )
E( Q )
w obserwacji chwilowej
E( Ψxi(t) )
E( N(ti , xo , x1) )
E( Η )
Gdzie: E() wartość oczekiwana
Podaj związek i warunek jego obowiązywania między parametrami opisującymi wielkość strumienia, a ich estymatorami
Aby związki obowiązywały muszą być stacjonarne (jednorodne dla obserwcji chwilowych) czyli momenty 10 i 20 muszą być niezależne od czasu.
λ(t) = λ = const.
E( Φxi(t) ) = λ Δt
E( M(xi , to , t1) ) = λ t
E( Q ) = λ
k(x) = k = const.
E( Ψxi(t) ) = Η Δt
E( N(ti , xo , x1) ) = Η t
E( K ) = Η
Stacjonarność strumienia w czasie stwierdzić można na podstawie:
- testów stochastycznych (test Wilcoxona).
- testów niezależności - jeśli wybrana cecha strumienia (np. odstępy między pojazdami) jest niezależna, tzn., że nie zależy od czasu, a więc strumień jest stacjonarny
- obserwacji funkcji strumienia od czasu Φxi(t) (lub Ψti(x)) - strumień stacjonarny można aproksymować linią prostą.
Wymień parametry opisujące przemieszczanie się pojazdów w obserwacji lokalnej i chwilowej.
• Obserwacja lokalna
gl(v) funkcja gęstości prawdopodobieństwa rozkładu prędkości
Gl(v) dystrybuanta rozkładu prędkości
wartość oczekiwana prędkości strumienia
średnia wartość prędkości (estymator)
• Obserwacja chwilowa
gm(v) funkcja gęstości prawdopodobieństwa rozkładu prędkości
Gm(v) dystrybuanta rozkładu prędkości
wartość oczekiwana prędkości
średnia wartość prędkości (estymator)
Wymień związek pomiędzy wartościami oczekiwanymi (lub średnimi) prędkości pojazdów w obserwacjach chwilowych i lokalnych.
gdzie:
El(v) - wartość oczekiwana prędkości w obserwacji lokalnej
Em(v) - wartość oczekiwana prędkości w obserwacji chwilowej
- wariancja wartości oczekiwanej predkości w obserwacji chwilowej
Które z wartości oczekiwanych prędkości strumienia pojazdów w obserwacjach chwilowych czy lokalnych jest większa? Kiedy będą równe?
Zgodnie ze wzorem
większa jest wartość oczekiwana prędkości w obserwacji lokalnej (o ile
nie może być ujemne !nie o ile tylko nie może być ujemne bo coś do 2 zawsze jest dodatnie!).
Podaj podstawowe równanie ruchu drogowego
λ = κEm(v)
gdzie:
λ - intensywność strumienia ruchu
κ - koncentracja strumienia ruchu
Em(v) - wartość oczekiwana prędkości w obserwacji chwilowej
Podaj związek pomiędzy intensywnością i koncentracją strumienia pojazdów
Związek między intensywnością i koncentracją strumienia pojazdów ujmuje fundamentalne równanie ruchu drogowego:
λ = κEm(v)
gdzie:
λ - intensywność strumienia ruchu
κ - koncentracja strumienia ruchu
Em(v) - wartość oczekiwana prędkości w obserwacji chwilowej
Co to jest i po co wprowadzono współczynniki przeliczeniowe pojazdów rzeczywistych i umownych?
Współczynniki przeliczeniowe wyrażają zróżnicowane własności techniczno-ruchowe różnych rodzajów pojazdów, w stosunku do samochodu osobowego, przyjętego za umowny pojazd porównawczy. Umożliwiają przeliczenie natężenie ruchu wyrażonego w pojazdach rzeczywistych(P) na natężenie w pojazdach umownych(E). Współczynniki te wprowadzone zostały, aby ujednolicić strukturę strumienia pojazdów, co umożliwia policzenie takich wielkości jak przepustowość. Zależą od cech strumienia cech zachowania pojazdów i ich parametrów (zajmowany obszar, przyspieszenie, liczba pasażerów, dynamika)
Narysuj i zinterpretuj statyczną charakterystykę strumienia pojazdów
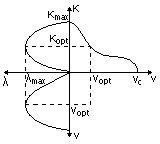
Wraz ze wzrostem koncentracji ruchu κ maleje jego prędkość v. Koncentracja zmienia się w granicach od 0 (kiedy intensywność λ jest równa 0 i ruch nie występuje) do pewnej maksymalnej wartości κmax (odpowiadającej sytuacji, gdy samochody stoją w korku, a prędkość jest równa 0). Pomiędzy tymi granicami znajduje się koncentracja optymalna κopt przy której występuje maksymalna intensywność strumienia λmax, równa przepustowości drogi. Sytuacja ta zachodzi przy pewnej optymalnej prędkości vopt. Przy większej koncentracji strumienia ruch jest wymuszony i odbywa się z mniejszą prędkością.
Warunki brzegowe:
ၬ=0 dla ၫ=0
ၬ=0 dla ၫ= ၫmax
v=vc dla ၫ=0
v=0 dla ၫ= ၫmax
limx→0(dv/dၫ)=0 lub limx→0(dλ/dၫ)=V
Podaj równanie stanu i narysuj funkcję λ=f[Em(v)], λ=f(k), Em(v)=f(k).
λ = κEm(v) równanie stanu
gdzie:
λ - intensywność strumienia ruchu
κ - koncentracja strumienia ruchu
Em(v) - wartość oczekiwana prędkości w obserwacji chwilowej
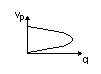
λ=f[Em(v)]
Wyjaśnij pojęcie przepustowości
Przepustowość C
teoretycznie określona największa liczba pojazdów jaka w określonych warunkach geometrycznych i ruchowych, dogodnych warunkach atmosferycznych i zapewnieniu bezpieczeństwa ruchu, może przejechać przez określony przekrój jezdni.
Wymień czynniki drogowe i ruchowe wpływające na przepustowość odcinków dróg zamiejskich
• Czynniki drogowe
- szerokość jezdni
- liczba i szerokość pasów ruchu
- szerokość chodnika, poboczy i pasa zieleni
- przeszkody boczne i ich oddalenie od pasa jezdni
- rozwiązanie przestrzenne
- dodatkowe pasy ruchu
- przebieg drogi w planie i w profilu (klasa techniczna drogi, prędkość projektowa, promienie łuków poziomych)
- widoczność na wyprzedzanie
• Czynniki ruchowe
- struktura kierunkowa ruchu (obciążenie ruchem poszczególnych pasów)
- struktura rodzajowa ruchu (zwłaszcza udział ruchu ciężkiego)
- prędkość ruchu, zatrzymania, utrudnienia
- wahania ruchu (nierównośći)
- parkowanie (dowolne lub zakaz)
- organizacja ruchu na jezdni (oznakowanie itp.)
- obecność komunikacji zbiorowej (przystanki, ich rodzaje i usytuowanie)
- kolizje z ruchem pieszym
- organizacja świetlna
• Umiejętności i nawyki kierowców
• Wielkość miasta i lokalizacja w mieśc
Definicja
Inżynieria ruchu drogowego jest dziedziną inżynierii zajmującą się badaniami procesów ruchu drogowego i praktycznym zastosowaniem wiedzy o ruchu w planowaniu, projektowaniu, realizacji i eksploatacji systemów transportu oraz urządzeń komunikacyjnych a zwłaszcza organizacja i sterowanie ruchem.
Podstawowym celem inżynierii jest zapewnienie bezpiecznego, sprawnego i ekonomicznego przemieszczania się osób i ładunków przy ograniczeniu ujemnego wpływu transportu na środowisko.
4 Natężenie
Natężenie jest szczególną cechą ruchu drogowego. Podstawowe kryterium do podejmowania decyzji komunikacyjnych
Analiza:
- gdzie natężenie zostało zmierzone ?
- jak długo to trwało ?
Natężenie podlega wahaniom:
- w przestrzeni
- w czasie
Wskaźniki natężenia ruchu pojazdów w przestrzeni:
- wielkość celów i źródeł ruchu
- wartość wskaźnika motoryzacji
- różne indywidualne potrzeby człowieka
- różny rodzaj zainwestowania terenu
Wahania ruchu w przestrzeni
- wielkość celów i źródeł leżących na trasie lub obok niej
- wielkość wskaźnika motoryzacji
- zamożność społeczeństwa
Rozkład ruchu w przestrzeni:
- natężenie ruchu w danym kierunku
- liczba pasów ruchu
- wpływ przeszkód bocznych
- liczba pojazdów na sąsiednim pasie ruchu
- liczba wolnojadących lub parkujących przy krawężniku pojazdów
- liczba włączeń i wyłączeń z trasy (dostępność trasy)
Ruch na pasie prawym uzależniony jest od:
- dopuszczenia zatrzymania
- użytkowania przez komunikację miejską
Brak oznakowania poziomego powoduje obciążenie pasa drugiego a nie wykorzystanie pasa trzeciego. Poszczególne obciążenie pasów jest uzależnione od struktury rodzajowej.
Pojazdy ciężarowe trzymają się pasa pierwszego rzadziej pasa drugiego.
Zmienność natężenia ruchu w czasie
Proces ruchu drogowego jest procesem stochastycznym. Wartość natężenia w czasie podlega pewnym prawidłowym wahaniom. Te wahania zależą od dwóch grup:
- zależnych od człowieka (różne potrzeby komunikacyjne w różnym czasie)
- niezależnych od człowieka (czynniki atmosferyczne ograniczające wielkość ruchu)
Wyróżniamy pięć analiz (czynniki wpływające na ruch):
1.) Zmiany zachodzące w latach
2.) Zmiany zachodzące w miesiącach lub porach roku
3.) Zmiany zachodzące w dniach tygodnia
4.) Zmiany zachodzące w godzinach doby
5.) Zmiany zachodzące w okresach kilkuminutowych w ciągu godziny.
Ad 1.)
Czynniki powodujące zmianę ruchu w cyklu wieloletnim:
- wzrost motoryzacji
- łatwiejszy dostęp do pojazdów
Ad 2.)
- zmiany natężenia ruchu w ciągu roku
- największe natężenie ruchu obserwuje się w miesiącach lipiec - sierpień
- najmniejsze wahania ruchu obserwuje się na drogach gdzie przeważa ruch ciężarowy
- w miesiącach jesiennych obserwuje się wzrost ruchu ciężarowego
- drogi o charakterze turystycznym, rekreacyjnym charakteryzują się największymi wahaniami ruchu w ciągu roku
Ad 3.)
- od poniedziałku do piątku natężenie ruchu na ulicach utrzymuje się na zbliżonym poziomie 12-16% ruchu tygodniowego
- w okresach sobota - niedziela występują duże wahania ruchu; ruch ciężarowy maleje; pora roku silnie oddziaływuje na wahania ruchu weekendowego.
Ad 4.)
- wykazują % największe wahania
- im mniejsze miasto tym ostrzejsze szczyty
Ad 5.)
Wskaźnik n-miunutowej nierównomierności ruchu
najczęściej - 15 minutowy wskaźnik nierównomierności ruchu
(0,25 - 1)
Najbardziej nierównomierny będzie wtedy gdy wszystkie pojazdy przejadą w ciągu 15 minut
Typowe wartości (0,85 - 0,95)
Mimo, że ruch kołowy jest procesem losowym, to możemy wyróżnić pewne prawidłowości. Niektóre z nich to:
- wahania ruchu w poszczególnych latach związane z zamożnością społeczeństwa i wielkością wskaźnika motoryzacji
- zmiany natężenia w ciągu roku
a) roczne potrzeby komunikacyjne w poszczególnych miesiącach
b) zróżnicowane warunki atmosferyczne
Największe natężenie ruchu na drogach zamiejskich obserwujemy lipcu i sierpniu. Powyższe powoduje zmniejszenie natężenia na ulicach miast, które nie są miastami tranzytowymi ani atrakcyjnymi turystycznie.
W przypadku miast o dużej atrakcyjności również w lipcu zauważa się wzrost natężenia.
W miastach średnie natężenie dobowe od listopada do maja jest mniejsze od średniorocznego.
W maju i październiku ruch dobowy jest zbliżony do średniorocznego.
Ruch ciężarowy charakteryzuje się najmniejszymi wahaniami.
Wzrost ruchu ciężarowego w miesiącach jesiennych wiąże się z transportem płodów rolnych.
Od poniedziałku do piątku w miastach ruch utrzymuje się mniej wiecej na tym samym poziomie.
Wahania w poszczególnych godzinach doby są najbardziej zróżnicowane. Głownie te wahania bierzemy pod uwagę. Charakter dobowych wahań ruchu zależy od dni tygodnia:
- dni robocze
- soboty
- niedziele
W miastach wyróżniamy generalnie dwa szczyty komunikacyjne.
- poranny
- wieczorny
Im mniejsze miasto, tym szczyt ostrzejszy i krótszy.
Miarodajne natężenie ruchu - natężenie n-tej godziny
24h * 365 = 8760 pomiarów
Przeciętny ruch miesięczny = 1/12 ruchu zanotowanego w ciągu roku
Średniodobowe natężenie ruchu dowolnego miesiąca
Przeciętny ruch tygodniowy = 1/52 globalnego ruchu zanotowanego w ciągu roku
Przeciętny ruch dobowy = 1/365 ruchu zanotowanego w ciągu roku
SRD, SRM = Q =
Przeciętny ruch godzinowy = 1/8760 globalnego ruchu zanotowanego w ciągu roku
α = 0,08 - 0,1 dla ulic
α = 0,087 - 0,146 dla dróg wylotowych
α - współczynnik wahań ruchu
|
Średnioroczne Natężenie Dobowe |
|
|
7200 |
7200 |
|
A |
B |
Q1 (max) |
2462 |
988 |
Q10 |
2106 |
896 |
Q20 |
1986 |
888 |
Q30 |
1892 |
864 |
Q50 |
1720 |
840 |
Q100 |
1506 |
800 |
Najczęściej projektujemy drogi dla 50. lub 80. godziny w roku.
5 Przepustowość
Przepustowość - teoretycznie określana największa liczba pojazdów jaka w określonych warunkach geometrycznych i ruchowych oraz w dogodnych warunkach atmosferycznych z zachowaniem bezpieczeństwa ruchu może przejechać przez określony przekrój jezdni.
Przepustowość podstawowa (wyjściowa) - największa liczba pojazdów, jaka może w idealnych warunkach geometrycznych i ruchowych przejechać przez określony przekrój jezdni. C0
Przepustowość projektowa - (natężenie krytyczne) -
To jest największa liczba pojazdów które mogą w ciągu godziny przejechać przez badany przekrój jezdni z zachowaniem warunków charakterystycznych dla wybranego poziomu swobody ruchu i.
Warunki ruchu drogowego: Zespół czynników określających jakość sytuacji drogowo - ruchowej w której znajduje się użytkownik drogi.
Poziomy swobody ruchu - jakościowa zmiana warunków ruchu uwzględniająca odczucia kierowców i innych użytkowników drogi. Cały zakres warunków ruchu jest podzielony na 6 klas swobody ruchu oznaczonych dużymi literami od A do F. Poziom swobody A odpowiada najlepszym a F najgorszym warunkom ruchu.
Poziom swobody ruchu |
Opis |
A |
Ruch swobodny, duża swoboda wyboru prędkości i manewrowania |
B |
Ruch równomierny - prędkość podróży i swoboda manewrowania ograniczona w niewielkim stopniu |
C |
Ruch równomierny, wybór prędkości wyraźnie ograniczony; manewry wymagają dużej uwagi ze względu na obecność innych pojazdów |
D |
Ruch nierównomierny, wybór prędkości i manewrów jest bardzo ograniczony. Komfort jazdy niski. Chwilowe wzrosty natężenia powodują zakłócenia ruchu |
E |
Ruch nierównomierny, natężenie ruchu odpowiada przepustowości drogi. Prędkość ustabilizowana na stosunkowo niskim poziomie. Manewrowanie odbywa się jedynie na zasadzie wymuszenia. Niewielki wzrost natężenia lub chwilowe zatrzymanie ruchu prowadzą do poważnych zakłóceń |
F |
Ruch wymuszony. Takie warunki ruchu występują w przypadku gdy natężenie ruchu dojeżdżającego do danego przekroju drogi przekracza jej przepustowość. Mała prędkość, ruch wymuszony, zatrzymania ruchu. W skrajnych przypadkach natężenie i prędkość spadają do zera. |
Mierniki charakteryzujące poziom swobody ruchu
zależne od prędkości podróży: Vpodr = Em(v)
zależne od intensywności: λ = f(λ/C)
wg. HCM - 65
Według HCM - 85 przyjmuje się inne miary poziomu swobody ruchu:
procent czasu blokowania: procent czasu, w którym pojazdy jadąc w kolumnie ponoszą straty na skutek braku możliwości wyprzedzania; szacujemy, mierząc jaki procent pojazdów poruszą się w odstępach krótszych niż 5 sekund
średnia prędkość podróży (2 pas. 2 kier. idealne war. ruchu)
Procent czasu blokowania - jest określany jako średni procent łącznego czasu podróży w którym pojazdy jadąc w kolumnie ponosząc straty wskutek braku możliwości wyprzedzenia.
Jako miarę warunków ruchu przyjęto procent pojazdów jadących w odstępach czasu mniejszych niż 5 sekund. Ta liczba odstępów wyznacza poziom swobody ruchu.
PSR |
Średni % czasu blokowania |
Średnia prędkość podróży |
|
A |
< 30 |
|
420 |
B |
< 45 |
|
750 |
C |
< 60 |
|
1200 |
D |
< 75 |
|
1800 |
E |
> 75 |
|
2800 |
F |
100 |
< 72 km/h |
- |
Określenie przepustowości
DROGA
POJAZD
CZŁOWIEK
C [poj/h]
Wyszukiwarka
Podobne podstrony:
Ubezpieczenia związane z transportem drogowym
znaki drogowe
przewoz drogowy po nowelizacji adr
wypadki drogowe
30 Obciążenia obiektów budowlanych, mostów drogowych i kolejowych
1 Znaki i Przepisy Drogowe 1 221
Budowa mostu drogowego w Toruniu
prawo ruchu drogowym
Drogowe obiekty inżynierskie
mechanik maszyn i urzadzen drogowych 833[01] z1 01 n
BADANIA DROGOWE
Kodeks drogowy stan prawny na styczeń 2011
Ostre schorzenia chirurgiczne jamy brzusznej, Ratownictwo Medyczne, dużo mega różności od starszyzny
więcej podobnych podstron