POLITECHNIKA ŚLĄSKA
Wydział Mechaniczny Technologiczny
Kierunek Automatyka i Robotyka
Semestr IV
Rok akademicki 2006/2007
MANIPULATOR - PROJEKT
Sporządzili:
BUJNOWSKI Marek
GÓRNY Paweł
PORĘBA Grzegorz
STABIK Karol
SPIS TREŚCI
I. KINEMTYKA
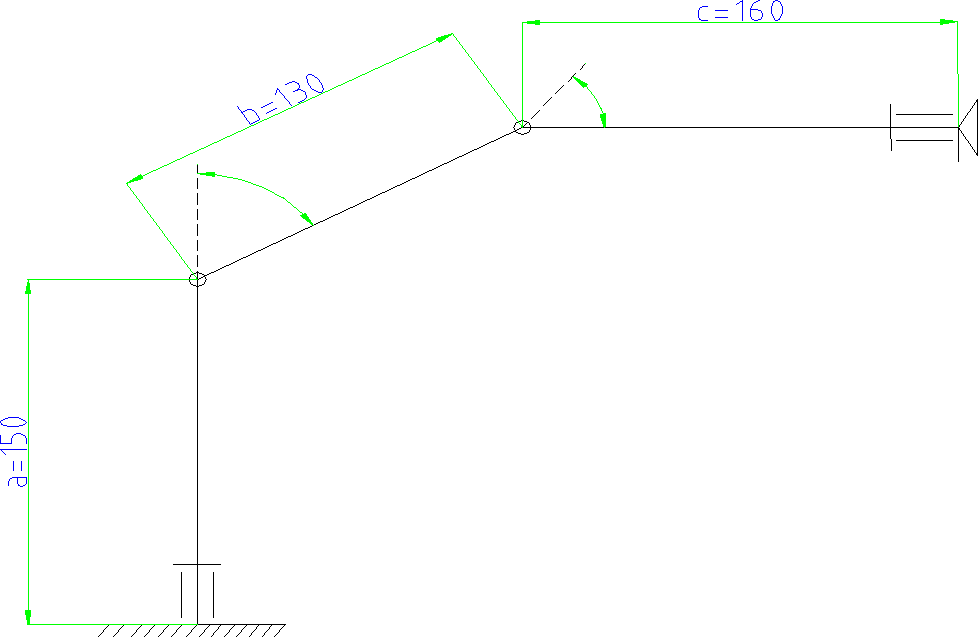
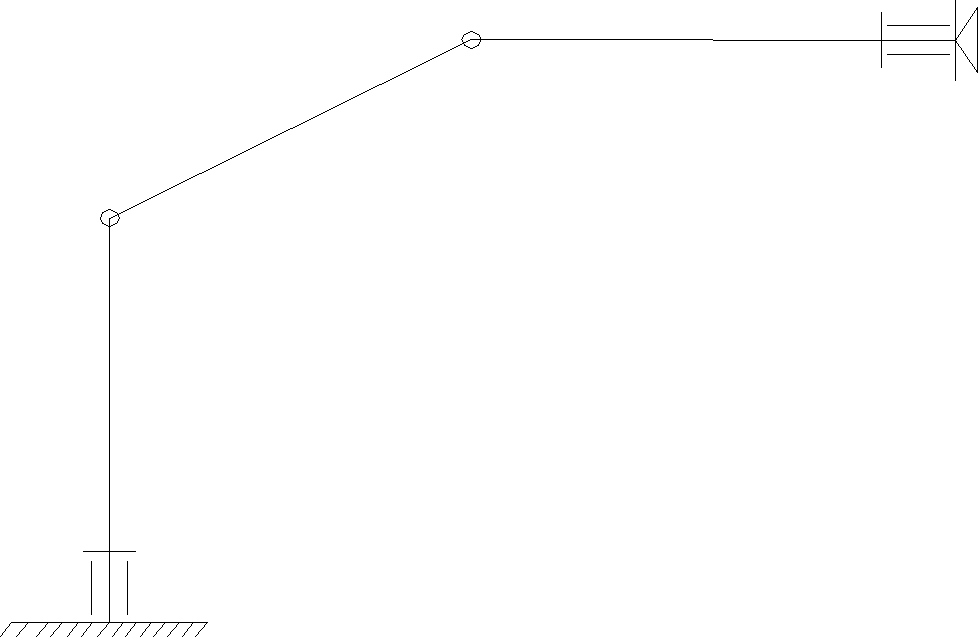
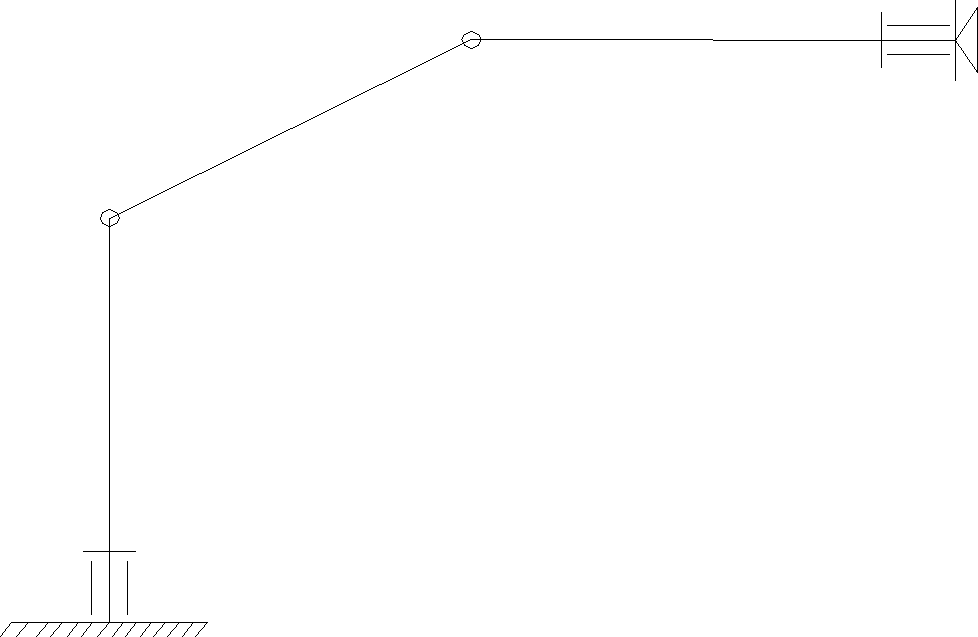
1. Schemat kinematyczny manipulatora:
2. Zadanie proste kinematyki:
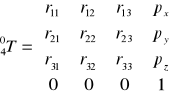
W podstawie manipulatora wiążemy układ współrzędnych, tak że nasz początkowy układ współrzędnych ma postać:
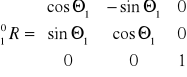
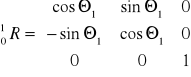
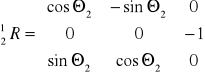
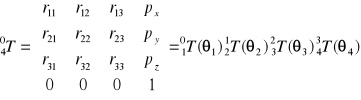
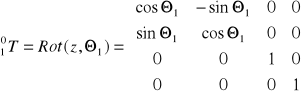
Pierwsze przekształcenie układu 0 w układ 1 polega na obrocie wokół osi Z o kąt Ө1. Nasza macierz ma teraz postać:
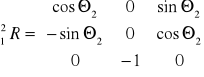
Drugie przekształcenie układu 1 w układ 2 ma postać:
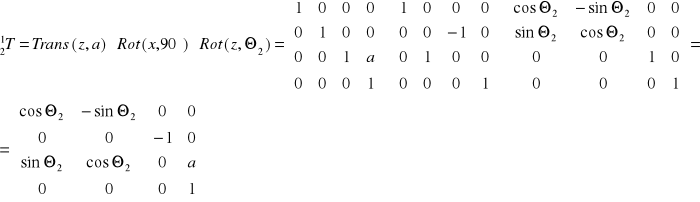
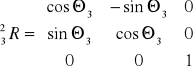
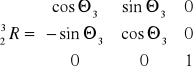
Kolejne przekształcenie ma postać:

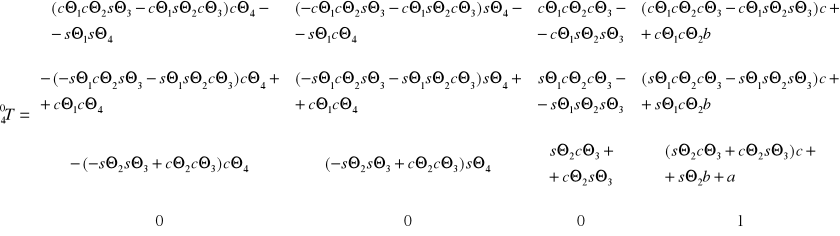
Macierz transformacji ![]()
ma postać:

i |
αi-1 |
ai-1 |
di-1 |
Өi-1 |
1 |
0 |
0 |
0 |
Ө1 |
2 |
90° |
0 |
a |
Ө2 |
3 |
0 |
b |
0 |
Ө3 |
4 |
-90° |
c |
0 |
Ө4 |
![]()
3. Obliczenie prędkości i przyspieszeń




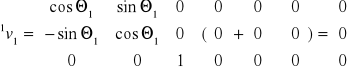
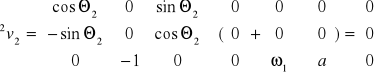
3.1 Obliczanie prędkości kątowych
![]()

-bo nie ma pary kinematycznej
![]()
![]()

![]()

![]()
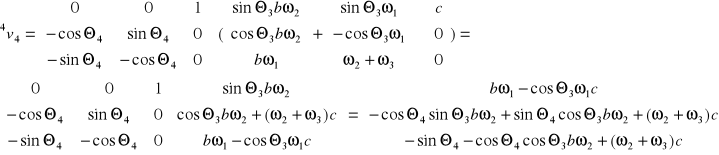
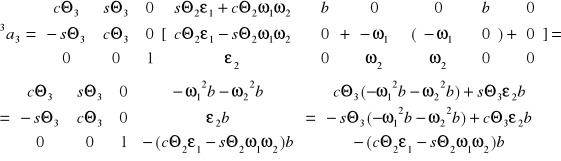
3.2 Obliczanie prędkości liniowych
![]()

![]()
![]()
![]()

![]()
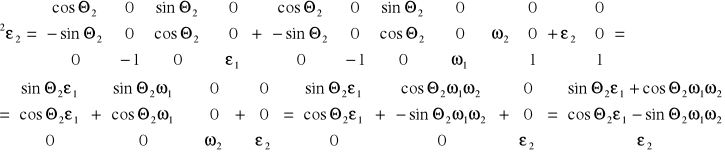
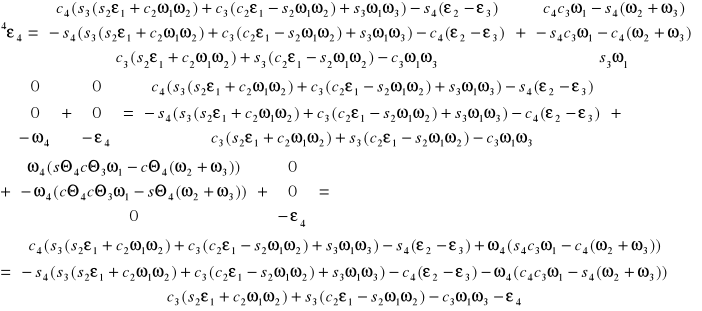
3.3 Obliczanie przyspieszeń kątowych
![]()

![]()

![]()
![]()
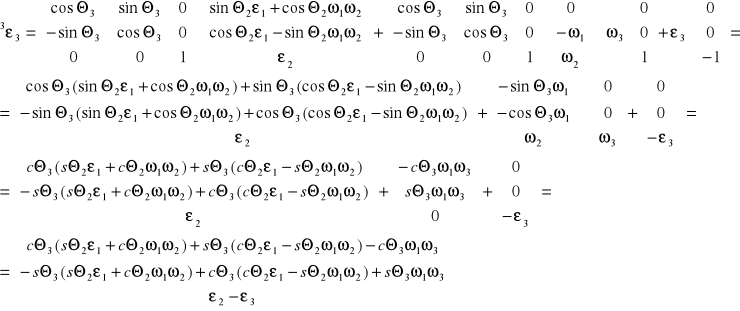
![]()
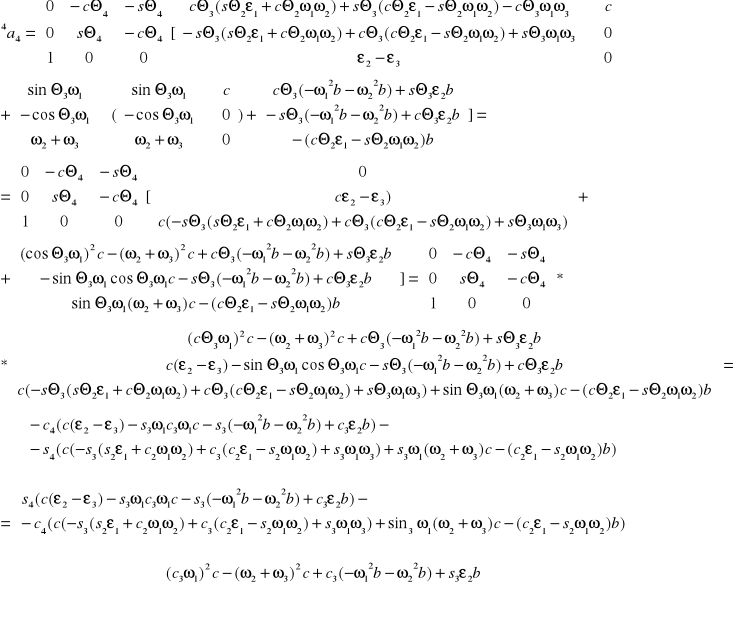
3.4 Obliczanie przyspieszeń liniowych
![]()

![]()

![]()

![]()
![]()
4. Zadanie odwrotne kinematyki
Wyznaczenie Ө1:
![]()
Odwracając macierz ![]()
otrzymujemy
Porównując elementy (2,4) z obu stron :
![]()
![]()
Dzieląc przez px i ![]()
otrzymujemy:

![]()
II. DYNAMIKA
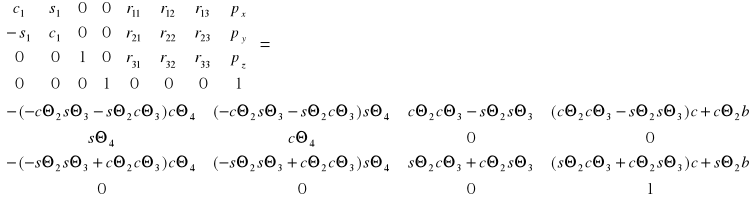
5. Przyspieszenie liniowe z uwzględnieniem siły grawitacji
![]()

![]()

![]()

![]()
![]()
6. Położenie środków mas i momenty bezwładności:
Na pomocą programu Inventor, którym wykonaliśmy model naszego manipulatora otrzymaliśmy położenie środka masy i momenty bezwładności poszczególnych członów:

![]()
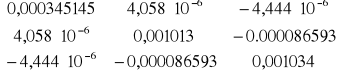
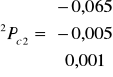
![]()
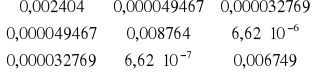
![]()
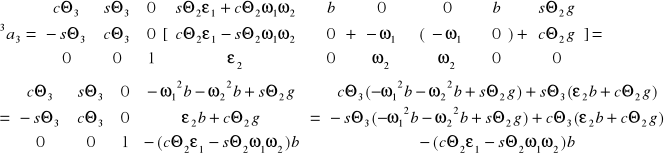
7. Przyspieszenia środków ciężkości
![]()
![]()
![]()
![]()
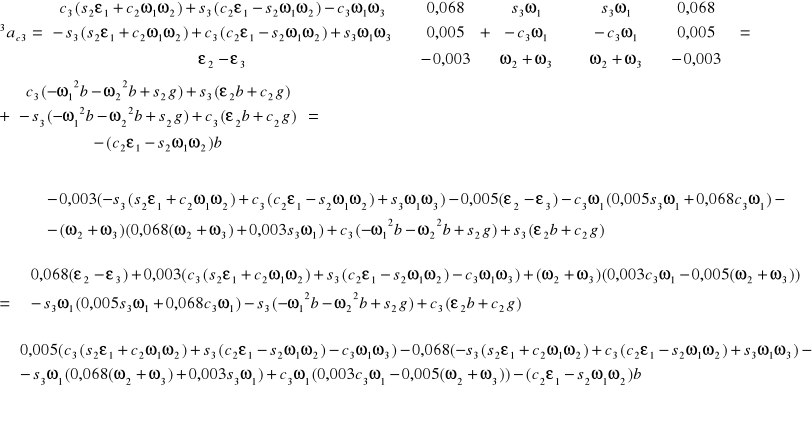
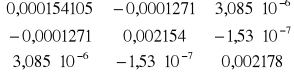
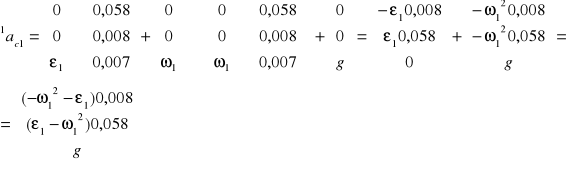
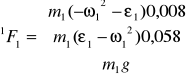
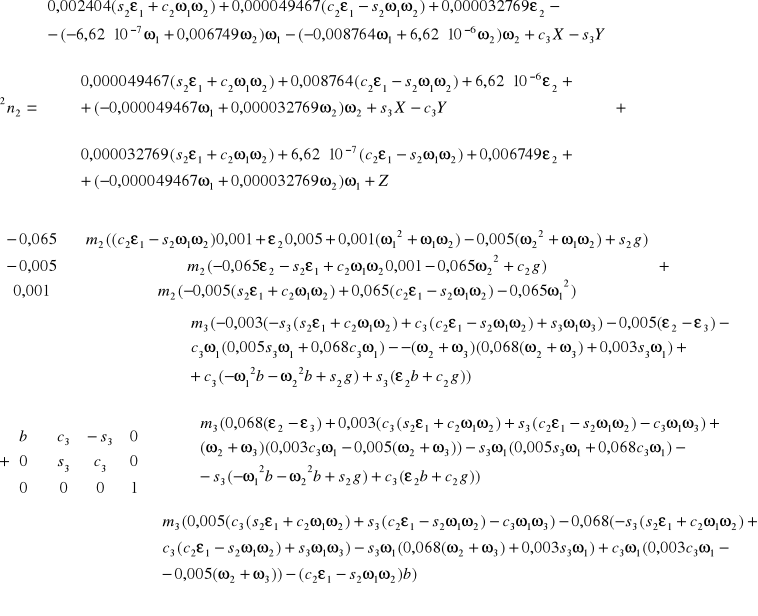
8. Obliczenie siły bezwładności
![]()
![]()
![]()

![]()
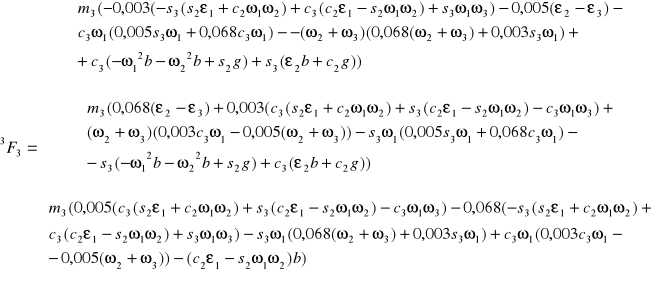
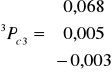
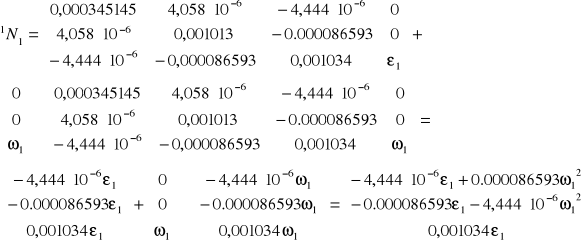
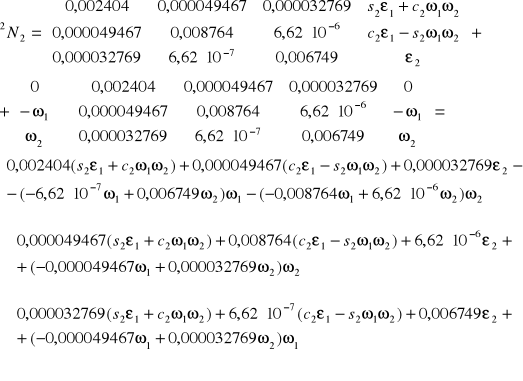
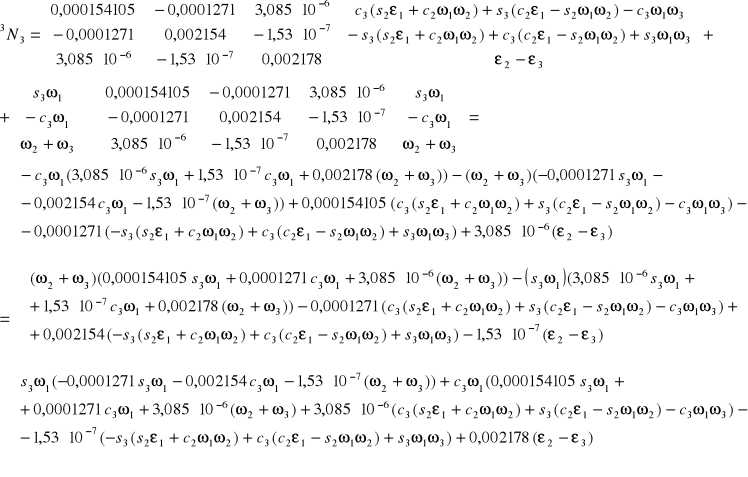
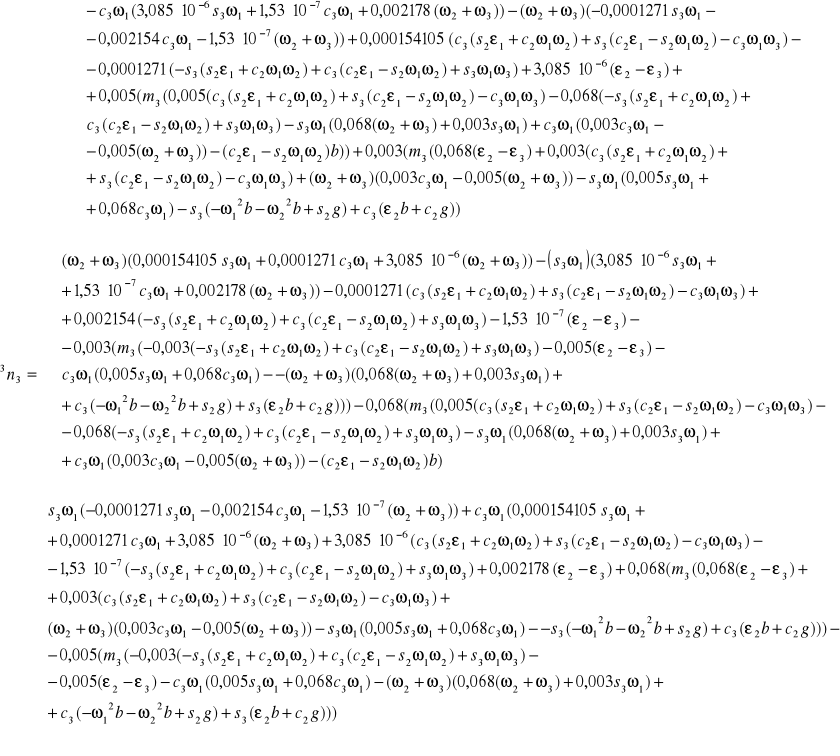
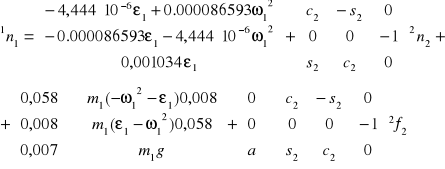
9. Obliczenie momentów bezwładności
![]()
![]()
![]()
![]()
![]()
![]()
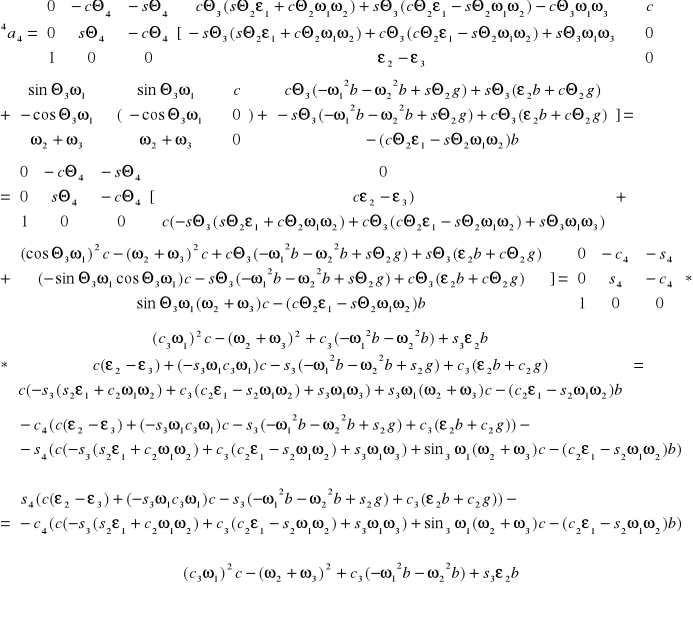
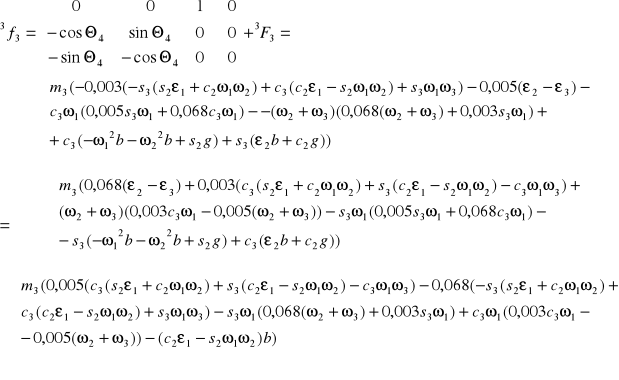
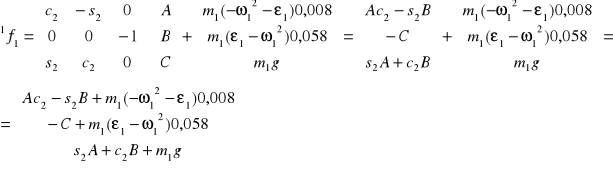
10. Obliczanie sił napędowych
![]()
![]()

bo nie występują siły działające na końcówkę wykonawczą
![]()
![]()
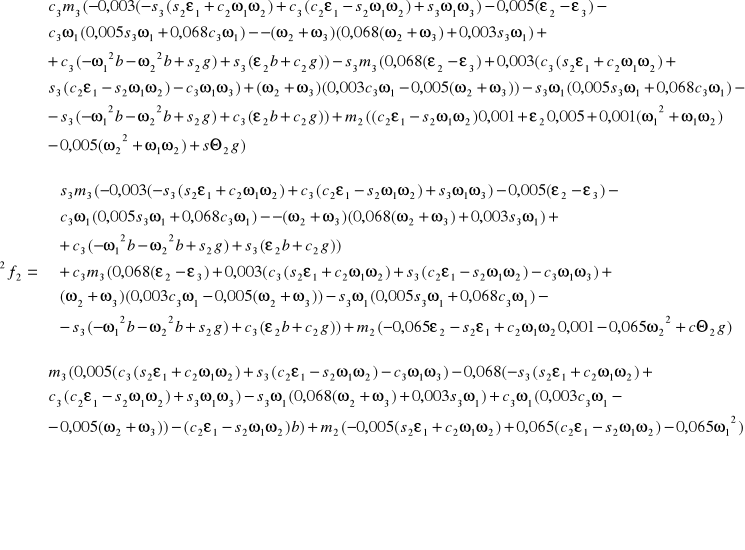
Ze względu na wielkość wektora stosujemy uproszczenie polegające na symbolicznym zastąpieniu wartości macierzy ![]()

![]()
11. Obliczanie momentów napędowych
![]()

bo nie występują siły działające na końcówkę wykonawczą
![]()
Ze względu na wielkość wektora stosujemy uproszczenie polegające na symbolicznym zastąpieniu wartości macierzy ![]()

![]()
![]()
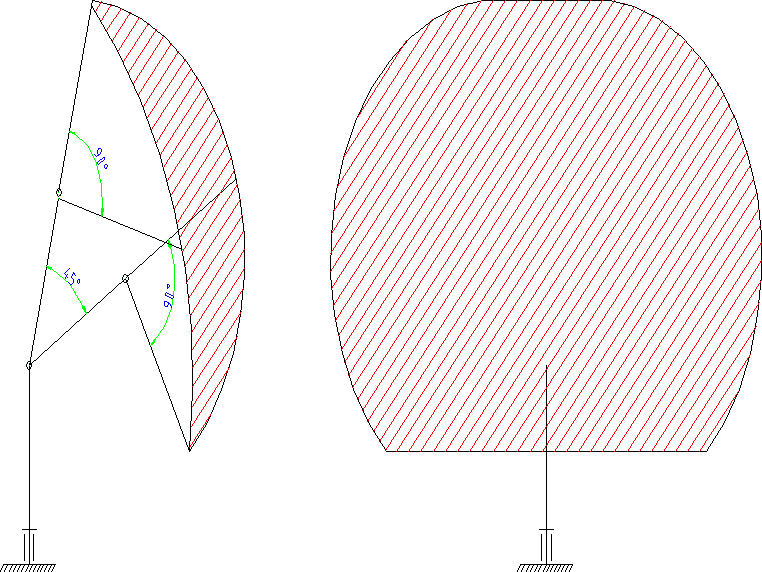
11. Przestrzeń robocza manipulatora
15
Ө1
Ө2
Ө3
Ө4
x0
y0
z0
x4
z4
y3
x3
y2
x2
z2
y0
z0
x0
z3
x1
z1
y1
y4
ε3
ε2
ω4 ε4
ω1
y3
x3
y2
x2
z2
y0
z0
x0
z3
x1
z1
ω2
ω3
Wyszukiwarka
Podobne podstrony:
Kinematyka odwrotna, Automatyka i Robotyka, Semestr 4, Kinematyka i Dynamika Robotów i Manipulatorów
Notacja Denavita, Automatyka i Robotyka, Semestr 4, Kinematyka i Dynamika Robotów i Manipulatorów, p
robocik, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Projekt2
Bazy danych - cz zagadnie do egzaminu, Automatyka i Robotyka, Semestr 3, Bazy danych, BD, BD, Ba
środowisko, Automatyka i Robotyka, Semestr 2, Ekologia i zarządzanie środowiskiem, mój projekt
Interpolacja, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Podstawy stero
mój projekt, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn
Zadanie proste 2, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Podstawy s
mój projekt KB, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn
1 Kinematyka i dynamika robotów i manipulatorów literatur
1 Kinematyka i dynamika robotów i manipulatorów literatur
Proste zadnie kinematyki, Automatyka i Robotyka, Semestr IV, Kinematyka i dynamika robotów, KIDRIM,
więcej podobnych podstron