Notacja Denavita-Hartenberga - kinematyka prosta
Ogólny wzór notacji Denavita-Hartenberga ma postać:
Ti-1 i = Rot(x,αi-1)*Trans(x,ai-1)*Rot(z,Θi)*Trans(z,di)
postać macierzowa:
po obliczeniu na wartościach:

Obliczenia na symbolach ogólnych
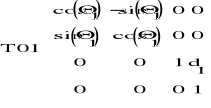
macierz przekształceń podstawy (1 pary kinematycznej):
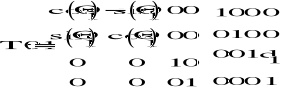
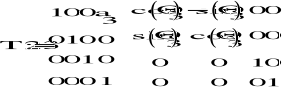
T01= Trans(z,d1)*Rot (z,Θ1)
macierz przekształceń 2:
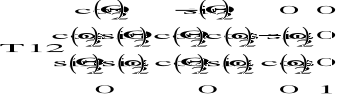
T12= Rot(x,α2)*Rot(z,Θ2)
macierz przekształceń 3:
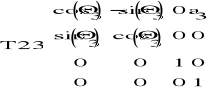
T23= Trans(x,a3)*Rot(z,Θ3)
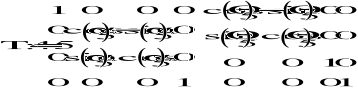
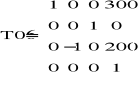
macierz przekształceń 4:
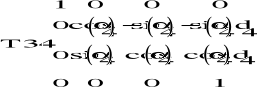
T34= Rot (x,α4)*Trans(z,d4)
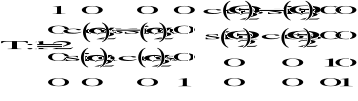
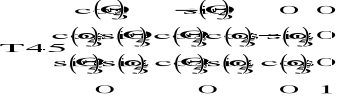
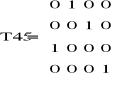
macierz przekształceń 5:
T45= Rot(x,α5)*Rot(z,Θ5)
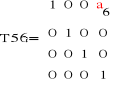
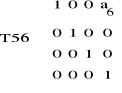
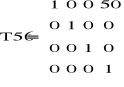
macierz przekształceń 6:
T56= Trans(x,a6)
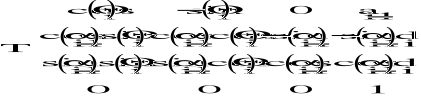
wynikowa macierz przekształceń:
![]()

.

Obliczenia na wartościach liczbowych
Dane do obliczeń
![]()
![]()
![]()
![]()
![]()
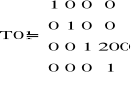
macierz przekształceń podstawy (1 pary kinematycznej):
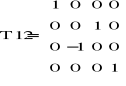
macierz przekształceń 2:
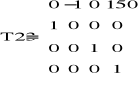
macierz przekształceń 3:
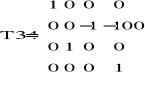
macierz przekształceń 4:
macierz przekształceń 5:
macierz przekształceń 6:
wynikowa macierz przekształceń:
Współrzędne kiści: x = 300 mm y = 0 mm z = 200 mm
Wyszukiwarka
Podobne podstrony:
obliczenia do robota, Automatyka i Robotyka, Semestr 4, Kinematyka i Dynamika Robotów i Manipulatoró
Kinematyka odwrotna, Automatyka i Robotyka, Semestr 4, Kinematyka i Dynamika Robotów i Manipulatorów
robocik, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Projekt2
Interpolacja, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Podstawy stero
mój projekt, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn
Zadanie proste 2, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Podstawy s
mój projekt KB, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn
1 Kinematyka i dynamika robotów i manipulatorów literatur
środowisko, Automatyka i Robotyka, Semestr 2, Ekologia i zarządzanie środowiskiem, mój projekt
1 Kinematyka i dynamika robotów i manipulatorów literatur
Proste zadnie kinematyki, Automatyka i Robotyka, Semestr IV, Kinematyka i dynamika robotów, KIDRIM,
projekt 2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt2-Proste zadanie kinematyki
więcej podobnych podstron