Kinematyka odwrotna
Dane na symbolach ogólnych:
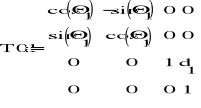
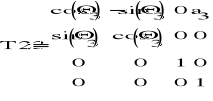
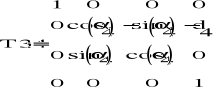
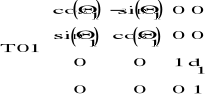
Macierze przekształceń z notacji D-H:
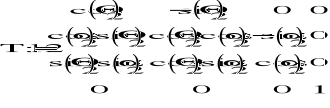
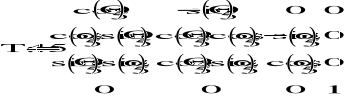
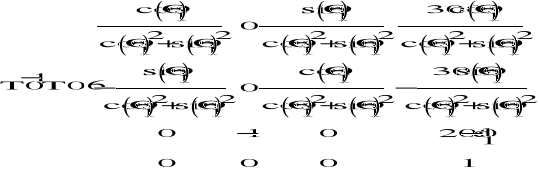
Do kinematyki odwrotnej potrzebna jest również macierz T16:

![]()

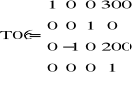
Obliczenia na wartościach liczbowych
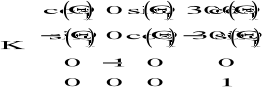
Równanie kinematyki odwrotnej:
T01-1 * T06 = T16
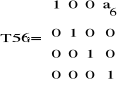
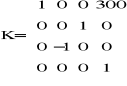
Po podstawieniu znanych wartości d1=200 i uproszczeniach, macierz K przyjmuje następującą postać:
Obliczenia Θ1:
Porównanie współczynników z pozycji [2,3] macierzy K i macierzy T16
![]()
![]()
![]()
czyli arccos(1)= Θ1
Otrzymujemy nieskończoną liczbę rozwiązań spowodowaną okresowością funkcji:
![]()
![]()
gdzie:
Po podstawieniu tych wartości do macierzy K otrzymujemy nową macierz.
Obliczenia Θ2 i Θ5:
porównanie współczynników z pozycji [1,4] macierzy K i macierzy T16
![]()
![]()
czyli:
![]()
porównanie współczynników z pozycji [2,4] macierzy K i macierzy T16
![]()
![]()
równanie sprowadza się do postaci :
0 = 0
porównanie współczynników z pozycji [3,4] macierzy K i macierzy T16
![]()
![]()
czyli:
![]()
Uzyskujemy układ równań
![]()
![]()
Po podstawieniu znanych wartości a3 = 150, a6 = 50, d4 = 100 przyjmuje taką postać:
![]()
![]()
Otrzymujemy nieskończony zbiór rozwiązań, spowodowany okresowością funkcji.
![]()
![]()
![]()
gdzie:
Rozwiązaniami mieszczącymi się w przestrzeni roboczej manipulatora są:
![]()
![]()
![]()
![]()
![]()
![]()
K
Wyszukiwarka
Podobne podstrony:
obliczenia do robota, Automatyka i Robotyka, Semestr 4, Kinematyka i Dynamika Robotów i Manipulatoró
Notacja Denavita, Automatyka i Robotyka, Semestr 4, Kinematyka i Dynamika Robotów i Manipulatorów, p
robocik, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Projekt2
1 Kinematyka i dynamika robotów i manipulatorów literatur
Interpolacja, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Podstawy stero
mój projekt, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn
Zadanie proste 2, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Podstawy s
mój projekt KB, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn
1 Kinematyka i dynamika robotów i manipulatorów literatur
środowisko, Automatyka i Robotyka, Semestr 2, Ekologia i zarządzanie środowiskiem, mój projekt
Proste zadnie kinematyki, Automatyka i Robotyka, Semestr IV, Kinematyka i dynamika robotów, KIDRIM,
projekt 2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt2-Proste zadanie kinematyki
więcej podobnych podstron