Instytut Automatyzacji procesów Technologicznych
i Zintegrowanych Systemów Wytwarzania
Wydział Mechaniczny Technologiczny
Politechnika Śląska w Gliwicach
PODSTAWY STEROWANIA ROBOTÓW I MASZYN
Projekt
INTERPOLACJA
Prowadzący zajęcia:
dr inż. Agnieszka SĘKALA
Opracował:
Mariusz MUCHA, grupa dziekańska: 3, semestr: 1, kierunek: Automatyka i Robotyka
Gliwice, 00. listopad. 2005
Spis treści:
Wprowadzenie do zagadnienia…………………………………………………. 3
Dane do zadania………………………………………………………………… 4
Rozwiązanie zadania……………………………………………………………. 5
Wnioski…………………………………………………………………………. 9
1. Wprowadzenie do zagadnienia
Do wyznaczenia zaprogramowanego kształtu trajektorii służy tzw. interpolator trajektorii, którego zadaniem jest określenie współrzędnych pośrednich toru manipulatora (pomiędzy zadanymi wartościami współrzędnych pozycji początku i końca drogi), inaczej nazywanych pozycjami podporowymi. Pozycje te gwarantują zachowanie odpowiednigo kształtu drogi (toru). Danymi wejściowymi do obliczeń interpolacyjnych są: współrzędne pozycji bieżącej jako pozycji początkowe ruchu interpolowanego, współrzędne pozycji docelowej jako pozycji końca ruchu, kształt toru w przestrzeni rozpiętego pomiędzy pozycją początkową i końcową ruchu oraz prędkość z jaką ma nastąpić przemieszczenie. Rodzaj interpolacji wskazuje według jakiego wzorca matematycznego określającego kształt drogi zostaną określone punkty pośrednie (podporowe). Do podstawowych, stosowanych w sterowaniu robotów, rodzajów interpolacji należy interpolacja liniowa, kołowa (ruch po łuku okręgu) oraz interpolacja TCP. Zadaniem interpolatora jest podział całego odcinka realizowanej drogi pomiędzy pozycją początkową a końcową na etapy zwane sekcjami (wyznaczanymi w stałych odcinkach czasu). Sekcje wyznaczają kolejne punkty podporowe, czyli położenia przez które musi przejść planowana trajektoria, aby żądany kształt toru został osiągnięty. Uzyskiwane na podstawie przeliczeń interpolacyjnych współrzędne pozycji pośrednich są wartościami dyskretnymi, a wszystkie parametry potrzebne do wyliczeń są ustalane dla konkretnych warunków czasu i miejsca. W ten sposób otrzymuje się współrzędne początku i końca poszczególnych sekcji.
2. Dane do zadania
a) rysunki
Rys.1
gdzie:
xp, yp- współrzędne punktu P w kartezjańskim układzie współrzędnych
L- długość prostej
α- kąt nachylenia prostej do osi rzędnych układu współrzędnych
R- promień interpolacji kołowej (po łuku okręgu)
φ- miara kąta rozwarcia łuku (zakres kąta interpolacji)
Rys.2 Rys.3
b)dane liczbowe:
- punkt P: xp=-60, yp=100 - okrąg: R=55, φ=-60°
- prosta L: α=-135°, L=65 - tolerancja: I=0.01, A=0.01
3. Rozwiązanie zadania
a) wyznaczam kąty α oraz β:
![]()
≈0.9998 ⇒ β=arccos(0.9998)≈1.14°
![]()
≈0.9996 ⇒ α=arccos(0.9996)≈1.62°
b) Obliczam ilość punktów podporowych w ruchu interpolowanym po łuku, przy czym do wzoru wstawiam φ=60, wynika to z tego, że znak (minus) informuje jedynie o kierunku łuku zakreślanego przez promień R w układzie współrzędnych (rys.1)
![]()
≈17.8
Ilość punktów podporowych należy zaokrąglić do wartości całkowitej w górę, więc ostatecznie: a=18
c) znając wartość a należy dokonać korekty wartości kąta α:
![]()
≈1.6°
d) ze wstępnej analizy danych zamieszczonych w pkt.2 można już wywnioskować, że kształt toru będzie wyglądał następująco:
Rys.4
Ruch rozpoczyna się w punkcie P i przebiega po linii prostej aż do punktu K- jest to faza ruchu po linii prostej. Następnie rozpoczyna się 2 faza, w której ruch odbywa się w kierunku oznaczonym na rys.4 jako (-φ) po łuku okręgu zakreślanego przez promień R z początku układu współrzędnych (SX'Y').
e) punkt startowy (K) interpolacji kołowej ma współrzędne (0;55) licząc od początku układu współrzędnych SX'Y'.
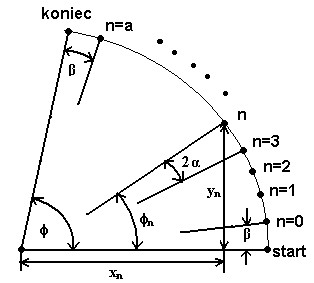
Następnie według następującego algorytmu:
φn=β+n2α
xn=(R+A)*cos(φn)
yn=(R+A)*sin(φn)
gdzie: n - zmienia się w zakresie od 0 do a
φn - zmienia się w zakresie od β do (φ-β)
obliczam współrzędne punktów podporowych interpolacji:
n |
φn |
xn |
yn |
0 |
1.14 |
54.99 |
-1.09 |
1 |
4.34 |
54.85 |
-4.16 |
2 |
7.54 |
54.53 |
-7.21 |
3 |
10.74 |
54.04 |
-10.25 |
4 |
13.94 |
53.38 |
-13.25 |
5 |
17.14 |
52.56 |
-16.21 |
6 |
20.34 |
51.57 |
-19.12 |
7 |
23.54 |
50.43 |
-21.97 |
8 |
26.74 |
49.12 |
-24.75 |
9 |
29.94 |
47.66 |
-27.45 |
10 |
33.14 |
46.06 |
-30.07 |
11 |
36.34 |
44.31 |
-32.59 |
12 |
39.54 |
42.42 |
-35.02 |
13 |
42.74 |
40.4 |
-37.33 |
14 |
45.94 |
38.25 |
-39.53 |
15 |
49.14 |
35.98 |
-41.6 |
16 |
52.34 |
33.61 |
-43.54 |
17 |
55.54 |
31.12 |
-45.35 |
18 |
58.74 |
28.54 |
-47.02 |
tabela 1.
Znak (minus) przy kolejnych wartościach yn wynika z kierunku ruchu (rys.4), aby otrzymać właściwe wartości, należy dokonać symetrii osiowej toru względem osi SX'
Współrzędne punktu końcowego (T) interpolacji obliczam opierając się na rys.2:
xt=(R+A)*cos φ=27.5
yt=(R+A)*sin φ=-47.64
f) wyznaczam współrzędne punktu (K), który jest punktem końcowym ruchu po prostej i jednocześnie punktem początkowym ruchu po łuku okręgu:
Rys.5
β=180°-α=180°-135°=45°
sinβ=Δy/L ⇒ Δy=L*sinβ=65*sin45°=45.96
cosβ=Δx/L ⇒Δx=L*cosβ=65*cos45°=45.96
xk=xp-Δx= -60-45.96= -105.96
yk=yp-Δy= 100-45.96= 54.04
więc ostatecznie punkt startowy (K) ma współrzędne: (-105.96;54.04)
g) otrzymałem różne współrzędne punktu startowego:
z ppkt. (e) wynika, że: K(0;55)
natomiast z ppkt. (f) wynika, że : K(-105.96;54.04)
W rzeczywistości jest to ten sam punkt a jego przesunięcie wynika z faktu, że w ppkt. (e) współrzędne tego punktu zostały obliczone wzgłedem układu SX'Y', a w ppkt. (f) względem układu 0XY. Współrzędne punktów podporowych także zostały wyliczone względem początku układu współrzędnych SX'Y'. W związku z tym aby ustalić ich rzeczywiste położenie należy dokonać translacji współrzędnych (tabela 1)o wartość:
[-105.96-55;54.04-0]=[-160.96;54.04] /co wynika z różnych współrzędnych punktu
startowego (K)/
każdego punktu (xn;yn) na punkt (xn'';yn'') według następującego algorytmu:
(xn'';yn'')=(-160.96+xn;54.04+yn)
h) współrzędne punktów podporowych interpolacji po łuku okręgu liczone względem początku układu współrzędnych 0XY są następujące:
- współrzędne punktu startowego: K(-105.96;54.04)
- współrzędne punktów podporowych:
n |
xn'' |
yn'' |
0 |
-105.97 |
52.95 |
1 |
-106.11 |
49.88 |
2 |
-106.43 |
46.83 |
3 |
-106.92 |
43.79 |
4 |
-107.58 |
40.79 |
5 |
-108.4 |
37.83 |
6 |
-109.39 |
34.92 |
7 |
-110.53 |
32.07 |
8 |
-111.84 |
29.29 |
9 |
-113.3 |
26.59 |
10 |
-114.9 |
23.97 |
11 |
-116.65 |
21.45 |
12 |
-118.54 |
19.02 |
13 |
-120.54 |
16.71 |
14 |
-122.71 |
14.51 |
15 |
-124.98 |
12.44 |
16 |
-127.35 |
10.5 |
17 |
-129.84 |
8.69 |
18 |
-132.42 |
7.02 |
tabela 2
-współrzędne punktu końcowego
(xt'';yt'')=(-160.96+xt;54.04+yt)=(-133.46;6.4)
8
Wyszukiwarka
Podobne podstrony:
interpolacje projekt2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
interpolacja projekt1, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
projekt 2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt2-Proste zadanie kinematyki
projekt 1, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt2-Proste zadanie kinematyki
robocik, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Projekt2
mój projekt, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn
mój projekt KB, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn
Interpolacja, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Podstawy stero
Zadanie proste 2, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Podstawy s
projekt dla rudego, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Projekt
KOMPLET chwytak, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, projekt chwytaka
tsis kolos troche pytan, Automatyka i Robotyka, Semestr 4, Technologia sterowania
PKM - opracowania roznych pytan na egzamin 6, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji
pnom wyklad11, Automatyka i Robotyka, Semestr 1, Podstawy Nauki o materialach, Wyklady
pnom - sciaga, Automatyka i Robotyka, Semestr 1, Podstawy Nauki o materialach, stopy
Pytania 2, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Pytania i pomoce
opracowanie TSS, Automatyka i Robotyka, Semestr 4, Technologia sterowania
tss, Automatyka i Robotyka, Semestr 4, Technologia sterowania
więcej podobnych podstron