5. Metoda parametryczna.
Wyrównanie sieci liniowo-kątowej
5.1. Model zagadnienia wyrównawczego
W metodzie parametrycznej zwanej również metod pośredniczącą wielkości mierzone są funkcją wyznaczanych wielkości (parametrów), czyli
(5.1)
Celem obliczeń jest wyznaczenie wyrównanych wartości liwyr, z których każda różni się od wartości obserwowanej liob o wartość poprawki vi
![]()
dla i <1,n> (5.2)
Po rozpisaniu zależności (5.2) dla wszystkich n wyników pomiarów powstaje układ równań poprawek stanowiący podstawę procesu wyrównawczego. Jeśli w zależnościach (5.1) funkcja F(X1,X2..Xn) ma postać nieliniową, to konieczne jest przekształcenie równań obserwacyjnych za pomocą szeregu Taylora
![]()
,
![]()
(5.3)
Po przekształceniu powstaje układ równań poprawek
![]()
(5.4)
![]()
(5.5)
, ![]()
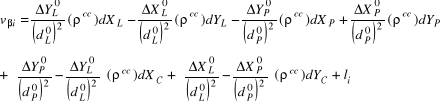
Równanie poprawek kąta poziomego. W przypadku kąta poziomego β funkcja (5.1) zdefiniowana jest przez współrzędne trzech punktów
![]()
![]()
(5.6)
Rys.5.1
Zgodnie z wzorem (5.6) należy wyznaczyć pochodne funkcji β względem wszystkich parametrów występujących we wzorze (9.8), tj. XL, YL, XP, YP, XC, YC. Przykładowo pierwsza pochodna cząstkowa względem XL, ma postać1)

Po obliczeniu wszystkich pochodnych cząstkowych względem poszczególnych współrzędnych postać równania obserwacji kąta poziomego β wynosi
(5.7)
lub w postaci
gdzie ![]()
. (5.8)
Równanie poprawek dla długości odcinka. W przestrzeni dwuwymiarowej odcinek PK zdefiniowany jest jednoznacznie przez współrzędne X,Y jego końców,
![]()
. (5.9)
Rys. 5.2.
Dla wyznaczenia równania poprawek należy przekształcić zależność (5.9) do postaci liniowej. W tym celu należy wyznaczyć pochodne wielkości mierzonej względem poszczególnych parametrów (współrzędnych końców odcinka. W przypadku parametru YK wynosi
![]()
![]()
(5.10)
Uwzględniając azymut analizowanej długości (AzPK), równanie poprawek dla długości d przyjmuje ostatecznie postać
vdPK = cos AzPK(dXK - dXP) + sin AzPK (dYK - dYP) + ld (5.11)
lub
![]()
(5.12)
gdzie
![]()
(5.13)
Równanie poprawek dla różnicy wysokości. Ponieważ różnica wysokości h=F(HK,HP) zapisana jest w postaci liniowej
vi = HK - HP + h (5.14)
stąd równanie poprawek można wyprowadzić bez zastosowania wzoru Taylora.
vi = dHK - dHP + hi (5.15)
5.2. Ocena dokładności
Ocena formułowana jest za pomocą
błędu położenia punktu,
korelacji parametrów,
elipsy ufności,
błędów średnich wyrównanych obserwacji.
Błąd położenia punktu określa formuła
(5.16)
Obszar ufności najpełniej określa elipsa ufności o półosiach (rys.6.2)
![]()
(5.17)
![]()
(5.18)
We wzorach na wartości własne macierzy ၬ1 (5.21) i ၬ2 (5.22) wielkości P są wyznaczane z zależności
![]()
(5.19)
![]()
(5,20)
![]()
(5.21)
![]()
(5.22)
Kąt skręcenia ၪ wyznaczany jest ze wzoru
![]()
(5.23)
Rys. 5.3. Pole elipsy wewnątrz której punkt znajduje się z prawdopodobieństwem ၧ
Wartość F konieczna przy obliczaniu elementów elipsy przyjmowana jest z tablic F-Snedecora dla n - r stopni swobody (n - liczba obserwacji, r - liczba niewiadomych). Najczęściej stosowane wartości F podano w tab. 5.1.
Tablica 5.1
n - r |
ၧ |
|
|
0,95 |
0,99 |
1 2 3 4 |
199.50 19.00 9.55 6.94 |
5000 99.01 30.83 17.99 |
5.3. Algorytm obliczeń
Obliczenia wykonywane są według algorytmu, który oparty jest na metodzie najmniejszych kwadratów. Algorytm jest realizowany w następujących etapach.
Zestawienie wyników obserwacji
Układ równań obserwacyjnych
Równania poprawek
Układ równań normalnych.
Rozwiązanie układu równań normalnych
Wektor poprawek
Wyrównane wartości wielkości obserwowanych
Kontrole obliczeń
Współczynnik wariancji mo2
Macierz kowariancji i błędy średnie wyznaczanych parametrów
Błędy średnie wyrównanych wielkości obserwowanych
Przedział (obszar) ufności, elipsa ufności.
Kontrola 1 polega na porównaniu wartości s = s' obliczonych ze wzorów
s = vT v lub s = vTP v
s' = LT თPთAთX + LT თPთL
W kontroli 2 wartości wyrównane wyliczane są dwoma sposobami
lwyr = lob + v
lwyr = A⋅dX + L0
Proces iteracyjny. Istotną częścią algorytmu jest iteracyjny tryb obliczeń. Model zagadnienia jest nieliniowy, a w algorytmie aproksymacji wykorzystuje się tylko pierwszą pochodną. Wyniki pierwszego rozwiązania są traktowane jako wartości przybliżone i wprowadzone do algorytmu w drugiej iteracji. Obliczenia są prowadzone w pętli programu komputerowego tak długo, aż wartość korekty będzie dostatecznie mała, np. równa 0.1 wyniku uzyskanego w poprzedniej iteracji. Duże znaczenie ma dokładność przybliżonych wartości niewiadomych, punktu startowego obliczeń. Im wartości te są bliższe prawidłowego rozwiązania, tym mniej iteracji trzeba dla uzyskania poprawnego wyniku. Jeśli jednak punkt startowy będzie zbyt odległy, proces iteracyjny może nie dać poprawnego rozwiązania, lub być rozbieżny.
5.4. Przykład wyrównania sieci liniowo-kątowej
Wyrównać elementarną sieć liniowo-kątową przedstawioną na rys. 5.4. Wyniki pomiarów zestawiono w tabl. 5.2. Obliczyć:
współrzędne p.3
błędy średnie wyrównanych obserwacji β1, β2, β3, d1,3, d2,3.
Wyniki pomiarów Tablica 5.2
Wielkość pomierzona |
Wynik pomiaru |
|
β1ob |
69.4555 |
10cc |
β2ob |
73.2860 |
20cc |
β3ob |
57,2635 |
30cc |
d1,3ob |
174.960 |
0.02 m |
d2,3ob |
169.954 |
0.01 m |
Punkt |
X |
Y |
1 |
100.000 |
200.000 |
2 |
100.000 |
350.000 |
Oznaczenie kąta |
Wartość kąta |
Błąd pomiaru |
||
L |
P |
C |
βiob |
mβi- |
3 |
2 |
1 |
69,4555 |
10cc |
1 |
3 |
2 |
73,2860 |
20cc |
2 |
1 |
3 |
57,2635 |
30cc |
Oznaczenie długości |
Długość boku |
Błąd pomiaru |
|
P |
K |
diob |
mdi- |
1 |
3 |
174.960 |
0.020 |
2 |
3 |
169.954 |
0.010 |
Przybliżone wartości niewiadomych - współrzędnych p.3(X30,Y30) oraz wielkości obserwowanych β10, β20, β30, d1,30, d2,30 wyznaczono przyjmując d1,30 = d1,3ob, β10 = β1ob . Na podstawie tak ustalonych współrzędnych wyznaczono następnie wartości d2,30, β20 oraz azymuty Az130 i Az230
X30 |
255.1985 |
|
β10 |
69.4555g |
|
d1,30 |
174.9600 m |
Y30 |
280.7740 |
|
β20 |
73.28628g |
|
d2,30 |
169.9495 m |
|
|
|
β30 |
57,25822g |
|
Az130 |
30.54450g |
|
|
|
|
|
|
Az230 |
373.28628g |
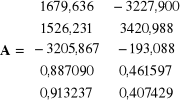
Równania poprawek v = A ⋅dX + L; L = L0 - Lob
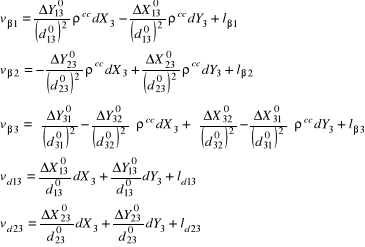
gdzie 
![]()
Macierze występujące w układzie równań normalnych

Jednostki elementów macierzy A, L, P są metryczne i kątowe.
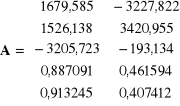
Układ równań normalnych AT P⋅A ⋅dX + AT P⋅L = 0
Rozwiązanie układu równań normalnych dX = - (AT P⋅A)-1AT⋅P⋅L
![]()
![]()
![]()
![]()
Wartości parametrów - wyrównanych współrzędnych pkt.3 X = X0 + dX
X3 = 255,20544 - 0,00415 = 255,20129
Y3 = 280,76059-0,00172 = 280,75887
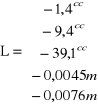
Wektor poprawek v = A⋅dX + L
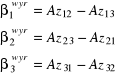
Wyrównane wartości wielkości obserwowanych βiwyr = βiob + vi
diwyr = diob + vi
Wielkość pomierzona |
Wynik pomiaru |
Poprawka v |
Wartości wyrównane |
β1 |
69.4555g |
-1,4cc |
69.4554g |
β2 |
73.2860g |
-9,4cc |
73.2851g |
β3 |
57,2635g |
-39,2 cc |
57,2596 |
d1,3 |
174.960 m |
-0,0045 m |
174.9555 m |
d2,3 |
169.954 m |
-0,0076 m |
169.9464 m |
Kontrola 1 vT P⋅v = LT თP⋅AთdX + LTთP⋅L
2,575729 = 2,575729
Kontrola 2. Obliczenie wyrównanych wartości obserwacji na podstawie wyrówna-nych współrzędnych. W tym celu należy wyznaczyć azymuty Az12, Az13, Az23
X30 |
255,2013 |
|
β1wyr |
69.45535g |
Y30 |
280,7589 |
|
β2wyr |
73.28507g |
Az12wyr |
100.0000g |
|
β3wyr |
57.25958g |
Az13wyr |
30.54465g |
|
d1,3wyr |
174.9555 m |
Az23wyr |
373.28507g |
|
d2,3wyr |
169.9464 m |
Wartości wyrównane obliczone dwoma sposobami są identyczne.
II iteracja
Jako przybliżone wartości niewiadomych - współrzędnych p.3(X30,Y30) oraz wielkości obserwowanych β10, β20, β30, d1,30, d2,30 przyjmujemy wyniki I iteracji.
X30 |
255,2013 |
|
β10 |
69.4554g |
Y30 |
280,7589 |
|
β20 |
73.2851g |
|
|
|
β30 |
57,2596 g |
|
|
|
d1,30 |
174.9555m |
|
|
|
d2,30 |
169.9464m |
Układ równań normalnych AT P⋅A ⋅dX + AT P⋅L = 0
Rozwiązanie układu równań normalnych dX = - (AT P⋅A)-1AT⋅P⋅L
![]()
![]()
![]()
![]()
Wartości parametrów - wyrównanych współrzędnych pkt.3. X = X0 + dX
X3 = 255,20129 + 0,00170 = 255,20298
Y3 = 280,75887+ 0,00035 = 280,75922
Uzyskany wynik różni się od rezultatu I iteracji o 1.7 mm w przypadku X3 oraz 0.3 mm dla Y3. Dla uzyskania poprawnego wyniku należy wykonać trzecią iterację. Ponieważ poprawki w II iteracji są 4-5 razy mniejsze niż w I iteracji, należy oczekiwać, że w III iteracji poprawki wyniosą kilka dziesiątych milimetra.
Wektor poprawek v = A⋅dX + L
Wielkość pomierzona |
Wynik pomiaru |
Poprawka v |
Wartości wyrównane |
β1 |
69.4555g |
-1.4cc |
69.4554g |
β2 |
73.2860g |
-9.4cc |
73.2851g |
β3 |
57.2635g |
-39.2 cc |
57.2596g |
d1,3 |
174.960 m |
-0,0045 m |
174.9555 m |
d2,3 |
169.954 m |
-0,0076 m |
169.9464 m |
Kontrola obliczeń 1 vT P⋅v = LT თAთdX + LTთP⋅L
2,575729 = 2,575729
Kontrola obliczeń 2. Obliczenie wyrównanych wartości obserwacji na podstawie
wyrównanych współrzędnych
|
X |
Y |
|
β1wyr |
69.4554g |
1 |
100.000 |
200.000 |
|
β2wyr |
73.2851g |
2 |
100.000 |
350.000 |
|
β3wyr |
57.2596 |
3 |
255.2065 |
280.7654 |
|
d1-3wyr |
174.9555 m |
|
|
|
|
d2-3wyr |
169.9464 m |
ANALIZA DOKŁADNOŚCI
Współczynnik wariancji mo2 ![]()
![]()
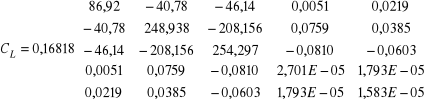
Macierz kowariancji ![]()
![]()
Błędy średnie wyznaczanych parametrów ![]()
![]()
![]()
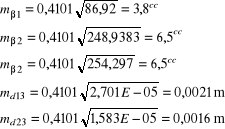
Błędy średnie wyrównanych obserwacji ![]()
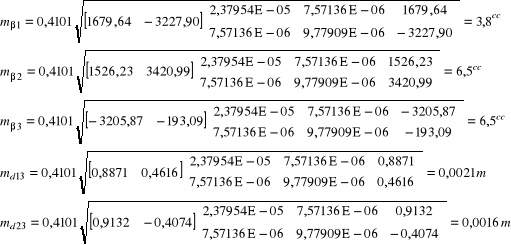
Wyznaczenie błędów średnich wyrównanych obserwacji za pomocą
ich macierzy kowariancji. ![]()
Elipsa błędów, półosie a, b
![]()
![]()
Δ = 13843444328 ![]()
λ1 = 36894,66 ![]()
λ2 = 154552,83 ![]()
a = 0,0093 ![]()
b = 0,0046 ![]()
ϕ = 26,23g ![]()
Rys. 5.5. Elipsa błędów punktu 3 dla prawdopodobieństwa γ = 95%
37
2
1
X
β1
Y
3
β2
d13
d23
Rys. 5.4
β3
C(XC,YC)
P(XP,YP)
L(XL,YL)
X
AzL
AzP
dP
dL
β
K
P
X
AzPK
Y
Y'
ၪ
b
a
X'
Y'
Y
X
X
Y
X'
a
b
ၪ
Y'
Wyszukiwarka
Podobne podstrony:
4.Metoda parametryczna. Sieć niwelacyjna, Geodezja, rachunek wyrówmawczy
2.Elementy teorii błedów, Geodezja, rachunek wyrówmawczy
1.Algebra macierzy, Geodezja, rachunek wyrówmawczy
7.Metody mieszane, Geodezja, rachunek wyrówmawczy
3.Wyrównanie obserwacji bezpośrednich, Geodezja, rachunek wyrówmawczy
Pomiar sytuacyjny metodą domiarów prostokątnych, uczelnia, BL, Geodezja, zagadnienia z geodezji
Słowniczek ważniejszych terminów z RW, Geodezja, Rachunek wyrównawczy, Materiały egzamin
Prezentacja liniowa i powierzchniowa, TECHNIK RACHUNKOWOŚCI, statystyka
zadania z rachunku, Geodezja, Rachunek wyrównawczy, Materiały egzamin
rachunek zadania z egzaminu, Geodezja, Rachunek wyrównawczy, Materiały egzamin
sieć liniowa rw7
rachunek zadania zebrane w całosc, Geodezja, Rachunek wyrównawczy, Materiały egzamin
Geodezja rachunek współrzęnych
rw9 liniowo katowa karolina
rw9 liniowo katowa karolina
rw9 liniowo katowa
rw9 liniowo katowa moje
więcej podobnych podstron