4. Metoda parametryczna
Wyrównanie sieci niwelacyjnej
4.1. Model zagadnienia wyrównawczego
W metodzie parametrycznej zwanej również metodą pośredniczącą wielkości podlegające pomiarowi są funkcją wyznaczanych wielkości (parametrów), czyli
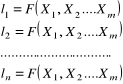
. (4.1)
Parametrami Xi są współrzędne X,Y,H, a wielkościami obserwowanymi „l” kąty, odległości i różnice wysokości. Wartości obserwowane lob różnią się o poprawkę vi od wartości poprawnej, którą jest wartość wyrównana lwyr (w rzeczywistości najbardziej prawdopodobna)
![]()
. (4.2)
Wartości obserwowane liob oraz lwyr są zestawiane w układzie „n” równań poprawek
![]()
, (4.3)
w którym wartości wyrównane lwyr są wyrażone w postaci funkcji parametrów Xi
![]()
.
![]()
(4.4)
Przy wyrównaniu sieci niwelacyjnych ze względów (rachunkowych) przyjmuje się

(4.5)
Stąd
![]()
. (4.6)
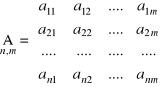
W zapisie macierzowym układ (4.6) zapisujemy jako
![]()
, (4.7)



(4.8)
4.2. Metoda najmniejszych kwadratów. Układ równań normalnych
Dla rozwiązania układu równań (4.7) konieczne jest takie jego przekształcenie, by liczba równań równała się liczbie niewiadomych. Najbardziej powszechnym, a w geodezji praktycznie jedynym sposobem rozwiązania tego problemu, jest wprowadzenie założenia dotyczącego sumy kwadratów poprawek v:
F = Σv2 = vT v = min (4.9)
Efekt przekształcenia łatwo zilustrować przykładem, w którym na podstawie zbioru danych {hi, xi} wyznaczane są parametry a, b równania prostej h = ax + b. Podstawiając wartości poprawek v = ax + b - h do równania (4.9) i przyrównując pochodne (względem szukanych niewiadomych a i b) otrzymanego wyrażenia do zera, wyznaczane są dwa równania normalne. Można je zapisać w ogólnej postaci
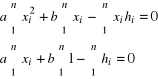
(4.10)
albo macierzowo:
ATA X + ATL = 0 (4.11)
W przypadku, gdy obserwacje wykonane są z różną dokładnością, w równaniach poprawek (4.7) oraz równaniach normalnych (4.10) uwzględnia się macierz wag w postaci
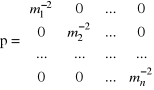
co przekształca układ równań (4.11) do postaci
AT P A X + AT P L = 0 (4.12)
Aby rozwiązać powstały układ należy pomnożyć obie strony równania odpowiednio przez (ATA)-1 lub (ATPA) -1
(ATA)-1 ATA X = - (ATA)-1 ATL
Stąd
X = - (ATA)-1ATL (4.13)
W przypadku obserwacji o różnych dokładnościach
X = - (AT P A) -1AT P L (4.14)
W zadaniu jak powyższe (tj. zapisanym równaniami liniowymi) wartości parametrów otrzymane przy rozwiązaniu układu równań normalnych są wynikami końcowymi. Można bowiem przyjąć, że wartości przybliżone są równe zero. Gdy układ równań jest nieliniowy, uzyskuje się tylko korekty dX do wcześniej przyjętych wartości przybliżonych bowiem zgodnie z (4.5)
X = X0 + dX
Procedurę obliczeń powtarza się w procesie iteracyjnym tak długo, aż wartości dX będą odpowiednio małe.
Uwaga na znak „±”! Jeśli układ równań normalnych (4.11) zapisano w postaci
ATA X = ATL
a w przypadku obserwacji różnodokładnych jako
AT P A X = AT P L,
to wektor niewiadomych X jest wyznaczany z zależności
X = (ATA)-1ATL (4.15)
X = (AT P A) -1AT P L (4.16)
Ocena dokładności. Po rozwiązaniu układu równań ![]()
wyznaczany jest współczynnik wariancji mo2
![]()
(4.17)
Gdy wagi wszystkich obserwacji są jednakowe, zachodzi
(4.18)
![]()
(4.19)
Macierz kowariancji
![]()
(4.20)
![]()
(4.21)
Błędy średnie parametrów X1, X2, ...Xi
![]()
,
..........
![]()
(4.22)
Błędy średnie wyrównanych wielkości obserwowanych. Błędy średnie obserwacji można wyznaczyć dwoma sposobami. W pierwszym wykorzystuje się prawo przenoszenia się błędów
![]()
(4.23)
gdzie:
Drugi sposób wyznaczenia błędów średnich wyrównanych obserwacji wymaga wyznaczenia ich macierzy kowariancji
![]()
(4.24)
![]()
4.3. Algorytm obliczeń
Obliczenia wykonywane są według algorytmu, który oparty jest na metodzie najmniejszych kwadratów. Algorytm jest realizowany w następujących etapach.
Zestawienie wyników obserwacji
Układ równań obserwacyjnych
Równania poprawek
Układ równań normalnych.
Rozwiązanie układu równań normalnych
Wektor poprawek
Wyrównane wartości wielkości obserwowanych
Kontrole obliczeń
Współczynnik wariancji mo2
Macierz kowariancji i błędy średnie wyznaczanych parametrów
Błędy średnie wyrównanych wielkości obserwowanych
Przedziały ufności
Kontrola 1 polega na porównaniu wartości s = s' obliczonych ze wzorów
s = vT v lub s = vTP v
s' = LT თPთAთX + LT თPთL
Kontrola 2. Wartości wyrównane obserwacji hiwyr mogą być wyznaczone dwoma sposobami, a mianowicie wzorem (4.2)
lwyr = liobs + vi
oraz z funkcji parametrów X za pomocą formuły
lwyr = A⋅X
W przypadku sieci niwelacyjnej będą to wzory
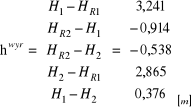
hwyr = hobs + v
hwyr = A⋅H = A⋅dH + L0
Wyniki powinny być identyczne.
4.4. Przykład wyrównania sieci niwelacyjnej
Dla sieci jak na rys. 4.1 wyniki pomiarów różnic wysokości hi zestawiono w tablicy 4.1. Obliczyć:
rzędne reperów H1, H2,
błędy średnie wyrównanych wysokości H1, H2,
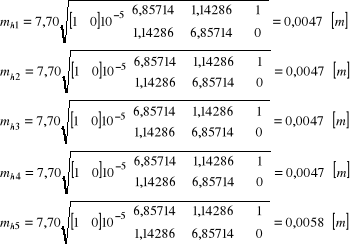
błędy średnie wyrównanych przewyższeń mh1, mh2, mh3, mh4, mh5.
Rys.4.1
Tablica 4.1
|
hiob |
mi |
h1ob |
3,241 |
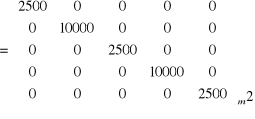
0,02 |
h2ob |
- 0,901 |
0,01 |
h3ob |
- 0,540 |
0,02 |
h4ob |
2,865 |
0,01 |
h5ob |
0,355 |
0,02 |
Macierz wag P
W algorytmie wprowadzono wartości przybliżone niewiadomych H10, H20.
H10 = HRp.1+ h1ob = 112,455 + 3,241 = 115,696
H20 = HRp.1+ h4ob = 112,455 + 2,865 = 115,320
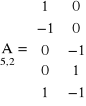
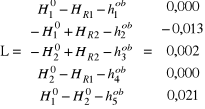
Równania poprawek vi = hi + hiob
v = A ⋅dH + L
v1 = dH1 + H10 - HR1 - h1ob
v2 = - dH1 - H10 + HR2 - h2ob
v3 = - dH2 - H20 + HR2 - h3ob
v4 = dH2 + H20 - HR1 - h4ob
v5 = dH1 - dH2 + H10 - H20 - h5ob

![]()
Układ równań normalnych ATA ⋅dH + ATL = 0
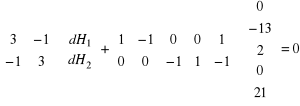
![]()
Rozwiązanie układu równań normalnych dH = - (AT P A)-1AT PL
![]()
![]()
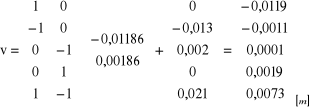
Wektor poprawek
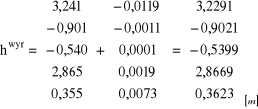
Wyrównane wartości wielkości obserwowanych hwyr = hobs + v
Kontrola obliczeń 1. s = vT P v
s' = LT თP·AთdH + LTთP·L
![]()
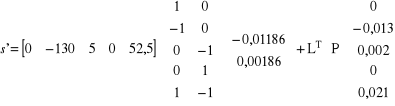
s' = -2,270714286+ 2,8025 = 0,531786
Kontrola 2. hiwyr = F(H1, H2)
Wartości hiwyr są identyczne jak w pozycji „wyrównane wartości wielkości obserwowanych” gdzie zastosowano wzór hiwyr = hiobs + vi
Współczynnik wariancji mo2 ![]()
![]()
m0 = 0,52 (wartość m0 - niemianowana)
Macierz kowariancji ![]()
![]()
Błędy średnie wyznaczanych parametrów ![]()
![]()
![]()
Błędy średnie wyrównanych obserwacji ![]()
27
h5
h4
h3
h2
h1
1
2
Rp. 2
Rp. 1
Rzędne reperów nawiązania
HRp.1 = 112,455
HRp.2 = 114,782
a1
an
Wyszukiwarka
Podobne podstrony:
5.Metoda Param.Sieć Liniowo-kątowa, Geodezja, rachunek wyrówmawczy
2.Elementy teorii błedów, Geodezja, rachunek wyrówmawczy
1.Algebra macierzy, Geodezja, rachunek wyrówmawczy
7.Metody mieszane, Geodezja, rachunek wyrówmawczy
3.Wyrównanie obserwacji bezpośrednich, Geodezja, rachunek wyrówmawczy
Formuła do obliczenia sprawka 1 z rachunku Wyrownanie sieci niwelacyjnej metoda parametryczna (na 8
Formuła do obliczenia sprawka 1 z rachunku Wyrownanie sieci niwelacyjnej metoda parametryczna (na 1
Sprawozdanie techniczne - Budowa niwelatora, geodezja, ćwiczenia
Słowniczek ważniejszych terminów z RW, Geodezja, Rachunek wyrównawczy, Materiały egzamin
Pomiary niwelacyjne, Geodezja, Niwelacja
zadania z rachunku, Geodezja, Rachunek wyrównawczy, Materiały egzamin
Pomiar szczegółów sytuacyjnych metodą ortogonalną, uczelnia, BL, Geodezja, zagadnienia z geodezji
Błędy niwelacji, Geodezja i kartografia, Podstawy Geodezji
Teodolit. Pomiar kątów poziomych metodą kąta pojedynczego i metoda kierunkową.2, uczelnia, BL, Geode
Geodezja - Rektyfikacja Niwelatora, Geodezja
sciaga wejsciowka nr 3 (metoda parametryczna wyrownywania ciagu)
rachunek zadania z egzaminu, Geodezja, Rachunek wyrównawczy, Materiały egzamin
więcej podobnych podstron