3. Wyrównanie obserwacji bezpośrednich
Propagacja błędów
3.1. Wyrównanie obserwacji bezpośrednich
Wyrównanie obserwacji zbioru![]()
obejmuje wyznaczenie wartości przeciętnych oraz błędów standardowych.
Przykład 3.1. Różnicę wysokości ΔhAB pomierzono 4 razy z jednakową dokładnością. Wyznaczyć wartość średnią, błąd średni pojedynczej obserwacji i błąd średni wartości przeciętnej.

lśr = 1.473 vi = lśr - li 
Błąd średni pojedynczej obserwacji wynosi
m =
Błąd średni wartości przeciętnej
mśr = 0.003 mm
Interpretacja błędów
l1 = 1.474 ± 0.006 ს1.468, 1.480ჱ
l2 = 1.470 ± 0.006 ს1.464, 1.476ჱ
l3 = 1.475 ± 0.006 ს1.469, 1.481ჱ
l4 = 1.473 ± 0.006 ს1.467, 1.469ჱ
L = 1.473 ± 0.003 ს1.470, 1.476ჱ
Błąd standardowy średniej arytmetycznej
![]()
![]()
Na podstawie prawa przenoszenia błędów można przyjąć, że


![]()
![]()
![]()
Wyrównanie obserwacji bezpośrednich niejednakowo dokładnych
![]()

![]()
![]()
![]()
Przykład 3.2. Różnicę wysokości ΔhAB pomierzono 4 razy. Każdy pomiar wykonano innym instrumentem z różną dokładnością (m). Wyznaczyć wartość najprawdopodobniejszą, błąd średni wartości przeciętnej mśr i błędy średnie poszczególnych obserwacji mii.


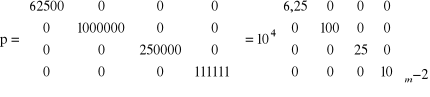
![]()
=
![]()

vTpv = 5,8389
![]()
- wartość niemianowana
Błąd średni wartości przeciętnej mśr
![]()
Błędy średnie obserwacji mi.

3.2. Propagacja błędów pomiaru
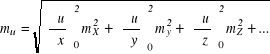
W większości zadań geodezyjnych poszukiwane wartości wyznaczane są pośrednio ze związku funkcyjnego u = f(x,y,z…), w którym bezpośrednio mierzone są wielkości x, y, z. Jeśli wielkości mierzone bezpośrednio są losowe i znane są parametry ich rozkładów normalnych (wartości przeciętne i błędy średnie), to błąd średni mu można wyznaczyć za pomocą prawa przenoszenia się błędów.
![]()
(3.1)
Δx = x - x0, Δy = y - y0, Δz = z - z0.
![]()
(3.2)
Bląd standardowy mu wyznaczany jest ze wzoru
(3.3)
Wzór (3.4) jest poprawny pod warunkiem, że zmienne x,y,z,… są losowe i nieskorelowane, czyli wzajemnie niezależne. W przypadku, gdy ten ostatni warunek nie jest spełniony prawo przenoszenia się błędów wymaga uwzględnienia ich korelacji co jest uwzględniane za pomocą macierzy kowariancji.
Przykład 3.3. Współrzędne punktu 1 wyznaczono metodą biegunową ze stanowiska B w nawiązaniu do punktu osnowy A, jak na rys. 3.2. Obliczyć błędy standardowe mX1, mY1 punktu 1 dla danych:
Azumut AzBA = 165.88g , mBA= 0.02g
β = 72.40g , mβ = 0.01g
l = 87.10 m, ml = 0.02g
mXB = 0.06 m , mY1 = 0.04 m
Współrzędne punktu 1 wyznaczane są z zależności:
![]()
![]()
![]()
![]()
Na podstawie prawa propagacji błędów losowych błędy standardowe wyznaczane są z zależności:
![]()
Uwzględniając w powyższych zależnościach, że
![]()
![]()
oraz wyrażając błędy standardowe kąta β oraz wyznaczonych azymutów, tj. AzB1, AzBA, AzB1 w jednostkach łukowych (w zadaniu podano je w jednostkach gradowych)
![]()
wzory na mX1, mY1 przyjmują postać
![]()
![]()
Podstawiając do powyższych wzorów dane liczbowe otrzymujemy
![]()
![]()
Szukane wartości błędów standardowych współrzędnych punktu 1 wynoszą:
mX1 = 0.07 [m]
mY1 = 0.05 [m]
3.3. Optymalizacja programu obserwacji
Prawo przenoszenia się błędów jest wykorzystywane pry projektowaniu pomiaru. Zadanie polega na dopasowaniu błędów składowych tak, by ich suma wyznaczona z prawa przenoszenia się błędów nie przekroczyła przyjętej wartości.
Przykład 3.4. Z jaką dokładnością należy wykonać pomiary zbiornika o wymiarach (przybliżonych) h = 12 m i promieniu R = 8 m, aby jego kubaturę wyznaczyć z błędem standardowym mV = 0,1%.
Ponieważ kubatura zbiornika w przybliżeniu wynosi V = π R2 h = 2400 m3, stąd oczekiwany błąd standardowy wynosi mV ၀ 2,5 m3. Przyjmując, że promień walca zostanie wyznaczony na podstawie pomiaru obwodu zbiornika, tj. ze wzoru R = L/π, objętość obliczyć można ze wzoru
![]()
Stosując prawo przenoszenia się błędów
i podstawiając L = 2πR oraz mL = mh = m otrzymujemy
![]()
.
Stąd szukana dokładność pomiaru m wynosi
![]()
![]()
0,14 [m]
20
Rys. 3.2
A º

º 1
l
B º
β
Wyszukiwarka
Podobne podstrony:
Z Wyrównanie obserwacji bezpośrednich, Geodezja i Kartografia, Rachunek Wyrównawczy
4.Metoda parametryczna. Sieć niwelacyjna, Geodezja, rachunek wyrówmawczy
2.Elementy teorii błedów, Geodezja, rachunek wyrówmawczy
1.Algebra macierzy, Geodezja, rachunek wyrówmawczy
7.Metody mieszane, Geodezja, rachunek wyrówmawczy
5.Metoda Param.Sieć Liniowo-kątowa, Geodezja, rachunek wyrówmawczy
S 6 Spostrzeżenia bezpośrednie, Geodezja i Kartografia, Rachunek Wyrównawczy
S 6 Wyrównanie spostrzeżeń bezpośrednich jednakowo dokładnych, Geodezja i Kartografia, Rachunek Wyró
Słowniczek ważniejszych terminów z RW, Geodezja, Rachunek wyrównawczy, Materiały egzamin
zadania z rachunku, Geodezja, Rachunek wyrównawczy, Materiały egzamin
rachunek zadania z egzaminu, Geodezja, Rachunek wyrównawczy, Materiały egzamin
rachunek zadania zebrane w całosc, Geodezja, Rachunek wyrównawczy, Materiały egzamin
Elementy rachunku wyrównawczego, uczelnia, BL, Geodezja, zagadnienia z geodezji
WYTYCZNE TECHNICZNE K-1.3 (1981 - Opracowanie pierworysu z pomiarów bezpośrednich), geodezja, Prawo
Dane bezposrednie, Geodezja, Kartografia, Sciagi
ściągi wyższa, ŚCIĄGA 12, REDUKCJE OBSERWACJI ASTRONOMICZNYCH I GEODEZYJNYCH NA GEOIDĘ I ELIPSOIDĘ
Geodezja rachunek współrzęnych
S 7 Równania obserwacji 3, Geodezja i Kartografia, Rachunek Wyrównawczy
S 7 Równania obserwacji 4, Geodezja i Kartografia, Rachunek Wyrównawczy
więcej podobnych podstron