2tom206
5. MASZYNY ELEKTRYCZNE 414
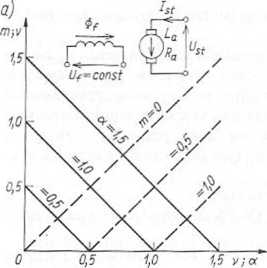
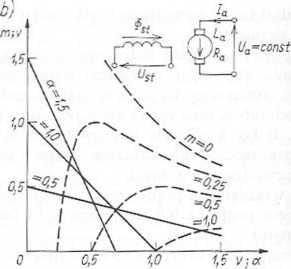
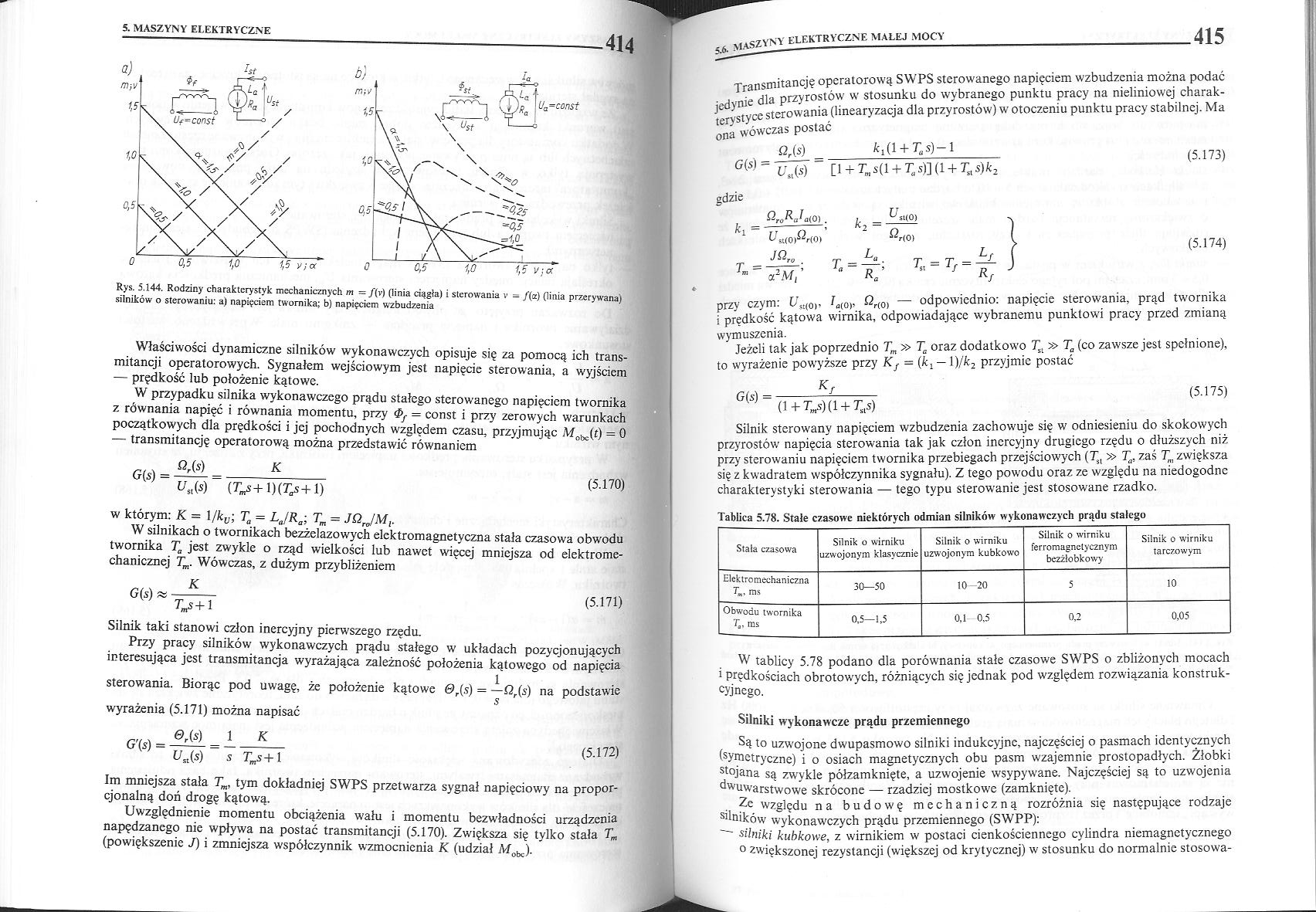
Rys. 5.144. Rodziny charakterystyk mechanicznych m = /(v) (linia ciągła) i sterowania v - /(a) (linia przerywana) silników o sterowaniu: a) napięciem twomika; b) napięciem wzbudzenia
Właściwości dynamiczne silników wykonawczych opisuje się za pomocą ich trans-mitancji operatorowych. Sygnałem wejściowym jest napięcie sterowania, a wyjściem
— prędkość lub położenie kątowe.
W przypadku silnika wykonawczego prądu stałego sterowanego napięciem twomika z równania napięć i równania momentu, przy <Pf = const i przy zerowych warunkach początkowych dla prędkości i jej pochodnych względem czasu, przyjmując Mobc(t) = 0
— transmitancję operatorową można przedstawić równaniem
(5.170)
<*)-*»-_*_
t/s,(S) (Tms+1)(7>+1)
w którym: K = \/kv; T„ = LJRa; Tm = JQJMV
W silnikach o twornikach bezżelazowych elektromagnetyczna stała czasowa obwodu twornika Ta jest zwykle o rząd wielkości lub nawet więcej mniejsza od elektromechanicznej Tm. Wówczas, z dużym przybliżeniem
K
(5.171)
Silnik taki stanowi człon inercyjny pierwszego rzędu.
Przy pracy silników wykonawczych prądu stałego w układach pozycjonujących interesująca jest transmitancja wyrażająca zależność położenia kątowego od napięcia
sterowania. Biorąc pod uwagę, że położenie kątowe 0r(s) = — Qr(s) na podstawie
s
wyrażenia (5.171) można napisać
1 K s r„5+i
(5.172)
Im mniejsza stała Tm, tym dokładniej SWPS przetwarza sygnał napięciowy na proporcjonalną doń drogę kątową.
Uwzględnienie momentu obciążenia wału i momentu bezwładności urządzenia napędzanego nie wpływa na postać transmitancji (5.170). Zwiększa się tylko stała Tm (powiększenie J) i zmniejsza współczynnik wzmocnienia K (udział Mobc).
Transmitancję operatorową SWPS sterowanego napięciem wzbudzenia można podać jedynie dla przyrostów w stosunku do wybranego punktu pracy na nieliniowej charakterystyce sterowania (linearyzacja dla przyrostów) w otoczeniu punktu pracy stabilnej. Ma ona wówczas postać
(5.173)
_ k,(i + rcs)-l
G(5‘ Uu(s) [1 + 7X1 + T„ s)] (1 + 7], s)k2
gdzie
d-yK-JalO) .
L st(0)"r(0)
(5.174)
przy czym: UM0), IM0), Or(0l — odpowiednio: napięcie sterowania, prąd twomika i prędkość kątowa wirnika, odpowiadające wybranemu punktowi pracy przed zmianą wymuszenia.
Jeżeli tak jak poprzednio Tm » Ta oraz dodatkowo Ta » Ta (co zawsze jest spełnione), to wyrażenie powyższe przy Kf = (kl — 1 )jk2 przyjmie postać
Kf
(i+r„s)(i + r5ls)
(5.175)
Silnik sterowany napięciem wzbudzenia zachowuje się w odniesieniu do skokowych przyrostów napięcia sterowania tak jak człon inercyjny drugiego rzędu o dłuższych niż przy sterowaniu napięciem twomika przebiegach przejściowych (Tst » Ta, zaś Tm zwiększa się z kwadratem współczynnika sygnału). Z tego powrodu oraz ze względu na niedogodne charakterystyki sterowania — tego typu sterowanie jest stosowane rzadko.
Tablica 5.78. Stałe czasowe niektórych odmian silników wykonawczych prądu stałego
|
Stała czasowa |
Silnik o wirniku uzwojonym klasycznie |
Silnik o wirniku uzwojonym kubkowo |
Silnik o wirniku ferromagnetycznym bezżłobkowy |
Silnik o wirniku tarczowym |
|
Elektromechaniczna T„, ms |
30—50 |
10 20 |
5 |
10 |
|
Obwodu twornika Ta, ms |
0,5—1,5 |
0,1 0.5 |
0,2 |
0,05 |
W tablicy 5.78 podano dla porównania stałe czasowe SWPS o zbliżonych mocach ■ Prędkościach obrotowych, różniących się jednak pod względem rozwiązania konstrukcyjnego.
Silniki wykonawcze prądu przemiennego
Są to uzwojone dwupasmowo silniki indukcyjne, najczęściej o pasmach identycznych (symetryczne) i o osiach magnetycznych obu pasm wzajemnie prostopadłych. Żłobki stojana są zwykle półzamknięte, a uzwojenie wsypywane. Najczęściej są to uzwojenia dwuwarstwowe skrócone — rzadziej mostkowe (zamknięte).
Ze względu na budowę mechaniczną rozróżnia się następujące rodzaje s'lników wykonawczych prądu przemiennego (SWPP):
~~ silniki kubkowe, z wirnikiem w postaci cienkościennego cylindra niemagnetycznego ° zwiększonej rezystancji (większej od krytycznej) w stosunku do normalnie stosowa-
Wyszukiwarka
Podobne podstrony:
2tom209 5. MASZYNY ELEKTRYCZNE 420 Rys. 5.150. Charakterystyki mechaniczne (a) i sterowania (b):_amp
2tom201 5. MASZYNY ELEKTRYCZNE 404 Rys. 5.137. Zasada konstrukcji podstawowych odmian prądnic tachom
Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2012 (94) Rys. 2. Przeliczenie rodziny charakterystyk
2tom203 5. MASZYNY ELEKTRYCZNE 408 5. MASZYNY ELEKTRYCZNE 408 O % »ii v Rys. 5.138. Charakterystyka
2tom152 5. MASZYNY ELEKTRYCZNE 306 Rys. 5.45. Charakterystyki kątowe maszyny z cylindrycznym wirniki
2tom183 5. MASZYNY ELEKTRYCZNE 368 Rys. 5.103. Charakterystyka zewnętrzna U = /(/) prądnicy 1 obcowz
2tom208 5. MASZYNY ELEKTRYCZNE 418 Sterowanie amplitudowe (rys. 5.147) polega na zmianie amplitudy n
Ugs=-1V Ugs=-2V Ugs=-3V Ugs=-4V 9U 16 Rys. 16. Rodzina charakterystyk wyjściowych
2tom207 5. MASZYNY ELEKTRYCZNE 416 nych materiałów strony wtórnej; wirnik jest umieszczony między uż
24 luty 07 (142) Rys. 3.134. Modyfikacja charakterystyki mechanicznej silnika napędowego zredukowane
2tom204 5. MASZYNY ELEKTRYCZNE 410 z cyfrowymi układami sterowania, miernikami cyfrowymi, mikroproce
2tom124 5. MASZYNY ELEKTRYCZNE 250 5. MASZYNY ELEKTRYCZNE 250 Rys. 5.8. Schemat zastępczy maszyny in
2tom130 5. MASZYNY ELEKTRYCZNE 262 Rys. 5.16. Stopień obciążenia kp silnika w zależności od względne
2tom149 5. MASZYNY ELEKTRYCZNE 300 Rys. 5.38. Schemat połączeń uzwojeń indukcyjnego regulatora
2tom156 S. MASZYNY ELEKTRYCZNE 314 S. MASZYNY ELEKTRYCZNE 314 Rys. 5.51. Układ wzbudzenia turbogener
2tom159 5. MASZYNY ELEKTRYCZNE 320 5. MASZYNY ELEKTRYCZNE 320 Rys. 5.62. Wyznaczanie prądu wzbudzeni
2tom190 5. MASZYNY ELEKTRYCZNE 382 Rys. 5.113. Układ połączeń silnika bocznikowego Rys. 5.114. Kszta
2tom192 5. MASZYNY ELEKTRYCZNE 386 Rys. 5.119. Sposoby magnesowania magnesów segmentowych i pierście
więcej podobnych podstron