Slajd47 (16)
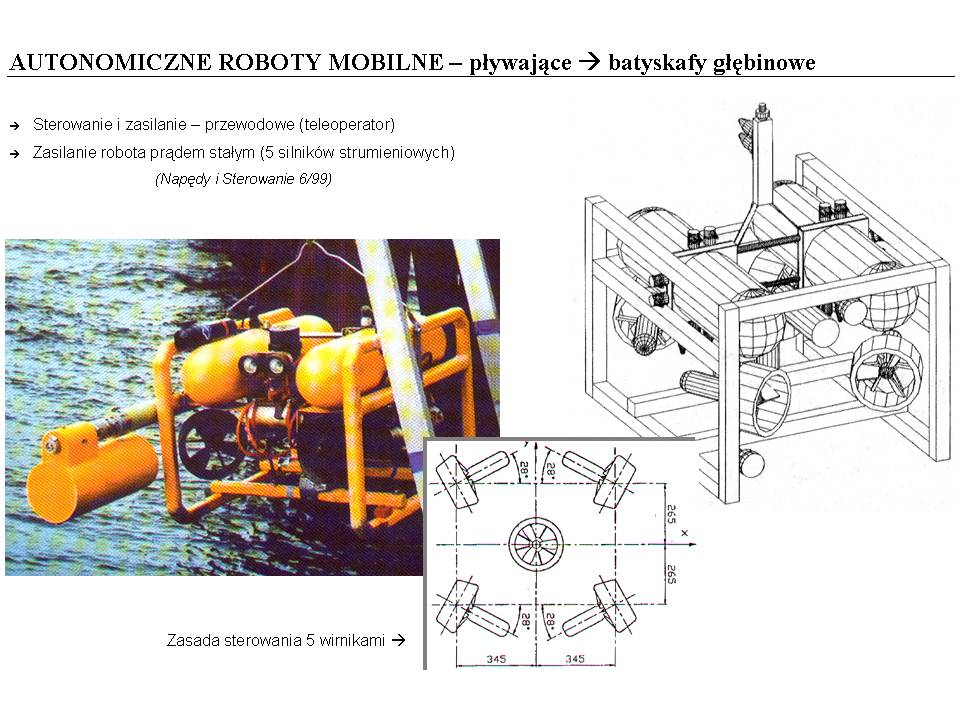
AUTONOMICZNE ROBOTY MOBILNE - pływające -> batyskafy głębinowe
Sterowanie i zasilanie - przewodowe (teleoperator) Zasilanie robota prądem stałym (5 silników strumieniowych) (Napędy i Sterowanie 6/99)
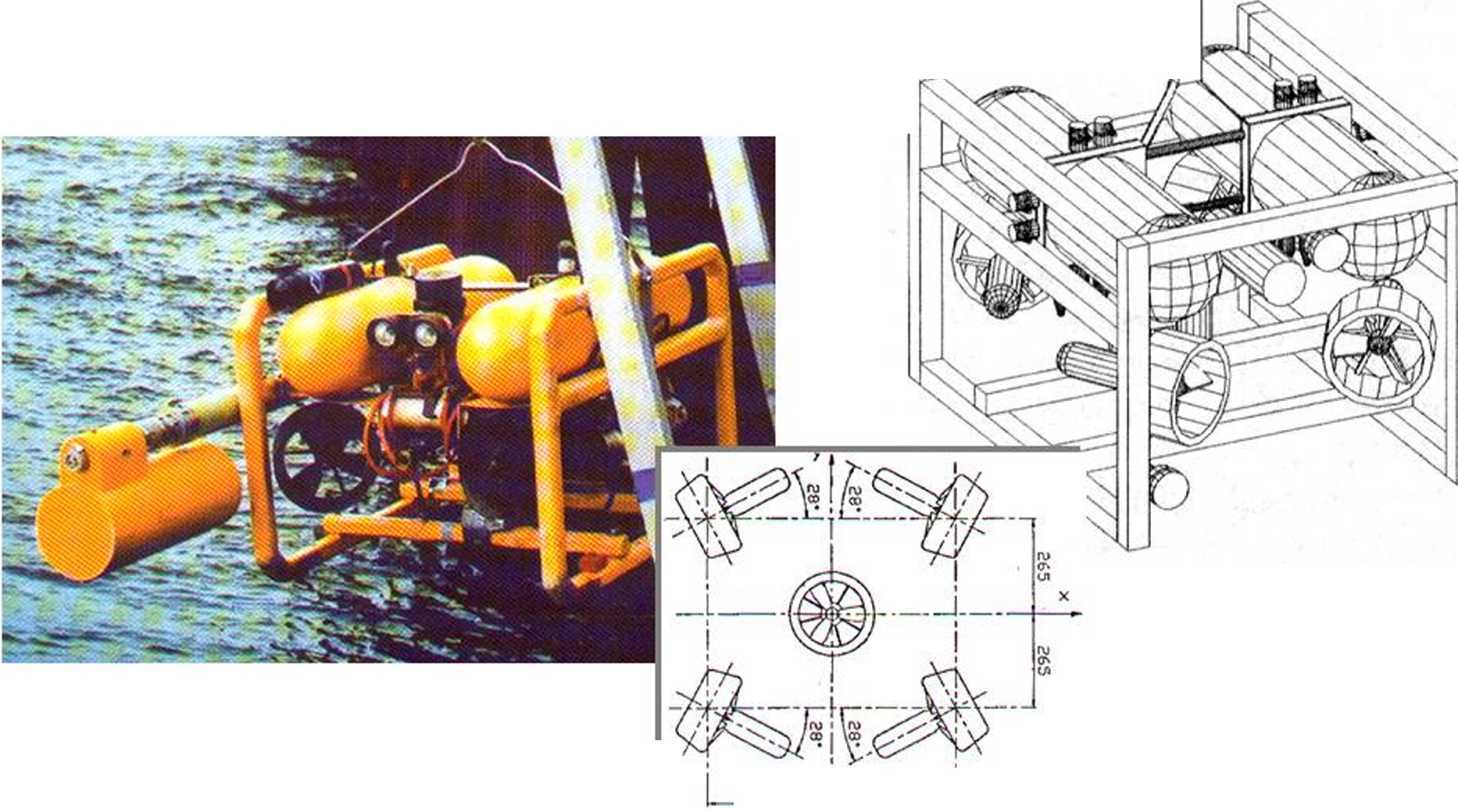
Zasada sterowania 5 wirnikami
34S 1 345
Wyszukiwarka
Podobne podstrony:
Slajd46 (16) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> złożone -4-=- z systemem wielokołowych w
Slajd48 (16) AUTONOMICZNE ROBOTY MOBILNE - chodzące (kroczące) -> wybór ... Roboty jedno i dwunoż
Slajd49 (16) AUTONOMICZNE ROBOTY MOBILNE - chodzące (kroczące) inne ...Wspinający się robot inspekcy
Slajd42 (17) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> trzykołowe Zalety Wady (ogólnie) •
Slajd43 (17) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> czterokołowe Zalety Wady •
Slajd44 (17) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> sześcio- i ośmio- kołowe Zalety Wady •
Slajd45 (17) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> gąsienicowe Zalety Wady •
31357 Slajd41 (17) AUTONOMICZNE ROBOTY MOBILNE - klasyfikacja i porównanie cechRoboty jeżdżące: •
slajd50 (15) AUTONOMICZNE ROBOTY MOBILNE - latające -> wybór ... Robot - sterowiec: -
więcej podobnych podstron