Slajd46 (16)
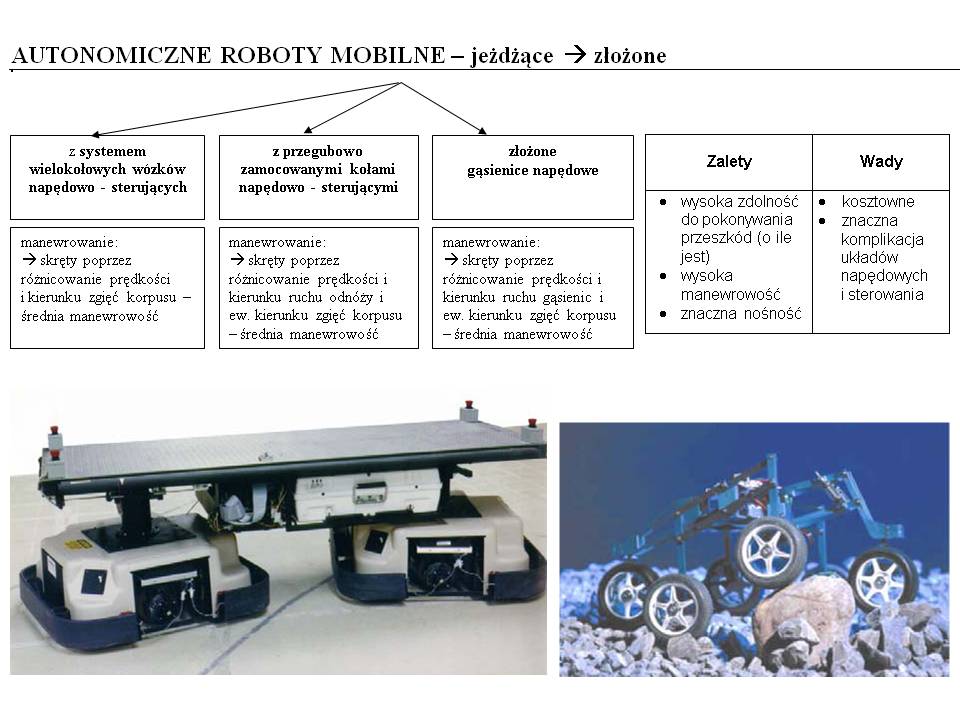
AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> złożone
|
-4-=- z systemem wielokołowych wózków napędowo - sterujących |
z przegubowo zamocowań}'mi kołami napędowo - sterującymi |
złożone gąsienice napędowe | ||
|
manewrowanie: skręty poprzez różnicowanie prędkości i kierunku zgięć korpusu -średnia manewrowo ść |
manewrowanie: skręty poprzez różnicowanie prędkości i kierunku ruchu odnóży i ew. kierunku zgięć korpusu -średnia manewrowo ść |
manewrowanie: skręty poprzez różnicowanie prędkości i kierunku ruchu gąsienic i ew. kierunku zgięć korpusu -średnia manewrowo ść | ||
|
Zalety |
Wady |
|
• wysoka zdolność do pokonywania przeszkód (o ile jest) • wysoka manewrowość • znaczna nośność |
• kosztowne • znaczna komplikacja układów napędowych i sterowania |

Wyszukiwarka
Podobne podstrony:
Slajd42 (17) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> trzykołowe Zalety Wady (ogólnie) •
Slajd47 (16) AUTONOMICZNE ROBOTY MOBILNE - pływające -> batyskafy głębinowe Sterowanie i zasilani
Slajd48 (16) AUTONOMICZNE ROBOTY MOBILNE - chodzące (kroczące) -> wybór ... Roboty jedno i dwunoż
Slajd43 (17) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> czterokołowe Zalety Wady •
Slajd44 (17) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> sześcio- i ośmio- kołowe Zalety Wady •
Slajd45 (17) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> gąsienicowe Zalety Wady •
Slajd49 (16) AUTONOMICZNE ROBOTY MOBILNE - chodzące (kroczące) inne ...Wspinający się robot inspekcy
Slajd59 (13) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -> klasy (cd ) Jeszcze inne.....złożone (1-3&
31357 Slajd41 (17) AUTONOMICZNE ROBOTY MOBILNE - klasyfikacja i porównanie cechRoboty jeżdżące: •
więcej podobnych podstron