mechanika118
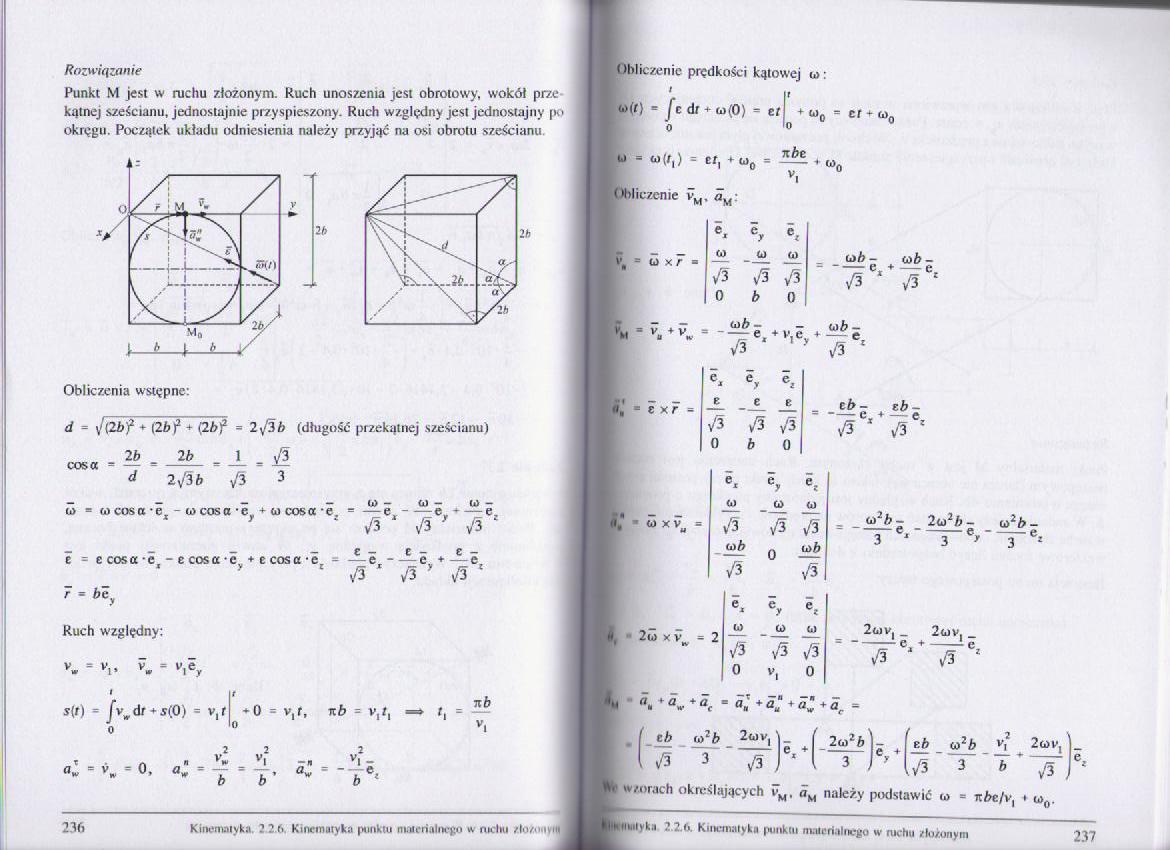
Rozwiązanie
Punkt M jest w ruchu złożonym. Ruch unoszenia jest obrotowy, wokół prze kątnej sześcianu, jednostajnie przyspieszony. Ruch względny jest jednostajny po okręgu. Początek układu odniesienia należy przyjąć na osi obrotu sześcianu

Obliczenia wstępne:
2ł>
2h
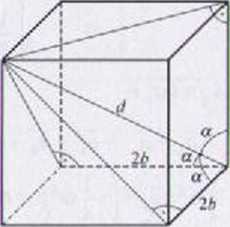
d = \J[2bf + (2b j2 + (2bf = 2y3 b (długość przekątnej sześcianu)
2 b 2b 1 fi
cos a = — = - = — = —
d Z fib fi 3
- - - - co - oj - ulał = to cosa ex - ca cosa ev + co cosa e. = —e,--e, *—e,
7 * *• C 7 /a
fi' fi ’ fi
-5 -i-i .-5-5 1 fi' fi1 fi'
e - e - e -
c = e cos a c. - e cos a c. + e cos a *e_ —e - —e. ♦ —e.
7 = bć.
Ruch względny:
Vw * V
i
s(0 = fvwdr + 5(0) = v,r
0 = v,r, nb = v,t,
o
2 ..2 .2
=
nb
Obliczenie prędkości kątowej w:
« ■{
e /cdr + co(Q) = er + <o0 = cr +
O 'O
<'Bieżenie vM. «M
■ <*> x vu
O),
* U),
7t&e
vg = ta * r -
wj ■ t xr =
|
a\i | ||||
|
ex |
5< | |||
|
ca |
<0 |
co |
co/> - |
^ ifib - |
|
fi |
fi |
fi |
~~fie’ |
* — e fi |
|
0 |
b |
0 | ||
|
ojb - — P |
+ v,e |
. ub- | ||
|
/3 ' |
” * | |||
|
Ś | ||||
|
e |
e |
e |
cb- |
cb - |
|
fi |
> |
V'3 |
- ~-Cv + V# 1 |
fi |
|
0 |
0 | |||
ex e, e.
— _ ta co
^ \/3
_ <ofr q (i)/)
ł. • 2co xv =2
_ urb- 2<jj2b - u2b-
3 3 Cy" ~3~Cj
ex ey
w to w
fi fi fi
o V, o
2wv. _ 2cov, _ - --e, +-- c
,/S * ^ 2
*•» + *ac ■ a„ + aj* + a” + =
t . v, v,.
«* = v» = 0, aw = -- = —, = - b
236
Kinematyka 2 2 6 Kinematyka punktu niaierialncgo * mchu złoto
lu itój L a2b 2a>v,
■ U 3 ^3 J * ( 3
^w/.Tjch określających eM, aM należy podstawić „> = Kbe/v, . u0. 3.:.h. Kinematyka puiikiu nuicrfalneto w na-hii zlożanym
237
Wyszukiwarka
Podobne podstrony:
mechanika113 Rozwiązanie Punkt M jest w ruchu złożonym. Ruch unoszenia jest ruchem jednostąinli przy
mechanika113 Rozwiązanie Punkt M jest w ruchu złożonym. Ruch unoszenia jest ruchem jednostąinli przy
DSC00307 (14) Rozwiązanie Punkt M jest w ruchu złożonym. Ruch unoszenia jest obrotowy, wokół przekąt
DSC00296 (18) Rozwiązanie Punkt M jest w mchu złożonym. Ruch unoszenia jest ruchem jednostajnie przy
mechanika48 Rozwiązanie Układ jest w równowadze statycznej, jeśli G^ s G s G^ Po przekroczeniu górne
mechanika50 Rozwiązanie Układ jest w równowadze statycznej, jeśli G^ s G & GnłłX Po przekroczeni
mechanika56 Rozwiązanie Układ jest w równowadze statycznej, jeśli S k Saim. Po przekroczeniu równo*
36 (332) 166 ODPOWIEDZI, WSKAZÓWKI. ROZWIĄZANIA r 154. 2^5. Rozwiązanie. Punkt .S jest środkiem ok
Ruch złożony, prędkość, przyspieszenie Ruch złożony punktuW ruchu złożonym punktu prędkość bezwzględ
Ruch ogólny,?finicja, równania ruchu, prędkość (2) Przemieszczenia bryły w ruchu ogólnym Ruch ogólny
DSC00304 (18) Kottfkzanie punkt M jest w ruchu płożonym. Ruch panoszenia jest obrotowy jednostajny,
mechanika92 Rozwiązanie Ruch punktu A jest prostoliniowy, jednostajnie przyspieszony. C — chwilowy ś
Slajd34 3 Metoda geometryczna - przykład Punktem optymalnym jest punkt C. Jest to wierzchołek zbioru
Slajd6 2 Prędkość w ruchu kulistym ruch ciała At—>0 At—>0 At^O ^x r = co x r Chwilowa oś obrot
MechanikaD9 Jeżeli ruch punktu przyłożenia siły jest ruchem obrotowym wokół stałego punktu 0,
więcej podobnych podstron