23 luty 07 (25)
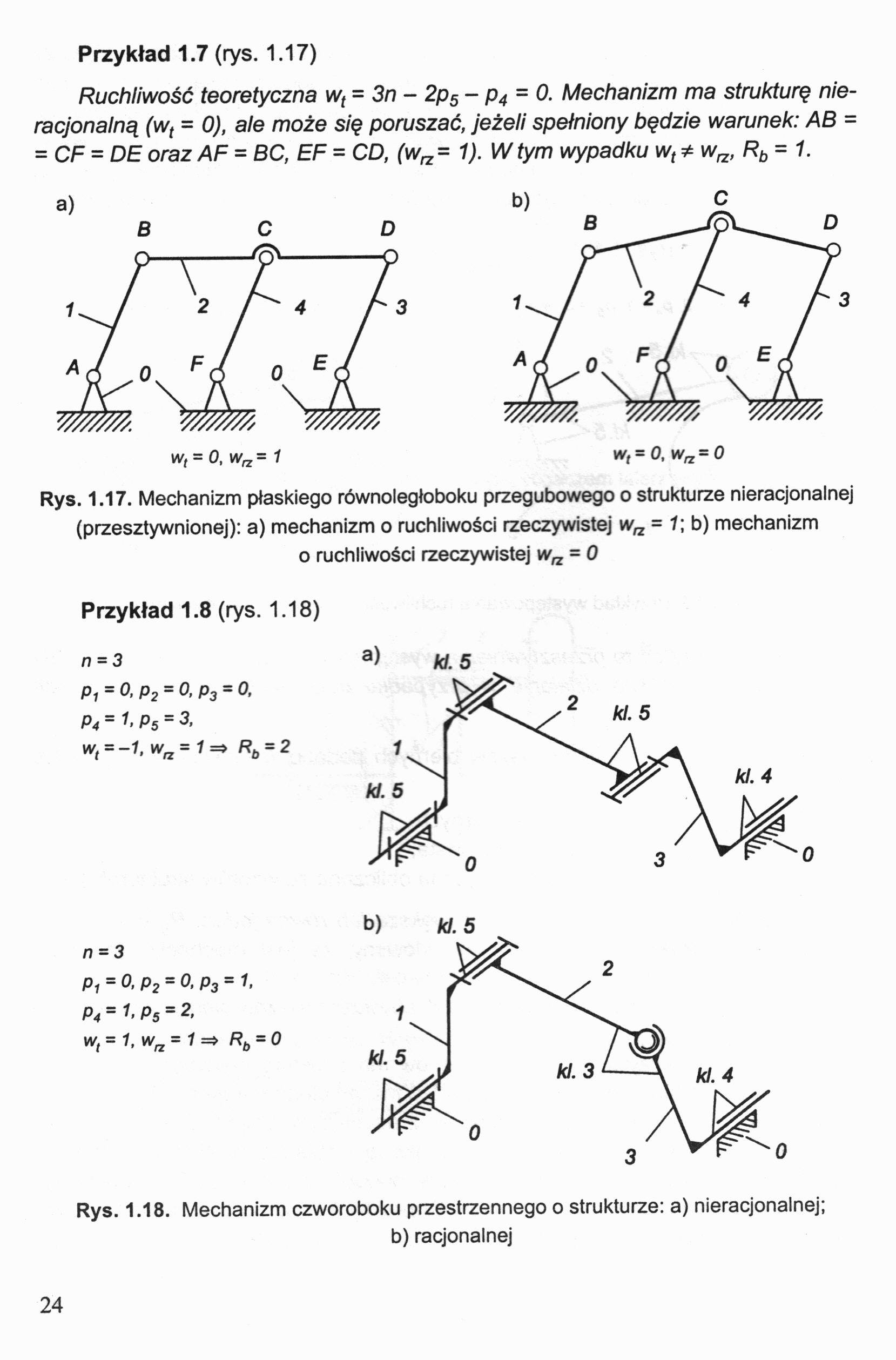
Przykład 1.7 (rys. 1.17)
Ruchliwość teoretyczna wt = 3n - 2p5 - p4 = 0. Mechanizm ma strukturę nieracjonalną (wt = 0), ale może się poruszać, jeżeli spełniony będzie warunek: AB = = CF = DE oraz AF = BC, EF = CD, (wrz= 1). W tym wypadku w, * wa, Rb = 1.
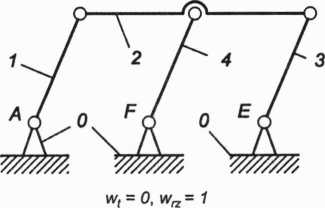
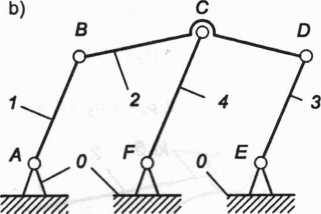
Rys. 1.17. Mechanizm płaskiego równoległoboku przegubowego o strukturze nieracjonalnej (przesztywnionej): a) mechanizm o ruchliwości rzeczywistej w„ = 1\b) mechanizm o ruchliwości rzeczywistej wn = 0
a) Id. 5
b) ki. 5
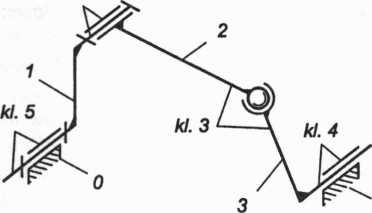
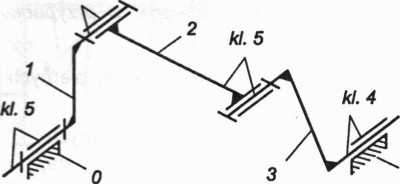
Przykład 1.8 (rys. 1.18) n = 3
P, = 0, p2 = 0, p3 = 0,
P4 =1,P5 = 3,
wi = ~1’ wn=1^> Rb = 2 n-3
p1 =0,p2 = 0, p3 = 1. p4 =1,p5 = 2,
w, = 1,w„=1=> Rb- 0
Rys. 1.18. Mechanizm czworoboku przestrzennego o strukturze: a) nieracjonalnej;
b) racjonalnej
24
Wyszukiwarka
Podobne podstrony:
23 luty 07 (34) Przykład 1.14 (rys. 1.25) Grupa strukturalna n = 2,ps = 3, wgr = O Grupa strukturaln
23 luty 07 (151) 1 1 R0i - O Rys. 3.33. Człon napędzający mechanizmu Oldhama oswobodzony od więzów P
23 luty 07 (21) Przykład 1.1 n = 3p1 = 0,p2 = 0, p3= 1, p4=1, ps=2 Rys. 1.11. Przestrzenny czworobok
23 luty 07 (22) 1.1.6.3. Przykłady obliczania ruchliwości mechanizmów płaskich Obliczenie ruchliwośc
23 luty 07 (29) 1.2.1.2. Przykłady zastępowania par klasy 4 parami klasy 5 Przykład 1.9 (rys. 1.20)
23 luty 07 (33) 1.2.1.4. Przykłady klasyfikacji strukturalnej Przykład 1.12 (rys. 1.23) Grupa strukt
23 luty 07 (35) Przykład 1.15 (rys. 1.26) Analizowany łańcuch kinematyczny jest mechanizmem klasy 3
23 luty 07 (140) Przykład 3.3 Mechanizm czworoboku przegubowego Przeprowadzić analizę kinetostatyczn
23 luty 07 (60) Przykład 2.2 Mechanizm czworoboku przegubowego Wyznaczymy metodą planów prędkości i
23 luty 07 (71) Przykład 2.5 Mechanizm Oidhama Wyznaczymy metodą planów prędkość i przyspieszenie li
23 luty 07 (123) Rys. 3.7. Przykład wyznaczania masy, położenia środka masy i momentu bezwładności c
23 luty 07 (17) Rys. 1.7. Para kinematyczna klasy 4 (wyższa): a) para krzywka - popychacz; b) para z
23 luty 07 (23) Przykład 1.4 n = 2 p4= 1, ps = 2, iv= 1 Rys. 1.14. Mechanizm krzywkowy z popychaczem
23 luty 07 (28) Tablica 1.2 Typowe grupy strukturalne Rys. 1.19. Przykłady zamiany grupy strukturaln
23 luty 07 (76) 3 6 2 ~sk-1,k = sk,k-1 sk-1,k Rys. 2.25. Ilustracja graficzna zasa
23 luty 07 (101) Rys. 2.44. Schematy przekładni obiegowej z zaznaczonymi prędkościami kątowymi: a) b
23 luty 07 (103) Dla przekładni o dwóch stopniach swobody (przekładnia różnicowa, rys. 2.44a), w któ
23 luty 07 (104) Rys. 2.45. Przekładnia obiegowa jednorzędowa o jednym stopniu swobody: a) schemat k
23 luty 07 (109) Rozwiązanie Przełożenie przekładni obliczamy podobnie jak przełożenie iJ23 w przykł
więcej podobnych podstron