279 (19)
278
Rozdział 5. Układy regulacji impulsowej
278
ki(Ti
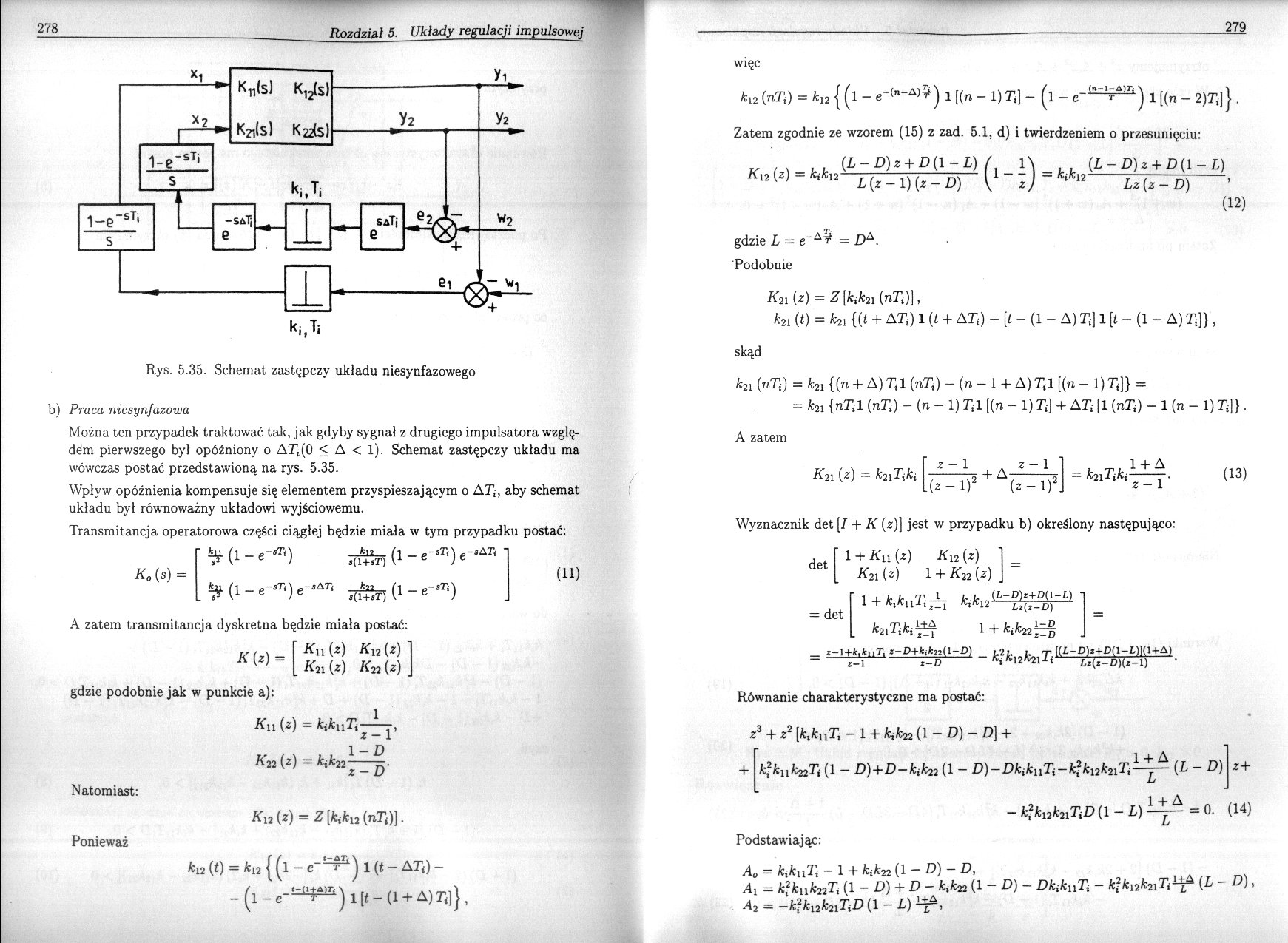
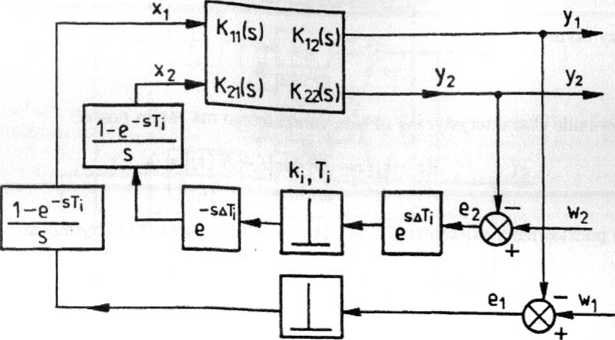
Rys. 5.35. Schemat zastępczy układu niesynfazowego
b) Praca niesynfazowa
Można ten przypadek traktować tak, jak gdyby sygnał z drugiego impulsatora względem pierwszego był opóźniony o AT,(0 < A < 1). Schemat zastępczy układu ma wówczas postać przedstawioną na rys. 5.35.
Wpływ opóźnienia kompensuje się elementem przyspieszającym o AT,, aby schemat układu był równoważny układowi wyjściowemu.
Transmitancja operatorowa części ciągłej będzie miała w tym przypadku postać:
K0(s) =
f (1 - e~sTi) e
-5 AT,
*12
s(1+jT)
_*22_
s(l+*T)
e *T') e"
(1 - e-‘T0
*21 (z) *22 W 1
*22 (z) = *i*22
Z — 1 *
I-D
sAT,
Natomiast:
Ponieważ
z-D
Ku (z) = Z[kiku (nTi)}.
ku (t) = ku { (l - e-^) 1 (t - ATj) -
_ !(<-(! +A) T,]},
więc
*12 (nli) = *12 { (l - e-'"-A^) 1 [(n - 1) T] - (l - 1 [(n - 2)Tj}
Zatem zgodnie ze wzorem (15) z zad. 5.1, d) i twierdzeniem o przesunięciu:
#12 (z) = *i*i2
(L - D) z + D (1 - L) L{z-l)(z-D)
(l - = *i*12-
(L-D)z + D(l-L)
Lz {z — D)
gdzie L = e A^ = DA. Podobnie
#21 (z) = Z [*i*21 (nT)],
*21 (t) = *21 {(t + AT,) 1 (t + ATi) — [t — (1 — A) Ti] 1 [t - (1 - A) T]},
skąd
*2i (nT) = *2i {(n + A) T 1 (nTi) - (n - 1 + A) T,1 [(n - 1) T,]} =
= *21 {nTi (nT,) - (n - 1) Tl [(n - 1) T,] + AT, [1 (nT) - 1 (n - 1) T]} .
A zatem
#21 (z) — *2lT*i
= *21 Tiki
(13)
Wyznacznik det [/ + T (z)] jest w przypadku b) określony następująco: det
1 + #n (z) #12 (z)
#21 (2) 1 + #22 (z)
— det
1 . L L 'T* 1 L. 1- (L-D)t + D(l-L) l + Lz(ż-D)
*2lT,*i*^ l + fci*22^§
. _ t-l+fcfcnTi z-P+fcit22(l-J) L2Ł. ł >T l(t.-Q)«+P(l-Ł)l(l+A)
" z-1 z-D »i»12*21 Z, L*(ł-D)(*-1)
Równanie charakterystyczne ma postać:
z3 + z2 [*i*nT — 1 + *1*22 (1 — D) — D] +
1 +A
*,2*n*22Ti (1 - D)+D-kxk22 (1 - D)-DklknTx-k2ik12k21Tx—— (L - D)
z+
- *,2*i2*2iTiT (1 - L) = 0. (14)
Podstawiając:
A0 = *i*nT - 1 + *i*22 (1 - D) - D,
Ai = k2knk22Tx (1 - D) + D - *,*22 (1 - £>) - D*j*nT - *,2*i2*2iT[L - D), A2 = -kfk12k21TiD(l-L)^,
Wyszukiwarka
Podobne podstrony:
275 (19) 274 Rozdział 5. Układy regulacji impulsowej dla musi zachodzić: 0 < kikTi < Ti l-D 1
281 (19) 280 Rozdział 5. Układy regulacji impulsowej otrzymujemy z3 + A„z2 + Atz + A2 = 0. W celu sk
251 (19) 250 Rozdział 5. Układy regulacji impulsowej skąd wynika, że 250 Rozdział 5. Układy regulacj
253 (19) 252 Rozdział 5. Układy regulacji impulsowej Rys. 5.12. Obszar parametrów zapewniających sta
261 (19) 260 Rozdział 5. Układy regulacji impulsowej uj — s/ićjći. Stabilność układu badamy na podst
263 (19) 262 Rozdział 5. Układy regulacji impulsowej gdzie: (3) D = e~%, L = e~ł. Transmitancja dysk
267 (19) 266 Rozdział 5. Układy regulacji impulsn^j mamy 0 < ifc < 2 l + £> 1 - D (13) Pon
269 (19) 268 Rozdział 5. Układy regulacji impulsowej Rys. 5.27. Schemat blokowy układu regulacji imp
271 (18) 270 Rozdział 5. Układy regulacji impulsowej Po podstawieniu danych otrzymujemy: z = 0. Wida
273 (20) 272 Rozdział 5. Układy regulacji impulsowej 272 Rozdział 5. Układy regulacji
277 (20) 276 Rozdział 5. Układy regulacji impulsowej Rys. 5.34. Układ regulacji impulsowej dwóch
283 (17) 282 Rozdział 5. Układy regulacji impulsowej Transmitancję „z" układu otwartego można z
285 (17) 284 Rozdział 5. Układy regulacji impulsowej Rys. 5.37. Obszar dopuszczalnych nastaw na płas
287 (17) 286 Rozdział 5. Układy regulacji impulsowej Rys. 5.39. Obszar nastaw dopuszczalnych na płas
289 (18) 288 Rozdział 5. Układy regulacji impulsowejZadanie 5.17 Wyprowadzić warunki stabilności dla
291 (17) 290 Rozdział 5. Układy regulacji impulsowej Rys. 5.43. Układ regulacji impulsowej wielowymi
293 (18) 292 Rozdział 5. Układy regulacji impulsowej — dla równania (5) z — 1 + —Tikikj— = 0. 4 z(8)
295 (18) 294 Rozdział 5. Układy regulacji impulsowej Rozwiązanie Oznaczmy: K (s) = K„ (s) K, (s) lub
297 (17) 296 Rozdział 5. Układy regulacji impulsowej Rys. 5.49. Zastępczy schemat blokowy układu z r
więcej podobnych podstron