HPIM0821
5, Sterowanie robotów przemysłowych
Dlatego też nawigacja wirtualna musi być łączona z innymi metodami, urnowi, I wiającymi lokalizację położenia pojazdu w hali i wykrywanie przeszkód.
Przyrostowa lokalizacja położenia polega na wykorzystaniu sygnały I z przetworników obrotowo-impulsowych, zainstalowanych na kołach jezdny^, I i kołach skrętnych. Znając liczbę impulsów wygenerowanych przez każde ko|0 I komputer sterujący może zgrubnie określić przemieszczenie wózka w dwóch I osiach współrzędnych, czyli w konsekwencji jego położenie. Obliczenia tcg0 typu umożliwiają bieżące sterowanie wózkiem, są jednak obarczone błędami kumulującymi się po każdym przemieszczeniu. Ponadto ten sposób pomiam przemieszczenia uniemożliwia wykrywanie nieprzewidzianych przeszkód na trasie jazdy,
W metodzie lokalizacji optycznej stosuje się kamerę CCD zainstalowaną sufitem hali oraz naniesione znaki optyczne na górnej powierzchni wózka, Komputerowa analiza obrazu z kamery umożliwia dokładne określenie położenia wózka i przeszkód, warunkiem jest jednak praca programu rozpoznawania obrazów w czasie rzeczywistym, co wymaga stosowania bardzo szybkich komputerów.
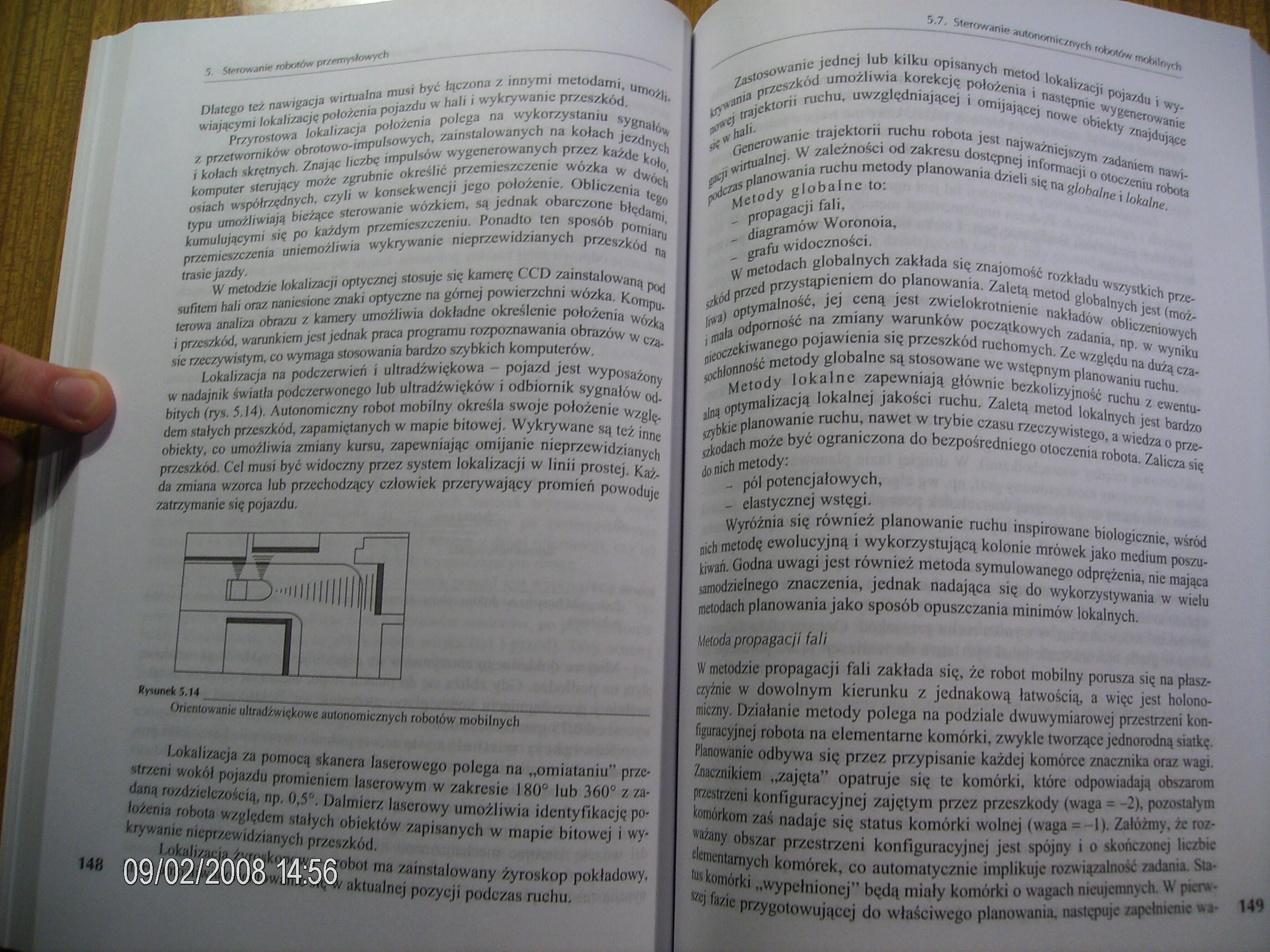
Lokalizacja na podczerwień i ultradźwiękowa - pojazd jest wyposażony w nadajnik światła podczerwonego lub ultradźwięków i odbiornik sygnałów od- I bitych (rys. 5,14). Autonomiczny robot mobilny określa swoje położenie wzglę. I dcm stałych przeszkód, zapamiętanych w mapie bitowej. Wykrywane są też inne I obiekty, co umożliwia zmiany kursu, zapewniając omijanie nieprzewidzianych I przeszkód. Cel musi być widoczny przez system lokalizacji w linii prostej. Każ- I da zmiana wzorca lub przechodzący człowiek przerywający promień powoduje I zatrzymanie się pojazdu.

Rywnck 5,14 ^ w. ,■
Orientowanie ultradźwiękowe autonomicznych robotów mobilnych
Lokalizacja za pomocą skanera laserowego polega na „omiataniu” przestrzeni wokół pojazdu promieniem laserowym w zakresie 180° lub 360° z zadaną rozdzielczością, np, 0,5°. Dalmierz laserowy umożliwia identyfikację położenia robota względem stałych obiektów zapisanych w mapie bitowej i wykrywanie nieprzewidzianych przeszkód.
L()kąli/^^sźvH^N^RR^n ma zainstalowany żyroskop pokładowy.
pozycji podczas ruchu.
Zastosowanie jednej lub kilku opisanych metod lokalizacji pojazdu i wy*
aIJja przeszkód umożliwia korekcję położenia i następnie wygenerowanie
: trajektorii ruchu, uwzględniającej i omijającej nowe obiekty znajdujące
** Generowanie trajektorii ruchu robota jest najważniejszym zadaniem nawi-•• wirtualnej. W zależności od zakresu dostępnej informacji o otoczeniu robota planowania ruchu metody planowania dzieli się na globalne i lokalne.
Metody globalne to:
- propagacji fali,
- diagramów Woronoia,
- grafu widoczności.
W metodach globalnych zakłada się znajomość rozkładu wszystkich prze* ^ód przed przystąpieniem do planowania. Zaletą metod globalnych jest (moź-UWa) optymalność, jej ceną jest zwielokrotnienie nakładów obliczeniowych I jjiała odporność na zmiany warunków początkowych zadania, np. w wyniku nieoczekiwanego pojawienia się przeszkód ruchomych. Zc względu na dużą czasochłonność metody globalne są stosowane we wstępnym planowaniu ruchu.
Metody lokalne zapewniają głównie bezkolizyjność ruchu z ewentualną optymalizacją lokalnej jakości ruchu. Zaletą metod lokalnych jest bardzo szybkie planowanie ruchu, nawet w trybie czasu rzeczywistego, a wiedza o przeszkodach może być ograniczona do bezpośredniego otoczenia robota. Zalicza się do nich metody:
- pól potencjałowych,
- elastycznej wstęgi.
Wyróżnia się również planowanie ruchu inspirowane biologicznie, wśród nich metodę ewolucyjną i wykorzystującą kolonie mrówek jako medium poszukiwań. Godna uwagi jest również metoda symulowanego odprężenia, nie mająca samodzielnego znaczenia, jednak nadająca się do wykorzystywania w wielu metodach planowania jako sposób opuszczania minimów lokalnych.
Metoda propagacji fali
W metodzie propagacji fali zakłada się, że robot mobilny porusza się na płaszczyźnie w dowolnym kierunku z jednakową łatwością, a więc jest holono-miczny. Działanie metody polega na podziale dwuwymiarowej przestrzeni konfiguracyjnej robota na elementarne komórki, zwykle tworzące jednorodną siatkę. Planowanie odbywa się przez przypisanie każdej komórce znacznika oraz wagi. Znacznikiem „zajęta” opatruje się te komórki, które odpowiadają obszarom przestrzeni konfiguracyjnej zajętym przez przeszkody (waga = -2), pozostałym komórkom zaś nadaje się status komórki wolnej (waga = — 1). Załóżmy, żc rozważany obszar przestrzeni konfiguracyjnej jest spójny i o skończonej liczbie elementarnych komórek, co automatycznie implikuje rozwiązalność zadania. Statui komórki „wypełnionej” będą miały komórki o wagach nieujemnych. W pierw* raj fazie przygotowującej do właściwego planowania, następuje zapełnienie »i*
149
Wyszukiwarka
Podobne podstrony:
HPIM0803 5. Sterowanie robotów przemysłowych — układów sterować Podstawową, najbardziej rozpowszechn
HPIM0811 5. Sterowanie robotów przemysłowych Tablica 5.1. Funkcje spełnione przez urządzenia elektry
HPIM0813 S. Sterowanie robotów przemysłowych do jednostki logicznej, w której informacje o wzajemnym
HPIM0814 5. Sterowanie robotów przemysłowych 5. Sterowanie robotów przemysłowych Architektura
HPIM0819 5. Sterowanie robotów przemysłowych Tablica S.1 icd.) I Nr instrukcji Typ
HPIM0822 5. Sterowanie robotów przemysłowych gami wszystkich komórek wolnych i zajętych. Komórce poc
P1080240 5. Sterowanie robotów przemysłowych wymagać także pewne wielkości, na które robot nie ma be
HPIM0808 5. Sterowanie robotów piwnystowych Roboty z układami o stałym programie (tzw. pick and plac
HPIM0812 5. Sterowanie robolów przemysłowych 5. Sterowanie robolów przemysłowych łącznika K3 - linia
HPIM0826 Napędy robotów przemysłowych Pneumatyczne Blok elementów wykonawczych napadu zawiera siłown
HPIM0829 6. Napędy robotów przemysłowych Zastosowanie napędów elektrohydraulicznych w robotach przem
HPIM0832 6. Napędy robotów przemysłowych 6A. Napędy elektryce Sygnał E na wyjściu regulatora położen
HPIM0839 6. Napędy robotów przemysłowych KpandcfcJ*_ Scbemay współpracy mechanizmu dźwigniowego i pr
HPIM0840 6. Napędy robotów przemysłowych a) b) c) Rysunek 6.31 Rodzaje przekł
HPIM0842 6. Napędy robotów przemysłowych Możliwości zastosowania przekładni zębatkowych do zamiany r
79631 P1080244 5. Sterowanie robotów przemysłowych we, regulację PID oraz funkcje sterowania silniki
Układy sterowania robotów przemysłowych Układ sterowania robota przemysłowego powinien zapewniać
więcej podobnych podstron