Politechnika Opolska w Opolu Wydział: Elektrotechnika i Automatyka Kierunek: Automatyka i Robotyka
|
|
|
|
Data: 02.12.1998 09.12.1998 |
|
Autorzy: |
Łukasz Iwoński |
|
|
|
|
|
Mateusz Różycki |
|
|
nr ćw. |
|
|
|
|
|
7, 8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Temat: |
Niezrównoważone układy mostkowe |
|
|
|
|
Wstęp
Celem ćwiczenia jest poznanie własności układów mostkowych i zasad doboru elementów układu mostkowego.
schemat układu
Dla mostka niezrównoważonego względem przekątnej zasilania R2 = R4.
Dla mostka niezrównoważonego względem przekątnej zerowej R3 = R4.
Przyrządy użyte podczas ćwiczenia:
pięć opornic dekadowe kl. 0,05;
multimetr;
transformator ze stabilizatorem napięcia.
Obliczenia wstępne
W miejsce przetworników wstawione zostały opornice dekadowe, symulujące zależności:
dla elementu pomiarowego - Rp = (R0 + apX)(1 + bZ);
dla elementu porównawczego - Rk = (R0 + akX)(1 + bZ);
Gdzie:
X - wielkość mierzona, której wartość zmieniano w zakresie od 0 do 100, co 10 jednostek;
Z - wielkość wpływająca (zakłócenie);
R0, ap, ak i b - wielkości stałe.
Optymalna wartość 
Rg = 100 [W] |
||||||||
R2=R4[W] |
Ug [V] |
Pg [W] |
R2=R4[W] |
Ug [V] |
Pg [W] |
R2=R4[W] |
Ug [V] |
Pg [W] |
10 |
0,176 |
3,10E-04 |
200 |
0,159 |
2,53E-04 |
3000 |
0,018 |
3,24E-06 |
20 |
0,216 |
4,67E-04 |
300 |
0,124 |
1,54E-04 |
4000 |
0,014 |
1,96E-06 |
30 |
0,233 |
5,43E-04 |
400 |
0,101 |
1,02E-04 |
5000 |
0,011 |
1,21E-06 |
40 |
0,24 |
5,76E-04 |
500 |
0,086 |
7,40E-05 |
6000 |
0,009 |
8,10E-07 |
50 |
0,24 |
5,76E-04 |
600 |
0,074 |
5,48E-05 |
7000 |
0,0076 |
5,78E-07 |
60 |
0,237 |
5,62E-04 |
700 |
0,065 |
4,23E-05 |
8000 |
0,0067 |
4,49E-07 |
70 |
0,232 |
5,38E-04 |
800 |
0,058 |
3,36E-05 |
9000 |
0,0059 |
3,48E-07 |
80 |
0,227 |
5,15E-04 |
900 |
0,053 |
2,81E-05 |
10000 |
0,0054 |
2,92E-07 |
90 |
0,22 |
4,84E-04 |
1000 |
0,048 |
2,30E-05 |
|
||
100 |
0,214 |
4,58E-04 |
2000 |
0,026 |
6,76E-06 |
|
||
R2 = R4 = 57,7 [W] |
||||||||
Rg |
Ug [V] |
Pg [W] |
Rg |
Ug [V] |
Pg [W] |
Rg |
Ug [V] |
Pg [W] |
10 |
0,05 |
2,50E-05 |
200 |
0,284 |
8,07E-04 |
3000 |
0,374 |
1,40E-03 |
20 |
0,087 |
7,57E-05 |
300 |
0,31 |
9,61E-04 |
4000 |
0,376 |
1,41E-03 |
30 |
0,118 |
1,39E-04 |
400 |
0,325 |
1,06E-03 |
5000 |
0,377 |
1,42E-03 |
40 |
0,142 |
2,02E-04 |
500 |
0,336 |
1,13E-03 |
6000 |
0,379 |
1,44E-03 |
50 |
0,163 |
2,66E-04 |
600 |
0,342 |
1,17E-03 |
7000 |
0,382 |
1,46E-03 |
60 |
0,181 |
3,28E-04 |
700 |
0,350 |
1,23E-03 |
8000 |
0,382 |
1,46E-03 |
70 |
0,197 |
3,88E-04 |
800 |
0,353 |
1,25E-03 |
9000 |
0,382 |
1,46E-03 |
80 |
0,21 |
4,41E-04 |
900 |
0,356 |
1,27E-03 |
10000 |
0,382 |
1,46E-03 |
90 |
0,228 |
5,20E-04 |
1000 |
0,357 |
1,27E-03 |
|
||
100 |
0,231 |
5,34E-04 |
2000 |
0,369 |
1,36E-03 |
|
||
Rg =100 [W] |
||||
X |
R4 = 10[W] |
R4 = 100[W] |
R4 = 1000[W] |
R4 = 57,7[W] |
10 |
0,071 |
0,049 |
0,01 |
0,057 |
20 |
0,081 |
0,088 |
0,019 |
0,098 |
30 |
0,071 |
0,123 |
0,029 |
0,132 |
40 |
0,104 |
0,166 |
0,039 |
0,178 |
50 |
0,125 |
0,207 |
0,048 |
0,223 |
60 |
0,15 |
0,249 |
0,058 |
0,269 |
70 |
0,176 |
0,293 |
0,067 |
0,317 |
80 |
0,205 |
0,337 |
0,077 |
0,367 |
90 |
0,235 |
0,384 |
0,086 |
0,418 |
100 |
0,268 |
0,431 |
0,096 |
0,472 |
Rg = Ą |
||||
X |
R4 = 10[W] |
R4 = 100[W] |
R4 = 1000[W] |
R4 = 57,7[W] |
10 |
0,03 |
0,082 |
0,027 |
0,088 |
20 |
0,056 |
0,163 |
0,054 |
0,151 |
30 |
0,084 |
0,244 |
0,081 |
0,227 |
40 |
0,112 |
0,326 |
0,107 |
0,304 |
50 |
0,141 |
0,409 |
0,134 |
0,381 |
60 |
0,171 |
0,493 |
0,161 |
0,461 |
70 |
0,203 |
0,577 |
0,188 |
0,542 |
80 |
0,236 |
0,664 |
0,214 |
0,625 |
90 |
0,272 |
0,752 |
0,241 |
0,711 |
100 |
0,311 |
0,841 |
0,268 |
0,800 |
|
|
|
Charakterystyka Ug = f(X) przy Rg = Ą |
Rg = 100 |
||||
Z |
R4 = 10[W] |
R4 = 100[W] |
R4 = 1000[W] |
R4 = 57,7[W] |
1 |
0,118 |
0,240 |
0,049 |
0,216 |
2 |
0,108 |
0,197 |
0,050 |
0,214 |
3 |
0,190 |
0,192 |
0,051 |
0,198 |
4 |
0,096 |
0,187 |
0,051 |
0,191 |
5 |
0,094 |
0,182 |
0,052 |
0,184 |
6 |
0,084 |
0,176 |
0,052 |
0,177 |
7 |
0,078 |
0,172 |
0,0517 |
0,170 |
8 |
0,074 |
0,167 |
0,0520 |
0,164 |
9 |
0,08 |
0,165 |
0,0521 |
0,162 |
10 |
0,074 |
0,160 |
0,0522 |
0,158 |
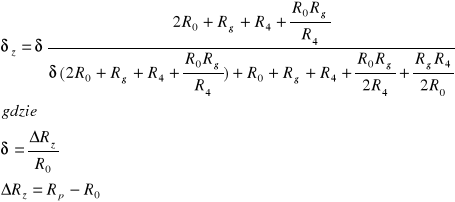
Błędy miernika:
Błąd nieliniowości miernika
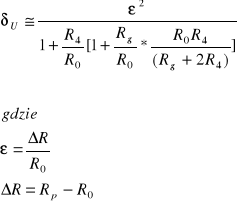
Błąd dodatkowy miernika:
Mostek niezrównoważony z symetrią względem przekątnej zerowej: R3 = R4
Rg = 100 [W] |
||||||||
R3=R4[W] |
Ug [V] |
Pg [W] |
R3=R4[W] |
Ug [V] |
Pg [W] |
R3=R4[W] |
Ug [V] |
Pg [W] |
10 |
0,274 |
7,51E-04 |
200 |
0,164 |
2,69E-04 |
3000 |
0,025 |
6,25E-06 |
20 |
0,261 |
6,81E-04 |
300 |
0,137 |
1,88E-04 |
4000 |
0,019 |
3,61E-06 |
30 |
0,251 |
6,30E-04 |
400 |
0,117 |
1,37E-04 |
5000 |
0,016 |
2,56E-06 |
40 |
0,244 |
5,95E-04 |
500 |
0,102 |
1,04E-04 |
6000 |
0,013 |
1,69E-06 |
50 |
0,236 |
5,57E-04 |
600 |
0,091 |
8,28E-05 |
7000 |
0,011 |
1,21E-06 |
60 |
0,229 |
5,24E-04 |
700 |
0,082 |
6,72E-05 |
8000 |
0,010 |
1,00E-06 |
70 |
0,222 |
4,93E-04 |
800 |
0,074 |
5,48E-05 |
9000 |
0,009 |
8,10E-07 |
80 |
0,217 |
4,71E-04 |
900 |
0,068 |
4,62E-05 |
10000 |
0,008 |
6,40E-07 |
90 |
0,211 |
4,45E-04 |
1000 |
0,063 |
3,97E-05 |
|
||
100 |
0,205 |
4,20E-04 |
2000 |
0,036 |
1,30E-05 |
|
||
Wyszukiwarka
Podobne podstrony:
kukawczyński, Analogowe i cyfrowe układy elektroniczne I P, Zasilacz sieciowy z prostownikiem mostko
APD 5 układy bramkowe
Układy Napędowe oraz algorytmy sterowania w bioprotezach
Układy wodiociągowe ze zb przepł końcowym i hydroforem
uklady dyspersyjne
15 Uklady PLL i t s
W3B Układy fazowe
UKŁADY ENERGOELEKTRONICZNE W GRZEJNICTWIE 5F SZER
Uklady kombinacyjne
12 Podstawy automatyki Układy sterowania logicznego
Inf przestrz wekt uklady rown
Eksploatowanie częstościomierzy, generatorów pomiarowych, mostków i mierników RLC
5 Układy kogeneracyjne
więcej podobnych podstron