POLITECHNIKA BIAŁOSTOCKA
WYDZIAŁ MECHANICZNY
KATEDRA MECHANIKI I INFORMATYKI STOSOWANEJ
LABORATORIUM MECHANIKI
INSTRUKCJA
BADANIE DYNAMIKI RUCHU UKŁADU
MECHANICZNEGO
ROBERT UŚCINOWICZ
BIAŁYSTOK 2009
2
1. CEL DWICZENIA
Celem dwiczenia jest doświadczalne wyznaczenie maksymalnej i średniej wartości siły
napięcia w lince łączącej dwa ciała układu mechanicznego poruszającego się w polu sił
ciężkości. Dwiczenie powinno również dostarczyd informacji o wpływie sił tarcia na wartośd
siły w lince łączącej ciała układu mechanicznego.
2. OPIS STANOWISKA
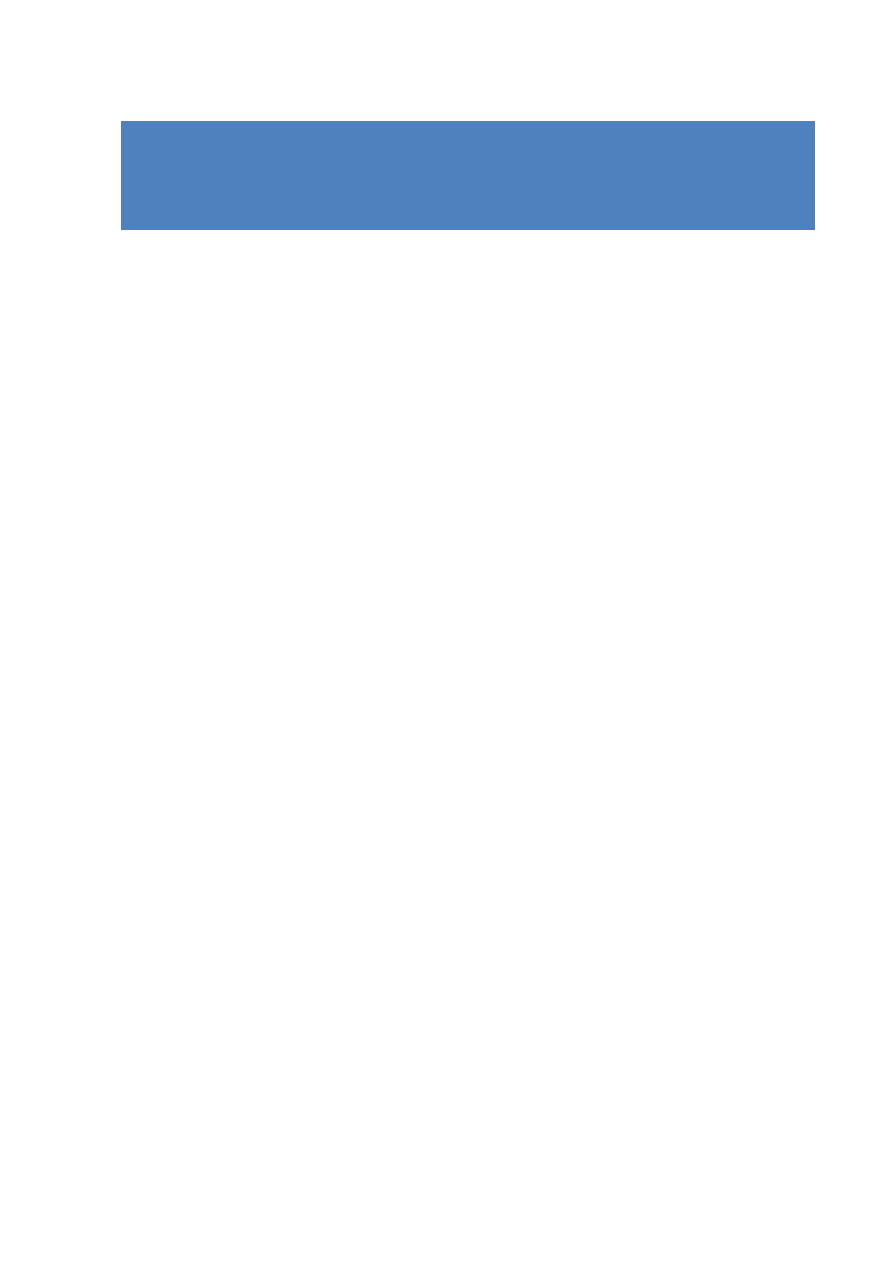
Stanowisko do badania dynamiki ruchu układu mechanicznego przedstawiono na
poniższej fotografii (
) i schematycznie na
. Składa się ono z następujących
elementów: równi pochyłej (1), prowadnicy (2), ułożyskowanego bloczka (3), kątomierza (4),
linki (5), klocka (6) (z wymiennymi wkładkami ciernymi), szalki z ciężarem G (7),
wzmacniacza tensometrycznego Spider 8 (8). Komputer PC współpracujący ze
wzmacniaczem, który jest wymagany do zarejestrowania i wizualizacji danych nie został
przedstawiony na rysunkach.
Rys. 1. Stanowisko do badania dynamiki ruchu układu mechanicznego
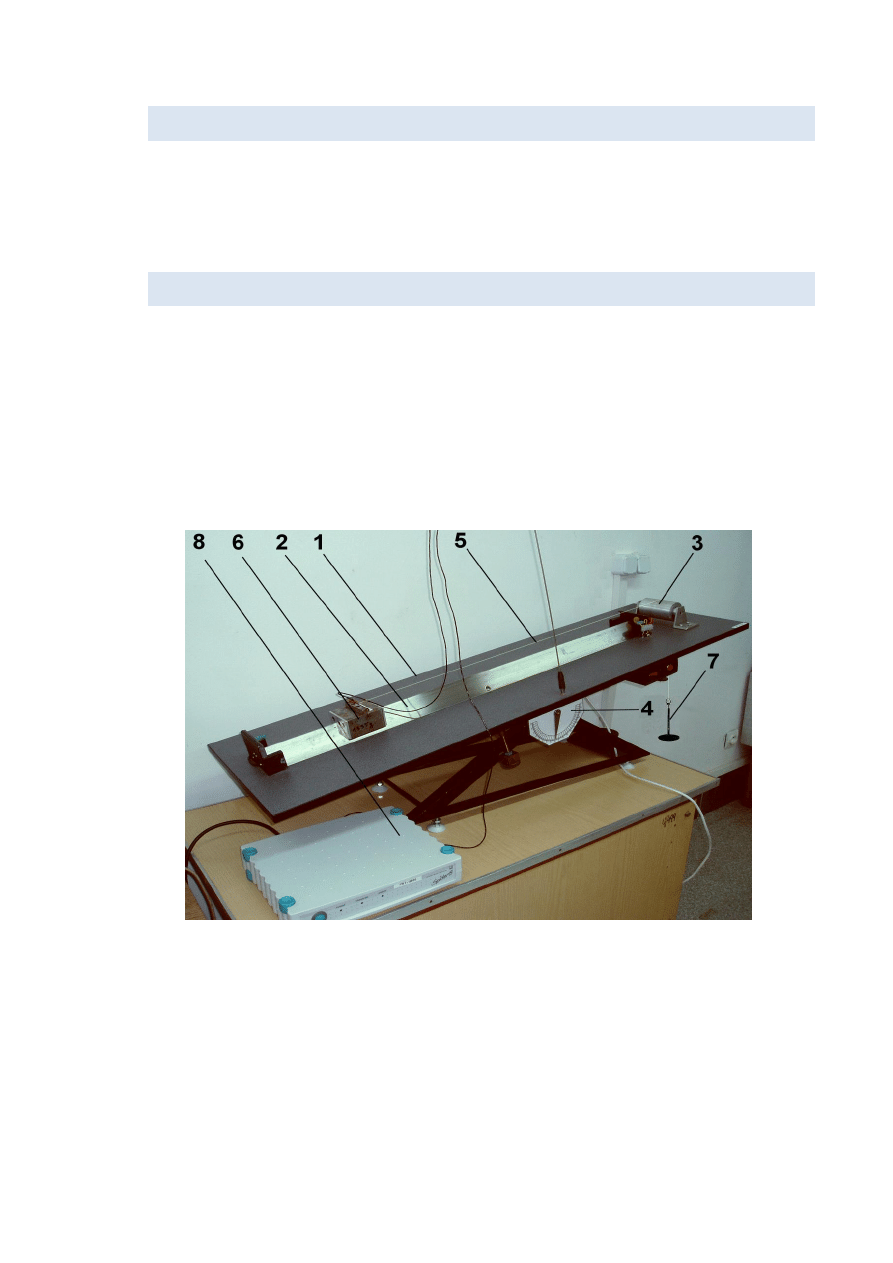
Stanowisko pomiarowe, którego ilustrację zamieszczono na
rys. 1 i 2
składa się z
dwóch ciał powiązanych ze sobą wiotką linką. Ruch układu jest wymuszany przez ciężarek G
, który to za pośrednictwem linki wprawia w ruch obrotowy ułożyskowany bloczek (linkę
nawinięto jednokrotnie na bloczek) i wymusza ruch klocka Q w górę równi. Klocek Q (
ślizga się po prowadnicy zamontowanej na równi pochyłej, której kąt nachylenia można
zmieniad za pomocą pokrętła umieszczonego pod płytą równi pochyłej (
). W trakcie
eksperymentu rejestrowana jest wartośd siły S w lince. Pomiar ten realizowany jest przy
3
pomocy tensometrycznego przetwornika siły, do którego jest zaczepiona linka. Przetwornik
siły, zbudowany jest w oparciu o tensometryczny układ półmostkowy, naklejony na stalowej
belce i zamontowany na górnej powierzchni klocka. Sygnał z przetwornika siły, w postaci
względnych zmian napięcia jest przesyłany do wzmacniacza tensometrycznego Spider 8 (
) i dalej w formie cyfrowej do komputera PC w celu archiwizacji i późniejszej wizualizacji
wyników pomiarów. W realizowanym dwiczeniu zastosowanie wzmacniacza pomiarowego
Spider 8 pozwala na rejestrację siły napięcia linki w czasie rzeczywistym oraz dokładny
pomiar czasu ruchu klocka na prowadnicy. Klocek posiada wymienne wkładki wykonane z
różnych materiałów. Poprzez wymianę wkładek możliwa jest ocena wpływu rodzaju
ślizgających się po sobie tworzyw na wartośd siły S w lince. Możliwe do zastosowania w
dwiczeniu pary trące materiałów zestawiono w
a)
b)
c)
d)
Rys. 2. Schemat badanego układu mechanicznego: a) schemat ogólny stanowiska, b) obciążenie siłowe klocka
o ciężarze
Q
, c) obciążenie bloczka, d) obciążenie ciężarka
G
4
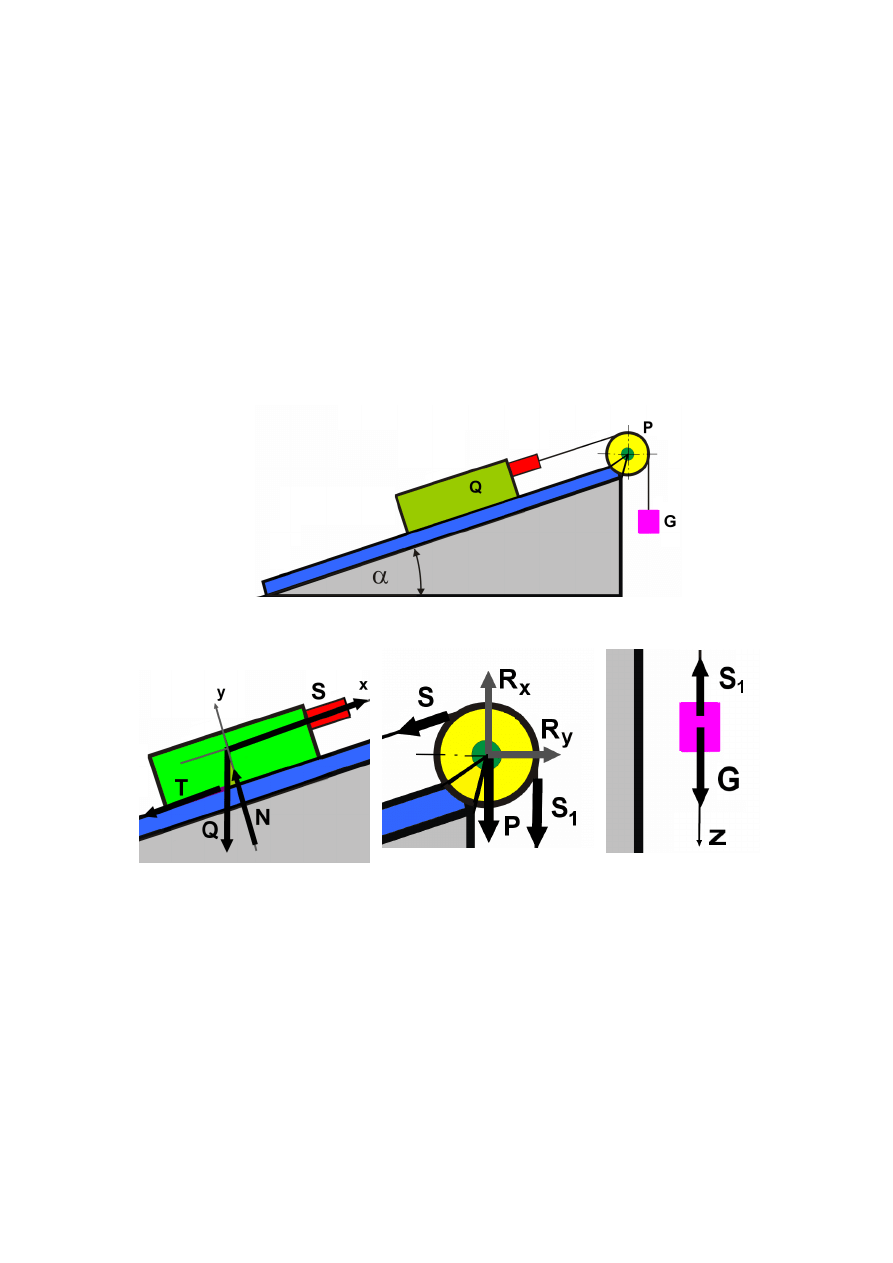
Rys. 3. Klocek
Q
z wymiennymi wkładkami: 1 – tensometryczny przetwornik siły, 2 – płytka mocująca
wkładki , 3 – linka łącząca klocek z ciężarkiem, 4 – wymienna para wkładek
Tab. 1. Zastosowane w dwiczeniu pary trących materiałów
powierzchnia prowadnicy
wkładka klocka
stal
stal
stal
stop aluminium,
stal
tworzywo sztuczne (poliamid)
stal
mosiądz
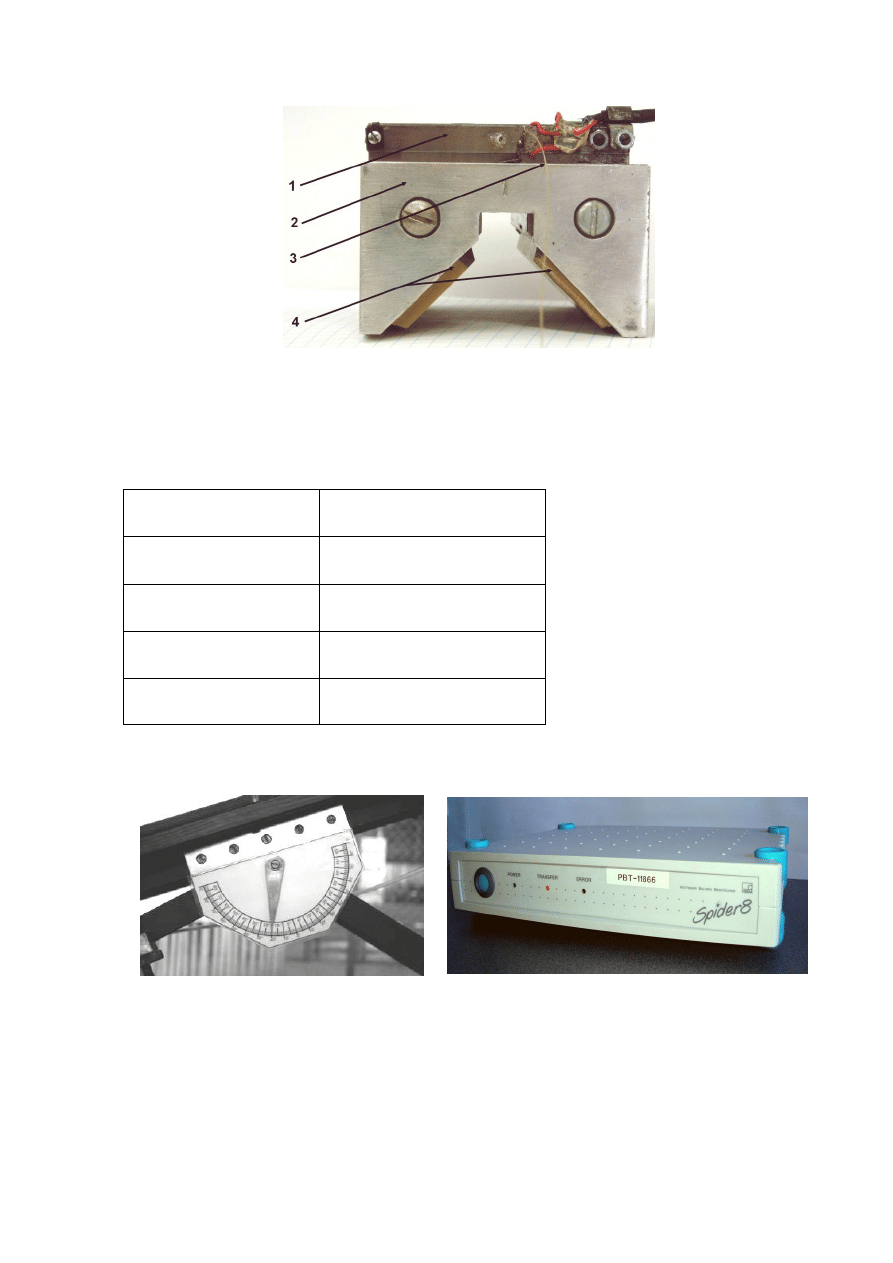
Rys. 4. Pomiar kąta nachylenia równi
Rys. 5. Wzmacniacz tensometryczny Spider 8
Tensometryczny przetwornik siły jest cienkościenną, jednostronnie utwierdzoną stalową
belką, na której naklejono dwa tensometry opornościowe w układzie półmostkowym. W
trakcie doświadczenia dochodzi do sprężystego ugięcia belki (pod wpływem siły
5
występującej w lince). Jeden z tensometrów (tzw. czynny) naklejony na belce doznaje
sprężystego odkształcenia zmieniając swoją opornośd. Drugi tensometr ma kompensowad w
układzie półmostkowym zmiany temperatury zachodzące w strefie działania przetwornika.
Jeżeli do układu tensometrycznego doprowadzi się stałe napięcie (w gałęzi zasilania) to
zmiana oporności tensometru czynnego wywoła zmianę napięcia w gałęzi pomiarowej. Aby
określid zależnośd pomiędzy wielkościami mechanicznymi (siła) i wielkościami elektrycznymi
(względny przyrost napięcia) należy dokonad procesu wzorcowania i zbudowad tzw.
charakterystykę statyczną przetwarzania. Najczęściej jest to prosta przechodząca przez
początek układu współrzędnych. Jeżeli zastosowany w dwiczeniu przetwornik
tensometryczny będzie obciążało się (monotonicznie) znanymi, coraz większymi wartościami
siły (odważniki o znanym ciężarze) i mierzyło odpowiadające im względne przyrosty napięcia
(we wzmacniaczu Spider 8), to w prosty sposób można zbudowad potrzebną charakterystykę
statyczną przetwornika i określid jej równanie. Posłuży ona później do wyznaczenia wartości
siły S (w lince) w trakcie przebiegu klocka po prowadnicy równi.
3. WIADOMOŚCI OGÓLNE
Dynamiczne równania różniczkowe dla klocka o ciężarze Q i masie
Q
m
mają postad:
sin
Q
m
x
T
S
Q
,
(1)
cos
0
Q
m
y
N
Q
,
(2)
gdzie:
Q
m
– masa klocka Q , S – siła napięcia nici,
T
– siła tarcia, N – reakcja normalna
podłoża,
– kąt nachylenia równi.
Drugie równanie jest równaniem statyki (
0
y
) i wyznaczamy z niego siłę normalną N ,
będącą składową pionową reakcji równi pochyłej na spoczywające na niej ciało:
cos
N
Q
.
(3)
Wykorzystując prawo tarcia Coulomba przyjmujemy wartośd siły tarcia
T
dla granicznego
przypadku, zatem
cos
T
N
Q
.
(4)
Wstawiając równanie (4) do różniczkowego równania (1) opisującego ruch klocka Q mamy:
cos
sin ,
cos
sin ,
Q
Q
Q
Q
m x
Q
S
Q
m x
m
g
S
m
g
(5)
6
cos
sin
Q
S
x
g
m
.
(6)
Dynamiczne równanie różniczkowe dla bloczka o ciężarze
P
jest następujące:
1
o
J
S R
S R
,
(7)
gdzie:
o
J
– masowy moment bezwładności bloczka względem osi obrotu,
R
– promieo
walca (bloczka);
0.5
z
R
d
,
1
S
– siła w nici od strony ciężarka G wymuszającego ruch układu
mechanicznego.
Dynamiczne równanie różniczkowe dla ciężarka
G
G
m
g
wymuszającego ruch układu
mechanicznego jest następujące:
1
G
G
m
z
m g
S
.
(8)
Zakładając brak poślizgów linki na bloczku i jej nierozciągliwośd można zapisad, że z
x
,
więc z
x
. Z równania (8) wyznaczono
1
S
i podstawiono do równania (7) otrzymując:
(
)
o
G
G
J
S R
m g
m x R
.
(9)
Uwzględniając w równaniu (6), zależnośd między przyspieszeniem liniowym klocka Q , a
przyspieszeniem kątowym bloczka, x
R
oraz mając na uwadze równanie (9) otrzymamy
układ równao z dwiema niewiadomymi S i
:
cos
sin
,
(
)
Q
o
G
G
S
R
g
m
J
S R
m g
m
R R
(10)
Po rozwiązaniu układu równao ze względu na S będziemy mieli następujące wyrażenie na
poszukiwaną siłę napięcia linki:
2
2
2
2
cos
sin
2
2
2
2
z
z
G
o
G
z
o
G
z
Q
d
d
m g
g
J
m
S
d
J
m
d
m
.
(11)
7
gdzie:
– współczynnik tarcia,
g
– przyspieszenie ziemskie. Współczynnik tarcia wyznaczony
został eksperymentalnie w dwiczeniu „Doświadczalne wyznaczenie współczynnika tarcia
kinetycznego”.
podano wartości niektórych współczynników tarcia suchego (statycznego i
kinetycznego), które można wykorzystad w dwiczeniu dla wybranych par trących. Bloczek jest
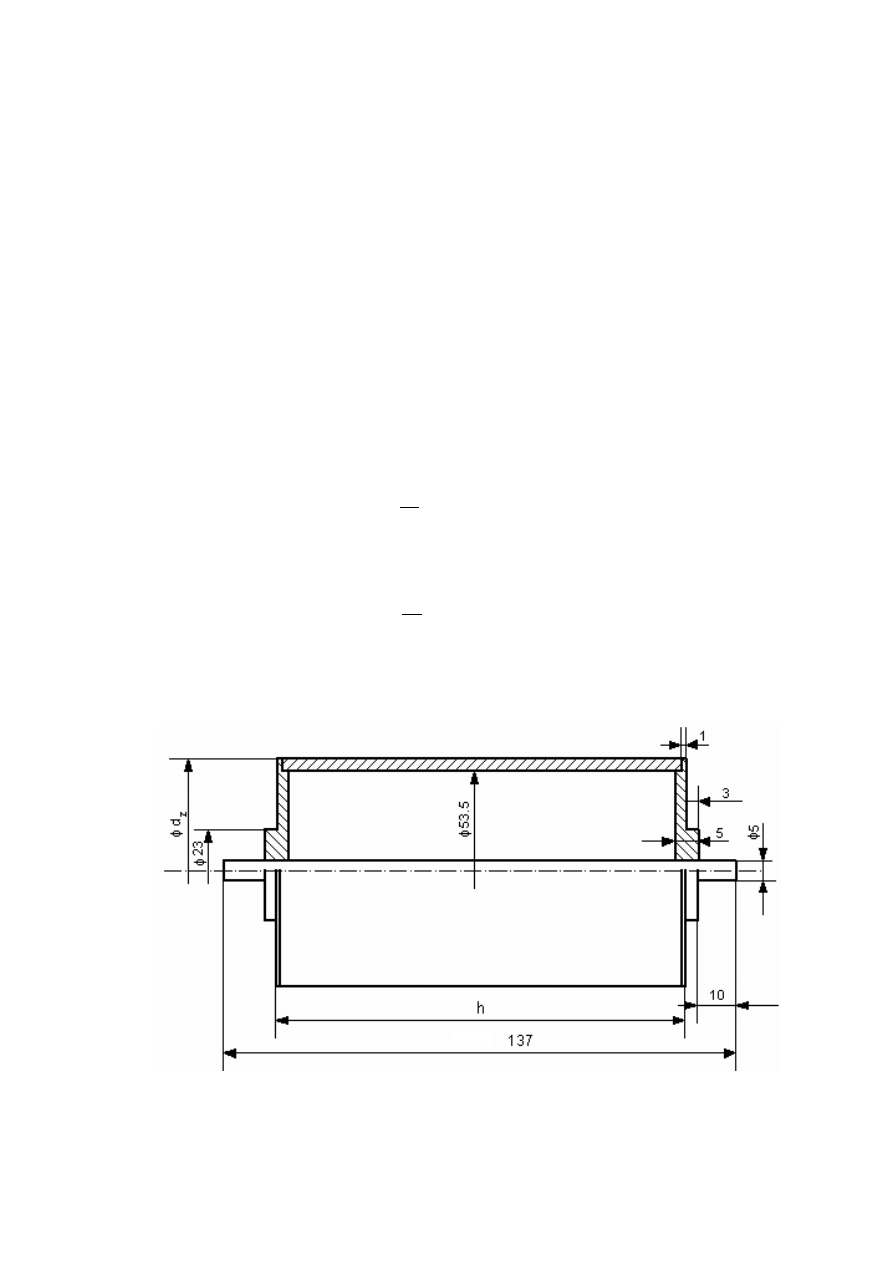
cienkościenną aluminiową rurą o długości h i średnicy wewnętrznej
53.5
oraz
zewnętrznej
z
d
. Otwory w rurze są zaślepione 2 tarczami. Wzdłuż osi bloczka biegnie
stalowa oś obrotowa o średnicy
5
i długości
137
l
, która jest zespolona z bloczkiem
(na wcisk).
Do wyznaczenia momentu bezwładności całego bloczka (wraz z osią) można
wykorzystad następujące wzory:
moment bezwładności rury względem osi geometrycznej:
4
4
1
32
rury
z
w
J
h d
d
,
(12)
moment bezwładności walca względem osi geometrycznej:
4
1
32
walca
z
J
h
d
,
(13)
gdzie:
– gęstośd materiału,
z
d
– średnica zewnętrzna,
w
d
– średnica wewnętrzna, h -
wysokośd walca.
Rys. 6. Wymiary geometryczne bloczka
8
4. PRZEBIEG DWICZENIA
W celu przeprowadzenia dwiczenia należy:
1. Zapoznad się z budową stanowiska i sposobem pomiaru naciągu linki.
2. Uruchomid wzmacniacz pomiarowy Spider 8 i program Catman Express 3.1 –
rejestrujący sygnały pomiarowe (względne przyrosty napięcia). Do obsługi
wzmacniacza pomiarowego Spider 8 i programu Catman Express 3.1 wymagane jest
przeczytanie oddzielnej instrukcji [1].
3. Wyznaczyd charakterystykę statyczną przetwarzania przetwornika obciążając go
odważnikami o znanej masie oraz mierząc odpowiadające im względne przyrosty
napięd.
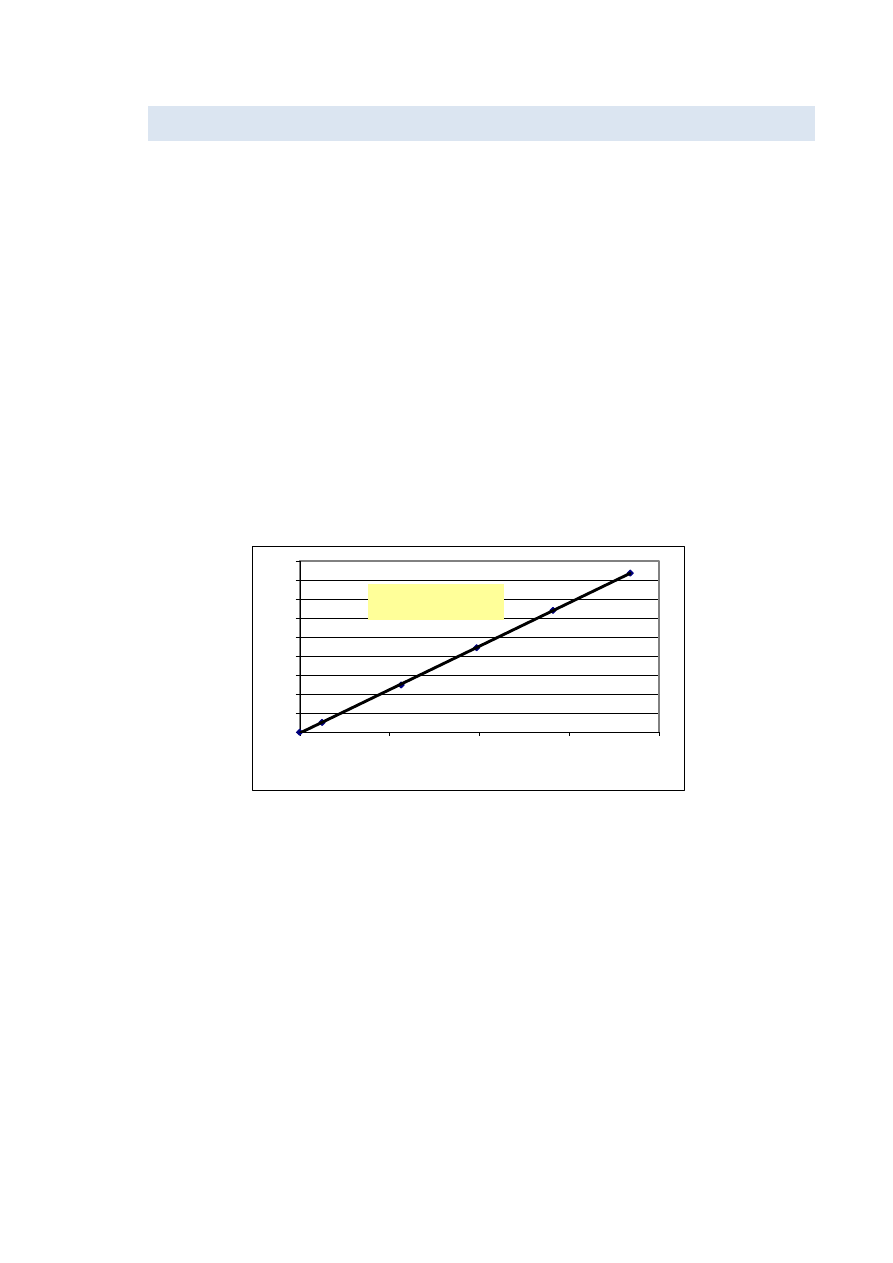
4. W programie MS Excel [2] sporządzid wykres przedstawiający uzyskane zależności, tj.
względny przyrost napięcia – siła (
). Otrzymany zbiór punktów aproksymowad
równaniem prostej i wyznaczyd jej równanie.
Rys. 7. Charakterystyka statyczna przetwarzania przetwornika siły
5. Zmierzyd średnicę
z
d
i szerokośd h bloczka.
6. Zamocowad wkładki cierne z wybranego materiału w gnieździe klocka.
7. Określid masę klocka Q łącznie z wkładkami oraz ciężarka G (wraz z szalką) wpisując
. Zawiesid na szalce ciężarek G o takiej masie, aby wywołał ruch
klocka Q w górę.
8. Ustawid równię pochyłą pod kątem
(za pomocą pokrętła umieszczonego pod
torem pomiarowym); wartośd kąta odczytad ze skali i wpisad do
9. Ustawid klocek na prowadnicy w pozycji dolnej skrajnej.
y = 22.827x - 0.0442
R² = 0.9999
0
1
2
3
4
5
6
7
8
9
0
0.1
0.2
0.3
0.4
S
[
N
]
D
u/u [mV/V]
9
10. Zwolnid klocek o ciężarze Q , zarejestrowad wartości względnych przyrostów napięd
generowanych w tensometrycznym przetworniku siły (pośrednio jest mierzona
wartości siły S ).
11. Próbę powtórzyd trzykrotnie dla wybranego rodzaju okładzin ciernych klocka Q .
Uzyskane z pomiarów dane zapisad w arkuszu MS Excela, przeprowadzid konwersję
wartości wielkości elektrycznych na mechaniczne według wyznaczonego uprzednio
równania prostej (punkt 3 i 4).
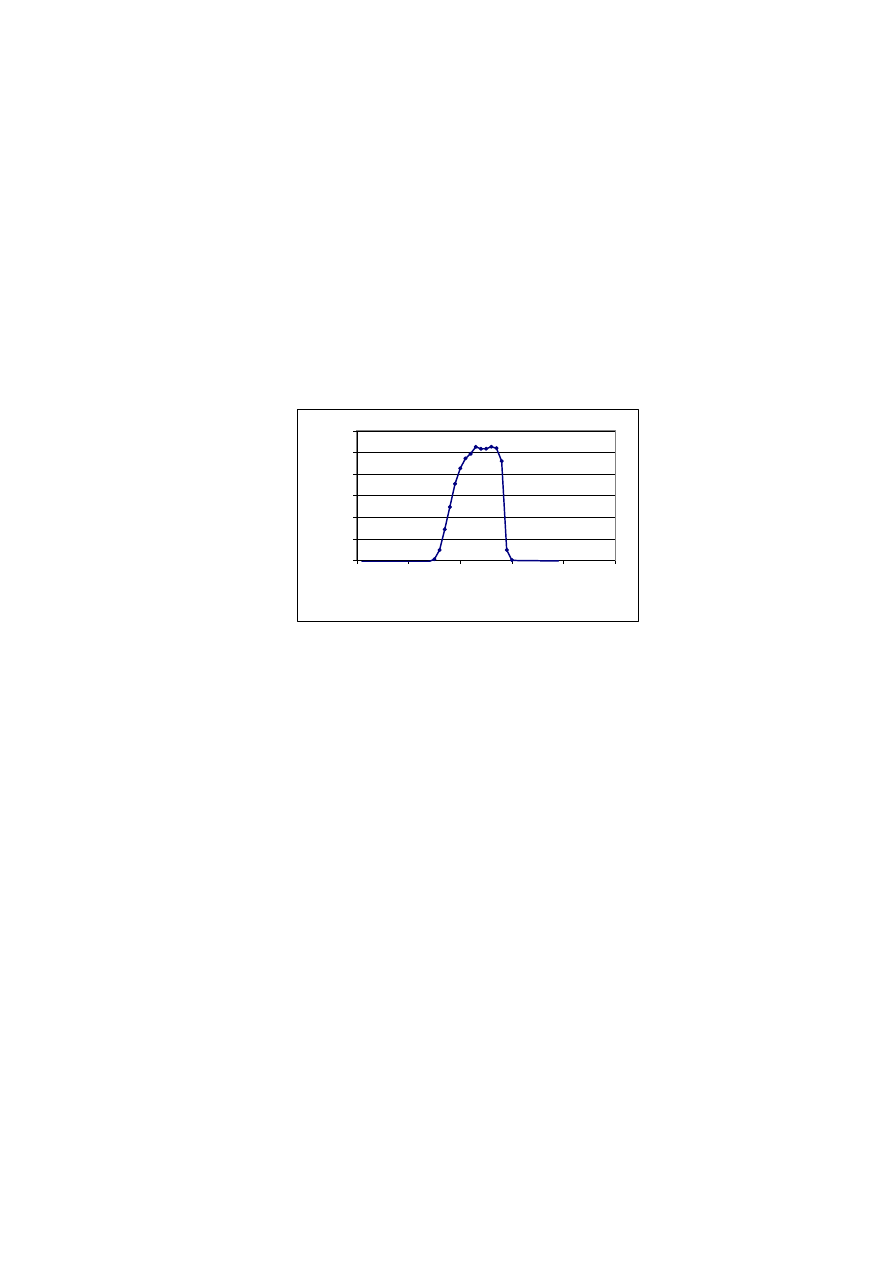
12. Sporządzid w arkuszu MS Excel wykres przedstawiający zależnośd siły S od czasu (
); wyznaczyd maksymalną wartośd siły w czasie eksperymentu, a otrzymane wyniki
Rys. 8. Wykres zmienności siły napięcia linki w czasie doświadczenia
13. Zrealizowad serię pomiarów dla różnych par materiałów powtarzając punkty 6–12.
14. Obliczyd wartośd momentu bezwładności bloczka
o
J
wykorzystując wzory (12) – (13)
i znaną gęstośd stopu aluminium i stali (
Al
i
stal
).
15. Wyznaczyd wartości siły napięcia linki
.
analit
S
ze wzoru (11) i porównad ją z
maksymalną wartością siły
.
eksp
S
uzyskaną z pomiarów (dla różnych rodzajów
materiałów wkładek klocka Q ).
16. Wartości sił
.
eksp
S
i
.
analit
S
dla testowanych rodzajów materiałów zamieścid w
0
2
4
6
8
10
12
0
0.2
0.4
0.6
0.8
1
Si
ła
S
eksp
.
[N
]
czas t [s]
10
5. WYNIKI POMIARÓW I OBLICZEO
Wyniki uzyskane z eksperymentu oraz obliczone ze wzorów zestawid w poniższych tabelach.
Tab. 2. Wyniki pomiarów
Numer
pomiaru
z
d
h
Al
stal
o
J
i
G
m
Q
m
.
eksp
S
[m]
[m]
[kg/m
3
]
[kg/m
3
]
[kg m
2
]
*°+
–
[kg]
[kg]
[N]
1
2
3
Średnia
Tab. 3. Zestawienie wyników obliczeo
Materiał wkładki
.
eksp
S
[N]
.
analit
S
[N]
równanie (11)
equation
reference goes
hereequation
reference goes
here
Stal – stal
Stop aluminium –stal
Tworzywo sztuczne – stal
Tab. 4. Wartości statycznych i kinetycznych współczynników tarcia suchego [3]
Materiał 1
Materiał 2
współczynnik tarcia
statyczny
kinetyczny
stal miękka
stal miękka
0.74
0.57
aluminium
stal miękka
0.61
0.47
miedź
stal miękka
0.53
0.36
stal
poliamid 66
–
0.25
stal
mosiądz
0.35
–
stal miękka
mosiądz
0.51
0.44
stal miękka
żeliwo
–
0.23
stal twarda
polietylen
0.2
stal twarda
polistyren
0.3-0.35
–
stal twarda
stal twarda
0.78
0.42
stal miękka
ołów
0.95
0.95

11
6. WNIOSKI
Przeanalizowad ewentualne przyczyny, które mogą mied wpływ na różnicę między
wartością siły napięcia
.
analit
S
w lince wyznaczoną z równania (11), a jej odpowiednikiem
eksperymentalnym
.
eksp
S
. Jak moment bezwładności bloczka
o
J
wpływa na wartośd siły
.
analit
S
wyznaczonej z równania (11)?
Literatura
1. Uścinowicz Robert: Instrukcja obsługi wzmacniacza Spider 8 i programu Catman
Express 3.1, Białystok, 2007.
2. Instrukcja obsługi programu Microsoft Office Excel, 2000.
3. Strona
internetowa
f-my
Roymech.
Dostępna
w
Internecie:
http://www.roymech.co.uk/Useful_Tables/Tribology/co_of_frict.htm
Wyszukiwarka
Podobne podstrony:
3 badanie dynamiki ruchu układu mechaniczego
badanie dynamiki ruchu ściąga(1)
badanie dynamiki ruchu ściąga
1 Badanie dynamiki ruchu obrotowego 12
OII01 Badanie dynamiki ruchu ob Nieznany
Symulacja E ogarnijtemat.com, SiMR inżynierskie, Semestr 4, Laboratorium Mechaniki Płynów, Ćwiczenia
sprawko przeplyw nasze ogarnijtemat.com, SiMR inżynierskie, Semestr 4, Laboratorium Mechaniki Płynów
Grunty cw 5 boro(P.r.e.z.e.s), Laboratorium z mechaniki gruntów i fundamentowania
Grunty cw 5 boro(P.r.e.z.e.s), Laboratorium z mechaniki gruntów i fundamentowania
Sprawozdanie z laboratorium nr 3, Badanie Własności mechanicznych materiałów
Grunty cw 4a Boro(P.r.e.z.e.s), Laboratorium z mechaniki gruntów i fundamentowania
ćw.A. Lepkość ogarnijtemat.com, SiMR inżynierskie, Semestr 4, Laboratorium Mechaniki Płynów, Ćwiczen
Tlumienie dynamiczne w ukladach sprezystych, sem III, +Mechanika Techniczna II - Wykład.Ćwiczenia.La
Układ pomp, 06. Praca układu pomp odśrodkowych - 3 (4.0), Sprawozdanie z laboratorium mechaniki płyn
TARCIE, PW Transport, Gadżety i pomoce PW CD2, MECHANIKA, MECHANIKA !!, mechanika techniczna - labor
LABORATORIUM Z MECHANIKI GRUNTÓW, BUDOWNICTWO, INŻ, semestr 4, Mechanika gruntów, mechanika gruntów
więcej podobnych podstron