1. Def inteligencji , zagrożenia i perspektywy rozwoju sztucznej inteligencji.
Inteligencja – uzdolnienie intelektualne , jest to zdolność do penetrowania informacji
na poziomie abstrakcyjnym, to zdolnośc do twórczego , a nie tylko mechanicznego
penetrowania info ,czyli tworzenia zupełnie nowych pojec i ich zastosowania
2. Budowa ludzkiego mózgu
V=1400cm
3
A=2000cm
2
M=1,5 kg
W korze mozgowej (3mm grubości) zawiera się 10
18
neuronów z czeko 10
11
połączonych i 10
15
połączeń
Długość połączeń :0,01 mm do kilku m
Cz. pracy od 1 do 100 Hz
Impulsy przychodzące od 1 do 2 ms
Napięcie 100 mV
Szybkość przesylu miedzy Komorkami nerwowymi 100 m/s
Budowa mózgu nie jest do konca rozpoznana, znane są tylko obrazy o różnych
zastosowaniach . Pamięć zalezy od połączeń między neuronoami
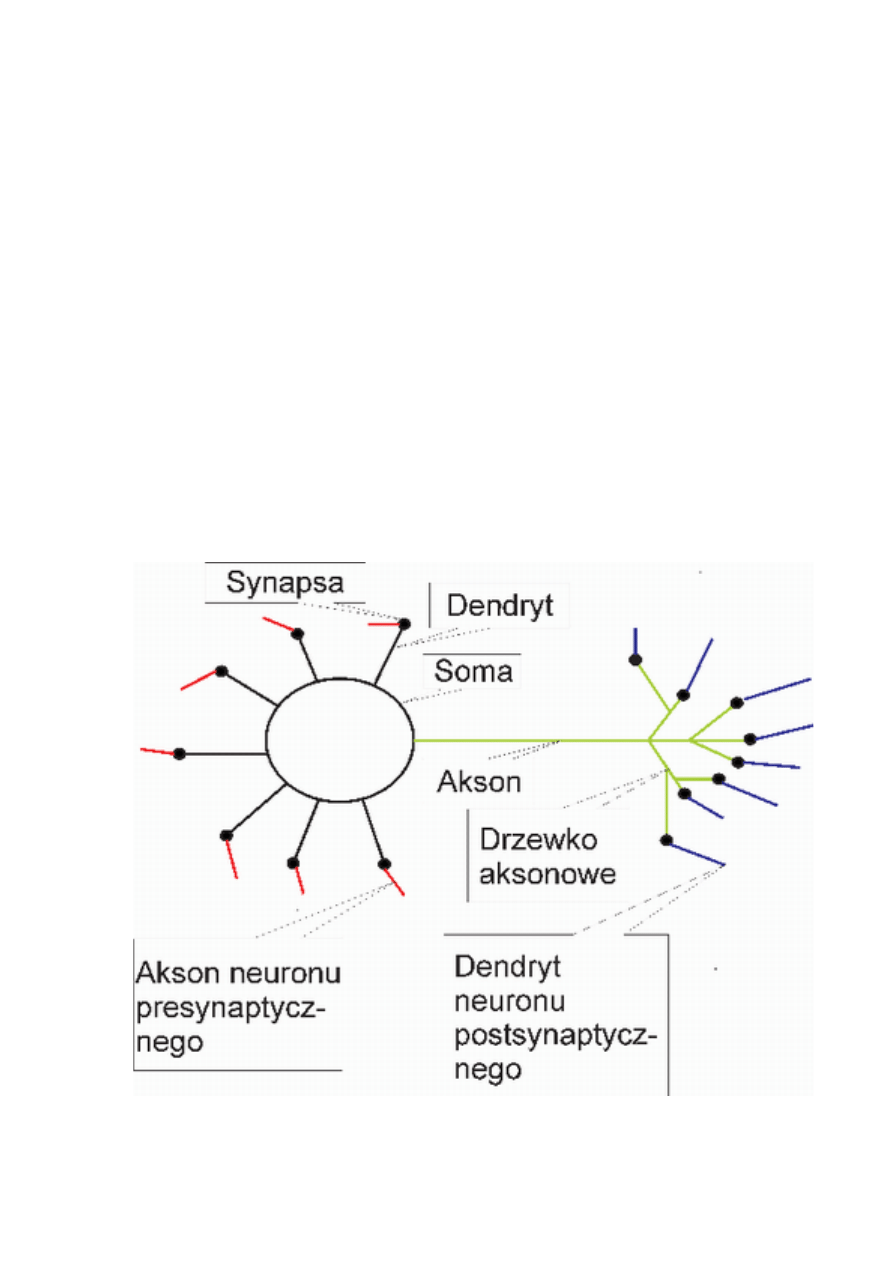
3. budowa ludzkiego neuronu
Soma-cialo komorki , dendryt – wejście , akson –wyjscie , dużo dendrytów , jeden akson
– z którego do wielu neuronów można wysłać inf. Pobudzenie przekazywane przez
złącze zwane synapsą
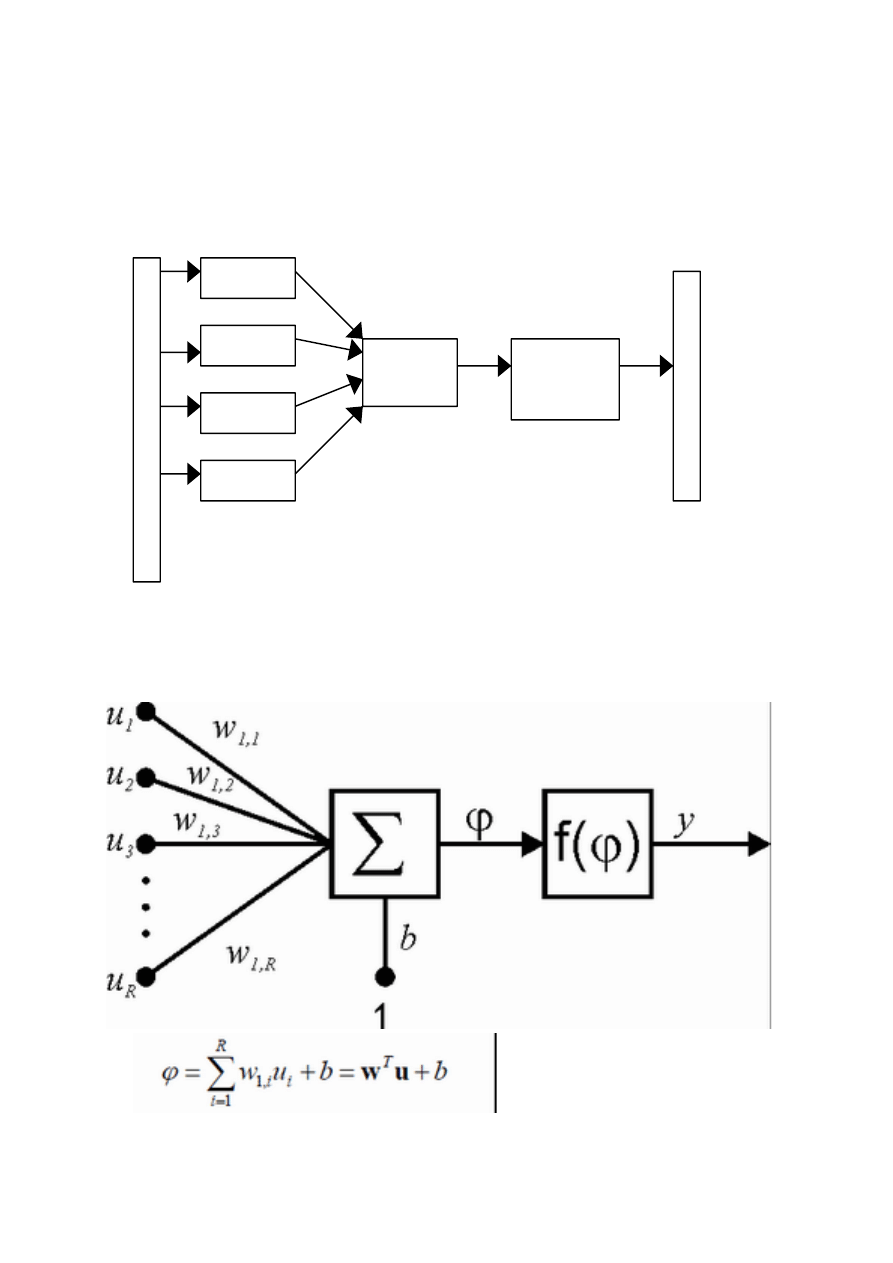
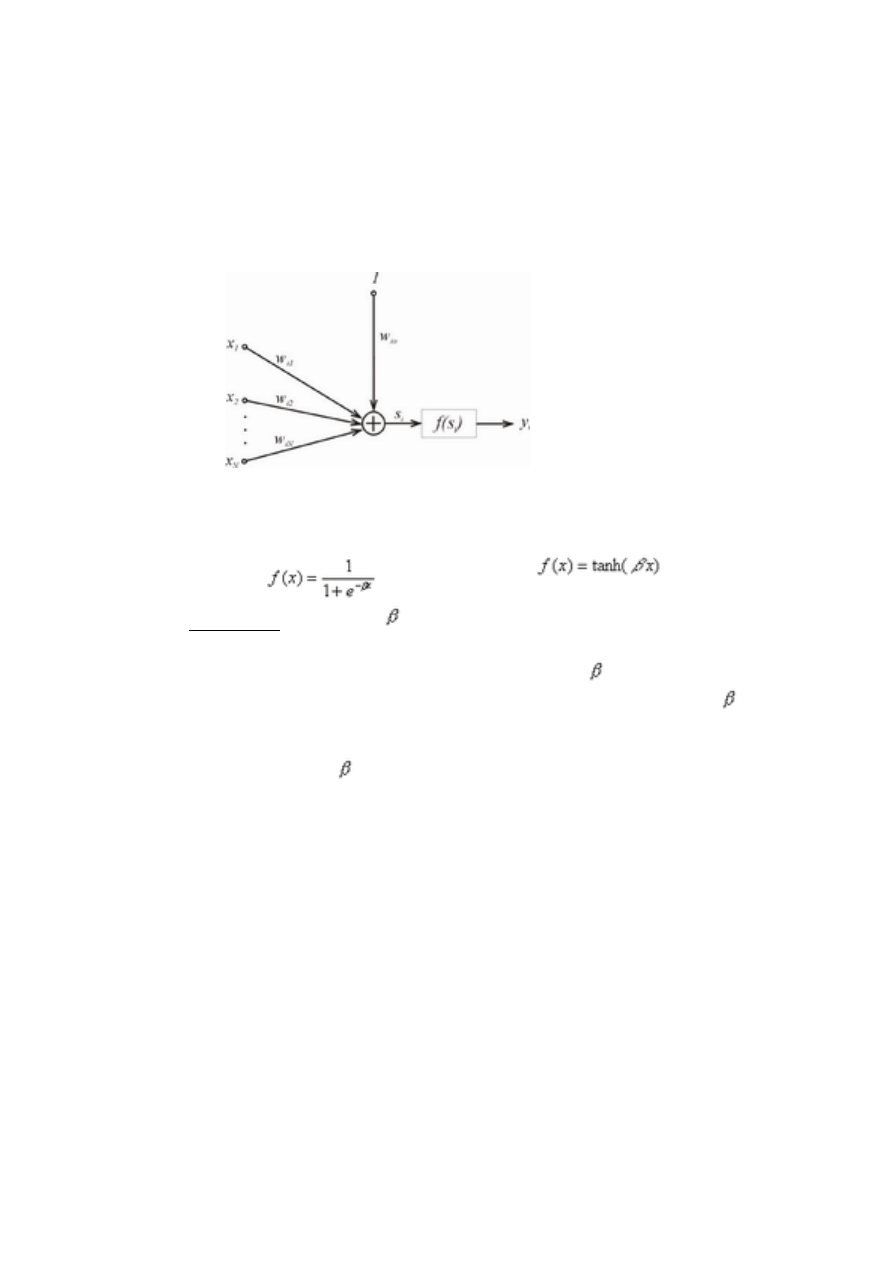
4. budowa i równanie sztucznego neuronu
Wagi pełnią rolę synaps, f. aktywacji określa wartość na wyjściu, podczas uczenia,
zmianą podlegają wartości wag.
W
e
j
ś
c
i
e
Waga 1
Waga 2
Waga 3
Waga n
Sumator
Funkcja
aktywacji
W
y
j
ś
c
i
e
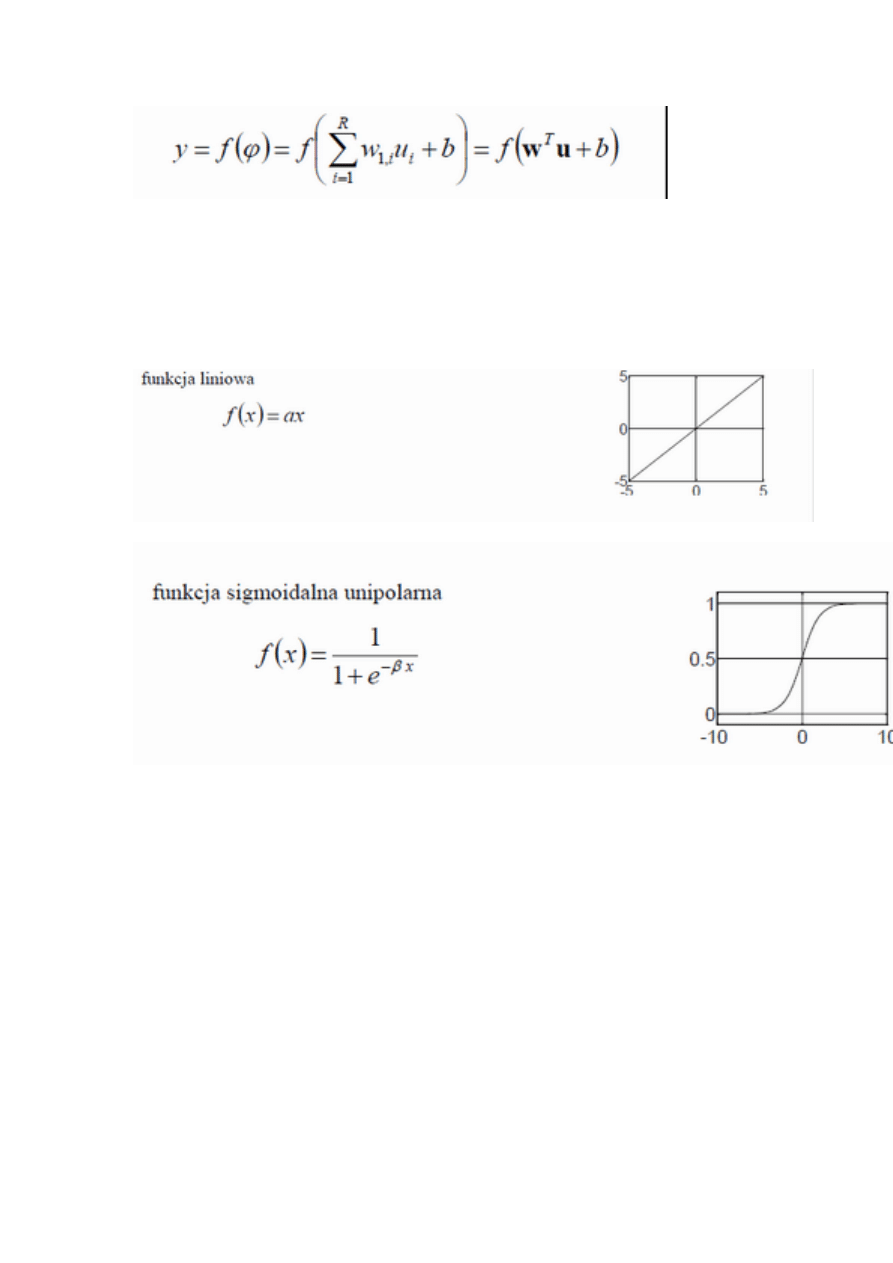
5. funkcje aktywacyjne neuronow
Funkcja aktywacji, w zależności od konkretnego celu, jakiemu służy neuron, może przyjmować różne
postacie.
-skokowa : od 0 do 1
od minus jeden do plus jeden
-
liniowa
-sigmoidalna (0d 0 do 1 v -1 do 1)
Gdy b-> nieskończoność – wtedy skokowa
Zaleta f. sigmoidalnej jest ciągłość funkcji.
-gaussa (neurony radialne)
-liniowa z ograniczeniem
6. dzialanie neuronu dwuwejściowego. Granica decyzyjna
W przypadku neuronu 2-wejściowego granica decyzyjną wyznacza się dla fi=0.
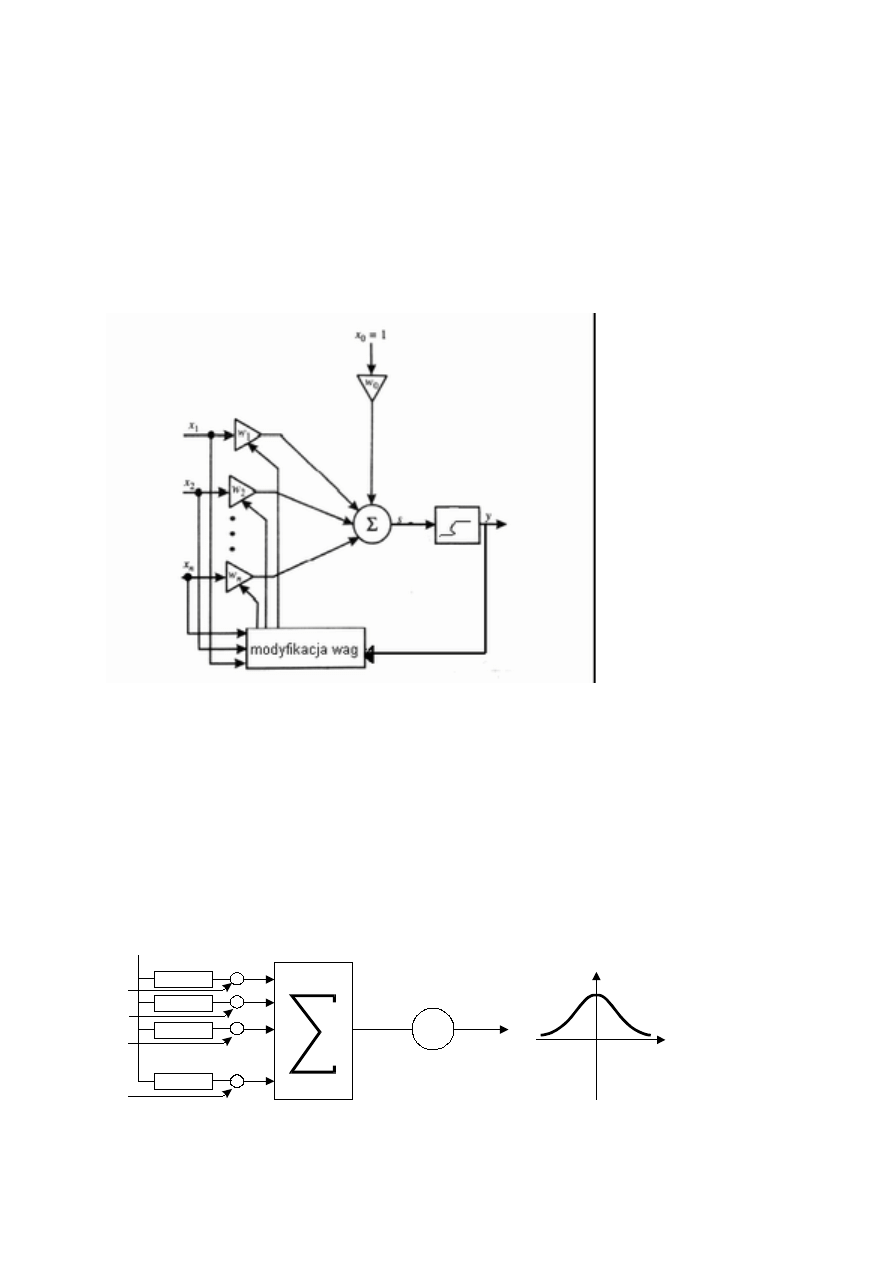
7. metody uczenia neuronow. reguła delta
Metody uczenia :
-nadzorowana (z nauczycielem) – podanie na wejście sygnału przy znanej odpowiedzi,
jeśli generuje poprawny wynik to waga się nie zmienia
-nienadzorowana – mniej skuteczna z opracowaną funkcja określającą zmianę wag
Z nauczycielem – met. Widrowa-Hoffa : metoda delta
)
(
)
(
)
1
(
y
d
x
W
W
W
W
i
i
i
t
i
t
i
−
=
∆
∆
+
=
+
x
i
=u
i
- wekście , d-sygnał od nauczyciela
)
(
*
y
d
u
W
i
i
−
=
∆
η
η
-współczynnik uczenia się: (0:1)
Bez nauczyciela – met. Hebba
??????????
)
,
(
*
y
u
W
i
i
η
=
∆
η
- im wieksze tym szybciej się uczy neuron, ale czasem może się nigdy nie nauczyc
Reguła delta : Z regułą delta mamy do czynienia, gdy uaktualnianie wag następuje
każdorazowo po prezentacji jednej pary uczącej. Gdy uaktualnianie zachodzi po prezentacji
wszystkich par uczących mamy wtedy do czynienia z tzw. skumulowaną regułą delta.
Reguła delta przeznaczona jest dla neuronów z ciągłymi funkcjami aktywacji i stanowi
odpowiednik reguły perceptronowej. Nazywa jest ona również ciągłą regułą perceptronową.
Metoda ta łatwo daje się wprowadzić jako wynik minimalizacji kwadratowego kryterium
błędu. Jej uogólnioną wersję można wykorzystać w sieciach wielowarstwowych.
8. Uczenie nadzorowanie perceptronu , równanie uczenia
Równanie uczenia:
)
(
*
...)
(
*
)]
(
)
(
[
)
(
)
1
(
'
n
u
n
f
n
y
n
d
n
w
n
w
i
−
+
=
+
η
Uczenie : powstaje problem bo posiadamy tylko sygnał wyjściowy nie wiemy co jest w
warstwach ukrytych ( błąd się nawarstwia z warstwy na warstwe). Błąd neuronu mnoży się
razy wagę wyjścia
9. struktura programu modelującego neuron
- tworzenie wektorów uczących
- tworzenie sieci neuronowej przy użyciu funkcji net=newff()
- określanie liczby epok
- inicjacja wag sieci
- obliczanie odpowiedzi nie wytrenowanej sieci na wektor wyjściowy
- uczenie sieci
10. wpływ danych uczących (wejściowych) oraz współczynnika n na uczenie
perceptronu.
η
- im wieksze tym szybciej się uczy neuron, ale czasem może się nigdy nie nauczyc
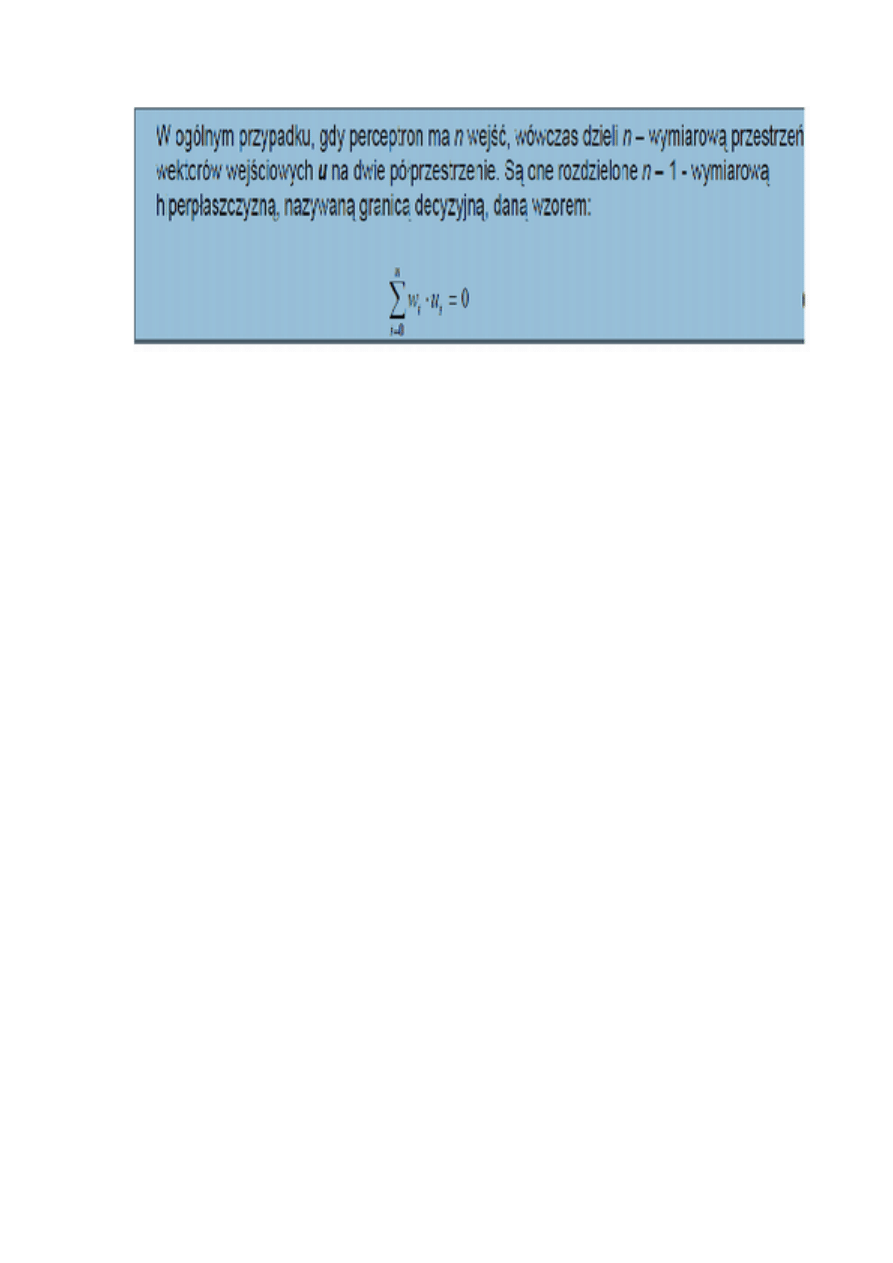
11. ograniczenia perceptronu
Perceptron dzieli płaszczyzny na 2 pół płaszczyzny. W ogólności perceptron jest wielowejściowy. Taki
perceptron dzieli przestrzeń n wymiarową na dwie powierzchnie
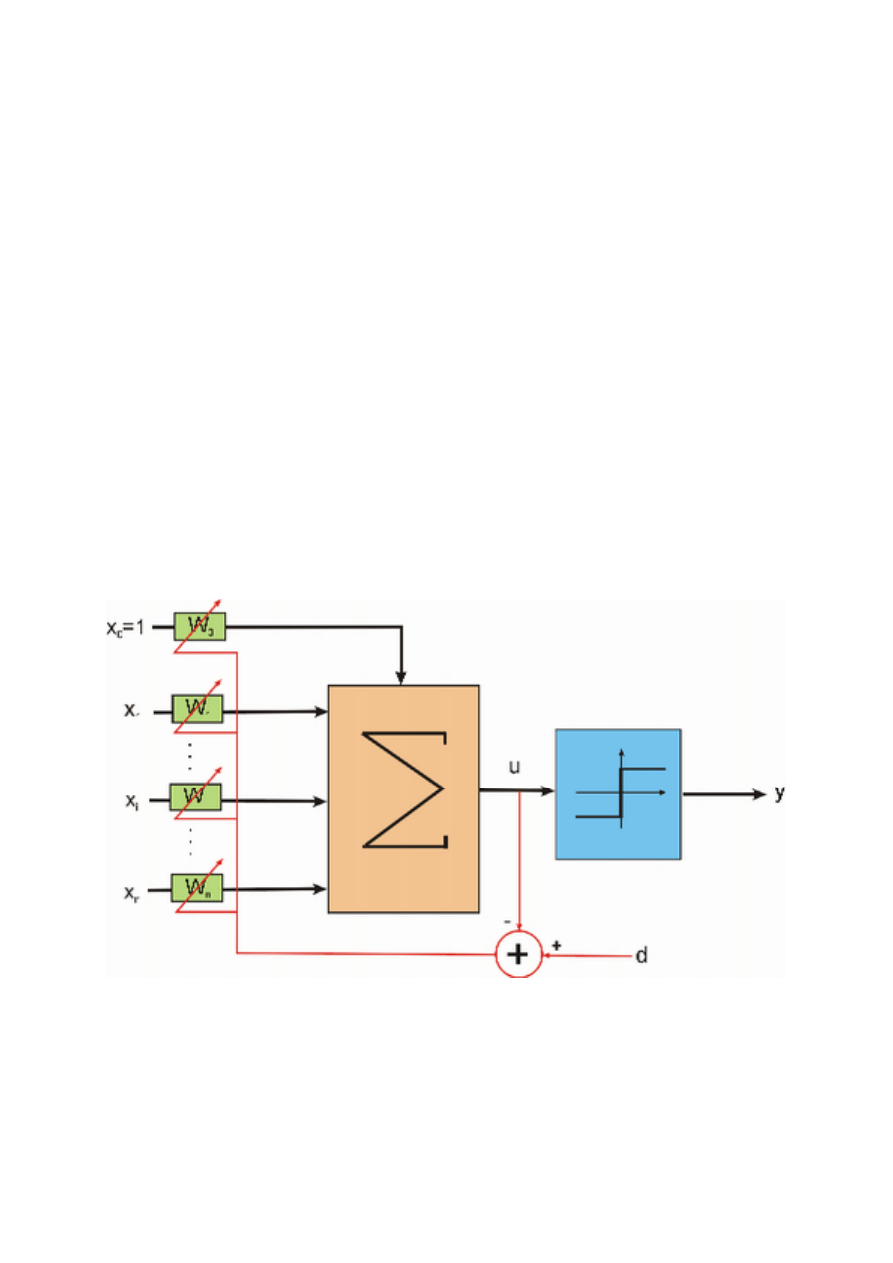
12. adaline, budowa , uczenie (algorytm LMS)
ADALINE-adaptive-linear-neuron/element
Błąd bierzemy sprzed funkcji aktywacji (w odróżnieniu od modelu McCullocha)
Budowa:
LMS- met. najmniejszych kwadratów
Uczenie : algorytm Widrowa-Hoffa
a) inicjalizacja wag i wartości progowych =w(0)
b) podanie na wejścia sieci neuronowej nowego obrazu (?)
2
2
1
)]
(
)........
(
)..
(
..
1
[
)
(
n
u
n
u
n
u
n
n
m
=
c) wyznaczenie y a następnie błędu
2
2
))
(
)
(
(
)
(
n
y
n
d
n
−
=
ε
d) zakończyć jeżeli
)
(
2
n
ε
większe od zadanej dokładności
e) adaptacja wektora wag
)
(
)
1
(
n
w
n
w
=
+
13. neuron sigmoidalny, budowa , uczenie -> równanie uczenia
Budowa:
Neuron typu sigmoidalnego ma strukturę podobną do modelu McCullocha-Pittsa, z tą
różnicą, że w przeciwieństwie do perceptronu funkcja aktywacji jest ciągła i przyjmuje
postać funkcji sigmoidalnej unipolarnej (0,1) lub bipolarnej (-1,1). Funkcja unipolarna
ma zwykle postać
, natomiast bipolarna
(inaczej
1
)
exp(
1
2
)
(
−
−
+
=
s
s
f
β
)
Parametr
jest dobierany przez użytkownika i jego wartość
wpływa na kształt funkcji aktywacji. Przy małych wartościach
funkcja ma mały kąt
nachylenia, w miarę wzrostu jej wartości przebieg staje się bardziej stromy. Przy
dążącym do nieskończoności funkcja sigmoidalna przechodzi w funkcję skokową,
identyczną z funkcją aktywacji perceptronu. W praktyce przyjmuje się najczęściej dla
uproszczenia współczynnik
=1
Uczenie neuronu sigmoidalnego odbywa się zwykle w trybie z nauczycielem, przez
minimalizację funkcji celu, podobnie jak w przypadku perceptronu.
Założenie ciągłej funkcji aktywacji umożliwia zastosowanie w uczeniu metody
gradientowej. Najprościej jest przyjąć metodę największego spadku, zgodnie z którą
aktualizacja wektora wag odbywa się w kierunku ujemnego gradientu funkcji celu
Równanie uczenia:
)
(
*
...)
(
*
)]
(
)
(
[
)
(
)
1
(
'
n
u
n
f
n
y
n
d
n
w
n
w
i
−
+
=
+
η
14. neuron hebba, budowa, uczenie -> metody uczenia , równania (z i bez
nauczyciela)
Siec hebba powinna odkryc bez dodatkowej pomocy wzajemne zależności, uczenie bez
nauczyciela jest skuteczne, gdy mamy nadmiarowe dane uczące. Cecha niekorzystna jest
niestabilność, brak …..?? , wynikiem uczenia jest wykładniczy wzrost wag.
Równanie modyfikacji wag:
i
i
u
y
w
*
*
η
=
∆
Zgodnie z regułą Hebba zamiana wagi w
ij
neuronu odbywa się proporcjonalnie do iloczynu
jego sygnału wejściowego oraz wyjściowego
15. neuron radialny , budowa ,uczenie
f.aktywacji to f. gaussowska -> łagodnie przechodzi z x na 0.
Dokonuje kołowy podział wokół punkutu.
y
x-t
1
1
f
r
n
...
f
r
n
x
t
n
1
t
1
x
Agregacja sygnałów wejściowych
w tym typie neuronu polega na obliczaniu odległości pomiędzy obecnym wektorem wejściowym X
a ustalonym podczas uczenia centroidem pewnego podzbioru T
16. typowe architektury sieci (jednokierunkowa + rekurencyjna)
-jednokierunkowe
-rekurencyjne
-jednowarstwowe
-wielowarstwowe
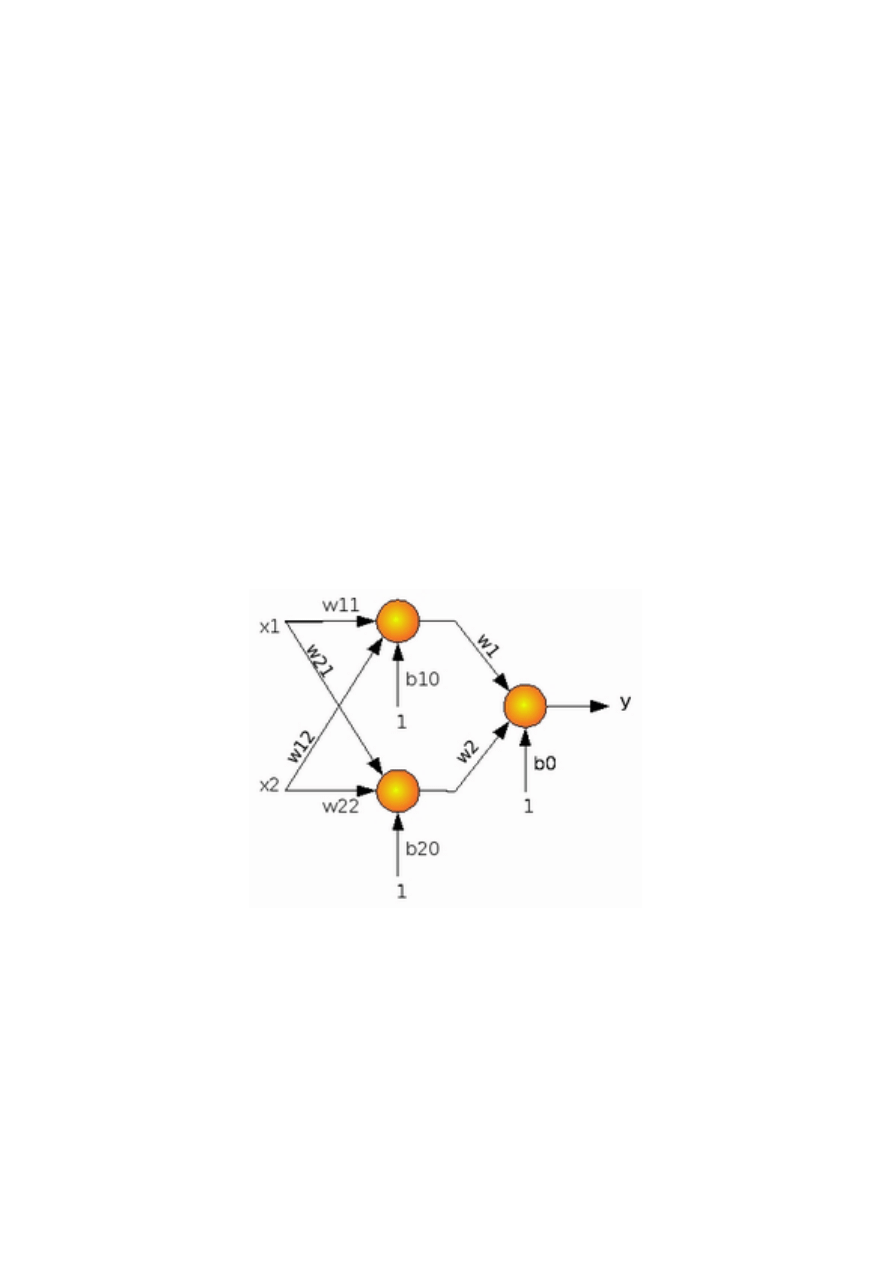
17. rozwiązanie problemu XOR (siec dwu i trój warstwowa perceptronowi)
Do rozwiązania problemu musimy zdefiniować architekturę sieci:
-liczba warstw
-liczba neuronow w każdej warstwie
-funkcje aktywacji neuronow
Zaproponować metode uczenia i jej parametry
Podobnej funkcji natomiast nie da się zrealizować dla funkcji XOR. Wynika to z tego, że nie da się jedną prostą
rozdzielić na dwa obszary płaszczyzny obrazującej funkcję XOR. Zostało to pokazane w aplecie 2. Widać, że
sieć nie może znaleźć optymalnego punktu pracy.S
Efekt ten jest znany jako „PROBLEM XOR”. Aby go rozwiązać wymagane są przynajmniej dwie proste, co
wiąże się z tym, że sieć musi mieć przynajmniej dwie warstwy. Taka struktura sieci została zaprezentowana na
rysunku 2.
Rysunek 2. Sieć składająca się z dwóch warstw.
Dla takiej struktury możliwe jest nauczenie funkcji XOR. Algorytm jaki został wybrany to algorytm ze wsteczną
propagacją błędów.
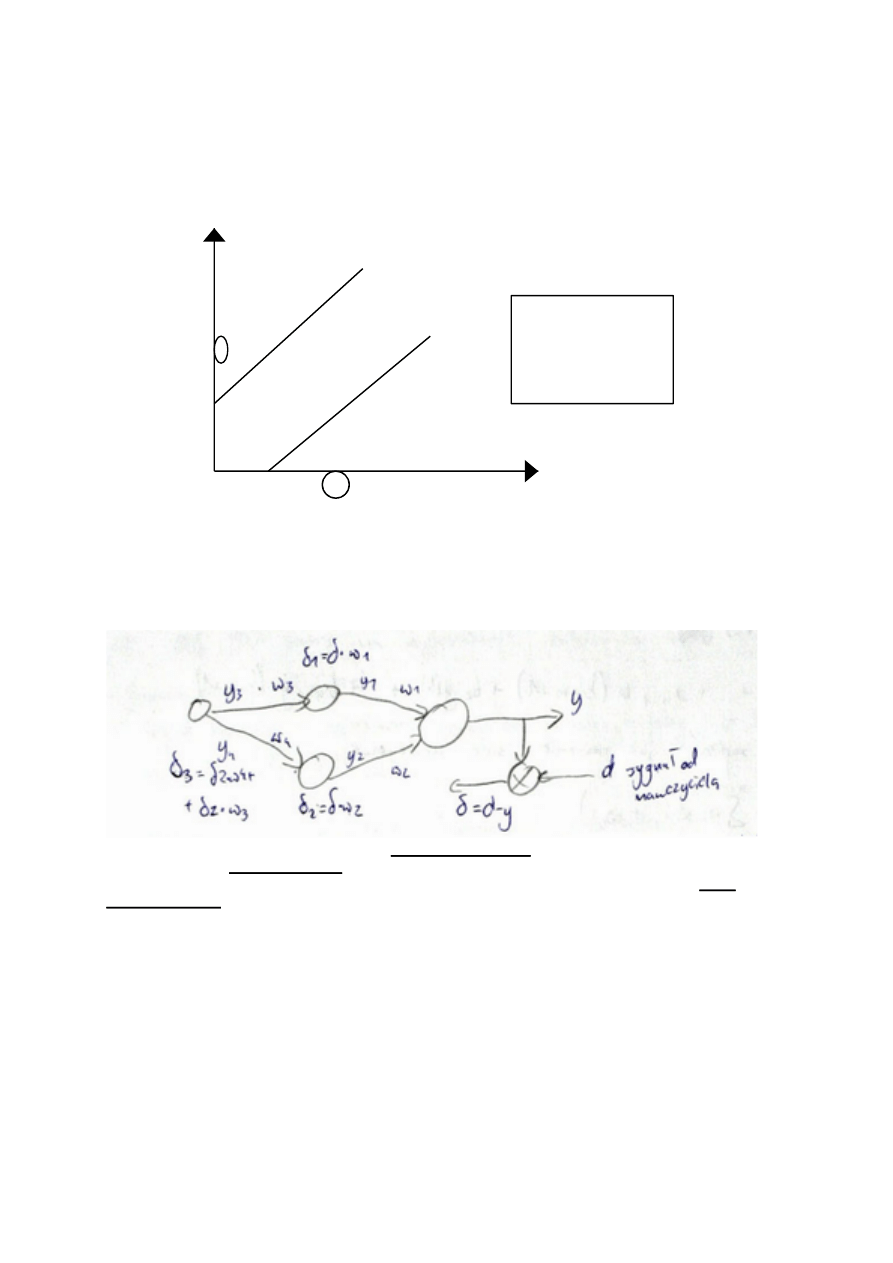
18. algorytm propagacji wstecznej
-jeden z najskuteczniejszych algorytmow uczenia sieci wielowarstwowych
-wyznacza się błąd neuronu wyjściowego (neuronow wyjściowych) i na podstawie tego zmienia się wagi
-błąd popełniony przez dany neuron to suma ważona błędu popełninego przez neurony warstwy wyższej
Propagacja wsteczna - podstawowy algorytm uczenia z nauczycielem wielowarstwowych
jednokierunkowych sieci neuronowych. Podaje on przepis na zmianę wag dowolnych połączeń elementów
przetwarzających rozmieszczonych w sąsiednich warstwach sieci. Oparty jest on na minimalizacji sumy
kwadratów błędów uczenia z wykorzystaniem optymalizacyjnej metody największego spadku. Dzięki
zastosowaniu specyficznego sposobu propagowania błędów uczenia sieci powstałych na jej wyjściu, tj.
przesyłania ich od warstwy wyjściowej do wejściowej, algorytm propagacji wstecznej stał się jednym z
najskuteczniejszych algorytmów uczenia sieci.
19. zast. Ssn do rozpoznawania liter, cech sygnałów
Najpopularniejsze obecnie zastosowanie sieci neuronowych
§
w programach do rozpoznawania pisma (OCR)
§
na lotniskach do sprawdzania, czy prześwietlony bagaż zawiera niebezpieczne ładunki
1
1
Tak należy
podzielic
płaszczyzne
§
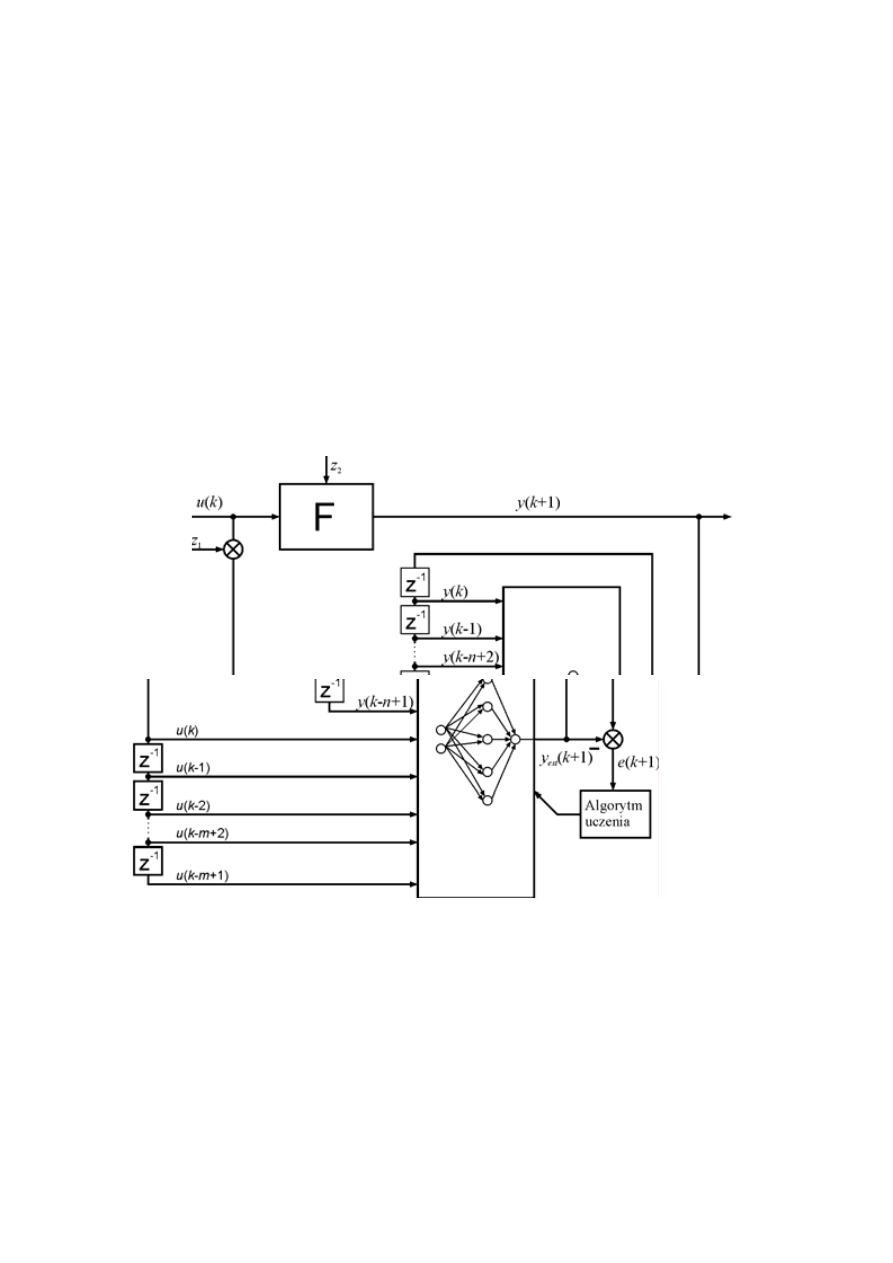
20. model identyfikacji równoległej
Struktura układu z równoległym modelem identyfikacji pokazana jest na rys. 3. W strukturze tej, jednym
z wejść modelu jest jego niezakłócone i niezaszumione wyjście
y
(
k +1
)
est
, co pozwala zwiększyć dokładność
identyfikacji. Sieć neuronowa będąca modelem obiektu F musi być siecią rekurencyjną.
W rozpatrywanej strukturze stabilność modelu identyfikacji z siecią neuronową, z uwagi na
ograniczoność sygnałów wejściowych oraz wyjściowych, nie jest zagwarantowana. W konsekwencji błąd
wyjścia e(k+1) może nie dążyć do zera.
21. def zbiorow klasycznych i rozmytych. Podstawy logiki rozmytej
Element należy do zbioru rozmytego z pewnym stopniem przynależności. Stwierdzenie może być częściowo
prawdziwe lub częściowo fałszywe. Przynależność jest liczba rzeczywista z przedziału 0 - 1. Stopień
przynależności stanowi informację, jak daleko element x jest oddalony od naszego podzbioru X. Określamy go
dzięki funkcji przynależności.
Zbior rozmyty (fuzzy set)
Niech X , dziedzina rozważań, będzie zbiorem pewnych elementow x.
Zbiorem rozmytym A dziedziny rozważań X , nazywamy zbior par:
Gdzie:
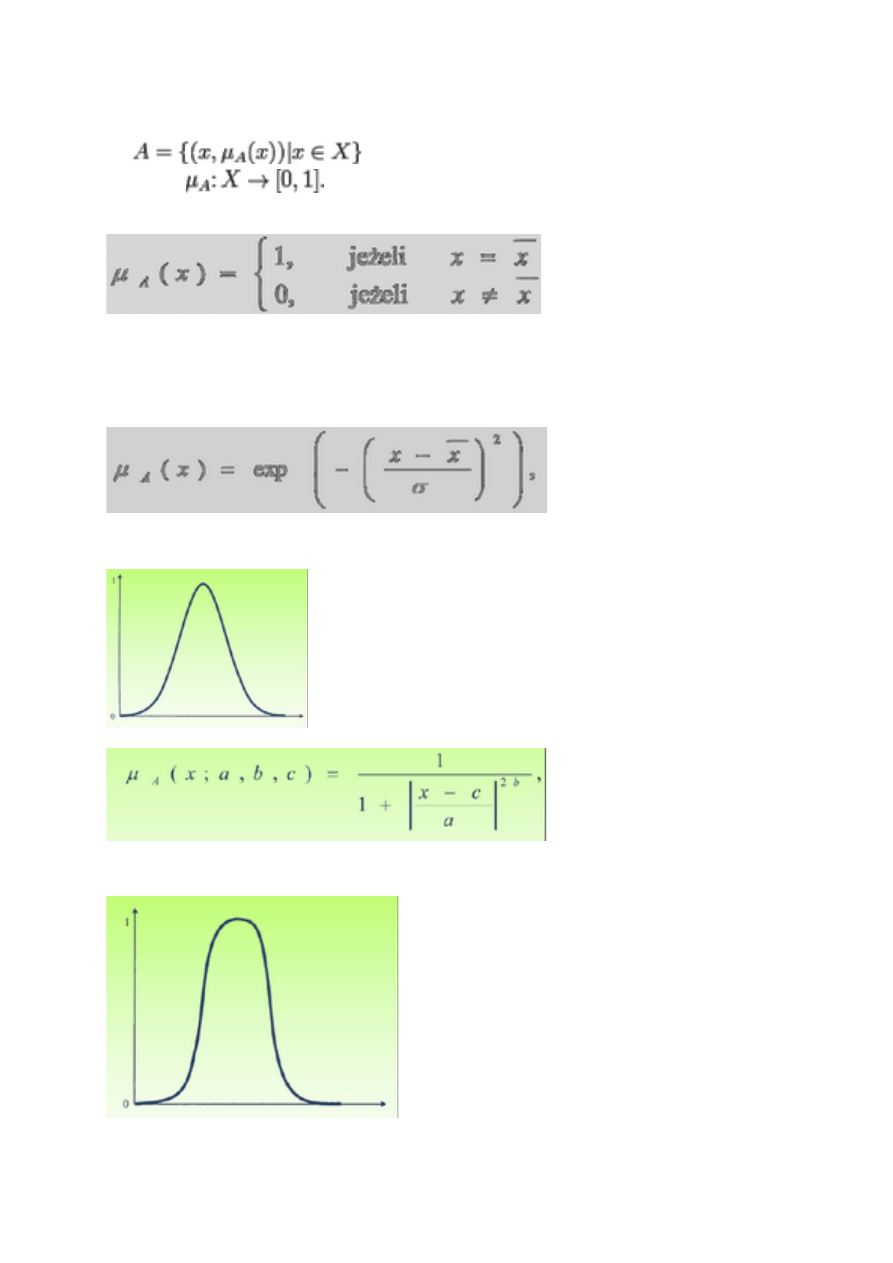
22. funkcje przynależności , rodzaje, kształty
1. Funkcję sigleton definiujemy następująco:
Singleton jest specyficzną funkcją przynależności, gdyż przyjmuje
wartośd 1 tylko w jednym punkcie przestrzeni rozważao,
należącym w pełni do zbioru rozmytego. W pozostałych punktach
przyjmuje wartośd 0.
2. Gaussowska funkcja przynależności:
w którym x jest środkiem, a a określa szerokośd krzywej
gaussowskiej. Jest to najczęściej spotykana funkcja
przynależności.
3. Funkcja przynależności typu dzwonowego
gdzie parametr a określa jej szerokośd, parametr b nachylenie,
natomiast parametr c środek.
4. Funkcja przynależności klasy s
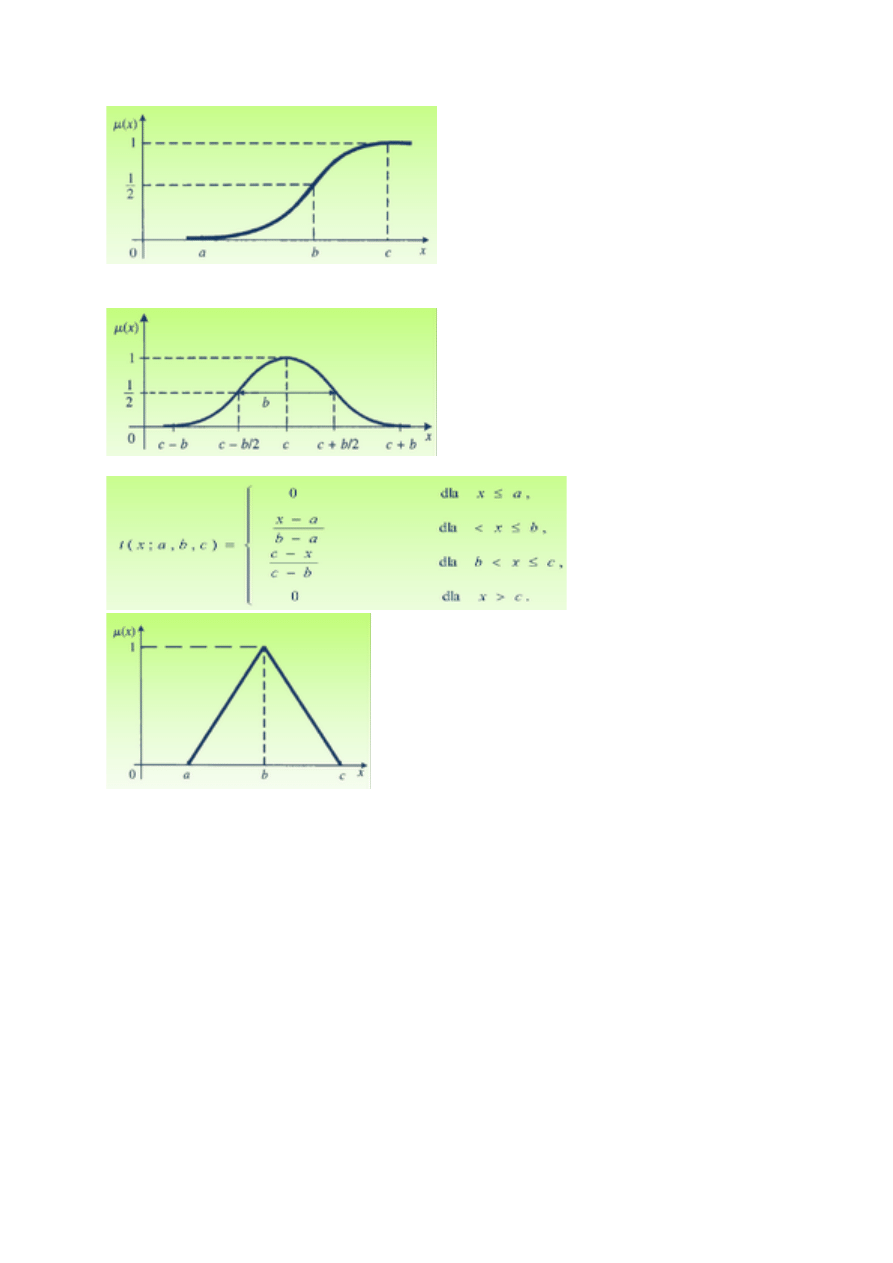
5. Funkcja przynależności klasy PI
7. Funkcja przynależności klasy t
23. na czym polega fuzzyfikacja ? jak się ja wykonuje i jakie SA zakresy
niewrażliwości zmian sygnalu wejściowego na dzialanie regulatora rozmytego
Pierwszym blokiem na jaki trafiają dane wejściowe, jest blok fuzyfikacji. W tym
miejscu ulegają one rozmyciu, czyli zostaje określony stopień przynależności
do poszczególnych zbiorów rozmytych.
Rozmywanie (fuzyfikacja) - operacja przekształcająca sygnały wejściowe z dziedziny
ilościowej na wielkości jakościowe reprezentowane przez zbiory rozmyte na
podstawie określających je funkcji przynależności.
Zmienne wejściowe jak i wyjściowe są wartościami rzeczywistymi, więc w praktyce
zakres ich zmienności jest skalowany w większości zastosowań do domkniętego
przedziału, np. [-1 ; 1]. Operacja taka nazywana jest normalizacją, a przekształcenie
odwrotne - denormalizacją przestrzeni zmiennych. Współczynniki takiej normalizacji
mogą zapewniać zarówno liniowe jak i nieliniowe odwzorowanie. Wartości rozmyte
są więc podzbiorami rozmytymi tych przedziałów.
24. baza regul- budowa
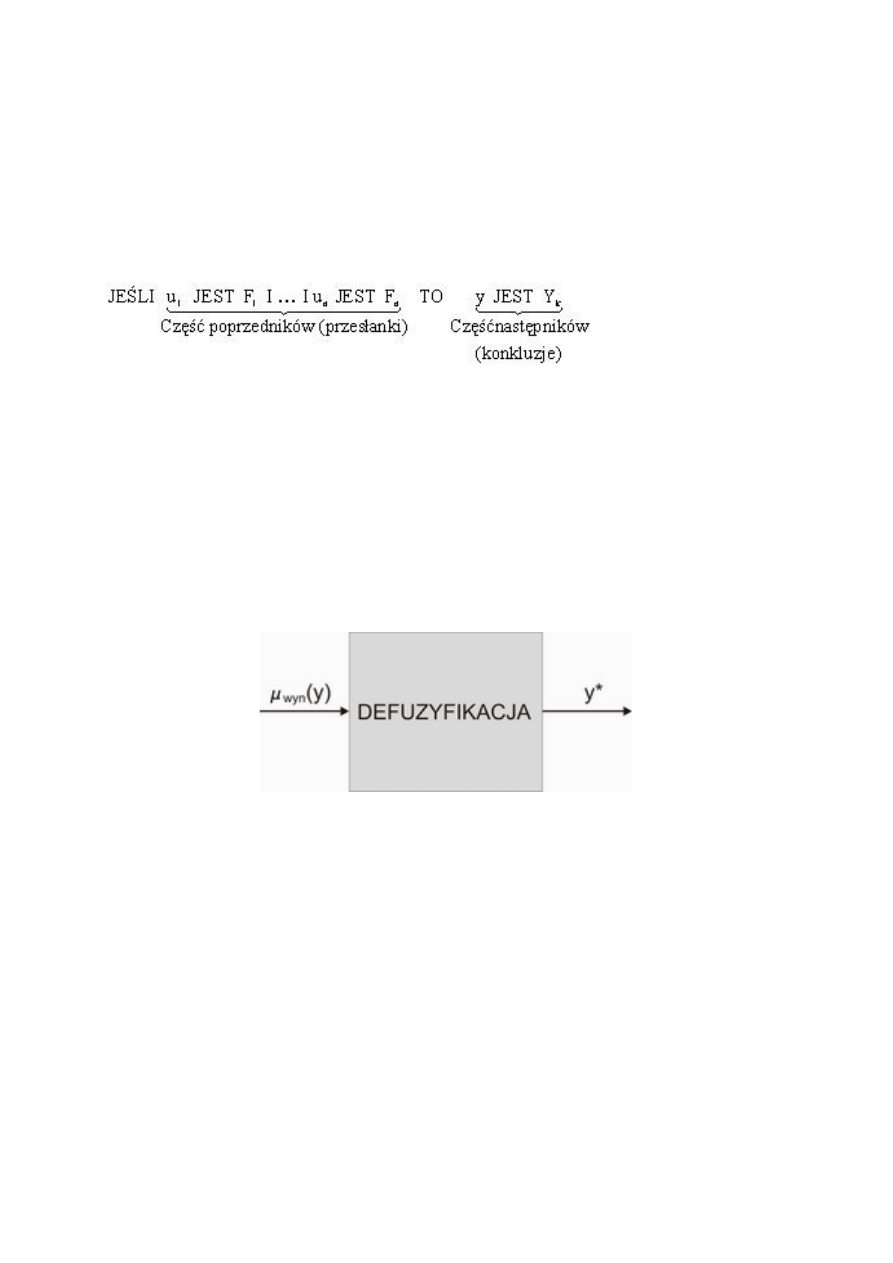
Baza reguł - reprezentuje wiedzę jakościową o systemie w postaci zbioru reguł
rozmytych w postaci wyrażeń jeśli-to. W przypadku układu MISO mają one postać:
25. wyniki dzialania regul , poziom zaplonu, jak się go wyznacza, pokazac na
przykaldzie
26. metoda defuzzyfikacji, na czym polega metoda cyfrowa i analogowa
Jest to ostatni blok układu sterowania rozmytego[2]. Na jego wejście trafia wynikowa funkcja
przynależności. Jest to wynik działania regulatora przedstawiony w postaci rozmytej. Żeby móc go wyprowadzić
na obiekt sterowany, zamieniany jest na konkretną wartość liczbową. Działanie to, stanowiące istotę tego bloku,
nazywamy ostrzeniem (inaczej defuzyfikacją).
Ogólnie działanie bloku defuzyfikacja można przedstawić następująco:
Wyróżniamy kilka metod defuzyfikacji. Do najpopularniejszych należą:
1) metoda pierwszego maksimum
2) metoda ostatniego maksimum
3) metoda środka maksimum
4) metoda środka ciężkości
5) metoda wysokości
27. tabela regul , jak się ja zapisuje i jak ja rozumiec
28. podstawowe pojecia w algorytmie genetycznym (populacja ,
chromosomy ,funkcja przystosowania)
populacja-zbiór osobników o określonej liczebności (ustalona licba osobnikow) każdy
osobnik jest kodowany liczbami. Cechy za zakodowane w postaci liczb lub fragmentow bitow
chromosomy- cechy osobnikow zapisane za pomoca frag. Bitow. Najczescniej osobniki maja
tylko jeden chromosom
funkcja przystosowania – ustalamy f. podczas projektowania w jakim stopniu dany osobnik
jest przystosowany do zadania w środowisku. F ocenia osobnikow
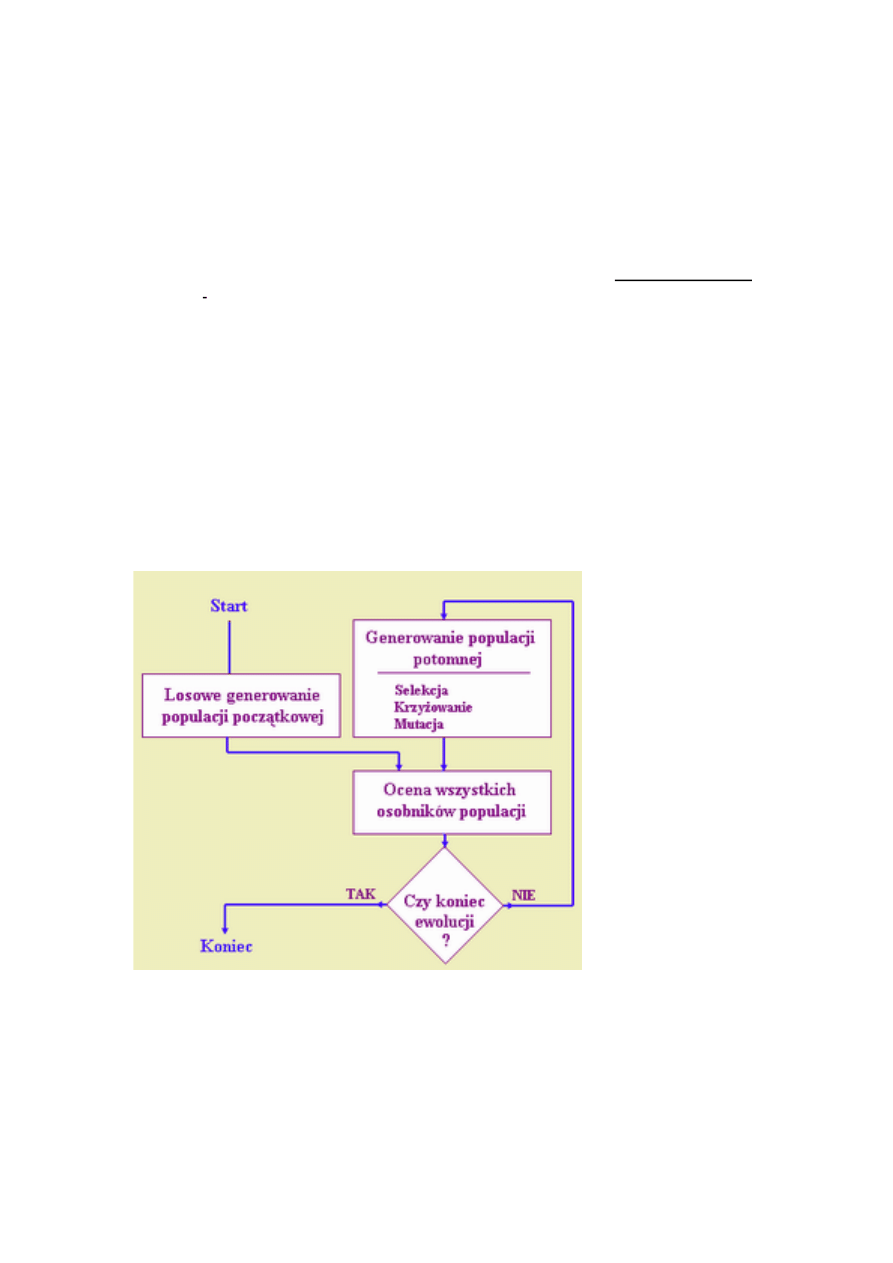
29. opisac dzialanie algorytmu genetycznego
Dzialanie algorytmu zaczyna się od stworzenia osobnikow (ilość bitow na osobnika), w programie bity
SA przydzielane losowo(bit tworzy liczbe), populacja powinna być liczba parzysta, pojedynczy bit to gen.
Wykorzystuje f. przystosowania dla każdego osobnika podawana zostaje wartość f.przystosowania. na podstawie
wartości dokonuj się losowanie nastepnej populacji (metoda kola ruletki).
Algorytm genetyczny operuje na chromosomach. Rolę tę pełni wektor o stałej długości, najczęściej składający
się z wartości binarnych. Każdy z bitów wektora pełni rolę genu. Zbiór chromosomów o określonej liczności
tworzy populację. Algorytm genetyczny potrzebuje zdefiniowania następujących operacji:
- generacji populacji początkowej,
- określenia jakości poszczególnych osobników,
- reprodukcji,
- mutacji,
- krzyżowania.
30. algorytm genetyczny do poszukiwania parametru optymalnego sterowania –
schemat wraz z komentarzem
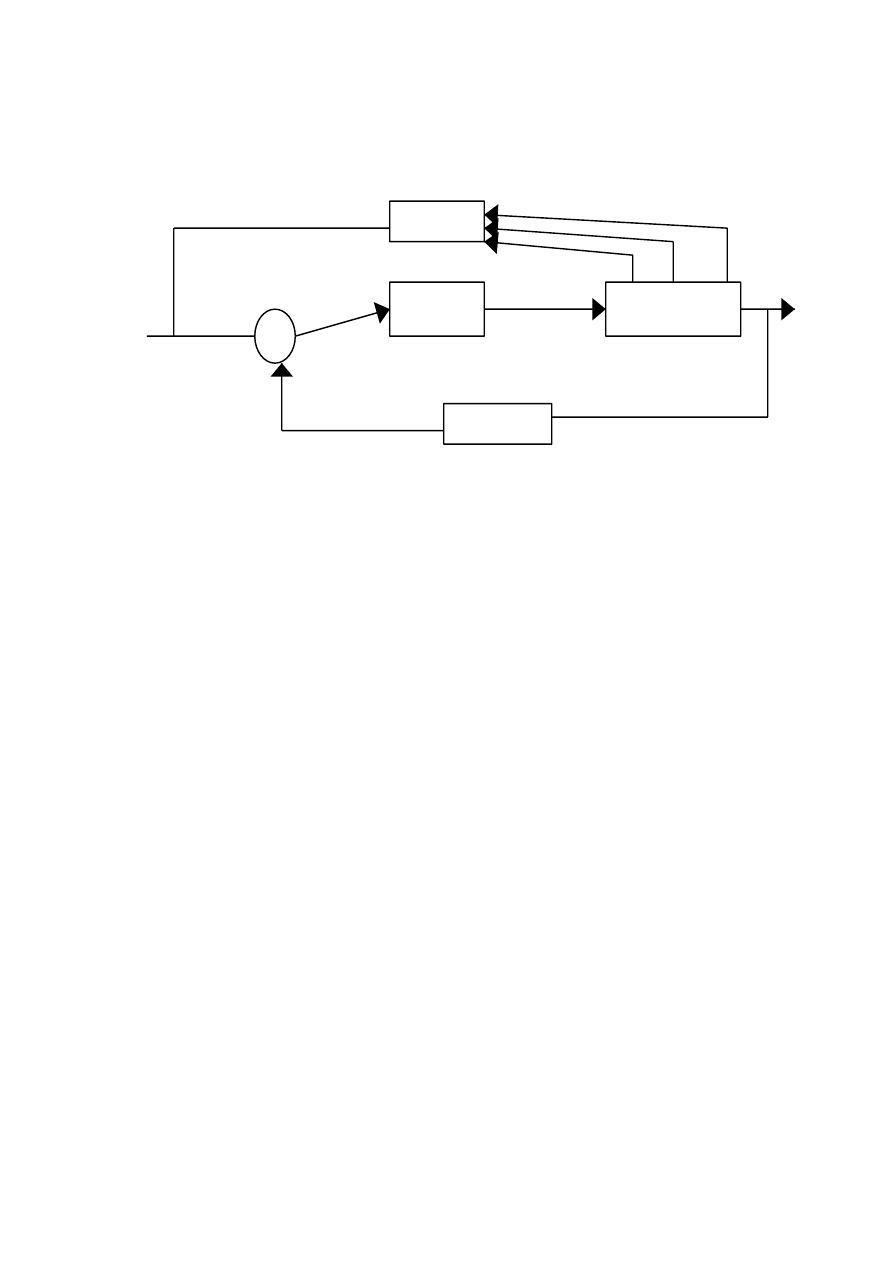
sterownik
Obiekt
sterowania
Czujnik
+
Wyszukiwarka
Podobne podstrony:
MSI oprac, Mechatronika, Metody Sztucznej Inteligencji, msi materiały
dobre doc
dobre cv doc
Opadły mgły, wstaje nowy dzień Stare Dobre Małżeństwo doc
dobre wykresy dla Ohma doc
dobre fund doc
dobre cw1 DOC
Drewno i kamień dobre sąsiedztwo doc
28c Jan Andrzej Morsztyn, Wybór poezji, wyd (BN I 257) Lutnia s 110 135, oprac Paulina Surmacz do
europejski system energetyczny doc
więcej podobnych podstron