Materiały zebrane i przekształcone przez Matysa
1
1.
Oblicz stopień ruchliwości manipulatora płaskiego, gdzie końcówka zbudowana jest
z 2 obrotowych par kinematycznych klasy 5
– N=2, -1 bo przytwierdzony bo dwa manipulatory klasy 5
2.
Podaj przykład złożonego zamkniętego łańcucha kinematycznego zbudowanego z par
kinematycznych klasy 5.
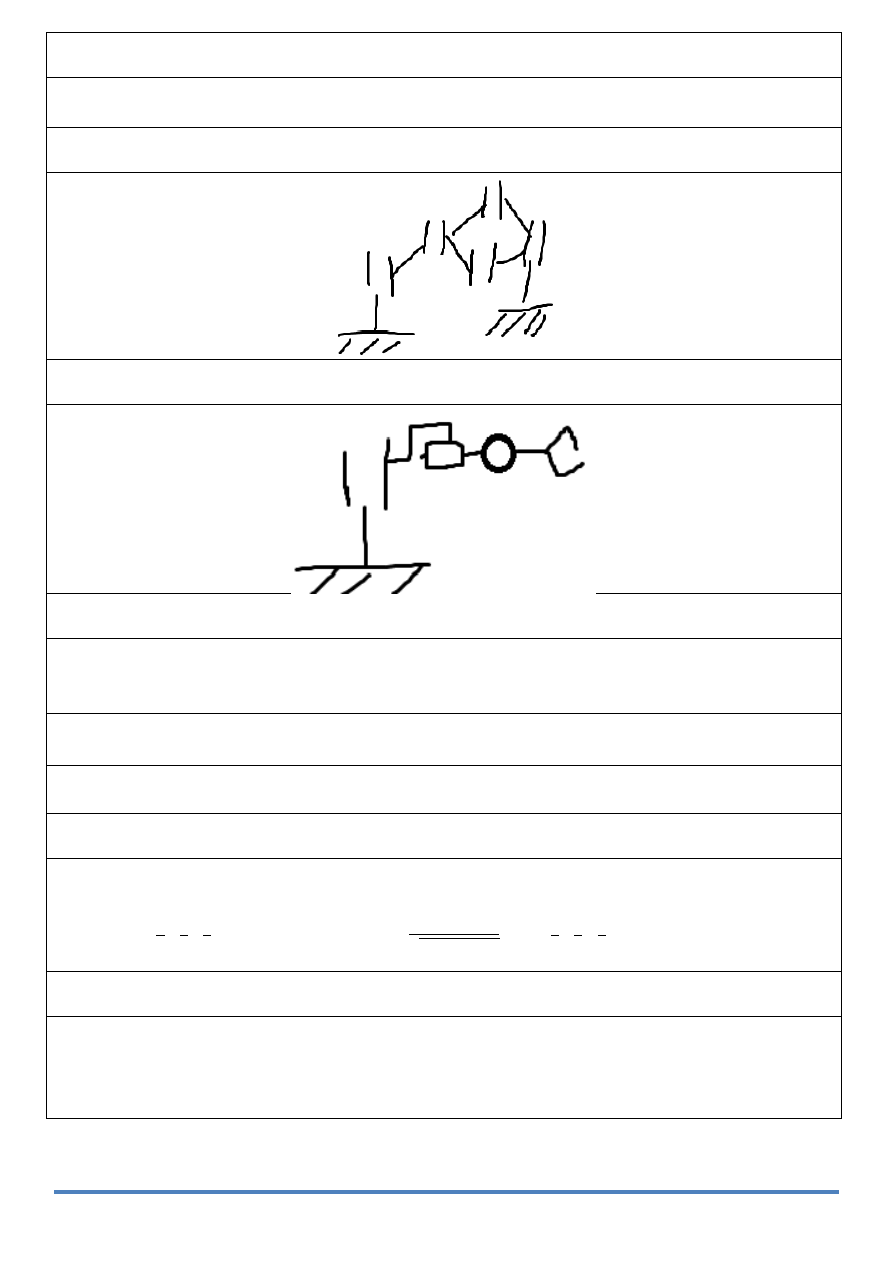
3.
Stosując standardowe oznaczenia par kinematycznych naszkicuj schemat ramienia
sferycznego
4.
Zapisz operator Euler dla kombinacji kątów Eulera , gdzie nowe osie zyx. Kolejność
obrotów Kolejność obrotów: .
-dla nowych współrzędnych
rot(z, )rot(y', )rot(x'', ) [
] [
] [
]
5.
Jak wyznaczyć współrzędne punktu r, i-tego ogniwa manipulatora względem układu j-
tego
mając dane
‘r
oraz niezbędne układy?
.
6.
Podaj operator przekształcenia jednorodnego będącego złożeniem obrotu wokół
osi y o kąt -90° i przesunięcia o wersor wektora [4 8 8 4]
T
[
[ ] [ ]
[ ]
] względem osi y
[
]
[ ]
√
[
]
[
]
7.
Jakie dane obejmuje pojedyncze położenie trajektorii ruchu końcówki robota? Podaj
przykład takiego zestawu
Materiały zebrane i przekształcone przez Matysa
2
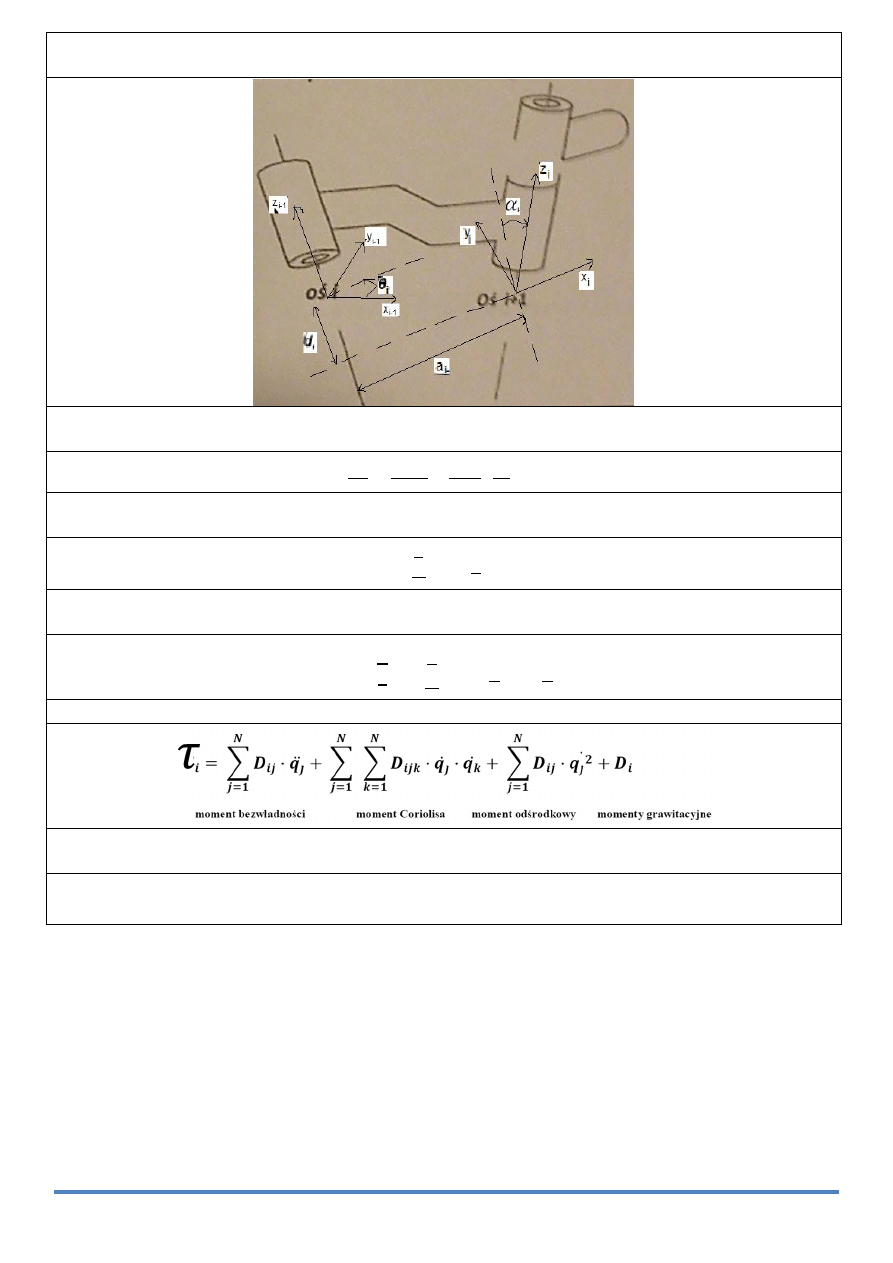
8.
Dorysuj układy współrzędnych i pokaż parametry Denevita-Hartenberga z indeksem
(i-1)
9.
Jak znaleźć prędkość kątową i-tego ogniwa manipulatora, znając prędkość kątową
ogniwa poprzedniego oraz niezbędne prędkości węzłowe?
̇
10. Jak zależy wektor wszystkich prędkości końcówki technologicznej manipulatora od
prędkości węzłowych?
*
+ ̇
11. Jak zależy wektor wszystkich przyśpieszeń końcówki technologicznej manipulatora od
wielkości węzłowych?
*
+ [
̇
̇]
̇ ̇ ̈
12. Zapisz równanie bilansu momentów dla i-tego węzła manipulatora.
13. Jak siły i momenty w układzie końcówki manipulatora zależą od momentów (i sił)
węzłowych?
((
)
)
[
]
[
]
[
]
Materiały zebrane i przekształcone przez Matysa
3
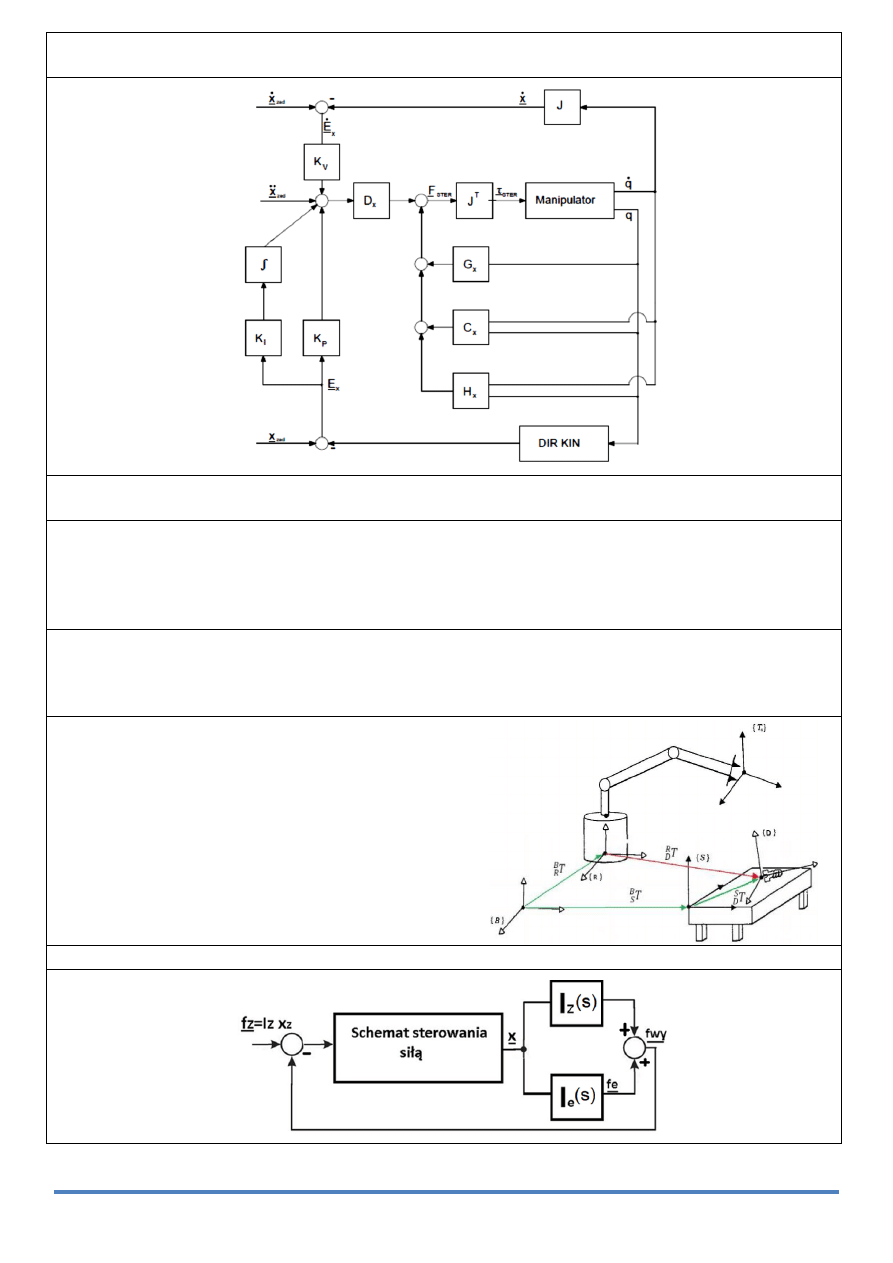
14. Naszkicuj ogólny schemat układu sterowania manipulatora z obliczanym momentem
i linearyzującym sprzężeniem zwrotnym we współrzędnych kartezjańskich.
15. Naszkicuj schemat blokowy układu sterowania pojedynczego węzła manipulatora bez
kompresji uchybów ustalonych, oznacz i opisz wszystkie sygnały.
16. Na stanowisku montażowym znane jest położenie stołu(s), detalu względem stołu (
S
D)
oraz robota(R). Układ chwytaka robota T
6
nie jest dany. Jaką procedurę wykorzystasz,
aby znaleźć sterowania dla węzłów robota, które pozwolą pobrać detal ze stołu i co
wprowadziłeś na wejście tej procedury?
Kinematyka odwrotna
17. Schemat sterowania impedancyjnego oparty o układ sterowania siłą
Materiały zebrane i przekształcone przez Matysa
4
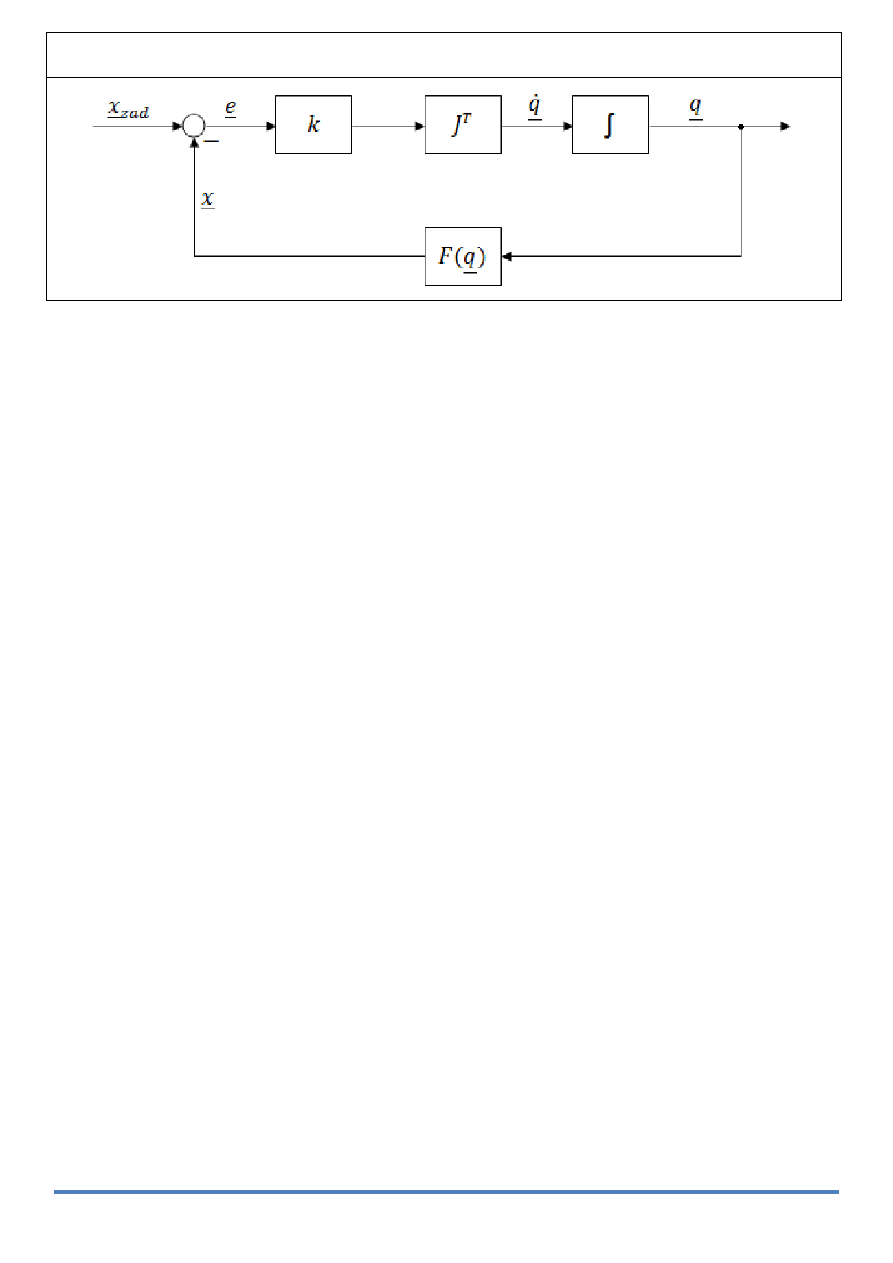
18. Podaj schemat algorytmu numerycznej metody RMRC rozwiązania zadania odwrotnego
kinematyki manipulatora z kontrolą błędu z transponowaniem
Wyszukiwarka
Podobne podstrony:
Ortopedia Egzamin 2012 BOX
pedagogika ogólna egzamin 2012(1)
Fizjologia pytania do egzaminu 2012 2013 poprawione
Dermatologia Lekarski Egzamin 2012
Egzamin 2012
Egzamin 0 2012 id 151704
Egzamin 2012 poziom podstawowy
Egzamin 2012 poziom rozszerzony Nieznany (2)
Biochemia egzamin 2012 id 86181
Pediatria Egzamin 2012, Medycyna, Pobr materiały, materiały z poprzednich lat, materiały z poprzedni
mikrobiologia-ogolna-egzamin-2012-pierwszy-termin
biologia, egzamin 2012 (1)
Egzamin 2012!
Egzamin 2012
Egzamin 1, 2012-13
więcej podobnych podstron