
Politechnika Rzeszowska
im. Ignacego Łukasiewicza
Katedra Informatyki
i Automatyki
Projekt z przedmiotu:
Sztuczna Inteligencja
Temat:
Zrealizować sieć neuronową uczoną algorytmem wstecznej
propagacji błędu ( learnbp ) uczącą się rozpoznawania
zwierząt.
Autor:
Sebastian Twardzik
Rok:
II EF-DI
Grupa:
P15
Data:
24.05.2011r.

2
Spis treści:
1. Opis problemu...........................................................................................................................3
2. Dane do projektu.......................................................................................................................3
2.1 Opis danych.................................................................................................................3
2.2 Normalizacja danych...................................................................................................3
2.3 Wczytanie danych.......................................................................................................4
3. Opis algorytmu..........................................................................................................................4
3.1 Czym jest sieć neuronowa?.........................................................................................4
3.2 Koncepcja budowy sieci neuronowej..........................................................................4
3.3 Opis algorytmu............................................................................................................5
3.4 Skrypt realizujący sieć neuronową..............................................................................6
4. Eksperymenty............................................................................................................................8
5. Podsumowanie i wnioski........................................................................................................13
6. Bibliografia.............................................................................................................................13
Zawartość płyty CD:
- kod
- wykresy
- wyniki oraz skrypt rysujący wykresy
- projekt
- info.txt
3
1. Opis problemu.
Celem projektu jest stworzenie sieci neuronowej, która będzie przyporządkowywać zwierzę do jednej z
następujących grup:
- (1) ssaki
- (2) ptaki
- (3) gady
- (4) ryby
- (5) płazy
- (6) owady
- (7) bezkręgowce.
Przeanalizowanych zostało 101 gatunków zwierząt na podstawie siedemnastu ich cech. Ostatnią wartością w
tabeli jest numer klasy do jakiej należy dany gatunek.
Dane do projektu zostały pobrane z repozytorium Uniwersytetu Kalifornijskiego w Irvine
(http://archive.ics.uci.edu/ml/datasets/zoo) stworzonego przez Richarda Forsytha.
2. Dane do projektu.
2.1 Opis danych.
Tablica z danymi składa się z 18 wierszy z cechami zwierząt:
1. Nazwa zwierzęcia
2. włosy: Boolean
3. pióra: Boolean
4. jaja: Boolean
5. mleko: Boolean
6. powietrzne: Boolean
7. wodne: Boolean
8. drapieżnik: Boolean
9. zębate: Boolean
10. kręgowiec: Boolean
11. oddycha: Boolean
12. jadowite: Boolean
13. płetwy: Boolean
14. nogi: liczbowe (wartości: {0,2,4,5,6,8})
15. ogon: Boolean
16. domowe: Boolean
17.rozmiaru kota (catsize): Boolean
18. typ: liczbowe (liczby całkowite w przedziale [1,7])
Oraz 101 kolumn z gatunkami zwierząt. Tabela poniżej opisuje układ kolumn.
Numer
kolumny
Typ zwierzęcia
1 - 41
ssaki
42 - 61
ptaki
62- 66
gady
67 - 79
ryby
80 - 83
płazy
84 - 91
owady
92 - 101
bezkręgowce
2.2 Normalizacja danych.
Do dalszej części projektu dane należy odpowiednio przekształcić. W tym celu usuwamy pierwszy wiersz tablicy(
ten zawierający nazwy zwierząt). Ostatni wiersz również należy usunąć i stworzyć z niego osobny wektor. Cechy
które nie są opisane wartościami Boolowskimi należy znormalizować, tzn. wielkości te mają się mieścić w
przedziale od 0 do 1. Po takich przekształceniach otrzymujemy dwie tablice:
P<16 x 101> zawierającą cechy zwierząt oraz
T<1 x 101> zawierającą gatunki zwierząt.
Całość zapisujemy pod nazwą Zoo2.mat.
4
2.3 Wczytanie danych.
Przed wczytaniem danych należy wyczyścić przestrzeń roboczą oraz ustawić pewne parametry środowiska.
Aby to zrobić należy zacząć program w ten sposób:
clear
all
% czyszczenie wszystkich zmiennych
nntwarn
off
% wył
ą
czenie ostrze
ż
e
ń
NNT
format
long
% 15 cyfr double i 7 single
format
compact
% format danych wyj
ś
ciowych brak enter przed ans=
load
zoo2
;
% załadowanie danych do przestrzeni roboczej
3. Opis algorytmu
3.1 Czym jest sieć neuronowa?
Sieć neuronowa jest to model matematyczny realizujący obliczenia lub przetwarzanie sygnałów. Składa się ona z
sieci węzłów obliczeniowych zwanych neuronami oraz z ich połączeń.. Została ona zaprojektowana na wzór
ludzkiego mózgu. Jednak w przypadku mózgu każdy neuron jest połączony z około 10 000 innych. Natomiast w
przypadku sztucznej sieci łączy się on jedynie z sąsiadem. Wszystkie one działają kolejno a nie tak jak w mózgu:
jednocześnie.
Podstawowe właściwości sieci neuronowych mające swoje odzwierciedlenie w biologicznym układzie
nerwowym, to:
•
zdolność do uogólniania danych.
•
interpolacja i przewidywanie.
•
mała wrażliwość na szumy w zbiorze danych.
•
zdolność do efektywnej pracy nawet po usunięciu kilku neuronów lub połączeń między nimi.
•
przetwarzanie równoległe i rozproszone.
Najpopularniejsze obecnie zastosowanie sieci neuronowych:
•
w programach do rozpoznawania pisma (OCR)
•
na lotniskach do sprawdzania, czy prześwietlony bagaż zawiera niebezpieczne ładunki
•
do syntezy mowy.
3.2 Koncepcja budowy sieci neuronowej.
5
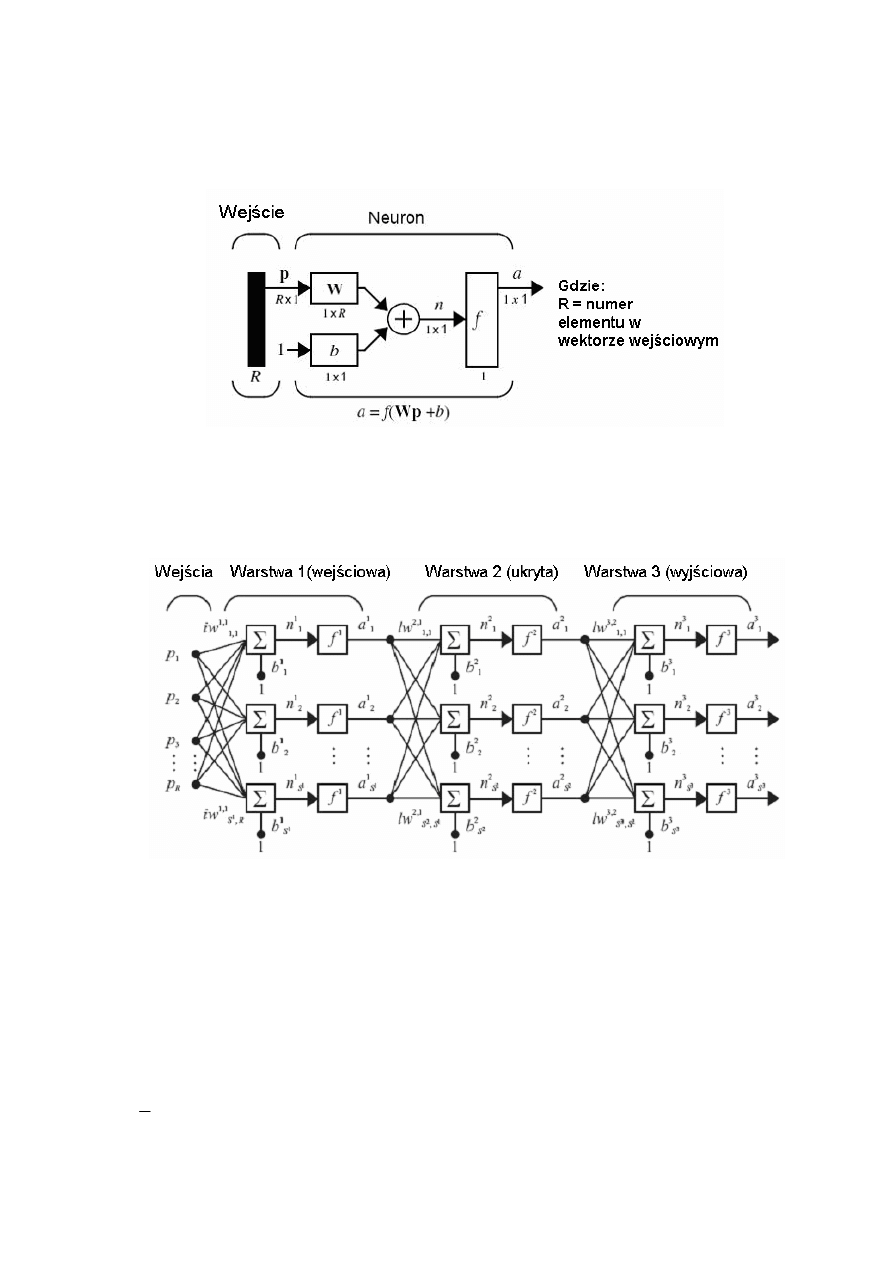
Matematyczny model neuronu oraz sieci 3 warstwowej:
gdzie: a jest wyjściem sieci
W jest prostokątną macierzą wag
p są to sygnały wejściowe
b jest wektorem przesunięć
Budowa neuronu.
Budowa sieci neuronowej 3 warstwowej – model.
3.3 Opis algorytmu.
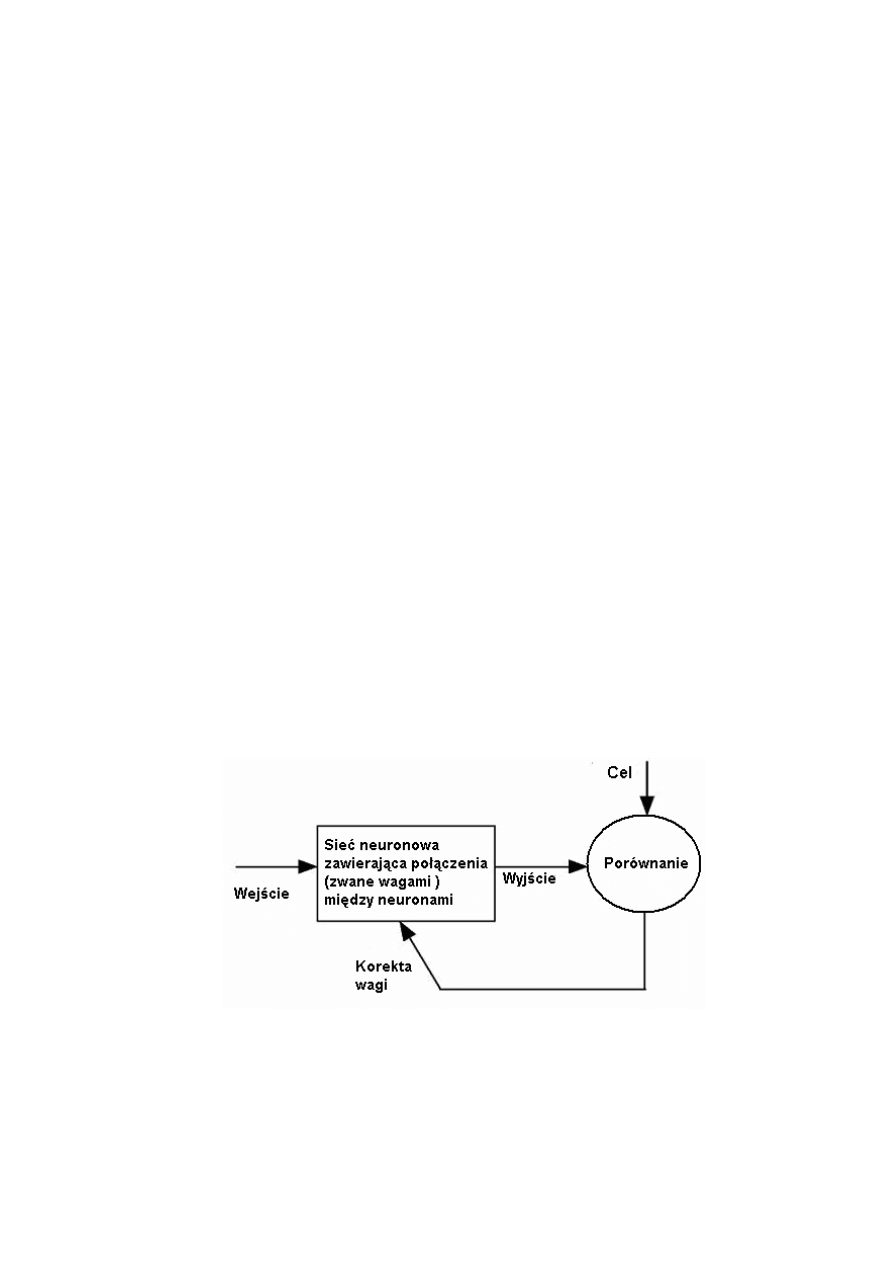
W projekcie zastosowany został algorytm uczenia pod nadzorem ze wsteczną propagacją błędu (learnbp).
Algorytm wstecznej propagacji błędu określa sposób doboru wag w sieci wielowarstwowej przy użyciu
gradientowych metod optymalizacji. Uczenie polega na odpowiednim doborze wag neuronów tak aby błąd
ś
redniokwadratowy sieci ( SSE) był mniejszy niż zadany.
Wartość błędu dla pojedynczego neuronu może być dodatnia lub ujemna a więc dla dwóch źle nauczonych
neuronów może wynieść zero. Aby temu zapobiec e
j
jest podniesione do kwadratu, a więc :
∑
=
=
K
j
j
e
E
1
2
2
1
6
Nazwa algorytmu pochodzi od metody obliczania błędów w poszczególnych warstwach sieci.
W pierwszym kroku na podstawie danych wejściowych i wyjściowych wykonywane są ich obliczenia w ostatniej
warstwie.
Kolejno obliczany jest błąd dla neuronów poprzedniej warstwy itd. W ten sposób sygnał błędu rozprzestrzenia się
od warstwy wyjściowej wstecz.
Korekcja błędu sieci jest oparta na minimalizacji funkcji miary błędu, będącej sumą kwadratów błędów na
wyjściach sieci. Wektor wag neuronu jest przesuwany w kierunku ujemnego gradientu. Dodatkowo wektor ten jest
przemnażany przez współczynnik
η
, który nazywany jest współczynnikiem szybkości uczenia. Zatem zmiana
wagi w każdej iteracji jest równa:
Wykorzystując oprogramowanie MatLab opisaną wyżej funkcje wywołujemy w następujący sposób:
[dW1,dB1] = learnbp(P,D1,lr);
Gdzie:
P- Macierz wektorów wejściowych
D1- Macierz wektorów błędów [S,Q]
lr - Współczynnik uczenia
dW1- macierz zmian wagi
dB1- wektor zmian biasów
3.4 Skrypt realizujący sieć neuronową.
Do skryptu zostały dodane pętle zmieniające różne parametry sieci. Efekty pracy zapisywane są w pliku
tekstowym "wyniczek.txt".
clear
all
% czyszczenie wszystkich zmiennych
nntwarn
off
% wył
ą
czenie ostrze
ż
e
ń
NNT
format
long
% 15 cyfr double i 7 single
format
compact
% format danych wyj
ś
ciowych brak enter przed ans=
load
zoo2
;
wiersz = 1;
[R,Q] = size(P);
%zwraca wymiar macierzy [R -kol, Q- wier]
for
eksperyment = 1 : 1 : 10,
lr = 1e-2;
for
licznik = 0: 1 : 2,
lr = lr / 10;
for
S1 = 1: 10 : 101,
for
S2 = 1: 10 : S1,
[S3,Q] = size(T);
%S1 - liczba neuronów warstwy 1
%S2 - liczba neuronów warstwy 2
[W1,B1] = nwtan(S1,R);
% generator losowy Nguyn- Widrow dla
% neuronów TANSIG
% otrzymujemy macierz W1 o wymiarach S1xR i wektor B1 o wymiarze S1
[W2,B2] = nwtan(S2,S1);
% W1, W2, W3- macierze wag
[W3,B3] = rands(S3,S2);
% generowanie macierzy wag i wektora biasu
% o warto
ś
ciach statystycznych o
% jednorodnym rozkładzie z zakresu [-1,1]
% B1, B2, B3- wektory bias
% otrzymujemy macierz W1 o wymiarach S3xS2 i wektor B3 o wymiarze S3
disp_freq=100;
%cz
ę
stotliwo
ść
wy
ś
wietlania
max_epoch=20000;
%maksymalna liczba kroków
err_goal=.25;
% bł
ą
d docelowy- warto
ść
kra
ń
cowa

7
error = [];
A1 = tansig(W1*P,B1);
% kalkuluje wyj
ś
cia warstwy na podstawie wej
ść
A2 = tansig(W2*A1,B2);
% parametry W1*P- wej
ś
cia warstwy* odpowiednie
% wagi
A3 = purelin(W3*A2,B3);
% zwraca macierz ( A3 E <-1,1>)
E = T -A3;
% A- wyj
ś
cie warstwy
SSE = sumsqr(E);
for
epoch=1:max_epoch,
if
SSE < err_goal,
% je
ż
eli suma kwadratów bł
ę
dów mniejsza od
% bł
ę
du minimalnego
epoch = epoch - 1;
break
,
end
,
D3 = deltalin(A3,E);
% funkcja delty dla neuronów purelin
% E- macierz bł
ę
dów
%( ró
ż
nica warto
ś
ci faktycznych i przewidzianych przez sie
ć
% neuronow
ą
w poprzednim kroku)
% zwraca pochodn
ą
bł
ę
dów dla ukrytej warstwy
D2 = deltatan(A2,D3,W3);
% % funkcja delty dla neuronów tansig
% W - macierz wag pomi
ę
dzy warstwami[S1, S2]
D1 = deltatan(A1,D2,W2);
[dW1,dB1] = learnbp(P,D1,lr);
% P- Macierz wektorów wej
ś
ciowych
% D1- Macierz wektorów bł
ę
dów [S,Q]
% lr- Współczynnik uczenia
% dW1- macierz zmian wagi
% dB1- wektor zmian biasu
% zwraca dW1 i dB1
[dW2,dB2] = learnbp(A1,D2,lr);
[dW3,dB3] = learnbp(A2,D3,lr);
W1 = W1 + dW1;
B1 = B1 + dB1;
W2 = W2 + dW2;
B2 = B2 + dB2;
W3 = W3 + dW3;
B3 = B3 + dB3;
A1 = tansig(W1*P,B1);
% kalkuluje wyj
ś
cia warstwy na podstawie
% wej
ść
A2 = tansig(W2*A1,B2);
% parametry W1*P- wej
ś
cia warstwy*
%odpowiednie wagi
A3 = purelin(W3*A2,B3);
% zwraca macierz ( A3 E <-1,1>)
E = T - A3;
% A- wyj
ś
cie warstwy
SSE = sumsqr(E);
% sumuje spot
ę
gowane elementy macierzy
error = [error SSE];
% składa 2 macierze w jedn
ą
if
(rem(epoch,disp_freq) == 0)
% rem- reszta z dzielenia. co ile
% epok ma wy
ś
wietla
ć
numer epoki
epoch
SSE
eksperyment
S1
S2
lr
pause(1e-100)
end
end
% tu zapis wyników do tablicy
wynik( wiersz , 1) = eksperyment;
wynik( wiersz , 2) = S1;
wynik( wiersz , 3) = S2;
8
wynik( wiersz , 4) = lr;
wynik( wiersz , 5) = 100*(1-sum((abs(T-A3)>.5)')/length(T));
wynik( wiersz , 6) = SSE;
wynik( wiersz , 7) = epoch;
wiersz = wiersz + 1;
epoch
SSE
[T' A3' (T-A3)' (abs(T-A3)>.5)']
100*(1-sum((abs(T-A3)>.5)')/length(T))
end
end
end
end
save
wyniczek4.txt
wynik
-ascii
;
4. Eksperymenty
Eksperymenty wykonane w ramach projektu opierały się na zmianie ilości neuronów w pierwszej oraz drugiej
warstwie, oraz zmianie współczynnika uczenia( lr). Zostało wykonanych 10 takich eksperymentów.
Dane uczące zostały zapisane w tablicy <16 x 101>.
Dla każdego eksperymentu zostało wykonane 9 wykresów trójwymiarowych.
Najlepszą miarą tego ja szybko sieć się uczy jest liczba epok po której błąd minimalny został osiągnięty.
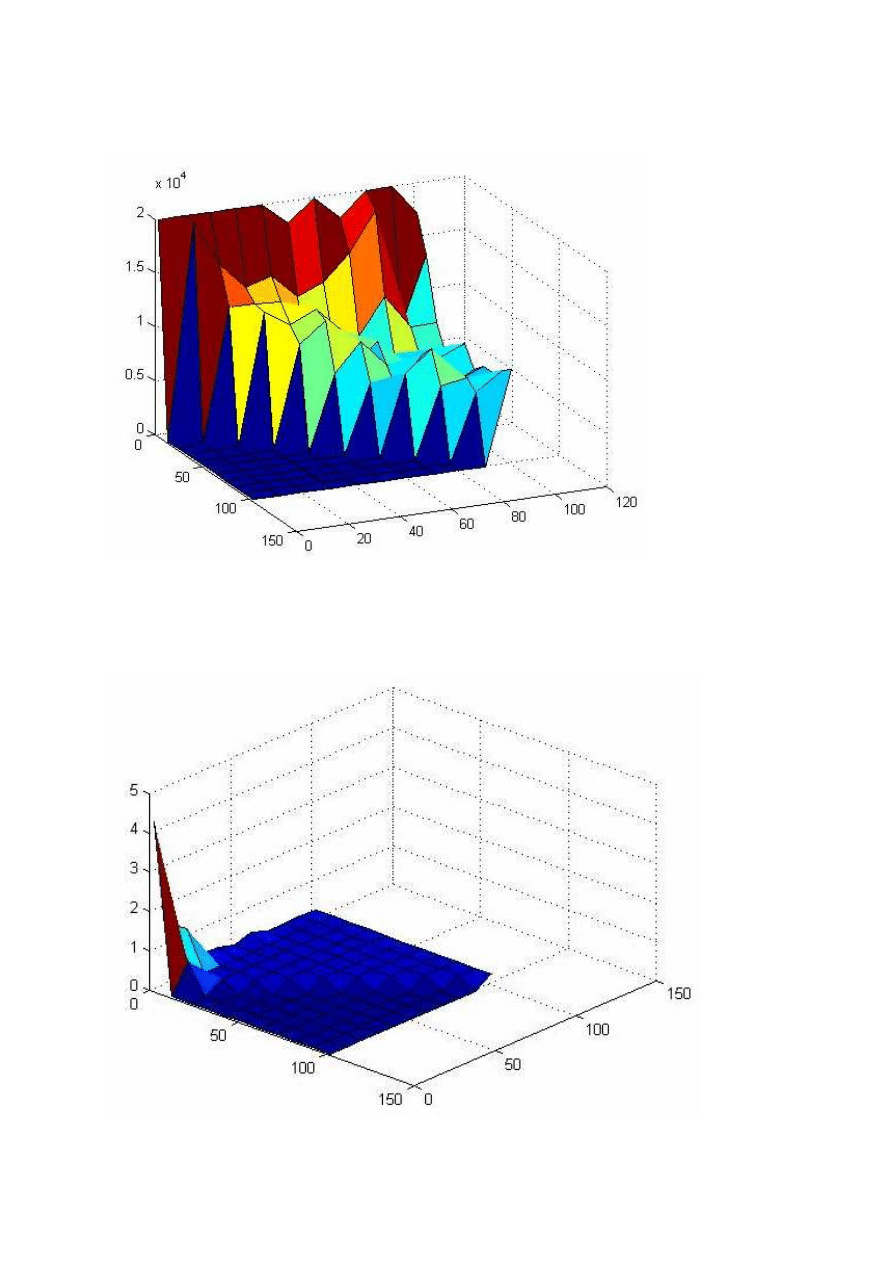
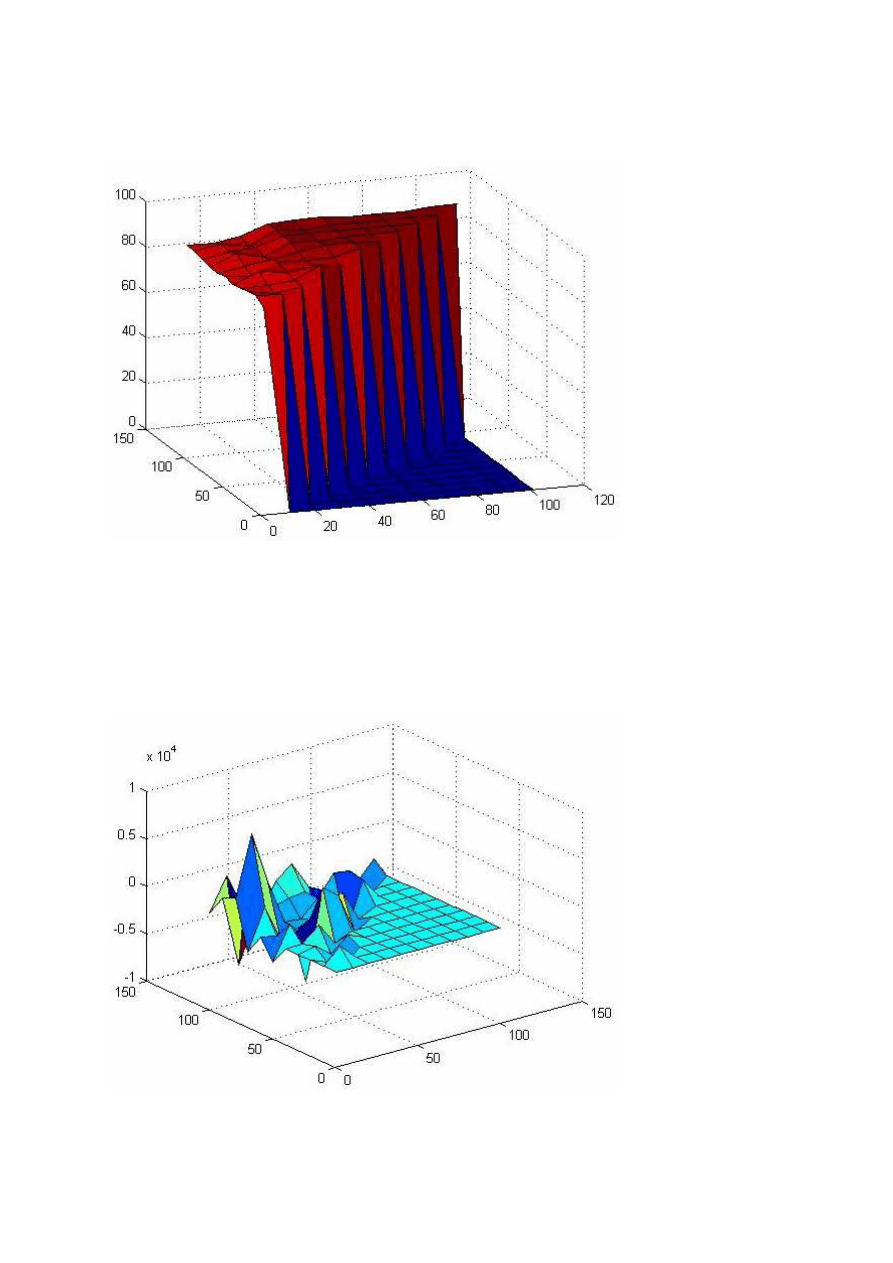
Dla współczynnika uczenia lr = 0.001 wykres wygląda tak:
Jak widać sieć uczy się tylko dla małej liczby (mniej niż 30) neuronów w drugiej warstwie.
9
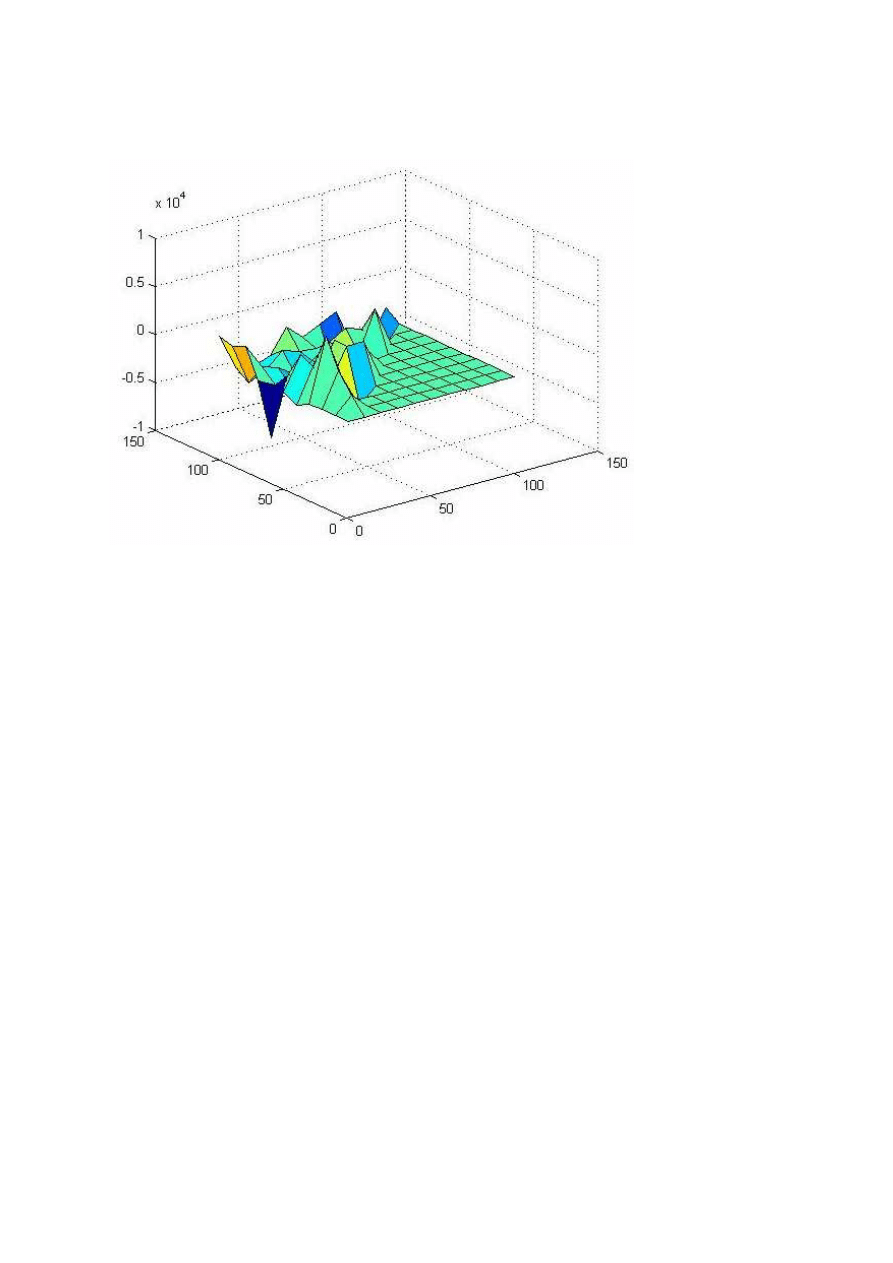
Błąd SSE dla współczynnika lr = 0.001 obrazuje wykres:
Tam gdzie funkcja nie przyjmuje żadnych wartości błąd jest bardzo duży( wartość Nan).
A oto wykres pokazujący w ilu procentach sieć się nauczyła. Wartość ta wynosi 100% również tam gdzie błąd
SSE ma wartość Nan a więc wykres nie zupełnie pokazuje prawdę.
10
Następnie zmieniony został współczynnik uczenia na lr = 0.0001. Dla tej wartości wykresy wyglądają
następująco:
f(S1, S2) = epoch
Jak widać sieć jest w stanie nauczyć się niezależnie od ilości neuronów w warstwach. Ich ilość wpływa na tempo
uczenia. Im więcej neuronów tym szybciej sieć się uczy.
A oto pozostałe wykresy:
f(S1, S2) = SSE
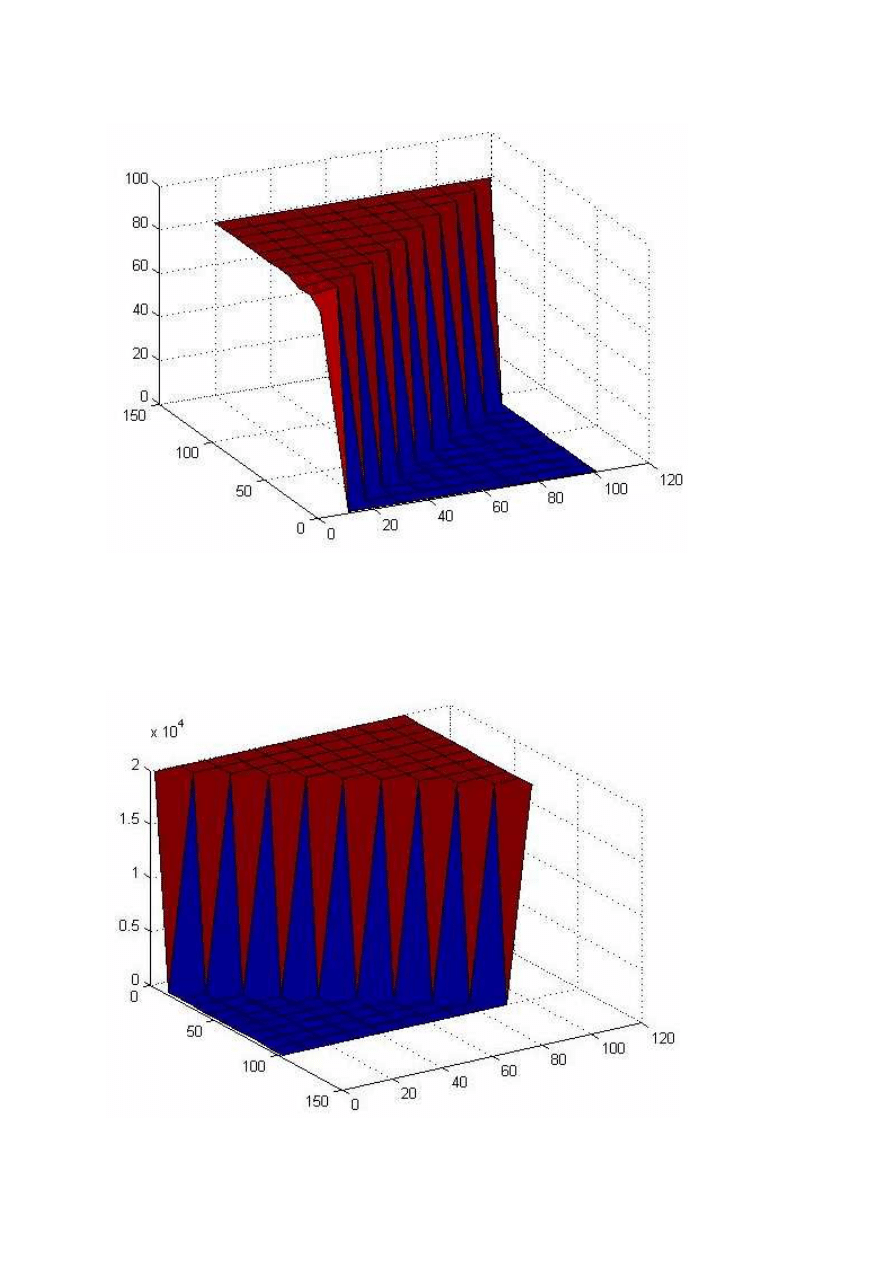
11
f(S1, S2) = %
W tym przypadku współczynnik uczenia jest dobrze dobrany.
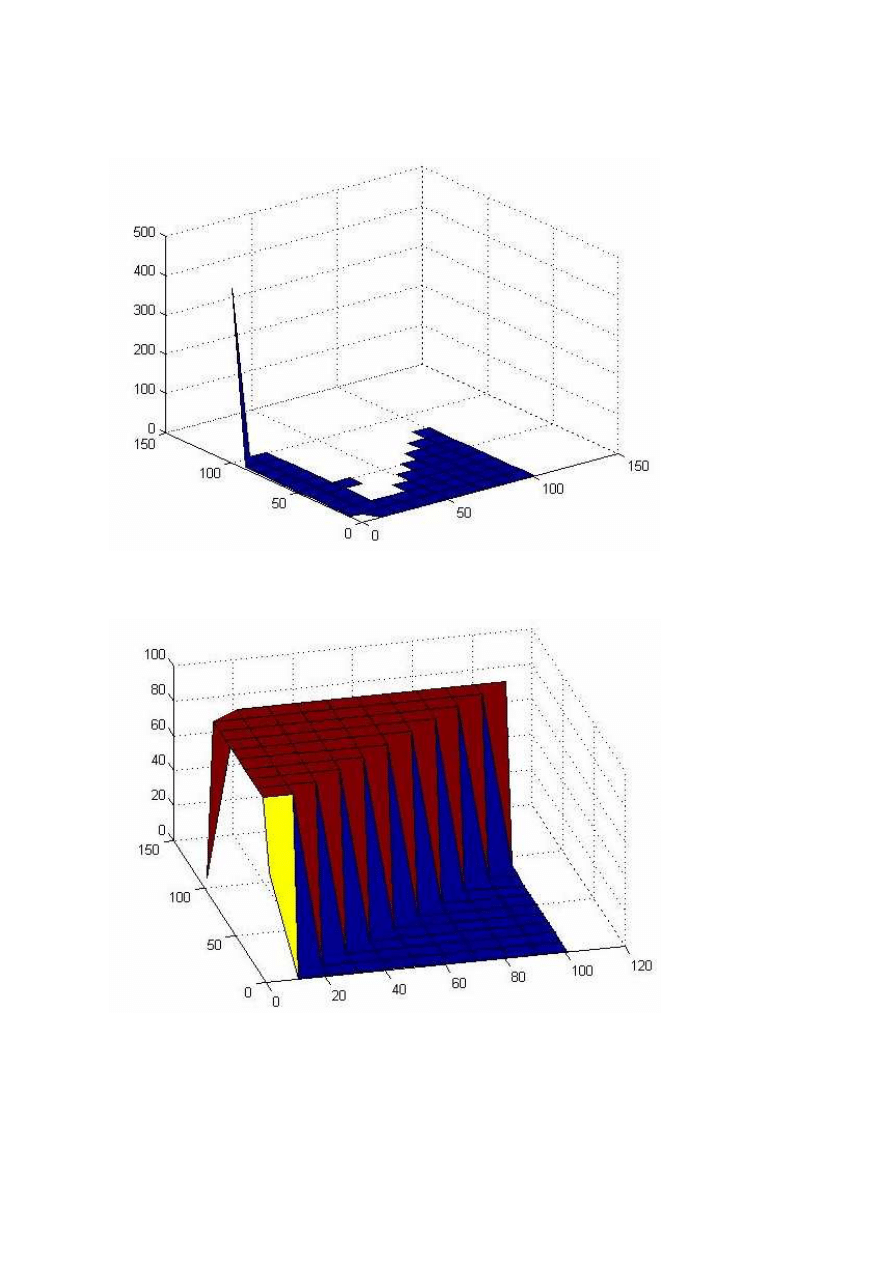
Ostatnia wartość współczynnika lr wynosiła 0.00001. Dla tej wartości wykresy wyglądają następująco:
f(S1, S2) = epoch
12
Sieć nie jest w stanie się nauczyć liczbie epok równej 20 000. A w ilu procentach była w stanie się nauczyć
pokazuje poniższy wykres:
f(S1, S2) = %
Wyniki są zbliżone do 100%. Wykres zależności SSE od ilości neuronów w warstwach jest tu zbędny.
Prawdopodobnie przy większej liczbie epok sieć by się nauczyła.
Wykonane wykresy pokazują że współczynnik uczenia lr = 0.0001 jest optymalną wielkością dla tych danych
wejściowych.
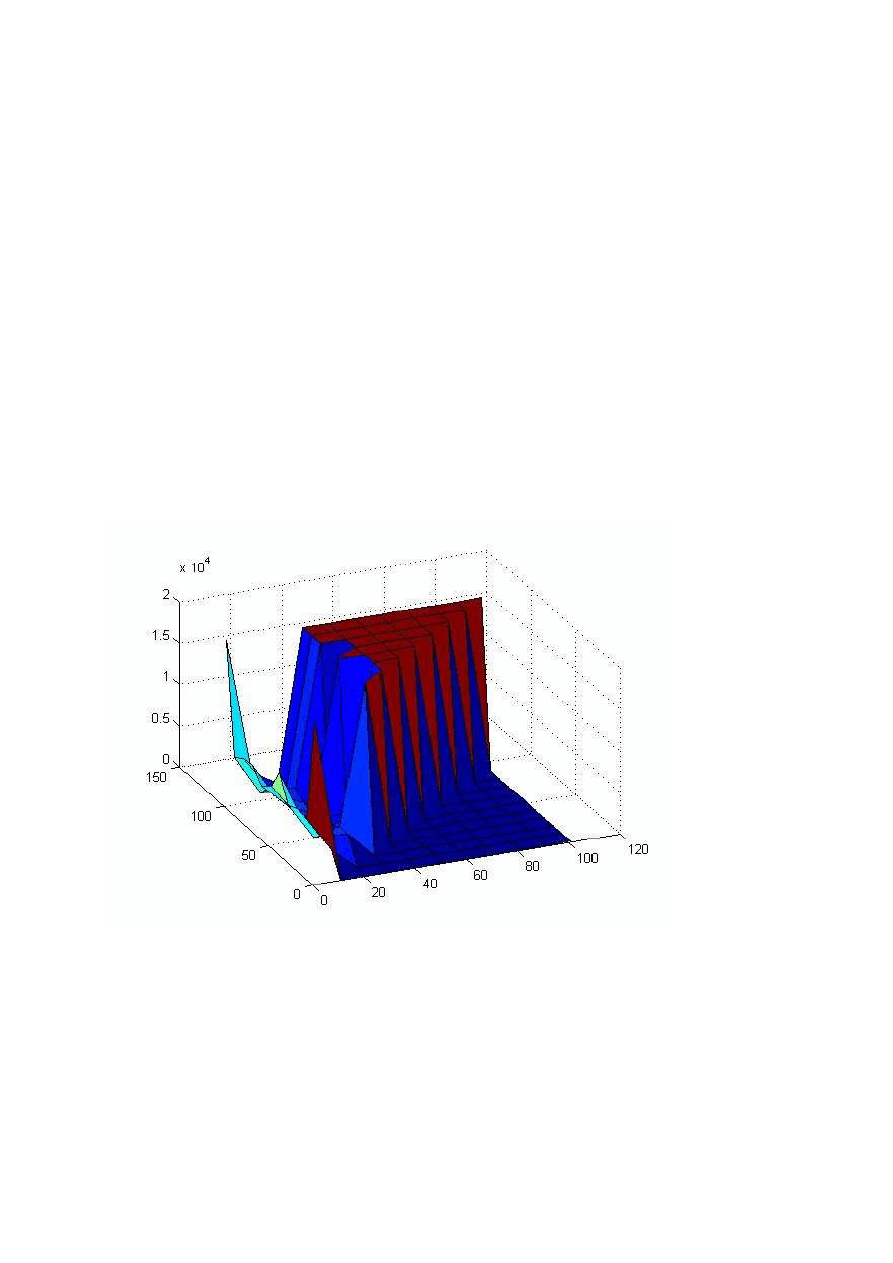
Dla kolejnych eksperymentów wyniki nie były identyczne. Najlepiej będzie to odzwierciedlał wykres
f(S1, S2) = epoch przy współczynniku uczenia lr = 0.0001.
Poniższe wykresy pokazują różnicę pomiędzy eksperymentem:
•
pierwszym i trzecim
13
•
czwartym i siódmym
5. Podsumowanie i wnioski.
Celem projektu było zbadanie działania wielowarstwowej, sztucznej sieci neuronowej. Do tego celu została
wykorzystana funkcja learnbp z pakietu MatLab która realizuje algorytm uczenia ze wsteczną propagacją błędu.
Zadaniem sieci było przyporządkowywanie zwierząt do jednej z grup na podstawie ich cech. Dane uczące zostały
pobrane z repozytorium uniwersytetu Kalifornijskiego w Irvine.
Do realizacji projektu dane musiały zostać odpowiednio znormalizowane. Podczas badań zmieniane były
następujące parametry sieci: Liczba neuronów w pierwszej warstwie, liczba neuronów w drugiej warstwie ( nigdy
nie przekraczała liczby neuronów w pierwszej ) oraz współczynnik uczenia. Wykonanych zostało 10
eksperymentów. Pokazały one że dla tych samych parametrów szybkość uczenia może się nieznacznie różnić a
więc wyniki nie są powtarzalne.
Dla współczynnika uczenia lr = 0.001 sieć uczyła się najszybciej ( najmniejsza potrzebna liczba epok to około
1180 ) przy odpowiednio dobranej liczbie neuronów, ale nie uczyła się wcale gdy ich liczba była źle dobrana.
Natomiast dla współczynnika lr = 0.0001 uczyła się zawsze. A więc jeśli jest on mniejszy mamy gwarancję że
sieć będzie się uczyć ale proces ten będzie potrzebował więcej epok aby osiągnąć minimalny błąd.
Współcześnie sztuczne sieci neuronowe znajdują coraz więcej zastosowań. Problem rozpoznawania zwierząt to
tylko mała część ich możliwości. Wykorzystywane są również do rozpoznawania obrazów, mowy, diagnostyki
medycznej czy teorii sterowania. Swoją rosnącą popularność sieci neuronowe zawdzięczają min. zdolności do
uczenia się i uogólniania nabytej wiedzy oraz równoległemu przetwarzaniu informacji.
6. Bibliografia
1.
http://ssn.elektrotechnika.ip.pwsz.edu.pl/nnt/nnt1.php
2.
http://pbryzi.fm.interia.pl/W/SN.htm
3.
http://www.neuron.kylos.pl/pliki/jednokier/jednokier4.html
4.
http://galaxy.agh.edu.pl/~vlsi/AI/backp_t/backprop.html
Wyszukiwarka
Podobne podstrony:
712[06] S1 01 Rozpoznawanie mat Nieznany
04 Rozpoznawanie i dobieranie t Nieznany (2)
03 Rozpoznawanie i dobieranie t Nieznany (2)
organizowanie produkcji zwierze Nieznany
kryteria klasyfikacji zwierzat Nieznany
trainbpx rozpoznawanie zwierzat
02 Rozpoznawanie podstawowych m Nieznany
08 Prowadzenie produkcji zwierz Nieznany (2)
05 Rozpoznawanie instrumentow m Nieznany
2 2 ocena zageszczenia zwierzat Nieznany (2)
06 Rozpoznawanie, dobieranie, o Nieznany (2)
learnbp rozpoznawianie samochodow po sylwetce
712[06] S1 01 Rozpoznawanie mat Nieznany
produkcja zwierzeca poradnik201 Nieznany
więcej podobnych podstron