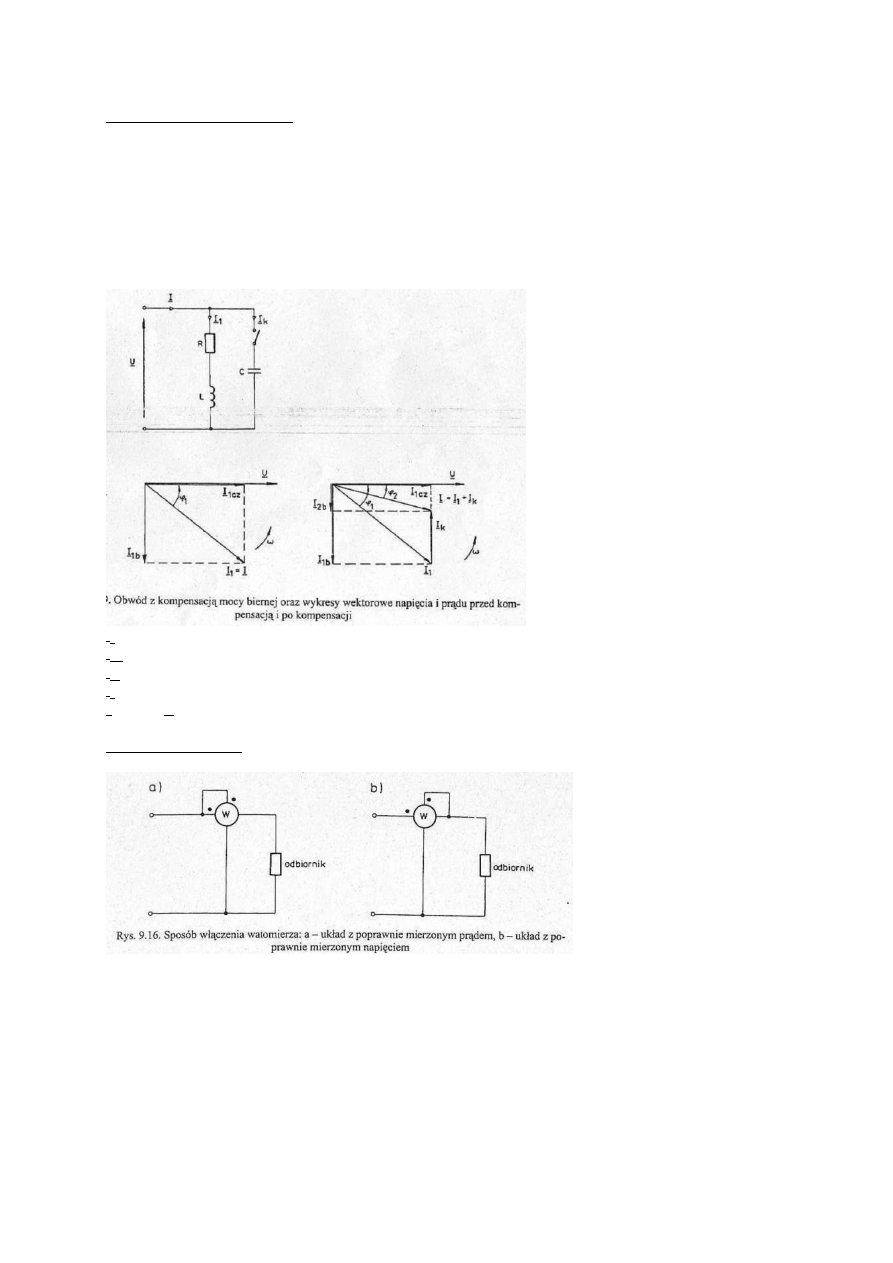
Poprawa współczynnika mocy
Współczynnik Mocy= cosϕ
ϕ- kąt przesunięcia fazowego między napięciem a prądem
Schemat zastępczy najczęściej występującej grupy odbiorników energii elektrycznej to obwód złożony z
rezystora R i cewki L.
środki poprawy wsp. Mocy:
-Naturalne (właściwy dobór mocy silników asynchronicznych, wyłączanie silników, spawarek, transformatorów
itp. Pracujących na biegu jałowym),
-Sztuczne (kompensacja mocy biernej indukcyjności przez równoległe włączenie do odbiorników indukcyjnych
urządzenia pobierającego moc bierną pojemnościową. Kondensator lub kompensator asynchroniczny),
I
1
- Prąd pobierany
I
1cz
- składowa czynna
I
1b
- składowa bierna
I
k
- prąd bierny pojemnościowy pobierany przez kondensator
𝐼
𝑘
= 𝑗𝜔𝐶𝑈
Pomiar mocy czynnej.
- Układ jednofazowy
-układ 3 fazowy czteroprzewodowy
Moc czynna jest sumą z 3 watomierzy
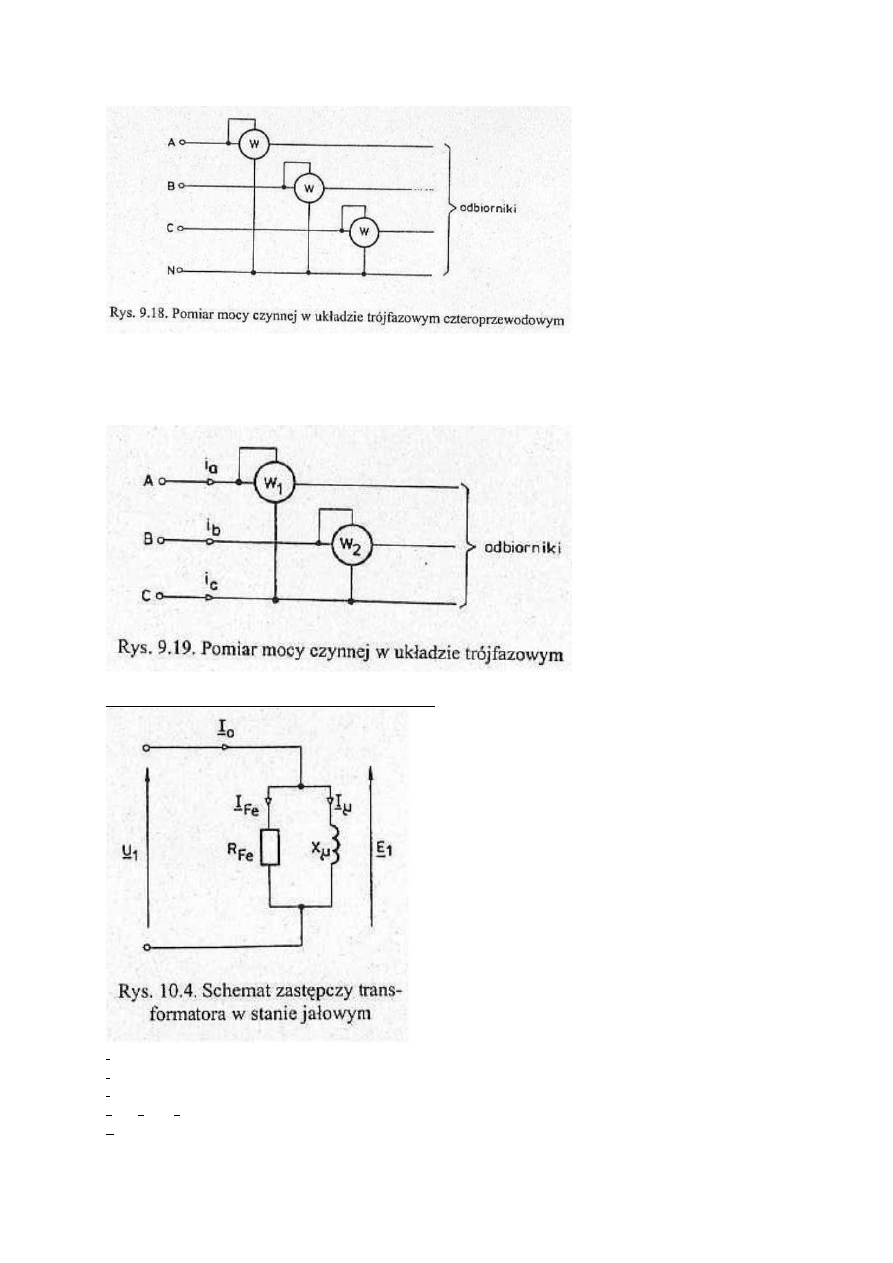
-układ 3 fazowy symetryczny
Jeden watomierz podłączony jak wyżej, obojętnie do której fazy, moc mnożymy razy 3
-układ trójprzewodowy
Wskazania watomierzy dodajemy. Jeżeli wskazówka watomierza odchyla się w przeciwną stronę należy
przełączyd jego zaciski prądowe lub napięciowe i traktowad wskazania jako ujemne.
Schemat zastępczy transformatora w stanie jałowym
I
Fe
- Prąd związany ze stratami w rdzeniu
I
µ
- Prąd magnesujący
I
o
- Całkowity prąd stanu jałowego
𝐼
𝑜
= 𝐼
𝐹𝑒
+ 𝐼
𝜇
E
1
- Siła elektromotoryczna obw. Pierwotnego
R
Fe
- Rezystancja odwzorowują straty mocy w rdzeniu
X
µ
- Reaktancja główna transformatora
U
1
- Napięcie zasilające obw. Pierwotny
Schemat zastępczy transformatora w stanie obciążonym
I
Fe
- Prąd związany ze stratami w rdzeniu
I
µ
- Prąd magnesujący
I
o
- Prąd stanu jałowego
R
Fe
- Rezystancja odwzorowują straty mocy w rdzeniu
X
µ
- Reaktancja główna transformatora
Z
odb
- impedancja odbiornika
ϑ- przekładnia transformatora
I
1
- Prąd obwodu pierwotnego 𝐼
1
= 𝐼
0
+ 𝐼
2
′
E
1
- Siła elektromotoryczna obw. Pierwotnego
U
1
- Napięcie zasilające obw. Pierwotny
I
2
- Prąd obwodu wtórnego
E
2
- Siła elektromotoryczna obw. wtórnego
U
2
- Napięcie zasilające obw. wtórny
Symbole oznaczone prim- wielkości występujące w obw. Wtórnym przeliczone na stronę uzwojenia
pierwotnego
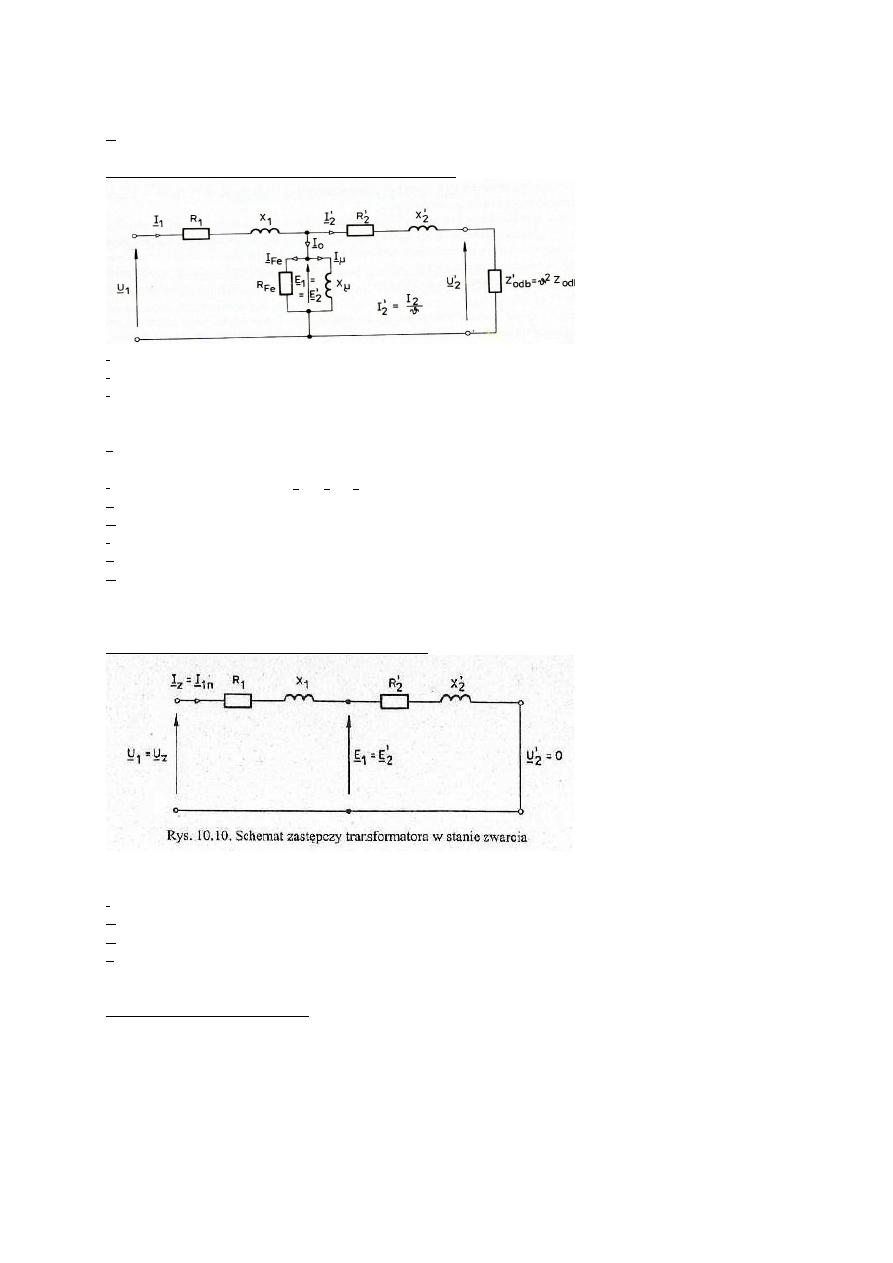
Schemat zastępczy transformatora w stanie zwarcia
R
1
R
2
- rezystancje uzwojeo
X
1
X
2
- reaktancje rozproszeniowe
I
1n
- prąd znamionowy
U
2
- napięcie zwarcia
U
1n
- napięcie znamionowe
E
1
- Siła elektromotoryczna obw. Pierwotnego
Symbole oznaczone prim- wielkości występujące w obw. Wtórnym przeliczone na stronę uzwojenia
pierwotnego
Straty mocy w transformatorach
Straty mocy czynnej można w przybliżeniu ograniczyd do strat mocy w rdzeniu ΔP
Fe
oraz strat mocy w
uzwojeniu ΔP
Cu
.
𝜟𝑷
𝑭𝒆
= ∆𝑷
𝒉
+ ∆𝑷
𝒘
ΔP
h
- straty histerezowe związane z cykliczny przemagnesowywaniem rdzenia
∆𝑷
𝒉
= 𝒌
𝒉
𝑩
𝒎
𝟐
𝒇
k
h
- współczynnik proporcjonalności zależny od materiału rdzenia
B
m
- amplituda indukcji magnetycznej
f- częstotliwośd prądu
ΔP
w
- straty może związane z indukowaniem się i przepływaniem prądów wirowych
Aby je ograniczyd:
-rdzenie wykonuje się z wielu cienkich blach odizolowanych od siebie
-blachy wykonuje się ze stali zawierającej dużo krzemu co znacznie zwiększa rezystywnośd
∆𝑷
𝒘
= 𝒌
𝒘
𝑩
𝒎
𝟐
𝒇
𝟐
𝒅
𝟐
𝝆
k
w
- współczynnik proporcjonalności zależny od materiału rdzenia
d- grubośd blach
B
m
- amplituda indukcji magnetycznej
f- częstotliwośd prądu
d- grubośd blach
ρ- rezystywnośd blach
Straty mocy w uzwojeniach związane są z przepływem prądów przez uzwojenia pierwotne (indeks 1) oraz
wtórne (indeks 2)
∆𝑷
𝑪𝒖
= 𝑰
𝟏
𝟐
𝑹
𝟏
+ 𝑰
𝟐
𝟐
𝑹
𝟐
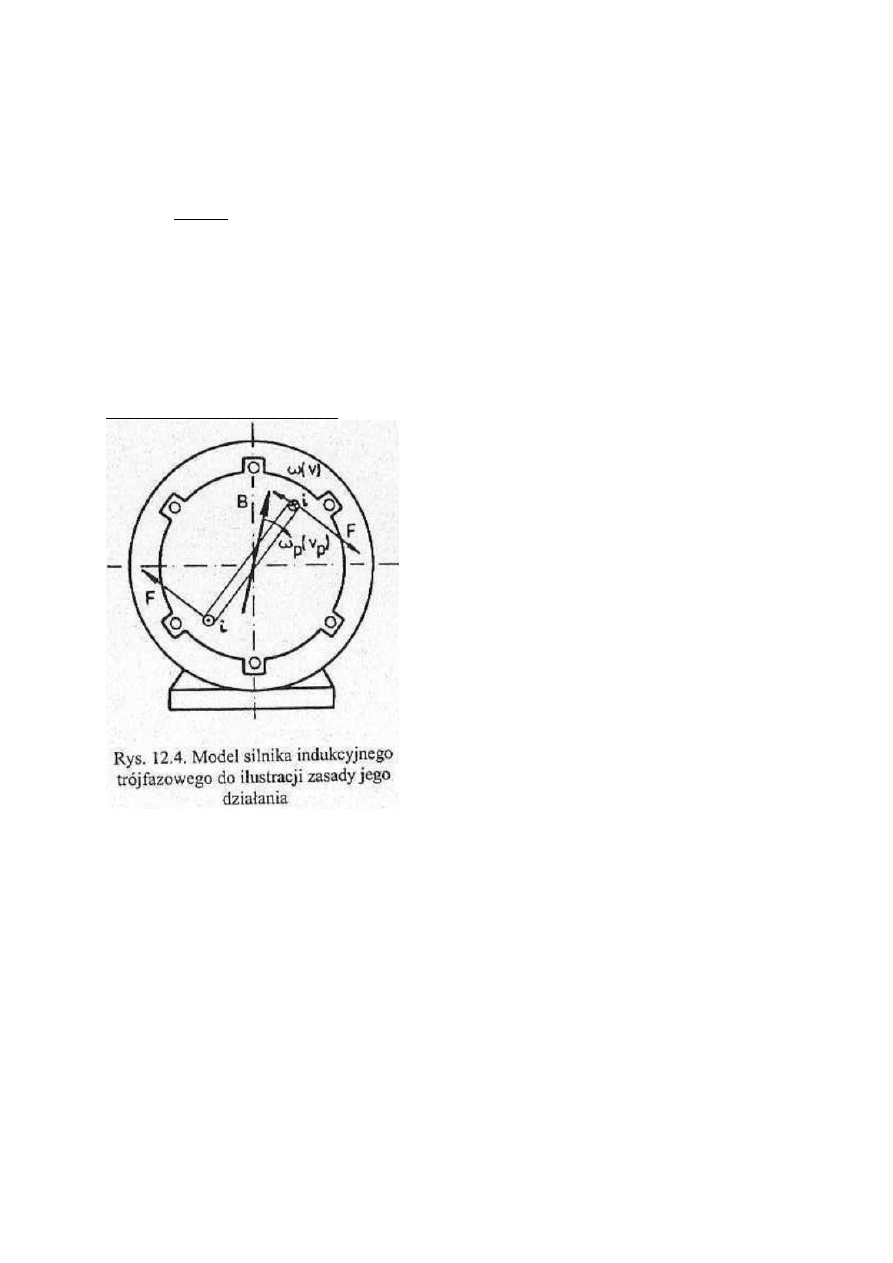
Zasada działania silnika indukcyjnego
Zasadę tą można przedstawid na uproszczonym modelu silnika, złożonym ze stojana, w którym układ cewek
zasilany z sieci trójfazowej wytwarza pole magnetyczne wirujące, i wirnika którym jest przymocowana do
ułożyskowej osi ruchomej cewka mająca uzwojenie zwarte. Symbolicznie przedstawiona jako cewka o jednym
zwoju – ramka. Gdy pole magnetyczne wirujące z prędkością kątową ω
p
zbliża się z prędkością liniową v
p
do
początkowo nieruchomej ramki, wskutek zmiany tego pola magnetycznego w prętach ramki równoległych do
osi obrotu indukują się siły elektromotoryczne. Pole przecina pręty ramki z prędkością v
p
, więc wartośd
chwilowa siły elektromotorycznej indukowanej w pręcia ramki równoległym do obrotu:
𝒆 = 𝑩𝒍𝒗
B- wartośd indukcji magnetycznej
l- długośd pręta równoległego do osi
v- względna prędkośd pręta ramki
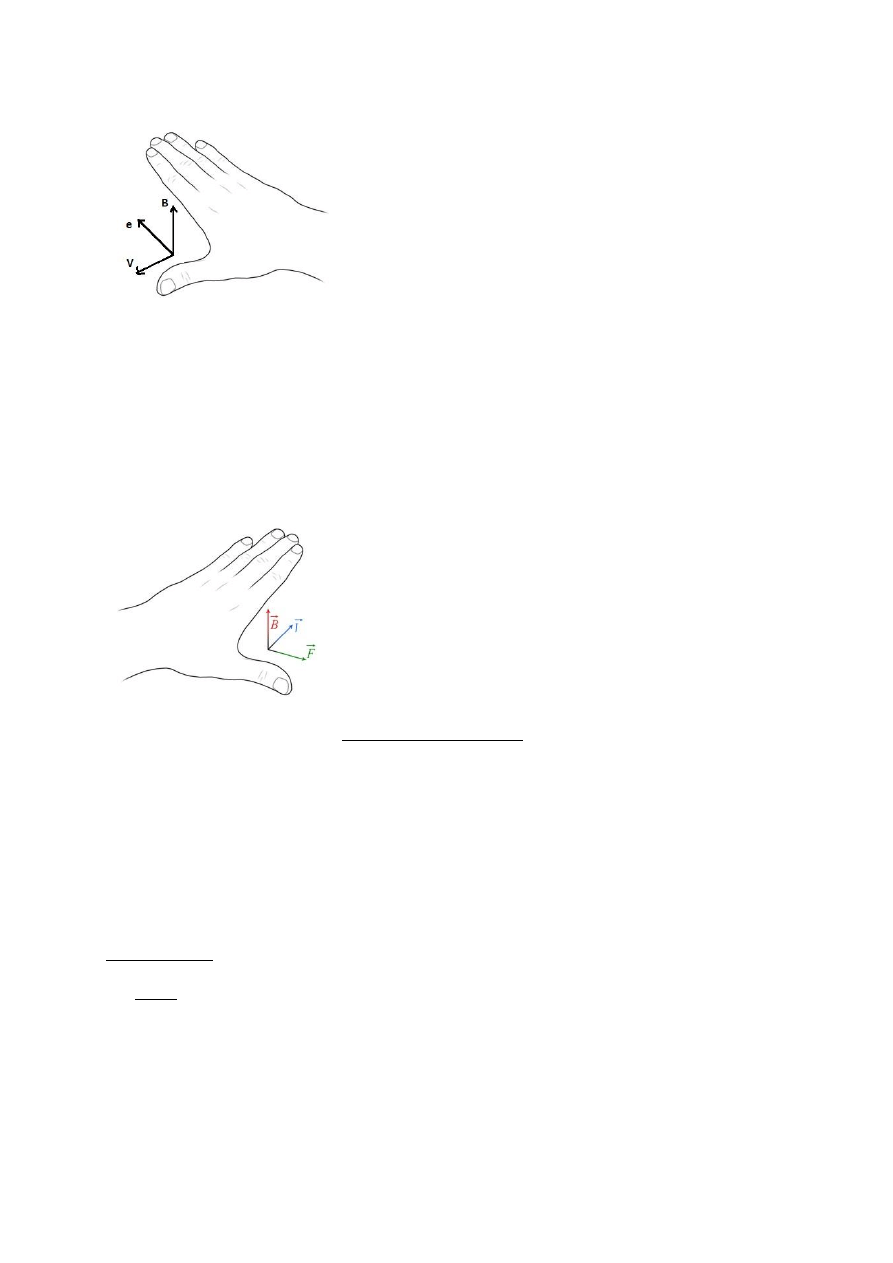
Kierunek i zwrot siły F można wyznaczyd z reguły prawej dłoni, jednak aby użyd reguły należy zmienid układ
odniesienia zakładając że poruszamy się razem z polem magnetycznym. Dłoo układamy tak, że linie pola
magnetycznego wchodzą do niej a kciuk ustawiony prostopadle do wyprostowanych palców wskazuje kierunek
i zwrot ruchu pręta v (przeciwnego do v
p
).4 wyprostowane palce wskazują zwrot i kierunek siły
elektromotorycznej indukowanej w pręcie równoległym do osi obrotu (na rysunku X- wektor zwrócony do
kartki, ●- wektor zwrócony od kartki).
Siła powoduje że w zamkniętej ramce płynie prąd elektryczny (i). Powoduje on, że na każdy pręt działa zgodnie
z prawem Ampere’asiła elektrodynamiczna:
𝑭 = 𝑩𝒊𝒍
B- wartośd indukcji magnetycznej
i- prąd indukowany w ramce
l- długośd pręta równoległego do osi
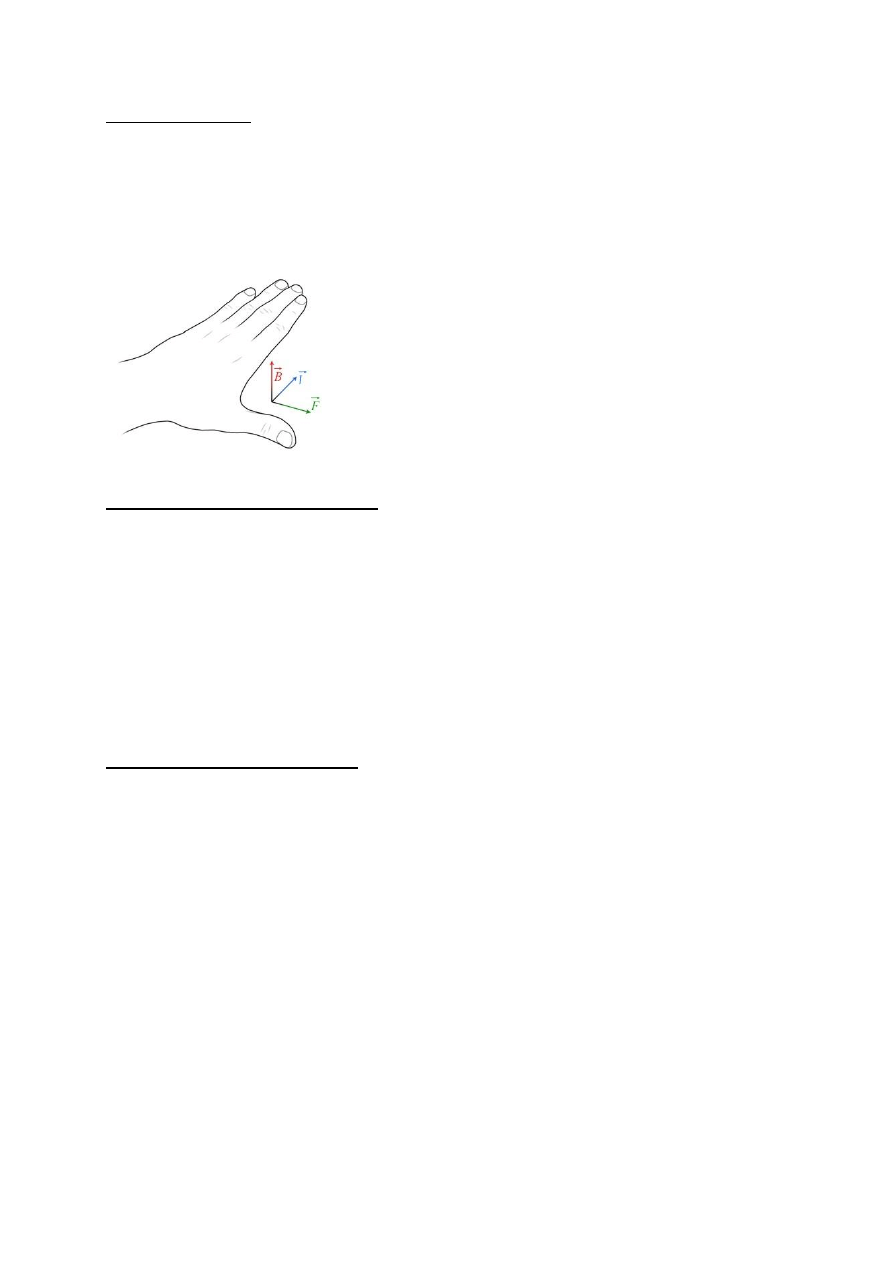
Kierunek i zwrot siły elektrodynamicznej wyznacza się z reguły lewej dłoni. Linie pola magnetycznego wchodzą
do dłoni, cztery palce wskazują kierunek płynącego prądu w pręcie a kciuk ustawiony prostopadle do palców
wskazuje zwrot i kierunek siły elektrodynamicznej.
Budowa silnika indukcyjnego
Silnik składa się z części mechanicznej- stojana i wirnika. Rdzeo magnetyczny stojana umieszczony jest w
kadłubie stalowym żeliwnym lub aluminiowym. Jest wykonany w kształcie pierścienia z pakietu blach
ferromagnetycznych odizolowanych od siebie. Na wewnętrznej powierzchni pierścienia znajdują się
symetrycznie rozmieszczone żłobki w których znajdują się cewki wytwarzające wirujące pole magnetyczne.
Rdzeo wirnika ma kształt walca wykonanego z pakietu blach ferromagnetycznych odizolowanych od siebie. Na
powierzchni walca wzdłuż wału znajdują się żłobki w których w silniku pierścieniowym umieszczone są cewki
trójfazowe których kooce połączone są z trzema pierścieniami ślizgowymi umieszczonymi na wale, są one
odizolowane od siebie i od wału. Do pierścieni przylegają szczotki połączone z zaciskami na tabliczce zaciskowej
silnika. Umożliwia to włączenie do obwodu wirnika urządzeo rozruchowych i regulacyjnych. W silniku
klatkowym w żłobkach rdzenia wirnika znajdują się pręty zwarte pierścieniami czołowymi. Zazwyczaj nie są one
izolowane od rdzenia.
Prawo Coulomba
Siła F oddziaływania dwóch ładunków punktowych
𝑭 =
𝑸
𝟏
𝑸
𝟐
𝟒𝝅𝜺𝒓
𝟐
Q
1
, Q
2
- ładunki punktowe *C+- Kulomb
r- odległośd ładunków od siebie *m+
ε- przenikalnośd elektryczna ośrodka
𝜺 = 𝜺
𝒓
𝜺
𝟎
ε
r
- względna przenikalnośd elektryczna ośrodka
ε
0
- przenikalnośd elektryczna próżni
Siła elektrodynamiczna
Działa na przewodnik w polu magnetycznym
𝑭 = 𝑩𝑰𝒍 𝐬𝐢𝐧 𝜶
B- indukcja magnetyczna
I- natężenie prądu
l- długośd przewodnika
α- kąt między kierunkiem przepływy prądu a kierunkiem linii pola magnetycznego
Kierunek i zwrot siły elektrodynamicznej określa reguła lewej dłoni
22. Metody rozruchu silników indukcyjnych
Rozruch: przejście wirnika od stanu postoju do stanu pracy ustalonej, w danych warunkach zasilania i
obciążenia. Może on nastąpić tylko wówczas gdy wytworzony przez silnik w chwili właczenia moment
rozruchowy będzie wiekszy od momentu hamującego. Mr>Mh Następuje gdy moment rozruchu > moment
hamujący. Uruchmianie silników indukcyjnych klatkowych. Bezpośrednie właczenie do sieci stosowane w
przypadku silnikow do 3kW. przypadku silników mających moc od 3kW zmniejszenie pradu rozruchu uzyskuje
się przez obniżenie napiecia doprowadzającego do uzwojen Az silnika w czasie rozruchu.. inny sposób polega na
tym ze uzwojenie stojana łaczy się z sieciapoprzezz dodatkowe rezystory albo dławki jest stosowany
sporadycznie. W zależności od rozdaju zastosowanego autotransformatora napiecie podnosi się płynie skokowo.
Uruchomienie silników indukc pierścieniowych w silniku induk pierścieniowym prad rozruchu może być
zmniejszony przez wlaczenie w obwoź uzwojenia wirnika. Dodatkowych rezystorów tworząc tzw rozrusznik.
Rozrusznik jest układem 3 kilkustopniowych rezystorow zmontowanych we wspolnej obudowie i połacznych w
gwiaazde. Uzwojenie stojana silnika połaczone jest w trojkat uzwojenie wirnika natomiastwukaladzie
gwiazdowym połaczone jest z czterostopniowym rozrusznikiem.
18. Praca równoległa transformatorów
Do transformowania energii elektrycznej zamiast 1 transformatora o mocy dobranej do obciążenia szczytowego
stosuje się 2 transformatory mniejsze połączone równolegle. W warunkach zmiennego obciążenia układ taki
stwarza możliwość zmniejszenia strat energii związanej z jej transformacją. Przy obciążeniu szczytowym
pracują 2 transformatory. W dolinie obciążenia wyłącza się jeden z transformatorów a zostawia włączony ten dla
którego aktualne obciążenie zbliżone jest do optymalnego.Aby współpraca transformatorów była optymalna, tak
pod względem technicznym jak i ekonomicznym, transformatory pracujące równolegle muszą mieć:
-Warunek pierwszy - jednakowych grup połączeń - wynika z koniecznej zgodności w fazie sił
elektromotorycznych odpowiadających sobie faz transformatorów przeznaczonych do pracy równoległej.
- Warunek drugi - jednakowe przekładnie - wynika z koniecznej równości sił elektromotorycznych
indukowanych w uzwojeniach dolnego napięcia. Przy niejednakowych przekładniach te siły elektromotoryczne
nie są równe
-Warunek trzeci -jednakowe napięcia zwarcia - wynika z faktu, że transformatory współpracujące równolegle
obciążają się odwrotnie proporcjonalnie do ich napięć zwarcia, tzn. transformator mający mniejsze napięcie
zwarcia przyjmuje na siebie większe obciążenie.
- Warunek czwarty - stosunek mocy znamionowych współpracujących równolegle transformatorów nie większy
od 3 - związany jest z sumowaniem się prądów oddawanych przez transformatory.
Wyszukiwarka
Podobne podstrony:
Opracowane wszystkie pytania
Opracowane wszystkie pytania
Wszystko pytania opracowane przez dziewczyny
Elektrotechnika opracowanie pytania
Elektrotechniaka- opracowane pytania, Studia, SiMR, II ROK, III semestr, Elektrotechnika i Elektroni
IMiR-lab pytania dla studentow, MiBM, Nauczka, 2 semstr, elektrotechnika, opracowania etc
wszystkie pytania, Szkoła, Politechnika 1- 5 sem, SEM IV, Elektronika i Energoelektronika. Wykład, P
2008. opracowanie pytań, Szkoła, Politechnika 1- 5 sem, SEM IV, Elektronika i Energoelektronika. Wyk
ETYKA wszystkie pytania opracowane
Maszyny Elektryczne Opracowanie Pytań Na Egzamin
MAS wszystkie pytania testowe 2007
licencjat - opracowania (wszystkie
Elektra I ściąga (krótkie pytania)
wszystkie pytania
wszystkie pytania z platformy WORD
Biochemia wszystkie pytania
Elektrotechnika i Elektronika Opracowanie 6
więcej podobnych podstron