1. Cewka indukcyjna
,
przewodnik elektryczny nawinięty na rdzeń w n zwojach, charakteryzujący się dużą indukcyjnością statyczną L, daną wzorem L = nΨ/I,
gdzie Ψ - strumień magnetyczny, I - natężenie prądu w przewodniku.
Dla toroidalnej cewki jednokrotnie nawiniętej L = n
2
µµ
0
r
2
/2R,
gdzie µ - przenikalność magnetyczna materiału rdzenia, µ
0
- przenikalność magnetyczna próżni równa
4π·10
-7
H/m, r - promień rdzenia, R - promień całej cewki.
Cewkę indukcyjną wykorzystuje się w urządzeniach elektrycznych jako elementy filtrów, obwodów drgających i dla zwiększenia
indukcyjności układu.
2. Kondensator elektryczny,
przyrząd elektryczny zbudowany z dwóch (lub więcej) elementów wykonanych z przewodnika, rozdzielonych dielektrykiem. Elementy
przewodzące nazywane są okładkami. Zazwyczaj dąży się do maksymalizacji ich powierzchni.
Kondensator elektryczny charakteryzuje jego pojemność C (wyrażana w faradach). Zależy ona (na ogół dość złożenie) od konfiguracji
geometrycznej okładek oraz, wprost proporcjonalnie, od przenikalności dielektrycznej rozdzielającego je izolatora (izolator elektryczny),
określa zdolność do akumulacji ładunku elektrycznego Q przy różnicy potencjału U. C=Q/U. Układ kondensatorów połączonych równolegle
ma pojemność równą sumie pojemności kondensatorów składowych.
Dwa kondensatory o pojemnościach C
1
i C
2
połączone szergowo mają łączną pojemność równą C
1
C
2
/(C
1
+C
2
). Energia zgromadzona w
kondensatorze wynosi W=CU
2
/2. W obwodach prądu zmiennego sinusoidalnego o częstości kołowej równej ω kondensator elektryczny
wykazuje reaktancję daną wzorem: X
c
=-1/(ωC) (kapacytancja), przy czym natężenie prądu płynącego w obwodzie wyprzedza o π/2 radianów
napięcie.
Ze względu na parametry eksploatacyjne kondensatory (oprócz pojemności) są charakteryzowane przez napięcie robocze, napięcie próbne,
oporność izolacji, kąt strat dielektrycznych, termiczny współczynnik pojemności i tolerancję (tj. maksymalne dopuszczalne odchylenia tych
wielkości od ich wartości znamionowych).
3. Rezystor,
opornik elektryczny, dwukońcówkowy element elektryczny bierny, którego podstawowym parametrem jest rezystancja, a pozostałe
parametry (pojemność i indukcyjność) są nieistotne.
Zadaniem rezystora w obwodzie elektrycznym jest przede wszystkim ustalenie wartości prądu lub podział napięcia (wiąże się to z zamianą w
rezystorze energii elektrycznej w ciepło). Składa się z korpusu, części oporowej i pokrycia zabezpieczającego część oporową przed
uszkodzeniem.
Moc wydzielona na rezystorze wynosi P=UI=U
2
/R=I
2
R, gdzie U i I oznaczają napięcie i natężenie prądu elektrycznego (dla prądu zmiennego
są to odpowiednie wartości skuteczne): związek pomiędzy U, I oraz R określa prawo Ohma.
W zależności od rodzaju materiału użytego na część oporową rozróżnia się rezystory: warstwowe (bardzo cienka warstwa z węgla lub metalu
naniesiona na rurkę ceramiczną), drutowe (drut ze stopów oporowych nawinięty na rurkę ceramiczną) oraz objętościowe (lity element
oporowy, np. węgiel elektrochemiczny, przewodzący prąd całą swoją objętością).
Ze względu na możliwości regulacji dzieli się rezystory na: stałe (których rezystancja została ustalona w czasie produkcji i nie można jej
zmienić) oraz nastawne, tzw. potencjometry.
Rezystory nastawne, służące do celów regulacyjnych lub do doboru właściwych warunków pracy obwodu elektrycznego, dzieli się na:
rezystory o regulacji ciągłej (np. suwakowe, jedno- i wieloobrotowe) oraz o regulacji skokowej (np. dekadowe).
Specyficzną odmianą rezystorów jest fotoorezystor. Rezystory są szeroko stosowane we wszystkich dziedzinach elektroniki i elektrotechniki.
4. Pole magnetyczne,
jedna z postaci pola elektromagnetycznego: jest to pole wytwarzane przez zmiany pola elektrycznegow czasie , w szczególności przez układ
poruszających się ładunków (makroskopowo ruch ten może objawiać się jako istnienie niezerowego momentu magnetycznego).
Pole magnetyczne działa na poruszające się ładunki (prąd elektryczny). Pole magnetyczne charakteryzują wektory natężenia pola
magnetycznego H i indukcji magnetycznej B. Oddziaływanie pola magnetycznego z pojedynczym ładunkiem opisuje wzór na siłę Lorentza.
Dla prądu płynącego w przewodniku oddziaływanie pola magnetycznego przedstawia prawo Ampère’a. Pole magnetyczne wytwarzane przez
obwód z prądem określa prawo Biota-Savarta. Pole magnetyczne można opisać równaniami divB = 0 i rotH = j (równania Maxwella).
5. Impedancja,
Z, uogólniona oporność obwodu elektrycznego, w ogólności dana funkcją zespoloną. Dla prądu zmiennego o częstości ω, dla przebiegu
iφ(ω)
, gdzie: R(ω) − rezystancja, X(ω) − reaktancja
φ(ω) - kąt fazowy impedancji,
ω - częstość kołowa zmian prądu, przy czym pomiędzy tymi wielkościami zachodzą związki:
Impedancja wyraża się w omach (w układzie SI), dla obwodów złożonych stosuje się takie same prawa składania jak dla rezystancji
(równoległe i szeregowe łączenie oporów). Impedancja dla kondensatora o pojemności C wynosi 1/(iωC), dla cewki o indukcyjności L
wynosi iωL (induktancja), dla opornika (o oporze R) Z=R. W szczegółowych zagadnieniach dotyczących falowodów definiuje się
impedancję indukcyjną (bocznikową), falową oraz pojemnościową.
6. Kondunktancja
(przewodność elektryczna) jest odwrotnością rezystancji. Jest więc miarą podatności elementu na przepływ prądu elektrycznego.
Zwyczajowo konduktancję oznacza się symbolem G (wielka litera G).
Jednostką konduktancji w układzie SI jest simens (1 S).
Miarą podatności materiału na przepływ prądu elektrycznego jest konduktywność. Dla znanych wymiarów geometrycznych przewodnika i
konduktywności materiału, z jakiego został wykonany, jego konduktancję określa wzór:
gdzie:
l – długość przewodnika,
S – pole przekroju poprzecznego elementu,
σ – konduktywność (przewodność właściwa) materiału.
Powyższy wzór określony jest tylko dla układów makroskopowych. W przypadku układów mezoskopowych wielkość ta wyraża się inaczej.
Dla idealnego drutu kwantowego wyraża się ona wzorem:
gdzie:
e – ładunek elementarny,
h – stała Plancka,
N – liczba otwartych kanałów.
Konduktancja dotyczy obwodów prądu stałego, a w obwodach prądu zmiennego tylko elementów rezystancyjnych (rezystor). Uogólnieniem
pojęcia konduktancji na obwody prądu zmiennego zawierającego elementy pojemnościowe (kondensator) i indukcyjne (cewka) jest
admitancja.
7. Rezystancja
(opór, oporność
) jest miarą oporu czynnego, z jakim element przeciwstawia się przepływowi prądu elektrycznego.
Zwyczajowo rezystancję oznacza się symbolem R.
Jednostką rezystancji w układzie SI jest om, której symbolem jest Ω.
Odwrotność rezystancji to konduktancja, której jednostką jest simens.
Dla większości materiałów rezystancja nie zależy od natężenia prądu, wówczas natężenie prądu jest proporcjonalne do przyłożonego
napięcia. Zależność ta znana jest jako prawo Ohma:
gdzie
I — natężenie prądu elektrycznego,
U — napięcie elektryczne.
Rezystancja przewodnika o jednakowym przekroju poprzecznym do kierunku przepływu prądu jest proporcjonalna do długości przewodnika,
odwrotnie proporcjonalna do przekroju i zależy od materiału, co wyraża wzór:
gdzie
l — długość elementu,
S — pole przekroju poprzecznego elementu,
ρ — rezystywność przewodnika.
Rezystywność, zwana oporem właściwym, jest oporem elementu o jednostkowej długości i jednostkowym polu przekroju poprzecznego.
Niektóre substancje przejawiają specyficzne właściwości ze względu na rezystancję – zobacz: rezystancja ujemna, nadprzewodnictwo.
W obwodach prądu przemiennego natężenie prądu zależy nie tylko do rezystancji lecz także od reaktancji elementu. Uogólnieniem i
rozwinięciem pojęcia rezystancji w obwodach prądu przemiennego na elementy pojemnościowe (kondensator) i indukcyjne (cewka) jest
impedancja. Rezystancja jest wówczas częścią rzeczywistą impedancji zespolonej.
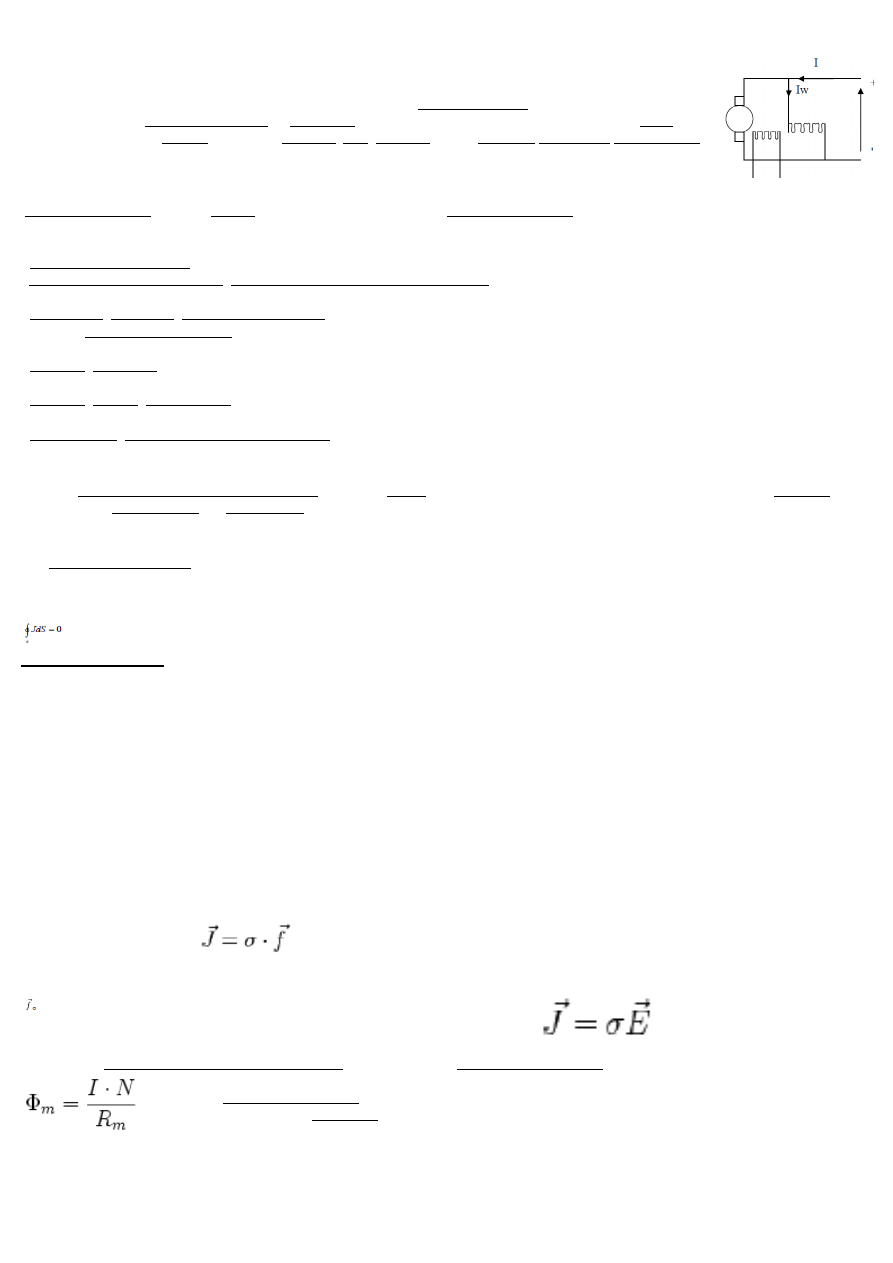
8. Komutator –
element przełączający umieszczany na wirniku komutatorowych maszyn elektrycznych (silników prądu stałego i generatorów prądu stałego
zwanych także prądnicami). Komutator umożliwia przepływ prądu elektrycznego do wirnika z synchronicznym z obrotem wirnika
przełączaniem kierunku prądu w uzwojeniach wirnika. Komutator zbudowany jest z dielektrycznego walca o wysokiej odporności
temperaturowej, nałożonego na oś wirnika. Na powierzchni walca umieszczone są wzdłużnie sekcje, najczęściej miedziane. Do nich
podłączone są kolejne uzwojenia wirnika. Sekcje izolowane są między sobą przy pomocy polimerowych przekładek. Po powierzchni walca
ślizgają się grafitowe szczotki dociśnięte przy pomocy sprężyn.
W przypadku prądnicy stałe pole magnetyczne wytworzone w uzwojeniu wzbudzenia - magneśnicy indukują w obracającym się uzwojeniu
wirnika przemienną siłę elektromotoryczną indukcji. Na każdy pełny obrót wirnika w uzwojeniu kierunek siły elektromotorycznej zmienia
się dwukrotnie. Komutator, jak widać na ilustracji, przełącza uzwojenie tak, że na zaciskach jest napięcie pulsujące o stałym kierunku. Dla
uproszczenia pokazano jedno uzwojenie. W rzeczywistych maszynach takich uzwojeń jest większa liczba.
W przypadku silnika prądu stałego komutator pozwala na takie przełączanie uzwojeń wirnika, by kierunek Siły elektrodynamicznej
powstającej w wirniku był stały.
(gdzie: U
1
- napięcie w uzwojeniu pierwotnym, I
1
- natężenie prądu w uzwojeniu pierwotnym, U
2
, I
2
- analogiczne wielkości dla uzwojenia
wtórnego), napięcie i natężenie prądu w uzwojeniu wtórnym określone jest przez równanie:
U
1
/U
2
= n
1
/n
2
= I
2
/I
1
.
W przypadku transformatorów rzeczywistych równanie to spełnione jest w dobrym przybliżeniu dla typowej częstości użytkowego prądu
zmiennego (50 Hz). Dla częstości wysokich nie jest ono spełnione, gdyż ze względu na wzrost znaczenia ubocznych efektów (np.
upływności przez tzw. pojemności międzyzwojowe) maleje sprawność transformatora.
9. Ochrona przed porażeniem prądem:
-zaznajamianie sie z istniejącą dokumentacją techniczną
-wykonanie oględzin badanej instalacji
-dokonywanie pomiarów rezystancji izolacji obwodów
-sprawdzanie oraz pomiar ochrony przez szybkie wyłączenie napięcia zasilania
-analiza wyników
-sporządzanie protokołów z wykonanych badań
Ochrona przed porażeniem prądem elektrycznym
W instalacjach elektrycznych jednym z wymaganych kryteriów jest aby były bezpieczne. Jednym z elementów bezpieczeństwa jest ochrona
przed porażeniem prądem elektrycznym. Porażenie prądem elektrycznym - efekt powstający w wyniku przepływu znacznego prądu
elektrycznego przez tkanki organizmów żywych.
Poprawnie zaprojektowana instalacja elektryczna nie może dopuścić do przepływ prądu przez ciało człowieka, dodatkowo powinna
ograniczać czas przepływu prądu porażeniowego i uniemożliwić bezpośredni dotyk do czynnych części urządzeń pracujących. Instalacja w
przypadkach zagrażających życiu człowieka, powinna sama się wyłączyć, aby nie stanowić dalszego niebezpieczeństwa.
Elementy ochrony przed porażeniem prądem
- Stosowanie układów sieciowych zgodnie z obowiązującymi normami
- Połączenia wyrównawcze
- Uziomy
- Ochrona przed dotykiem pośrednim
Do ochrony przed porażeniem prądem elektrycznym stosowane są:
• rękawice elektroizolacyjne;
• obuwie elektroizolacyjne;
• sprzęt ochrony oczu i twarzy chroniący przed łukiem elektrycznym powstającym przy zwarciu;
10. Podział maszyn elektrycznych:
a) transformatory
b) prądu stałego
c) prądu zmiennego:
- komutatorowe
- indukcyjne:
<pierścieniowe
<klatkowe
-synchroniczne
<jawno-biegunowe
<cylindryczne
<specjalne
10a) Kryteria podziału maszyn elektrycznych
1. Czy ma części w ruchu:
-stacjonarne
-będące w ruchu:
*posuwisto zwrotne
*rotacyjne obwodowe
2.Rodzaj napięcia:
-prąd stały
- prąd przemienny
3. Rodzaj pracy:
-ciągła S1
-dorywcza S2
-przerywana S3
11. Reaktancja (opór bierny, przeciwność
)
to wielkość charakteryzująca obwód elektryczny zawierający element o charakterze pojemnościowym (np. kondensator) lub element o
charakterze indukcyjnym (np. cewkę). Jednostką reaktancji jest om.
Reaktancję oznacza się na ogół symbolem X.
Gdy przez cewkę lub kondensator płynie prąd przemienny, wtedy część energii magazynowana jest w polu, odpowiednio magnetycznym lub
elektrycznym. Wywołuje to spadek napięcia wprost proporcjonalny do iloczynu prądu i reaktancji. W przypadku obwodów prądu stałego nie
mówi się o reaktancji, bowiem (pomijając stan nieustalony) cewka stanowi zwarcie, zaś kondensator przerwę w obwodzie.
Reaktancja idealnej cewki i kondensatora jest równa co do wartości bezwzględnej ich impedancji. Napięcie i prąd w takich elementach są
przesunięte w fazie o 90 stopni względem siebie. Znak liczby zależy od tego, czy prąd wyprzedza napięcie, czy napięcie wyprzedza w fazie
prąd.
Reaktancja cewki (opór indukcyjny, induktancja) ma znak dodatni i oblicza się ją ze wzoru:
gdzie L to indukcyjność własna cewki,
Reaktancja kondensatora (opór pojemnościowy, kapacytancja) ma znak ujemny
, oblicza się ją ze wzoru:
gdzie: C – pojemność kondensatora,
W układach wysokiej częstotliwości (układy o stałych rozłożonych) elementy o charakterze pojemnościowym i indukcyjnym często
uzyskuje się poprzez wprowadzenie do prowadnicy falowej nieciągłości, np. zwężenia.
Reaktancja połączonych szeregowo cewek i kondensatorów jest sumą
12. Maszyna elektryczna
- Urządzenie, które na zasadzie indukcji magnetycznej przetwarza energię albo bez udziału ruchu mechanicznego (transformator), albo z
udziałem ruchu mechanicznego (maszyna elektryczna wirująca albo liniowa)
. W układach elektromaszynowych następuje przetwarzanie
energii mechanicznej na elektryczną (w prądnicach), elektrycznej na mechaniczną (w silnikach) albo elektrycznej jednego rodzaju na
elektryczną innego rodzaju (w transformatorach i przetwornicach)
- Urządzenie elektromechaniczne przetwarzające energię mechaniczną na elektryczną (prądnica), elektryczną na mechaniczną (silnik
elektryczny) lub elektryczną na elektryczną o innych parametrach (przetwornica elektryczna)
Do najbardziej popularnych maszyn elektrycznych należą:
- Maszyny synchroniczna (silnik synchroniczny, prądnica synchroniczna)
- Maszyny indukcyjne (silnik asynchroniczny, prądnica asynchroniczna)
- Maszyny komutatorowe prądu stałego i zmiennego
- Transformatory
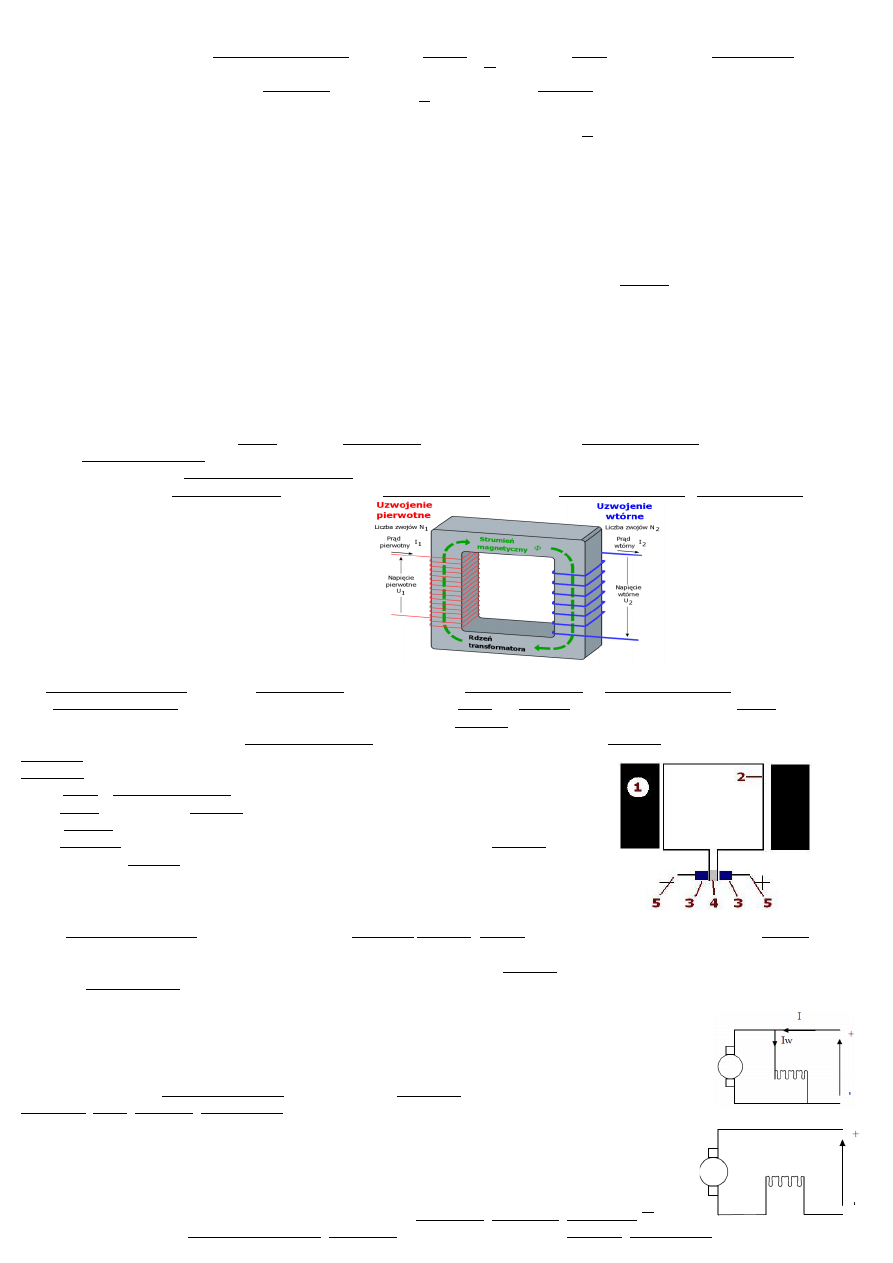
13. Transformator,
urządzenie elektrotechniczne służące do przenoszenia energii elektrycznej prądu zmiennego drogą indukcji z jednego obwodu elektrycznego
do drugiego. Transformator zbudowany jest z dwóch cewek (uzwojeń) nawiniętych na wspólny rdzeń.
Zmiany strumienia magnetycznego stowarzyszonego z prądem płynącym przez pierwszą cewkę (tzw. uzwojenie pierwotne) indukują
przepływ prądu elektrycznego w drugiej cewce (tzw. uzwojeniu wtórnym). Głównym parametrem użytkowym transformatora jest tzw.
przekładnia, czyli stosunek liczby zwojów w uzwojeniu pierwotnym n
1
do liczby zwojów w uzwojeniu wtórnym n
2
.
Dla idealnego transformatora, przy założeniu stuprocentowej sprawności transformacji energii, tj. gdy
U
1
I
1
= U
2
I
2
14. Budowa transformatora
zbudowany jest z dwóch lub więcej cewek (zwanych uzwojeniami), nawiniętych na wspólny rdzeń magnetyczny wykonany zazwyczaj z
materiału ferromagnetycznego.
Oba obwody są zazwyczaj odseparowane galwanicznie, co oznacza, że nie ma połączenia elektrycznego pomiędzy uzwojeniami, a energia
przekazywana jest przez pole magnetyczne. Wyjątkiem jest autotransformator, w którym uzwojenie pierwotne i uzwojenie wtórne posiadają
część wspólną i są ze sobą połączone galwanicznie.
15. Rodzaje silników prądu stałego:
1. Obcowzbudne
2. Samowzbudne:
- bocznikowe
- szeregowe
- szeregowo-bocznikowe
16. Silnik prądu stałego
jest silnikiem elektrycznym zasilanym prądem stałym i służy do zamiany energii elektrycznej na energię mechaniczną.
Jako maszyna elektryczna prądu stałego może pracować zamiennie jako silnik lub prądnica. W tym drugim przypadku wirnik napędzany jest
energią mechaniczną dostarczona z zewnątrz, a na zaciskach uzwojenia twornika odbierana jest wytworzona energia elektryczna.
Większość silników prądu stałego to silniki komutatorowe, to znaczy takie, w których uzwojenie twornika zasilane jest prądem poprzez
komutator. Jednak istnieje wiele silników prądu stałego które nie posiadają komutatora lub też
komutacja przebiega na drodze elektronicznej.
1. stojan z magnesem trwałym;
2.wirnik z uzwojeniem twornika – prostokątna ramka z drutu;
3. szczotki – doprowadzające prąd do uzwojenia twornika;
4.komutator – pierścień ze stykami – wyprowadzenia z ramki (uzwojenia twornika);
5.wyjścia do zasilania.
17. Silnik elektryczny obcowzbudny -
rodzaj maszyny elektrycznej komutatorowej, w której uzwojenie twornika (wirnika) i obwód wzbudzenia umieszczony na stojanie są
zasilane z oddzielnych źródeł.
W przypadku maszyn małej mocy układ do wzbudzenia silnika mogą być użyte magnesy trwałe. W większych maszynach stosuje się
wyłącznie elektromagnesy. Silniki obcowzbudne stosuje się w trakcji elektrycznej (tramwaje, kolej), w maszynach wyciągowych, dźwigach.
Regulacja prędkości może odbywać się przez sterowanie napięciem zasilania twornika lub rzadziej przez zmianę wartości strumienia
wzbudzenia.
18. silnik bocznikowy –
o uzwojeniu wzbudzenia w stojanie przyłączonym równolegle z uzwojeniem twornika. Charakteryzuje się małą
podatnością na zmianę prędkości obrotowej na skutek zmiany obciążenia. Stosowany głównie w napędach
obrabiarek, pomp, dmuchaw, kompresorów;
19. silnik szeregowy –
o uzwojeniu wzbudzenia w stojanie połączonym szeregowo z uzwojeniem twornika. Charakteryzuje się dużą
zależnością prędkości obrotowej od obciążenia. Zmniejszanie obciążenie powoduje wzrost prędkości
obrotowej (teoretycznie do nieskończenie wielkiej) i grozi tzw. rozbieganiem, a w konsekwencji
zniszczeniem silnika. Jest to jego poważna wada. Dlatego tego typu silników nie wolno włączać bez
obciążenia. Stosowane są głównie w trakcji elektrycznej (napędy lokomotyw, tramwajów, trolejbusów)
pojazdach mechanicznych (wózki akumulatorowe, rozruszniki samochodów), w napędach dźwigów, wentylatorów itp.
20. silnik szeregowo-bocznikowy –
o uzwojeniu wzbudzenia w stojanie połączonym z uzwojeniem twornika w sposób mieszany (część szeregowo, a
część równolegle). Charakteryzuje się brakiem głównej wady silnika szeregowego – możliwości jego
rozbiegania przy braku obciążenia, a także ma jego zalety – duży moment obrotowy w szerokim zakresie
obrotów i zależność prędkości obrotowej od obciążenia. Stosowany jest zazwyczaj jako silniki dużych mocy, tam
gdzie występuje ciężki rozruch: do napędu walcarek, pras, dźwigów oraz w napędach okrętowych mechanizmów
pokładowych.
21. Silnik elektryczny –
maszyna elektryczna, w której energia elektryczna zamieniana jest na energię mechaniczną.
Sposób zasilania
- Zasilane napięciem stałym:
*silnik elektryczny obcowzbudny, silnik prądu stałego z magnesami trwałymi
*silniki elektryczne samowzbudne:
<bocznikowy, szeregowy, szeregowo-bocznikowy
- Zasilane napięciem przemiennym :
*Jednofazowe
<klatkowy, szeregowy
*Trójfazowe
<klatkowy, liniowy, pierścieniowy
*Zasilane dwustronnie.
<synchroniczny, asynchroniczny-synchronizowany
22. Silnik klatkowy –
to rodzaj silnika elektrycznego asynchronicznego, w którym wirnik przyjmuje postać walca zbudowanego z pakietu blach ze żłobkami
wypełnionymi aluminiowymi lub miedzianymi prętami, do których przyłączone są pierścienie czołowe z tego samego metalu. Pręty razem z
pierścieniem tworzą rodzaj metalowej klatki.
23. 1 Prawo Kirchoffa
Suma naprężeń prądów wpływających do węzła jest równa sumie naprężeń prądów
wypływających z tego węzła
W postaci wektorowej:
Oznacza to, ze wektor gęstości prądu stałego J jest bezźródłowy.
2 Prawo Kirchoffa
Suma napięć źródłowych w dowolnym obwodzie zamkniętym prądu stałego równa
jest sumie napięć w odbiornikach
W postaci wektorowej:
- dotyczy bilansu napięć przy wyrażaniu tych napięć za pośrednictwem natężenia pola
elektrycznego/
Bilans napięcia na obwodzie
∫ E dl = ∫ Edl
24. Prawo Ohma
R =U/I
Natężenie prądu zmienia się w sposób proporcjonalny do napięcia mierzonego na końcach
przewodnika o oporze R do natężenia płynącego przez ten przewodnik.
Postać wektorowa:
Obecnie różniczkowe prawo Ohma w ośrodkach ciągłych wyraża się w postaci wektorowej:
gdzie
J – gęstość prądu,
σ – przewodność właściwa, która w ogólnym przypadku jest tensorem, a w ośrodkach
izotropowych jest stałą,
– gęstość siły Lorentza (siła Lorentza działająca na jednostkowy ładunek).
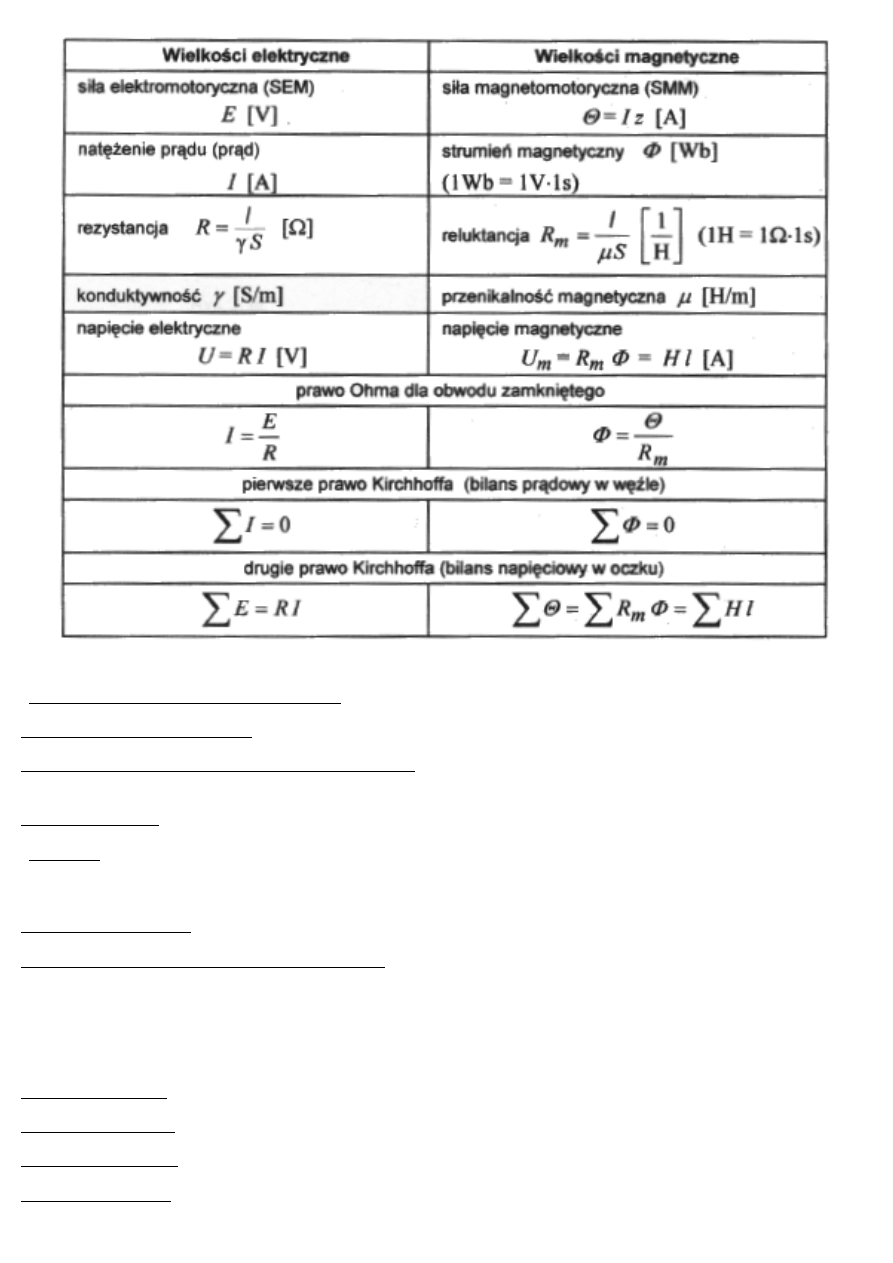
25. Prawo Ohma dla obwodu magnetycznego
jest analogią prawa Ohma dla obwodu elektrycznego. Dla zamkniętego obwodu magnetycznego prawo to jest wyrażone zależnością:
gdzie: Φ
m
- strumień magnetyczny (stały dla wszystkich odcinków obwodu), I - prąd magnesujący płynący przez liczbę
zwojów N, R
m
- całkowita reluktancja obwodu.
26. 1 Prawo Kirchoffa dla obwodów magnetycznych
Suma algebraiczna strumieni magnetycznych w węźle obwodu magnetycznego jest
równa zeru
0
2 Prawo Kirchoffa dla obwodów magnetycznych
Suma algebraiczna napięć magnetycznych w zamkniętym obwodzie magnetycznych
równa jest sumie algebraicznej wielkośći Iz w tym obwodzie
Um
Iz
27. Prawo Ohma dla obwodów magnetycznych
Um
Rm
Um – napięcie magnetyczne wzdłuż odcina obwodu
Rm - opór magnetyczny
- strumień magnetyczny w odcinku
28. Częstotliwość rezonansowa
· f - częstotliwość obwodu w Hercach
· L - indukcyjność cewki w henrach
· C - pojemność kondensatora w faradach
· ω - częstość kołowa w radianach/sekundę.
29. Dielektryk, izolator elektryczny –
materiał, w którym występuje niska koncentracja ładunków swobodnych w wyniku czego bardzo słabo przewodzony jest prąd elektryczny.
Oporność właściwa dielektryków jest większa od 10^6 ohm (dla dobrych przewodników, np. metali, wynosi 10^−8 – 10^−6 ohm).
30. Prąd indukowany –
prąd spowodowany przez indukowaną siłę elektromotoryczną.
31. Natężenie pola magnetycznego –
wielkość wektorowa charakteryzująca pole magnetyczne, w ogólnym przypadku określana z użyciem prawa Ampera wzorem:
gdzie:
H– natężenie pola magnetycznego,
I – prąd przepływający przez dowolną powierzchnię rozpiętą na zamkniętym konturze C.
Jego jednostką w układzie SI jest A/m (amper na metr).
Natężenie pola magnetycznego nie zależy od właściwości magnetycznych środowiska. W
materiałach
anizotropowych i bezstratnych, czyli niewykazujących pętli histerezy, wektory natężenia pola magnetycznego i indukcji magnetycznej mają
ten sam zwrot i kierunek. W materiałach nieliniowych wykazujących pętlę histerezy (np. ferromagnetykach) wektor indukcji może mieć inny
kierunek lub zwrot ze względu na energię anizotropii, indukowane prądy wirowe itp. Wartość kąta zawartego między wektorem natężenia
pola i indukcji magnetycznej jest w pewnym sensie miarą strat mocy występujących w takim materiale.
Natężenie pola magnetycznego jest wielkością charakteryzującą pole magnetyczne niezależną od własności materiału – wartością zależną
jest natomiast indukcja magnetyczna.
32. Siła magnetomotoryczna –
cyrkulacja wektora natężenia pola magnetycznego, czyli całka okrężna natężenia pola magnetycznego wzdłuż dowolnej zamkniętej krzywej:
i jest równa natężeniu prądu przepływającemu przez dowolną powierzchnię
ograniczoną krzywą całkowania.
33. Oddziaływania pole magnetycznego:
1. Na przewodnik z prądem w polu magnetycznym działa siła elektrodynamiczna
2. W przewodniku elektrycznym poruszającym się w polu magnetycznym generuje się SEM.
3. Obwód magnetyczny ma dostrzegalny charakter przestrzenny.
34. Obwód pasywny
Obwód elektryczny złożony wyłącznie z gałęzi pasywnych. Może to być obwód nierozgałęziony z rezystancjami szeregowymi lub
rozgałęziony w dowolnej konfiguracji płaskiej, względnie przestrzenny.
35. Prąd przemienny–
charakterystyczny przypadek prądu elektrycznego okresowo zmiennego, w którym wartości chwilowe podlegają zmianom w powtarzalny,
okresowy sposób, z określoną częstotliwością. Wartości chwilowe natężenia prądu przemiennego przyjmują naprzemiennie wartości
dodatnie i ujemne (stąd nazwa przemienny). Najczęściej pożądanym jest, aby wartość średnia całookresowa (tzn. składowa stała) wynosiła
zero.
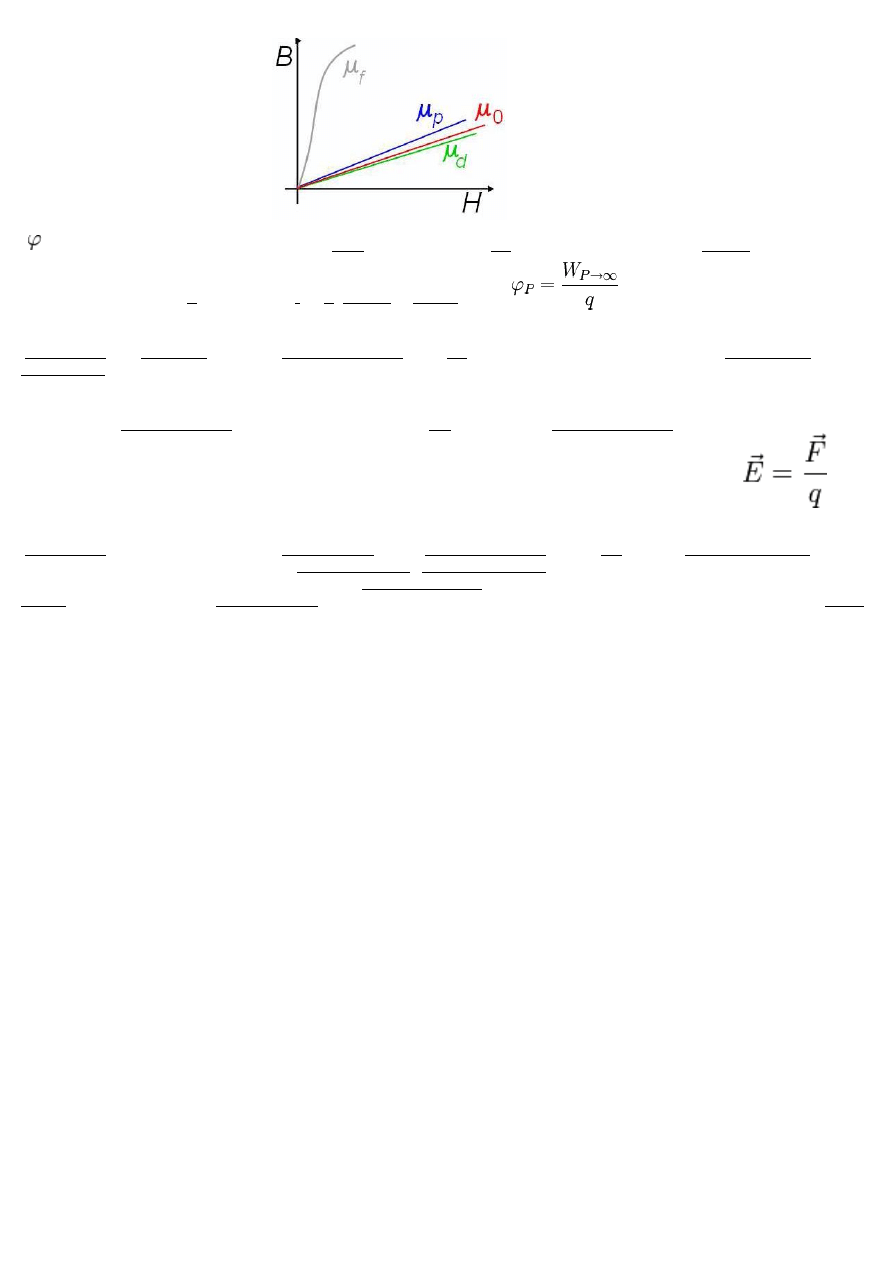
36. Krzywe magnesowania.
37. Potencjałem elektrycznym
dowolnego punktu P, pola nazywa się stosunek pracy W wykonanej przez siłę elektryczną przy przenoszeniu ładunku q z tego punktu do
nieskończoności, do wartości tego ładunku:
.
Jednostką potencjału jest 1 V (wolt) równy 1 J / 1 C (dżulowi na kulomb).
38. Pole elektryczne –
pole fizyczne, stan przestrzeni w której na ładunek elektryczny działa siła elektrostatyczna. Pole to opisuje się przez natężenie pola
elektrycznego lub potencjał elektryczny.
39. Natężenie pola elektrycznego
jest parametrem pola wektorowego E, definiowanym jako stosunek siły F działającej na ładunek elektryczny q znajdujący się w tymże polu
elektrycznym do wartości tegoż ładunku elektrycznego q:
Ładunek z pomocą którego określa się pole, zwany ładunkiem próbnym, musi spoczywać i być na tyle mały, by nie
zmieniać rozkładu ładunków w otaczającej przestrzeni.
40. Pole elektromagnetyczne –
pole fizyczne, stan przestrzeni w której na obiekt fizyczny mający ładunek elektryczny działają siły o naturze elektromagnetycznej. Pole
elektromagnetyczne jest układem dwóch pól: pola elektrycznego i pola magnetycznego. Pola te są wzajemnie związane a postrzeganie ich
zależy też od obserwatora, wzajemną relację pól opisują równania Maxwella. Własności pola elektromagnetycznego, jego oddziaływanie z
materią bada dział fizyki zwany elektrodynamiką. W mechanice kwantowej pole elektromagnetyczne jest postrzegane jako wirtualne fotony.
41.
42 Co to są?:
*charakterystyka mechaniczna silnika elektrycznego,
wykres momentu od prędkości obrotowej silnika
*dozwolony obszar pracy w silnikach,
zakres pracy dla pracy silnika, określenie obrotów, mocy
*nominalny punkt pracy silnika (rysunek, objaśnienie zależności)
punkt na charakterystyce mechanicznej dla prędkości znamieniowej
43. Wyjaśnij znaczenie wielkości fizycznych:
*moment znamionowy
moment dla znamieniowej prędkości
*rozruchowy
moment rozruchu
44. Co to jest?:
*ilość par biegunów silnika,
na każdej cewce jest jedna para biegunów
*jak zrealizować technicznie określoną ilość par biegunów?
ilość par biegunów decyduje o prędkości obrotowej
45. Czy istnieje silnik uniwersalny tzn. działający na prąd stały i zmienny? Jeśli tak to objaśnij jego budowę i
zasadę działania
silnik prądu stałego i jednofazowy prądu zmiennego mają taką samą budowę
46. Wyjaśnij wielkości fizyczne:
*prędkość znamionowa,
zaprojektowana optymalna prędkość, na której silnik powinien pracować
prędkość biegu jałowego,
prędkość bez obciążenia
*Prędkość synchroniczna,
prędkość równa polu magnetycznemu?
*prędkość dopuszczalna,
prędkość max dla silnika, taka aby się wał nie urwał, ani przewody nie spaliły

Potencjałem elektrycznym
φ dowolnego Puku P pola nazywamy stosunek pracy W wykonanej przez siłę elektryczna przy przenoszeniu
ładunku q z tego punktu do nieskończoności do wartości tego ładunku.
Pole elektryczne
– pole fizyczne. Stan przestrzeni w której na ładunek elektryczny działa siła. Pole to opisuje się przez natężenie pola
elektrycznego lub potencjał elektryczny
Natężenie pola elektrycznego
– jest wektorową wielkością fizyczną opisująca pole elektryczne, równą stosunkowi wektor siły
oddziaływania elektrostatycznego (F) działającej na umieszczony w danym punkcie pola ładunek próbny (Q) do wartości tego ładunku.
Pęd
– w mechanice wielkość fizyczna opisująca ruch ciała. Pęd mają wszystkie formy materii, np. ciała obdarzone masą, pole
elektromagnetyczne, pole grawitacyjne.
Pęd punktu materialnego
– jest równy iloczynowi masy [m] i prędkości [v] punktu. Pęd jest wielkością wektorową, kierunek i zwrot
pędu jest zgodny z kierunkiem i zwrotem prędkości.
Zasada zachowania pędu
– zamiana pędu następuje w wyniku działania na ciało siły przez pewien czas. Iloczyn siły i czasu jej działania
nazywany jest popędem siły.
Pole elektromagnetyczne
– pole fizyczne (konkretnie pole sił), san przestrzeni w której na ładunek elektryczny działają siły o naturze
elektromagnetycznej. Pole elektromagnetyczne jest układem dwóch pól pola elektrycznego i pola magnetycznego.
Pole magnetyczne
– w fizyce jest stanem (własnością) przestrzeni, w której siły działają na poruszające się ładunki elektryczne, a także na
ciała mające moment magnetyczny niezależnie od ich ruchu.
Wyszukiwarka
Podobne podstrony:
Maszyny Elektryczne Opracowanie Pytań Na Egzamin
instalacje i oświetlenie elektryczne opracowanie pytań na egzamin
elektro opracowanie
Elektrotechnika i Elektronika Opracowanie 3
elektra opracowanie
Elektrotechnika opracowanie pytań3
Elektrotechnika i Elektronika Opracowanie 7
Elektrotechnika i Elektronika Opracowanie 8
Elektrotechnika opracowanie wszystkie pytania
Własn elektr, Właściwości elektr.2, Opracował: Marcin Zając
IMiR-lab harmonogram 2014-KEiASPE, MiBM, Nauczka, 2 semstr, elektrotechnika, opracowania etc
Elektronika opracowanie pytan
Kompatybilność Elektromagnetyczna opracowanie
Elektrotechnika opracowanie by Alszere
Elektrotechnika opracowanie pytania
m4 d, MiBM, Nauczka, 2 semstr, elektrotechnika, opracowania etc
więcej podobnych podstron